
Abstract
Hydraulic actuator becomes an increasingly concerned driver for human-like robots. However, its dynamic performance under the control should be still further improved because hydraulic system is a typical nonlinearity system. Interval type-2 fuzzy logic controller is an advanced control method featured with high performance to deal with uncertain and nonlinear dynamics, so designing an interval type-2 fuzzy logic controller for the control of hydraulic is a feasible method. In this article, an improved drone squadron optimization-based approach is proposed to optimize interval type-2 fuzzy logic controller parameters. To verify the feasibility and priority of improved drone squadron optimization, a comparison on three different typical plants including proportional-derivative (PD) system, proportional-integral (PI) system, and PI nonlinear system between improved drone squadron optimization and other meta-heuristic algorithms is carried out. Simulation results demonstrate that improved drone squadron optimization not only gets an appropriate interval type-2 fuzzy logic controller for system control but also outperforms other popular algorithms in accuracy of performance.
Keywords
Introduction
In recent years, more and more legged robots (such as ATLAS and Big Dog from Boston Dynamics 1,2 and HyQ from Italy Polytechnic 3 ) have chosen hydraulic actuator as their drivers for the reason that hydraulic actuator can provide high power within limited size. 4 Hydraulic actuator is a typical nonlinear system, and conventional linear controller such as proportional-integral-derivative (PID) may not perform well in hydraulic system. 5 Therefore, there is an increasing demand of applying nonlinear controller to hydraulic actuator. Fuzzy logic controller (FLC) is a nonlinear controller which has been applied in various situations, 6 such as classification and wireless sensor, 7 control of robots, 8,9 and hydraulic system. 10 Recently, there is an increasing focus on the interval type-2 FLC (IT2FLC) because IT2FLC is featured with good performance to uncertainty and nonlinearity. 11 For these two advantages, IT2FLC is selected for the control of our hydraulic system, and expected to perform well in this study.
Although IT2FLC is featured with so much advantages, to get an appropriate IT2FLC for system control is of high difficulty. So IT2FLC optimization which can help us get a well-performed IT2FLC 12 is necessary for the design of hydraulic control strategy. The optimization methods for IT2FLCs can be roughly divided into three categories 11 : mathematical methods, heuristic methods, and hybrid methods which contain both of the methods above. Among the methods mentioned above, methods based on meta-heuristic algorithm are used for IT2FLC optimization.
Despite the fact that many researchers have proposed their IT2FLC mathematical optimization methods, difficulty of solving IT2FLC problems with mathematical methods still exists so the optimization of IT2FLC requires special attention. 11 Compared with the mathematical approaches, meta-heuristic methods are not dependent on the gradient of the object-function, which can enhance the practicability of meta-heuristic methods. Since meta-heuristic methods may help us to get a set of appropriate values of IT2FLCs, most meta-heuristic methods are time-costing because they need a lot of iterations in their evolutionary process. For the reason mentioned above, finding a meta-heuristic method which can get an IT2FLC with the best performance in acceptable time has become a focus of concern. 13
This article mainly concentrates on the optimization of IT2FLCs by using meta-heuristic methods, especially the improved drone squadron optimization (IDSO). This controller will be used in the control of our hydraulic human-like robot. In this article, firstly a new objective function for evaluating the performance of IT2FLC is proposed. Then IDSO is used to get the global optimal solution. The advantage of selecting DSO for this optimization is that DSO 14 is featured with fast convergence speed and excellent ability of escaping from local optimal solution. IDSO is expected to get better results compared with other meta-heuristic methods, because DSO has got the excellent performance in benchmark test.
The remainder of this article is organized as follows. The second section presents a brief overview about the IT2FLCs optimization using meta-heuristic algorithm. The third section introduces the framework of the IT2FLCs model and benchmark plants. The fourth section explains how DSO works and the proposed improvement for DSO. The fifth section shows the simulation results and comparison with other methods. The last section gives the conclusions and further research.
Related work
In the last few years, many researchers have proposed their meta-heuristic-based IT2FLC optimization method to solve different practical problems. In this section, a brief review of IT2FLC is introduced, and this review also demonstrates the feasibility of designing the IT2FLCs with meta-heuristic method in hydraulic system.
Sun et al. 13 proposed a ribonucleic acid (RNA) genetic algorithm (RNA-GA). Firstly, RNA-GA was tested with five nonlinear benchmark functions. Then, to further investigate the performance of RNA-GA-based FLC (RNA-GA-FLC), a plant with the double inverted pendulum system control was taken for performance test. Results showed that RNA-GA performs better than others. Castillo and Cervantes 15 used GA to design an IT2FLC which was applied in the control of a plane. Fitness function used in this optimization was the mean absolute error between the target and simulation output. Simulation results showed that GA-based T2FLC can get better performance compared with other conventional controllers. Melendez et al. 16 proposed an IT2FLC by using GA for control of wheeled robot. In this study, configuration of IT2FLC and management of mobile power are optimized by GA. To improve the tracing ability of IT2FLC, a new topology which consists of an artificial neural network was applied to this FLC optimization. As a result, feasibility of this method was proved by the simulation results. Hamza et al. 17 designed an IT2FLC with cascade form. The configuration parameters of IT2FLC were optimized by using GA and particle swarm optimization (PSO). Simulation results showed that the proposed IT2FLC performed well in uncertainly rotary inverted pendulum system. And GA outperformed PSO in steady-state error test, while PSO outperformed GA in other evaluation indexes. Martínez-Soto et al. 18,19 proposed a hybrid PSO and GA method to design IT2FLC and type-1 FLC (T1FLC). To prove the feasibility of this method, three different plants including benchmarks of two linear system and trajectory tracking control for wheeled robot were used for test. Simulation results showed that hybrid PSO-GA performed better than other algorithms, and IT2FLC performed better than T1FLC under disturbances. Yesil 20 proposed a design method based on Big Bang–Big Crunch (BB-BC) optimization for IT2FLC-based PID (IT2FLC-PID) load frequency control. To test IT2FLC-PID’s performance, IT2FLC-PID was compared with T1FLC-based PID and conventional PID. BB-BC was also used for the other two PID controller for fair comparison. Results showed that IT2FLC-PID outperforms others. Castillo et al. 21 proposed artificial bee colony optimization (ACO)-based method for optimizing IT2FLC and T1FLC, which were used in trajectory tracking control of wheeled robot. Fitness function used in this article was the mean square error (MSE) between target and actual signal. From the result, Castillo et al. concluded that the ACO-based controller performed better than others in trajectory tracking control and IT2FLC performed better than T1FLC. Amador-Angulo and Castillo 22 and Amador and Castillo 23 used ACO to optimize T1FLC and IT2FLC for the control of a water tank. Parameters for the membership function (MF) and the topology of the FLCs were optimized by ACO, and fitness function used for this optimization was average error. Results showed that IT2FLC performed better than T1FLC.
Although many research studies devote themselves to meta-heuristic algorithm-based IT2FLC optimization methods, there are still a lot of problems in current research studies. Most research studies focus on the curve tracing ability of IT2FLCs, regardless of the steady-state error and stable time. Pulido et al. 24 have put forward their opinion in literature that the step performance such as overshoot and stabling time should also be considered in IT2FLC optimization. Because if the IT2FLC is optimized according to the curve tracing performance only, the stable performance may be poor, and even it may cause unexpected oscillation. So using these optimization methods may cause serious problems in practical engineering system. What’s more, most research studies get optimal results from limited ranges which increase the difficulty of finding feasible results and limit the practicality of IT2FLC in the control of our hydraulic human-like robot. Besides, the accuracy of simulation results also needs to be improved.
Based on the above reasons, to improve the performance of meta-heuristic-based IT2FLC, several improvements are considered. Firstly, a new IT2FLC with simplified topology is proposed, and this model of IT2FLC needs fewer parameter constraints. Besides, a new fitness function is designed, and this fitness function concerns both the performance of step response and frequency response so that it benefits to the optimization of IT2FLC. What’s more, several improvements are proposed for DSO and this improved DSO is applied to optimize the IT2FLC. At last, comparison between IDSO-based IT2FLC with other algorithm-based IT2FLC proves its superiority.
Problem statements and design of fuzzy logic control
Description of nonlinear hydraulic plants and other test plants
The main goal of this article is to design an IT2FLC for humanoid robot hydraulic system by using the IDSO. To demonstrate that IDSO-based IT2FLC design method will get good performance in hydraulic system of our human-like robot and it can also be applied to other situations, three benchmark plants have been set with one for nonlinear hydraulic system benchmark plant, another for PD system, and the last for PI system.
Hydraulic system shown in Figure 1 is a typical nonlinear system which comprises a linear displacement sensor, an industry personal computer, an output module, a cylinder, a servo valve, and a load force. This system is widely used in our human-like robot, for example, the implement of pitch and roll freedom in ankle joint in Figure 2, the pitch freedom in knee joint in Figure 3, the yaw freedom in hip joint as shown in Figure 4, and the assembled robot is shown in Figure 5.

Hydraulic system. LDS: linear displacement sensor; IPC: industry personal computer.

Ankle joint.

Knee joint.

Hip joint.

Design of robot.
Simplified transfer function is necessary for system control
25,26
and equation (1) shows the simplified transfer function of hydraulic cylinder, where Y denotes the displacement of cylinder, The relationship between flow rate and input current. Parameters of hydraulic cylinder.



To further test the performance of IDSO-based IT2FLC, IDSO-based IT2FLC is also tested with other two plants including Plant-PD and Plant-PI. Plant-PD is defined by the following second-order transfer function

Plant-PI is defined by the following first-order transfer function

This plant is a first-order inertia element, where T denotes time constant. These two plants are the typical plants for PID control tuning. Through the analysis of IT2FLC’s application in these two plants, the universality of IDSO-based IT2FLC can be proved.
Design of IT2FLC
In this section, the IT2FLC used in this article is introduced, and the parameter of this IT2FLC will be optimized by DSO, GA, differential evolution (DE), and so on. For this IT2FLC, two inputs are used: (a) error and (b) error change, each input consists of six MFs which are shown in Figure 7. Three groups for each consist of two MFs are designed for inputs, where N represents negative using a Sigmoid MF, Z represents zero using a triangular MF, and P represents output using a Sigmoid MF. What’s more, several constant values are defined for output MFs of this system. The fuzzy rules are shown in Table 2, with all of them defined in the IF-THEN format.

MFs of interval type-2 fuzzy systems. MF: membership function.
Fuzzy rules of FLC.

FLC: fuzzy logic controller.
Nie and Tan 27 have put forward their idea that IT2FLC was proved to be equivalent to nonlinear PD controller, while recursive IT2FLC was proved to be equivalent to nonlinear PI one, so they can also be called IT2FL-PI-C and IT2FL-PD-C. The basic structure of IT2FL-PI-C and IT2FL-PD-C close-loop systems is shown in Figures 8 and 9. During the optimization, the type of IT2FLC should also be concerned.

IT2FL-PD-C close-loop system. IT2FL: interval type-2 fuzzy logic.

IT2FL-PI-C close-loop system. IT2FL: interval type-2 fuzzy logic.
The model of IT2FLC optimization
The main objective of this article is to reach better control performance by using IDSO-based IT2FLC, so the designing of fitness function would be an important task. As shown in equation (6), a fitness function which considers dynamic response performance and steady-state response performance is proposed for this optimization. This fitness function concerns both of these performance in the control of hydraulic robot system, and this will benefit the IT2FLC optimization. This fitness function is calculated by the weight sum of integrated time and absolute (ITAE) and integrated square error (ISE). The reasons for selecting these two indexes are that ITAE is sensitive to stability of system and ISE can directly represent the trace ability. Besides, similar indexes are commonly used in IT2FLC designing.
28,29
The value of ITAE
30
can be calculated with equation (7) and the value of ISE
31
can be calculated with equation (8), where t denotes the running time and



As shown in Figure 2, the MFs used in these optimizations are described in equations (11
) to (16). The






There are also two constraints that need to be satisfied in above functions

The configuration parameters of optimization are shown in Table 3. To Benefit from the simplified IT2FLC topology, similar configuration parameters can be used in this optimization. And for most parameters, the same searching ranges are applied. As shown in Table 3, the parameters of input MFs are associated with each other. And the parameters of output MFs are set according to the actual output limitation, and it can be set with bigger value to enlarge the searching region. The gain is the most important parameter of IT2FLC optimization, it plays the role of scaling the actual e and ec to make sure the limitation of input MFs suitable. And it can be searching in the range [0, 100] in most cases. To determine the weights of ISE and ITAE, firstly an estimation value of ISE and ITAE can be achieved by optimizing the IT2FLC with fitness function of ISE and ITAE only. In most cases, ISE is much smaller than ITAE, so the weight of ITAE can be set to 1. Then the weight of ISE can be set to 10, 100,…, according to the ratio between ISE and ITAE.
Configuration parameters of optimization.

IT2FLC: interval type-2 fuzzy logic controller.
The meaning of node numbers.

Proposed IDSO for IT2FLC optimization
Basic DSO
DSO is a new meta-heuristics method proposed by de Melo and Banzhaf 14 and de Melo, 32 which is inspired by the control of drone squadron and featured with self-adaptive ability.
The DSO algorithm is composed of several teams with the same number of drones, each team moves under the control of its firmware which is updated during the searching process. The firmware of each team is generated by using a binary tree structure which contains operation nodes and terminal nodes, similar to related works. 33,34 As shown in Figure 10, each node is randomly generated except for several starting nodes. The 1s on the left boxes of the nodes mean that these nodes are operation nodes while the 2s denote terminal nodes, and the numbers on the right boxes denote different operations and matrixes. The meaning of the node numbers in Figure 10 is shown in Table 4.

Binary tree structure of drone firmware.
In DSO, the drones must be allowed to move only inside a space which is set up before optimization. Therefore, if a drone moves outside the feasible bounds, three techniques are available: The drone stops exactly at the bound. The drone stops at a new random position inside the feasible space. The drone stops at LB + remainder or UB − remainder, where remainder denotes the excess value of feasible space, LB denotes the lower bound of searching space while UB denotes the upper.
At the same time, violation of each team is calculated as

After previous work, a feasible position of a drone is generated, and a recombination of the new drone position and best position found so far may be done according to the one of the following three rules: No recombination. Uniform crossover. Exponential recombination.
The firmware of each squadron updates every certain number of iterations. The parameter TeamQuality, which is calculated by equation (18), is critical in these update processes. Squadron with more TeamQuality will update its firmware according to the firmware with the least TeamQuality

where Rankteam denotes the average rank of the fitness value of ith (i = 1, 2,…) drone compared with other teams.
Different from other algorithms, DSO employs a special strategy to avoid trapping in local optimal solution. When the global optimal doesn’t update after a certain number of iterations, IDSO will accept worse results in limited probability.
Improvement of DSO
To make DSO algorithm more suitable for the optimization of IT2FLC, several improvements are proposed in this article:
To increase the convergence speed of DSO, the author suggested that at the beginning of calculation, a reference firmware can be set for one squadron, which could be DE/rand/1 in most cases. The mutation strategy often lead to local optimal especially when the number of individual is few. Based on this fact, a new reference firmware as shown in equation (19) is proposed, which was inspired by whale swarm algorithm with iteration counter (WSA-IC) proposed by Zeng et al.,
35
where U(0, 1) denotes a matrix of uniform distribution with the range of 0–1 and 
During the research, it can be noticed that the drone squadron with reference firmware is responsible for major search tasks, which serves as leading aircraft with the main task of “attacking,” while other drone squadrons serve as wingman with the main task of “scout.” Most evolution occurs in the group with reference firmware and most calculation in other groups is of little value. To improve the efficiency of DSO, the proportion of each groups should be optimized. Different from original research, the drones are divided into two groups of the same drones with one for leading aircrafts and the other for wingmen. Each group consists of 60 or more drones, for the reason that more drones can carry more information. The drone squadron of wingmen will update its firmware each iteration, so the calculation of TeamQuality can be discarded.
To jump from local optimal solution, a new restart mechanism is applied. After continuous a certain number of stagnations, all individuals are nearly same, which means continuous searching is of little value. So in this restart mechanism, all drones will be reinitialized when the global optimal doesn’t update for a certain number of iterations.
The framework of improved DSO is shown in Figure 11.

The pseudo code of improved DSO. DSO: drone squadron optimization.
Simulation results and discussions
This section is organized as follows: firstly, the simulation results for Plant-PI and Plant-PD using IT2FLC-PI/PD controller under optimization of bio-inspired algorithm are presented, then the simulation results and analysis of the nonlinear system Plant-nonlinear are also shown. The main objective of this article is to obtain the best fitness value for each plant. After the global optimal is obtained, this result will be tested by different inputs, which can help us further investigate the performance of the IDSO-based IT2FLC. Besides, because IDSO and DSO cost more time in firmware and position generation of the next iteration, it’s important to notice the time cost of this optimization which will help us demonstrate the efficiency of IDSO. Then discussion of the results and explanation of why IDSO outperforms others in this optimization are presented.
In this section, simulation results of the IT2FLC proposed previously are presented. The comparison of GA, 36 PSO, 37 DE, 38 ACO, 39 and BB-BC 40 is shown in the results summary, because relative research studies have been done by using these algorithms. All of the algorithms to optimize IT2FLC are all designed by us and they are all implemented with C++ programming language by Microsoft Visual Studio 2017 and executed on the PC with 3.4 GHz Intel Xeon E3-1230-V5 processor, 16 GB RAM, and 64-bit Microsoft Windows 10 operating system.
Other algorithms used to optimize IT2FLC in this experiment are configured as follows. We do not adjust parameters of these heuristic algorithms but use the default parameters according to the suggestion of literatures. To guarantee the fairness of comparison, the number of population size and iteration are the same for each plant in this simulation. IDSO: Team: 2, drone: 60, iterations: 15,000, C1: 0.5, C2: 0.4, C3: 0.9, CR: U(0.4, 0.9), stagnation: 10, continuous stagnation: 20. DSO: Team: 4, drone: 30, iterations: 15,000, C1: 0.5, C2: 0.4, C3: 0.9, CR: U(0.4, 0.9), stagnation: 10, continuous stagnation: none. ACO
39
: Individuals: 120, iterations: 15,000, food number: individuals/2, limit: 20. BB-BC: Individuals: 120, iterations: 15,000. DE: Individuals: 120, iterations: 15,000, F: 0.5, CR: 0.9. GA: Individuals: 120, iterations: 15,000, CP: 0.95, MP: 0.05. PSO: Individuals: 120, iterations: 15,000, C1: 2.05, C2: 2.05, K: 0.729844.
Simulation results
IT2FLC-PI optimization results of IDSO for Plant-PI
In this section, the IT2FL-PI-C simulation results for Plant-PI which are solved by different algorithms are shown. In this plant, the input test signal shown in equation (20) is applied in test

where X denotes the desired output and t represents the running time.
Results and analysis of fitness value for Plant-PI
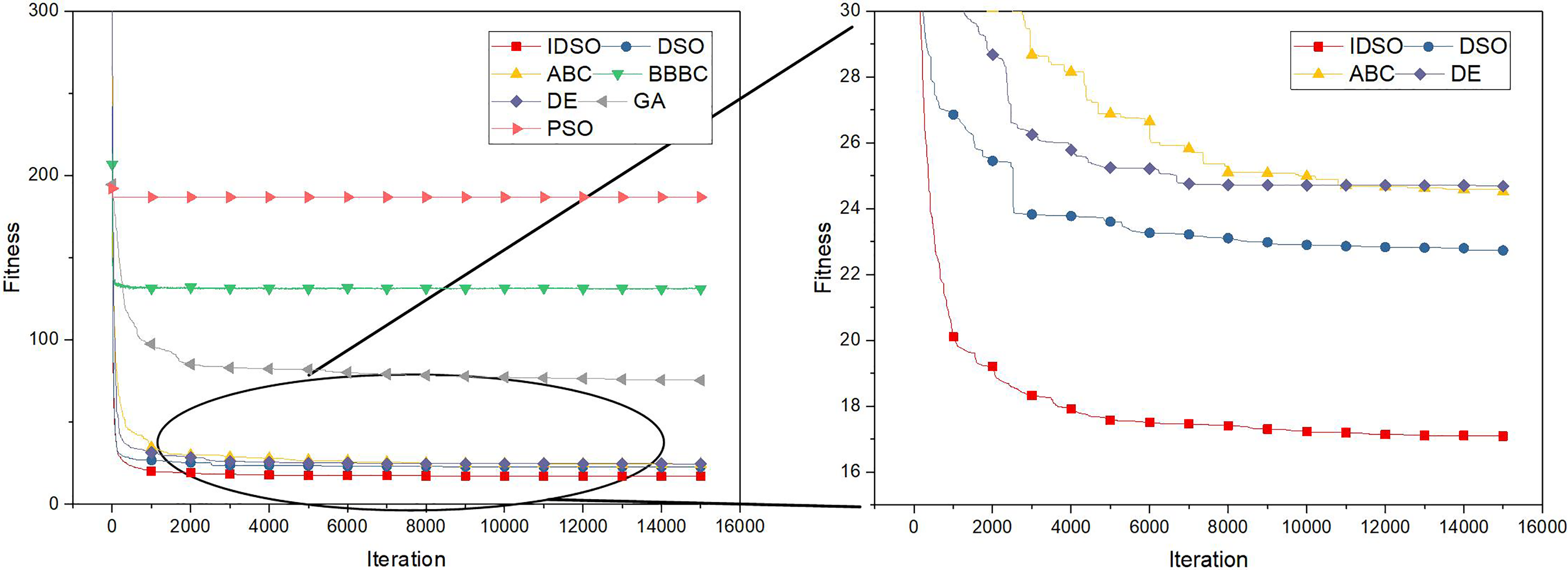
Table 5 contains the average execution time and fitness value after 20 independent runs for each algorithm. The first row shows that using IDSO can get best result within the same iteration. The convergence curves by different algorithms of Plant-PI are shown in Figure 12. As shown in Figure 12, IDSO, DSO, ABC, and DE converge faster in early iterations, and IDSO converges the fastest. In the later iterations, the case of IDSO finally obtains a best fitness value. The box plot of fitness values of optima found per run over 20 independent runs is shown in Figure 13. It can be seen from Figure 8 that the dispersion degree of mean fitness values of optima found by IDSO is relatively smaller compared with other algorithms. Therefore, it also can be inferred that DSO can also reach better performance compared with other algorithms. What’s more, in this optimization, the time cost of BB-BC is the biggest while the DE is the smallest, and the time cost of IDSO is between them.

Convergence curve by different algorithms of Plant-PI. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.

Box charts by different algorithms of Plant-PI. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.
Results of the IT2FLC obtained by different algorithms for Plant-PI.

IT2FLC: interval type-2 fuzzy logic controller; DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BB-BC: Big Bang–Big Crunch.
Note. The bold value means the best value among these calculation results.
Results and analysis of simulation for Plant-PI
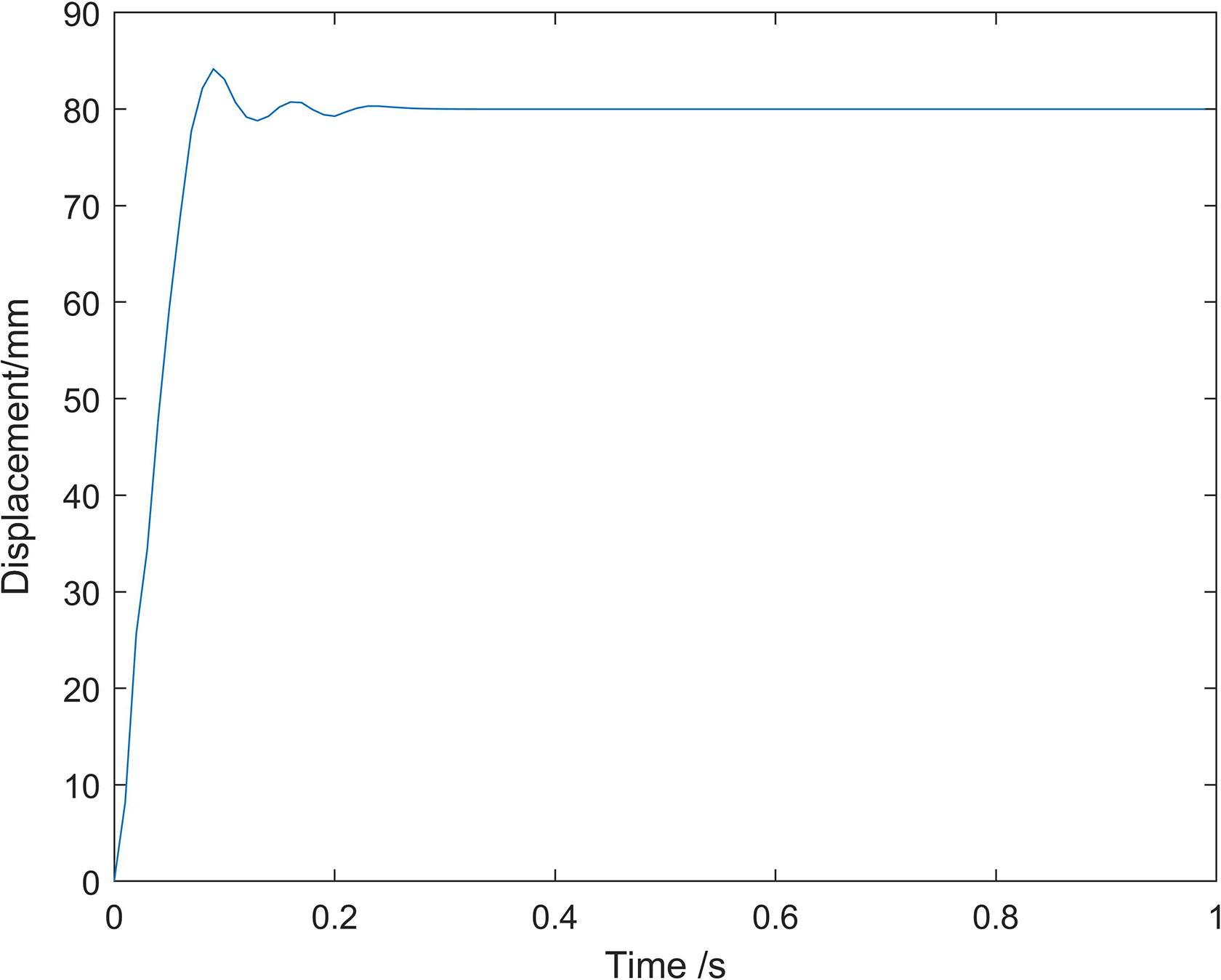
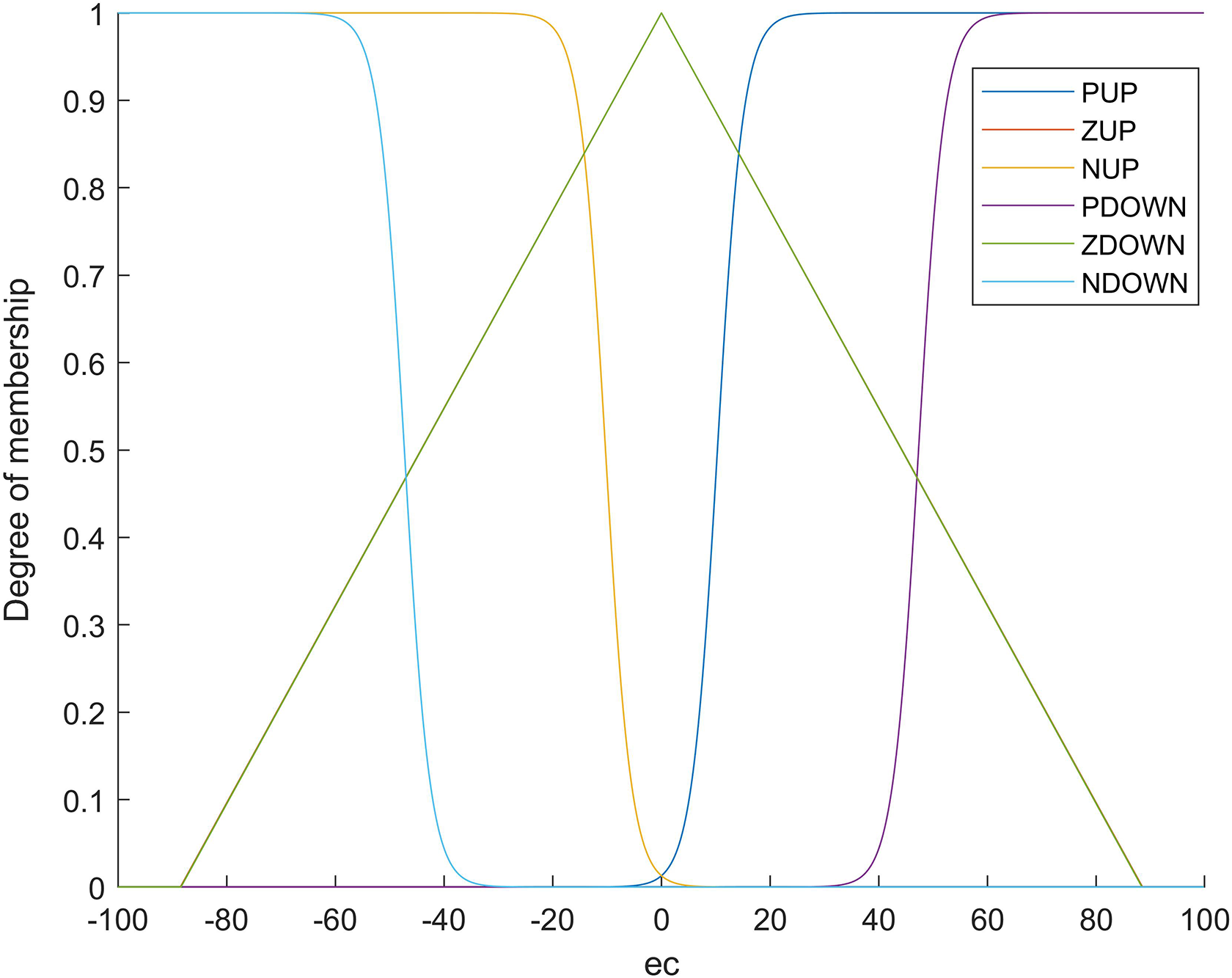
The step response of Plant-PI after optimization is shown in Figure 14 and the frequency response is shown in Figure 15. Figure 16 contains the test curve and response of the system. It can be seen from Figure 14 that simulation curve reaches the target with a high speed, little overshoot, and little settling time. Figures 14 and 15 show the reference data and output data of step and frequency response. Figure 16 is the test curve of this optimization. It is worth noticing that the output data followed the reference data without time delay at most time. But at the beginning of each case, the error between output data and reference data is relatively big. This is because that although IT2FL-PI-C can be treated as PI controller, there are certainly differences between them. IT2FL-PI-C uses accumulator, which can’t make quick response when it is settled to 0. To summarize these three figures, the system can reach relatively good performance after optimization. What’s more, Figures 17 and 18 show the MFs of e and ec after optimization.
Step response of Plant-PI.

Frequency response of Plant-PI.
Test curve and response of Plant-PI.

MFs of e for Plant-PI. MF: membership function.

MFs of ec for Plant-PI. MF: membership function.
IT2FLC optimization results of IDSO for Plant-PD
In this section, the IT2FL-PD-C simulation results for Plant-PD which are reached by different algorithms are shown. In this plant, the input test signal shown in equation (21) is tested

where X denotes the desired output and t represents the running time.
Results and analysis of fitness value for Plant-PD
Table 6 contains the average execution time and fitness value after 20 independent runs for each algorithm. The first row shows that IDSO can get the best result within the same iteration.
Results of the IT2FLC obtained by different algorithms for Plant-PD.

IT2FLC: interval type-2 fuzzy logic controller; DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BB-BC: Big Bang–Big Crunch.
Note. The bold value means the best value among these calculation results.
The convergence curves by different algorithms of Plant-PD are shown in Figure 19. As can be seen from Figure 19, IDSO, DSO, and DE converge faster in early iterations. However, in the later iterations, the case of IDSO finally obtains a best fitness value. What’s more, although time cost of IDSO is the biggest, it could be acceptable because the result is better than others. The box plot of fitness values of optima found per run over 20 independent runs is shown in Figure 20. It can be seen from Figure 20 that the dispersion degree of mean fitness values found by DSO is the smallest among all these algorithms, and its mean value is not the best. Based on this fact, it can be inferred that DSO may be trapped in a local optimum in most simulations. Besides, GA gets the fitness value within the smallest time while DSO within the biggest, and the running time of IDSO is between them.
Convergence curves by different algorithms of Plant-PD. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.
Box charts by different algorithms of Plant-PD. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.
Results and analysis of simulation for Plant-PD
The step response of Plant-PD after optimization is shown in Figure 21. The frequency response is shown in Figure 22. Figure 23 contains the test curve and response of the system. It can be seen from Figure 21 that simulation curve reaches the target with a high speed, and without any overshoot. Figures 22 and 23 show the reference data and output data of frequency response and test. It can be noticed that the output data followed the reference data without time delay, but there is little vibration between them. One reason that can explain it is that Plant-PD is a two-order system without any damping, IT2FL-PD-C may not be the best controller for this plant. In short, it can be seen from figures mentioned above that the system can reach relatively good performance after optimization. In addition, Figures 24 and 25 show the MFs of e and ec for Plant-PD after optimization.

Step response of Plant-PD.

Frequency response of Plant-PD.

Test curve and response of Plant-PD.

MFs of e for Plant-PD. MF: membership function.

MFs of ec for Plant-PD. MF: membership function.
IT2FLC optimization results of IDSO for Plant-nonlinear
In this section, the IT2FLC-PI control simulation results for Plant-nonlinear which are reached by different algorithms are shown. In this plant, the following input test signal is applied in performance test

where X denotes the desired displacement of hydraulic cylinder and t represents the running time.
Results and analysis of fitness value for Plant-nonlinear
Table 7 contains the average execution time and fitness value after 20 independent runs for each algorithm. The first row shows that using IDSO can get best result within the same iteration.
Results of the IT2FLC obtained by different algorithms for Plant-nonlinear.

IT2FLC: interval type-2 fuzzy logic controller; DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BB-BC: Big Bang–Big Crunch.
Note. The bold value means the best value among these calculation results.
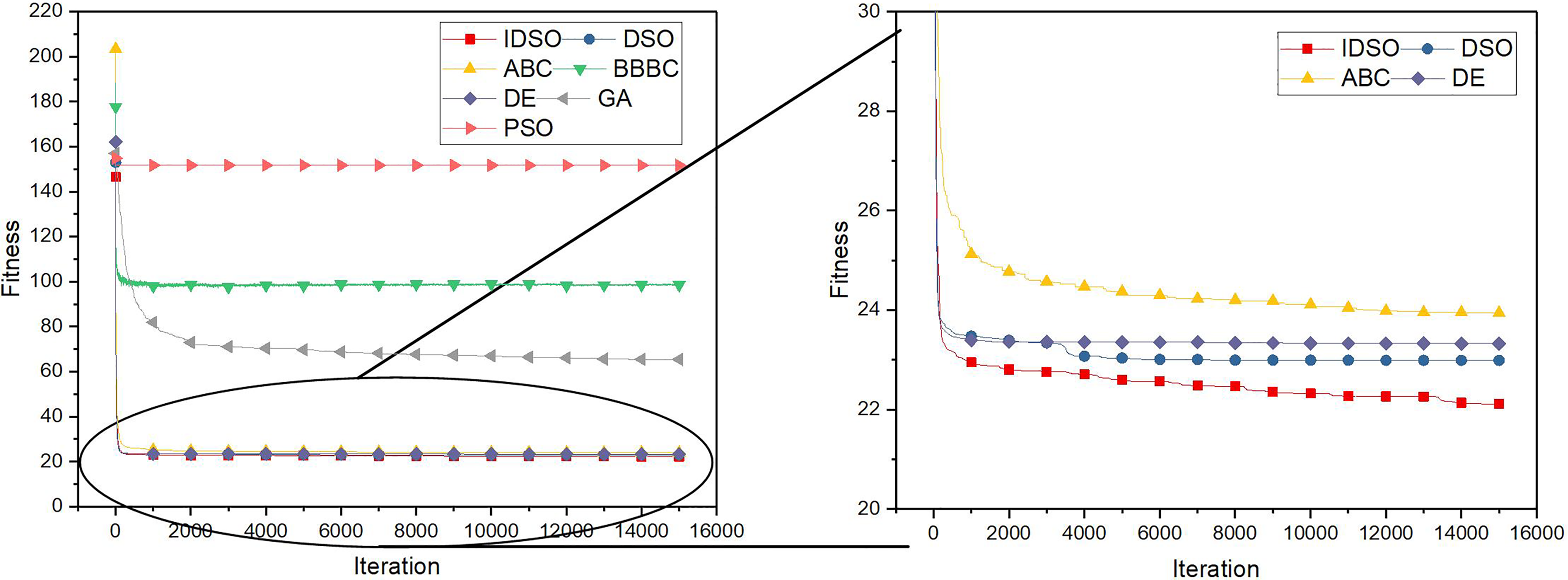
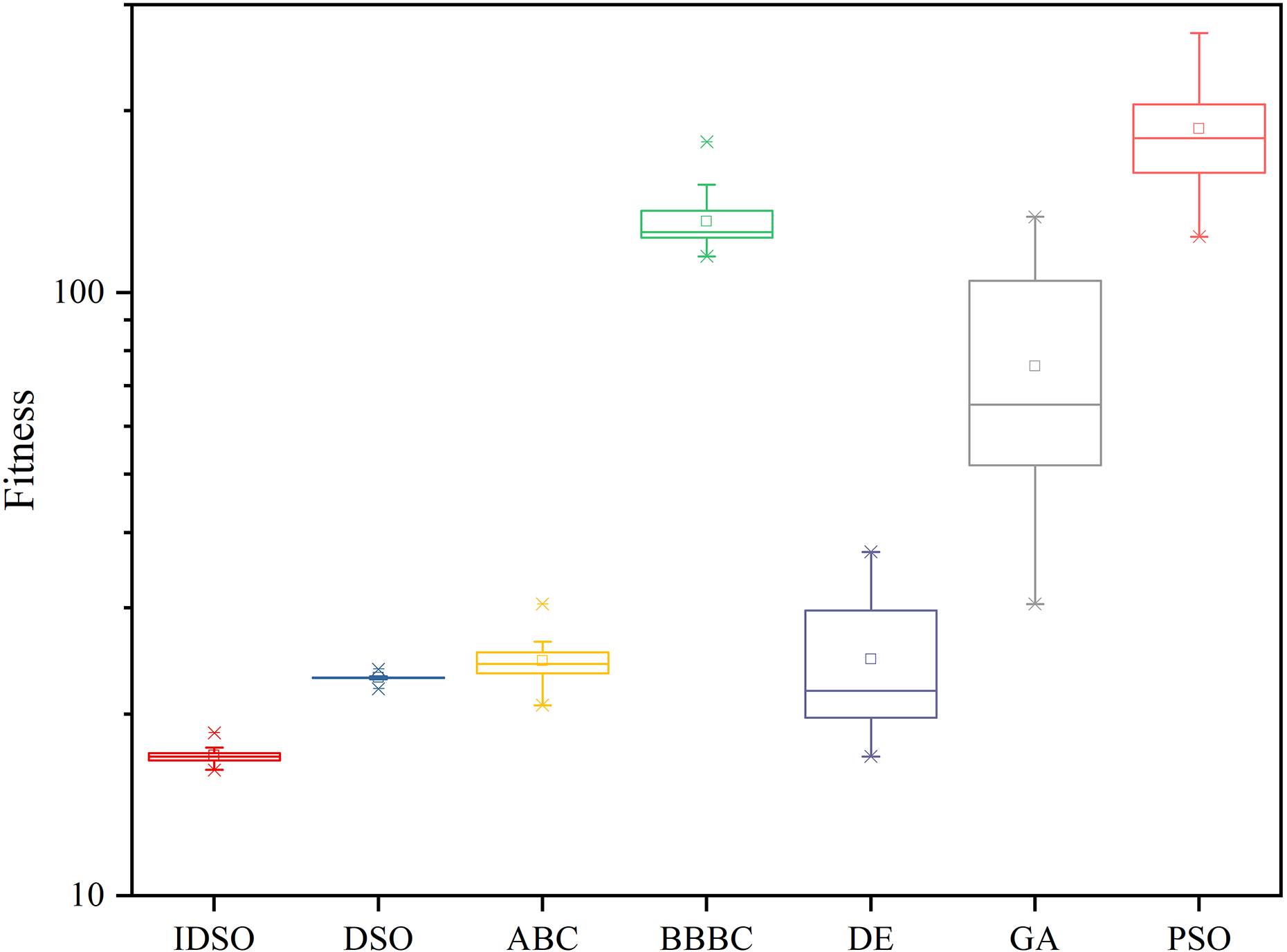
The convergence curves by different algorithms of Plant-nonlinear are shown in Figure 26. As can be seen from Figure 26, the curve of IDSO converges faster than other algorithms and finally obtains a best fitness value. What’s more, although time cost of IDSO is the biggest, it could be acceptable because it gets the best fitness value. The box plot of fitness values of optima found per run over 20 independent runs is shown in Figure 27. It can be seen from Figure 27 that the dispersion degree of mean fitness values of optima found by IDSO is relatively smaller with respect to other algorithms compared. What’s more, the time cost of IDSO is the biggest and GA gets the fitness value in the smallest time.
Convergence curves by different algorithms of Plant-nonlinear. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.

Box charts by different algorithms of Plant-nonlinear. DSO: drone squadron optimization; IDSO: improved drone squadron optimization; ABC: artificial bee colony; PSO: particle swarm optimization; DE: differential evolution; GA: genetic algorithm; BBBC: Big Bang–Big Crunch.
Results and analysis of simulation for Plant-nonlinear
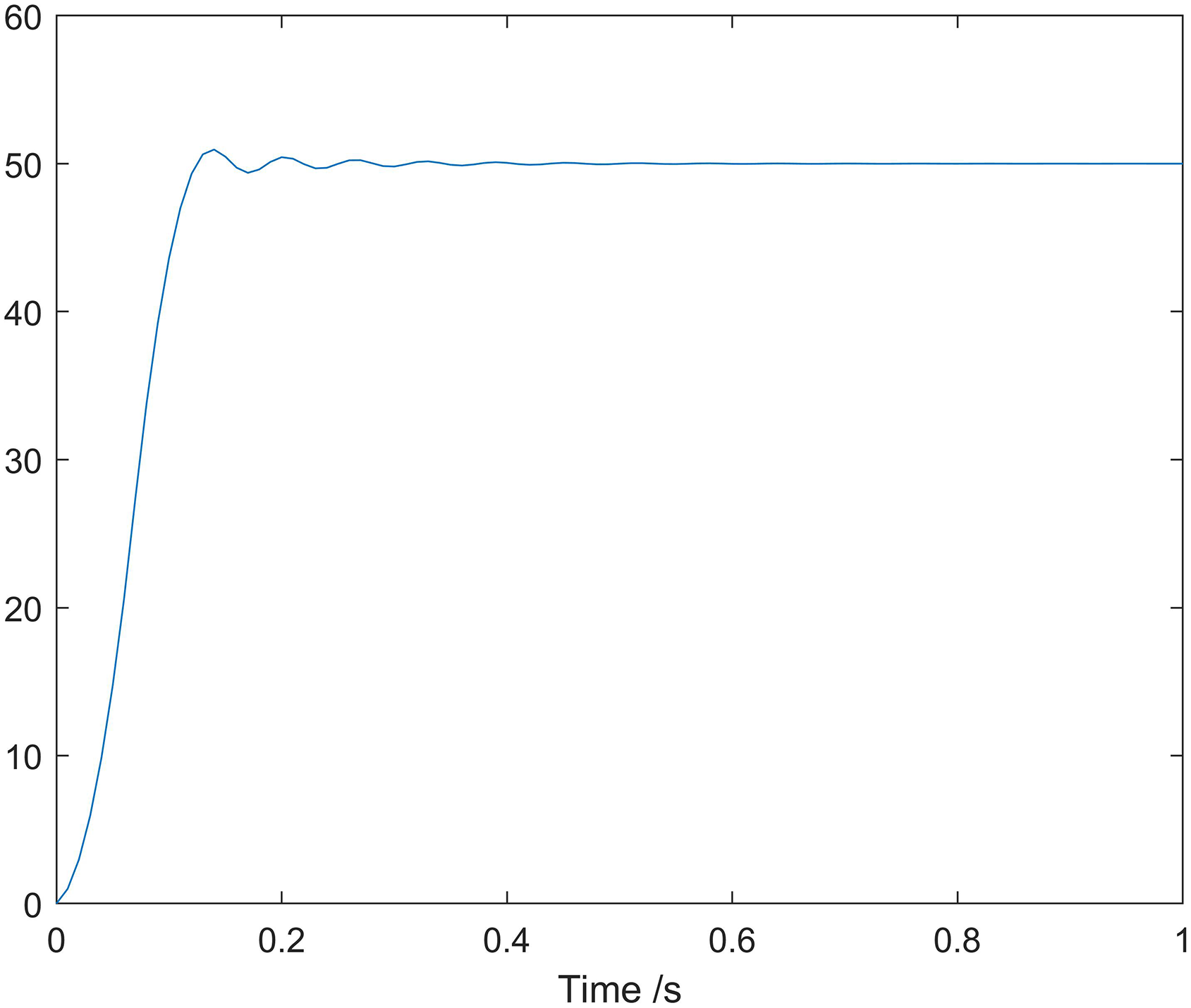
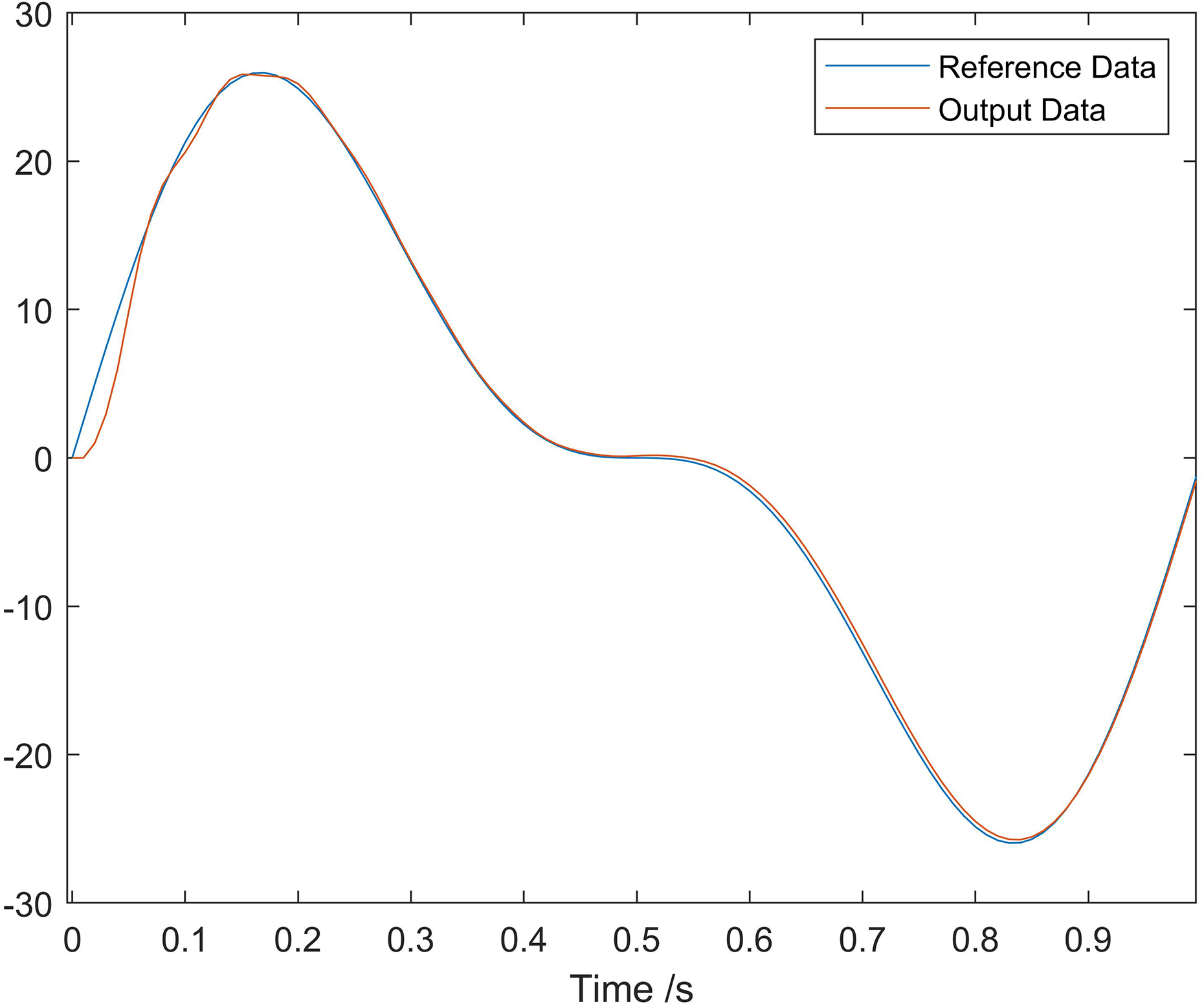
The step response of Plant-nonlinear after optimization is shown in Figure 28. The frequency response is shown in Figure 29. Figure 30 contains the test curve and response of the system. Similar to Plant-PI, Figure 28 shows that simulation curve reaches the step target with high speed, little overshoot, and little stable time. Figures 29 and 30 show the reference data and output data of frequency response and test, and it can be noticed that the output data follow the reference data without time delay. Similar phenomenon is also found at the beginning of other cases, and this can be also explained by the characteristic of IT2FL-PI-C. To summarize, we can conclude that the system can reach relatively good performance after optimization. What’s more, Figures 31 and 32 show the membership of e and ec functions after optimization.
Step response of Plant-nonlinear.

Frequency response of Plant-nonlinear.

Test curve and response of Plant-nonlinear.

MFs of e for Plant-nonlinear. MF: membership function.
MFs of ec for Plant-nonlinear. MF: membership function.
Conclusions and future research
In this article, IDSO is applied to designing an IT2FLC for control of different systems, with hydraulic cylinder included. And simulation results show that this IDSO-based IT2FLC is suitable for these systems. Comparing the results between IDSO and other algorithms, IDSO can obtain better results with better stability and precision, especially in hydraulic cylinder system. Based on this fact, we can expect that IDSO could outperform conventional meta-heuristic algorithms in other IT2FLC-based control problems.
The main contributions of this article can be summarized into two aspects as follows: The IDSO-based IT2FLC optimization method proposed in this article performs well when it is applied to inertia system, two-order system, and hydraulic-like system. This optimization method concerns both of step response and frequency response. The improved DSO algorithm outperforms other algorithms in IT2FLC optimization problems, and it’s featured with fast convergence speed and the ability of reaching relatively better results.
For IDSO can reach as better global optimal as possible in the IT2FLC, it can significantly increase the success rate and efficiency. Limitations of IDSO for IT2FLC optimization also exist, and one of them is the constant ratios of leading aircrafts/wingmen, which may reduce the efficiency of calculation. What’s more, the restarting strategy needs further improvement. Stagnation control strategy used in this algorithm may discard some useful information after the process of jumping out of local best solution, besides, it may also lead to the reducing of the optimization precision.
In the future, we will further improve DSO algorithm to increase the IT2FLC’s performance in nonsymmetrical hydraulic servo system and some other systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation for Distinguished Young Scholars of China under grant no. 51825502, National Natural Science Foundation of China (NSFC) under grant no. 51721092, Natural Science Foundation of Hubei Province under grant no. 2018CFA078, and the Program for HUST Academic Frontier Youth Team under grant no. 2017QYTD04.