Fixed-time synchronization problem for a class of leader–follower multi-agent systems with second-order nonlinearity is studied in this article. A new fixed-time synchronization control algorithm is developed by effectively combining homogeneous system theory, Lyapunov stability theory, and fixed-time/finite-time control technology. The leader–follower multi-agent system is considered to achieve fixed-time synchronization control. Finally, numerical simulations including coordination control multiple pendulum robot systems and electric power networks are carried out to verify the control performance of the control strategy.
Traditional robot control relies on a precise model established beforehand. The inverse Jacobian matrix (for redundant robots, the generalized inverse matrix) is used as a tool to solve the inverse kinematics solution. For robots with many degrees of freedom and complex structures, the computational overhead of this method will become very large. Especially when the individual joint actuators of the robot fail in operation, the control program of the original precise model may make the motion of the manipulator out of control, resulting in unpredictable consequences. In order to solve the limitations of traditional control methods for robots, the joint actuators of manipulators are studied by using multi-agent system (MAS).
In recent years, with applications of MAS, such as cluster control,1 formation control,2 coordinated attack of multiple missiles,3 and current sharing control,4 the problem of consistency or synchronization has been widely concerned. The global output feedback stabilization problem by using aperiodic sampled-data control was investigated in work.5 The work6 investigated the distributed synchronization problem of autonomous underwater vehicles by developing a novel synchronization protocol with memorized controller. Based on the neural network, a synchronized computed torque controller with uncertainties compensation was developed for the three degree-of-freedom planar parallel manipulators.7 The purpose of synchronization control is to make all agents converge to the same state value, that is, the final consistent state.8 Clearly, the consistency state and the convergence speed are the key to study the consistency problem.
Generally, MAS can be divided into leaderless MAS and leader-led master–slave MAS. For MAS without leadership, the ultimate consistent state usually depends on the original state, such as average consistency.8 For leader–follower MAS with a leader, the ultimate consistent state is the leader’s state, which can be a virtual quantity and a reference signal indicating the expectation. The leader is independent of the followers, but has an impact on the behavior of the followers. Based on this, it is possible to control a set of agents simply by controlling the leader. Based on this, it is very meaningful and interesting to study the consistency tracking problem of leader–follower MAS. If leaders are fixed, such as food sources, then some tracking control algorithms are put forward the consistency of different MAS.9,10 When leaders are dynamic, the corresponding consistency control algorithms are also considered, such as for first-order MAS11 and second-order MAS.12,13 An impulsive consensus algorithm was proposed for second-order continuous-time multi-agent networks with switching topology.14 The delayed impulsive controllers were proposed to enable the agents in a class of second-order MASs with the relative full-state and partial-state sampled-data measurements among neighboring agents.15 For Markovian jump memristive neural networks, the dissipative synchronization control problem was addressed.16
Convergence speed is another important subject in consistency research. However, most existing consistency/synchronization algorithms for MAS are only asymptotically stable. Compared with most asymptotically stable control algorithms, closed-loop systems with finite-time convergence have better dynamic and steady-state performance, that is, faster convergence speed and better anti-interference performance.17–24 Based on this, the problem of finite-time consensus/synchronization has received wide attention. For first-order MAS, several finite-time consensus algorithms have been proposed in relevant literatures.25,26 For second-order systems, some finite-time consensus algorithms19,27,28 are also designed. The synchronization time of the finite-time algorithms usually depends on the initial state about MAS. In order to eliminate these limits of finite-time algorithm, the notion of fixed-time stability29 is further proposed, and the time when the system converges to the equilibrium point under unknown initial conditions can be determined in advance. Under the fixed-time control frame, some results have been achieved on fixed-time synchronization control, such as for first-order MAS,30 for second-order MAS,31,32 and for higher-order MAS.33
Taking into account the advantages of the above fixed-time control techniques, this article aims to achieve the goal of fixed-time synchronization control for a class of MASs with second-order nonlinearity. Inspired by literature,34,35 this article uses the idea of homogeneity to design a fixed-time synchronization control scheme such that all agents achieve synchronization within a fixed time independent of original conditions, which greatly simplifies the design of the controller. Specifically, the entire controller design and stability analysis include global exponential stability, global fixed-time attraction, and local finite-time stability. The corresponding stability analysis is given to demonstrate the correctness of the proposed method. Finally, several simulation examples of the Pendubot system and electrical power networks are given to verify the effectiveness of the controller.
Introduction to mathematical model
Mathematical model
For example, in literature,12,13 this article considers the synchronization of leader–follower agents systems. Each follower agent can be written as the second-order nonlinear dynamic equation in the form of
where qi and pi represent the position and speed for the ith agent, respectively, ui indicates the control input, and is a nonlinear continuous function describing the automatic mechanics about the ith agent itself. Similarly, the dynamics of leader is described by the following systems
where qd and pd represent the position and speed of leaders, respectively, and is the nonlinear continuous function describing the automatic mechanics of the leader itself.
Graph theory
In the leader–follower MAS (1)–(2), it is assumed that each agent is a node, and the followers’ information exchange uses an undirected graph . is the vertex set. is the set of edges. is the weighted adjacency matrix of graph G. Define a set . If there is communication between agent iand agent j, namely, , there are . If there is no communication between agent i and agent j, there is . In addition, suppose for all , . The neighborhood set of node vi is denoted by . The output degree of node vi is defined as . The degree matrix of the directed graph G is expressed as . The Laplace matrix of the directed graph G is expressed as . In the directed graph G, the path from node vi to node vj is composed of continuous edges starting from vi to vj. If there is a path between any two vertices, the graph G is connected.
Suppose the leader (marked 0) can be described as a top point v0. The link weight between the follower and the leader can be represented by . If the ith follower is connected to the leader, that is, the follower can get the leader’s information directly, then , if not, . Define the matrix .
Assumptions
Assumption 1
For and , there is a known constant such that .
Assumption 2
For the master–slave MAS (1)–(2), the follower graph G is undirected and at least one follower can connect to the leader, that is .
If the system is Lyapunov stable and finite-time convergent, then the origin is a finite-time stable equilibrium. Finite-time convergence implies the existence of a function that is and . If the system is stable in finite-time and convergent in fixed-time, the convergence time is satisfied , then system is called fixed-time stable.
Definition 2 (homogeneity)
Consider system (3), and define the expansion , , .33 Let be a continuous vector-field. The degree of homogeneity of for expansion is , if for any , there exists , , where . If is homogeneous, system is called homogeneous.
Definition 3
Define function , where , , is the standard symbolic function.
Lemma 1
For system (3), if there is a continuous positive definite function , so that , , where , , , , then the system is fixed-time stable and its fixed convergent time is .19 If only , then when , .
where is a continuous homogeneous vector-field, and the homogeneous degree of for expansion is . satisfies for any t. Assume is the asymptotically stable equilibrium point for system . If exists for any t, then is a local finite-time equilibrium point for system (4). Furthermore, if system (4) is both global asymptotically stable and locally finite-time stable, then the system is globally finite-time stable.
Lemma 3
(1) For a connected undirected graph G, the matrix L of its Laplace operator has the following properties: for arbitrary , that means that L is semi-definite.8
(2) If assumption 2 is satisfied, then matrix is symmetric and semi-positive. All of its eigenvalues are real and nonnegative, which can be expressed as . Eigenvalue is single corresponding to the eigenvector . Define as the minimum eigenvalue .
Lemma 4
Let . For any , the following inequalities are true , .37
Fixed-time synchronization control algorithm design
In this section, the fixed-time synchronization problem with the second-order nonlinear MAS (1)–(2) can be solved by the state feedback control under the conditions of assumptions 1 and 2.
Theorem 1
For MAS (1)–(2), in the case of satisfying assumptions 1 and 2, the controller ui is designed as
then all agents can achieve synchronous control within a fixed-time, where , , , , , , , is the minimal eigenvalue of matrix .
Proof
Define
as a tracking error. According to equations (1) and (2), it can be obtained that
According to the tracking error (6), the controller (5) can be rewritten as
Define , , , .
The main proof procedure can be divided into three steps. First, based on Lyapunov stability theory, we can know that the closed-loop system is globally exponentially stable. Then, according to the homogeneous system theory, the closed-loop system is proved to be globally fixed-time attractive. Similarly, based on the homogeneous system theory, we finally give the proof of the local finite-time stability.
Step 1: Global exponential stability
The following Lyapunov function is used
where c is a constant determined below and its derivative with respect to system (7) is
Using lemma 4, we get
Based on the definition of control law (8) and , can be rewritten as . Due to the , , we can get
The last two terms in (12) are then processed. According to lemma 4, since , then
Similarly, because of , we get
This same inequality also applies to and . Therefore, substituting them into formula (12) to get
According to lemma 3, we know that . As a result
According to assumption 1, the following conclusions can be drawn
Substitute the inequality (17) into (16). One gets
Let , . We can get
Furthermore, combined with the definition of V, we know
where .
With the help of the above two inequalities, and based on , we can draw a conclusion
In other words, the closed-loop system (7)–(8) is globally exponentially stable. For any region around the origin, the state converges exponentially to the region, and the convergence time will depend on the initial system states.
Step 2: Global fixed-time attraction
Here, it will be proved that the system states will be drawn to region within a fixed time. In other word, for any , there is a time T1 which is independent of the initial conditions, such that , .
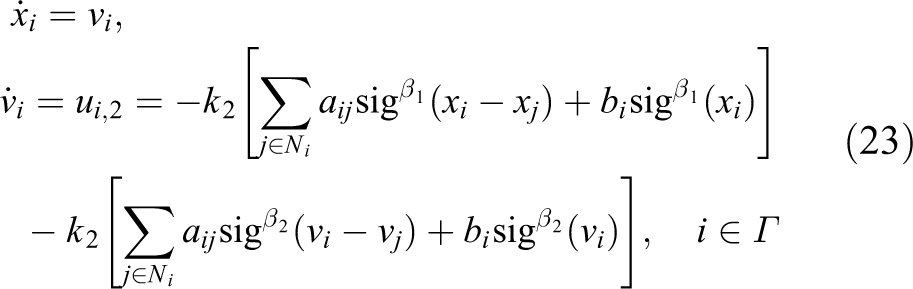
The reconstructed closed-loop system (7)–(8) is written as
where .
First, consider the nominal part of system (22), that is, the system
It is worth noting that , . Based on definition 2, it can be proved that the homogeneous degree of system (23) regarding expansion is , where , . Letting , and according to theorem 2 in literature,33 it can be known that there is a positively definite continuously differentiable function with respect to expansion of homogeneous degree l. And is continuously positive definite, with respect to the same expansion is homogeneous with respect to , where .
Take the derivative of V2 with respect to system (22) is . According to lemma 4.2 in literature,38 a conclusion can be drawn , where . In addition
According to (4) in the literature,34 the homogeneity of is
where . Meanwhile, based on assumption 1, there is
where
The homogeneity of the above term is . Similarly, lemma 4.2 in the literature28 clearly shows that , where . To sum up
According to the definition of (27), let When is big enough, can be small enough for . Since , lemma 1 shows that there is a fixed-time attraction region , so that the system states will converge to this region within a fixed time, and the convergence time is not affected by the initial state of the system.
Step 3: Local finite-time stabilization
Here, it is proved that the system (7)–(8) is locally finite-time stable. There exists a region and time T2 (which depends on the initial conditions) near the zero point so that if , then , . This proof process is mainly based on lemma 2. By substituting the controller (8) into the system (7), the closed-loop system can be reconstructed as
where . First, it is proved that the nominal system of the above system (29)
is asymptotically stable and homogeneous. Then, we will prove that function in system (29) satisfies the condition in lemma 2.
A Lyapunov function is selected for system (30)
By using similar proof to step 1, a conclusion can be drawn
According to LaSalle’s invariant set principle, it is concluded that system (30) is globally asymptotically stable, namely, for any when . In addition, it is worth noting that , . Based on definition 2, it can be proved that the homogeneous degree of system (30) with respect to expansion is , where , . Based on lemma 2, the constructor
According to the definition of and in controller (8), we know that . According to lemma 2, it can be concluded that system (29) is locally finite-time stable.
Thus, through the results of steps 1, 2, and 3, the whole system (7)–(8) is globally fixed-time stable, namely, within a fixed time, , .
End of proof.
Numerical examples and simulations
Example 1: Multiple robot coordination
The effectiveness of the proposed control scheme can be verified by a simulation of multiple Pendubot system. The Pendubot system is a double-joint manipulator that moves on a vertical plane.39 The information interaction among multi-agents is shown in Figure 1.
Communication topology graph among agents.
Then the leader can be given as
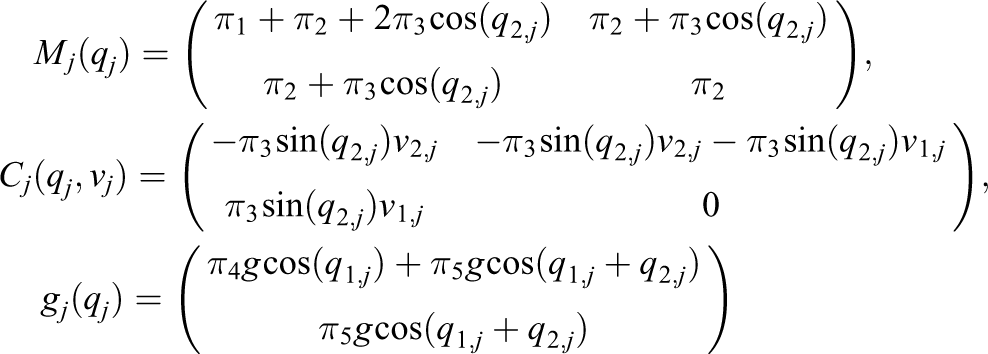
and the follower can be described as
where is the joint variables as shown in Figure 2. is the voltage input of the followers’ actuator, and the specific matrix parameters in the model are given below
where
Response curves of all agents under fixed-time control law.
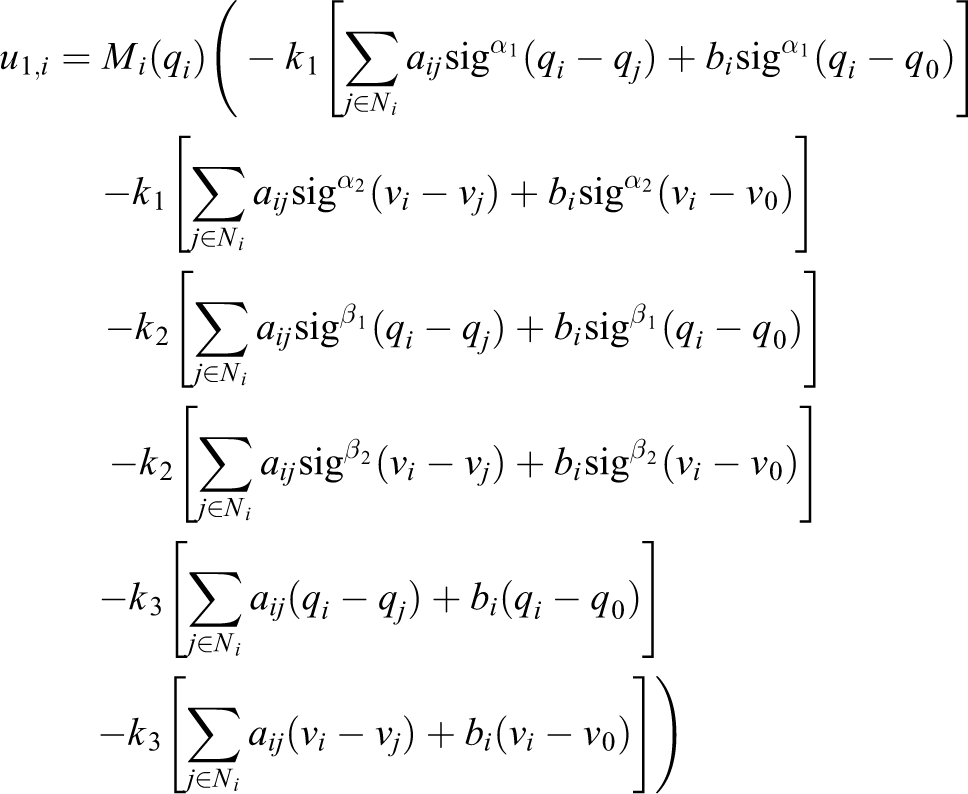
Based on theorem 1, the fixed-time synchronization control scheme can be designed as follows
In the simulation, the control gains of the above fixed-time control law can be chosen as , , , , .The response curves of the system are given in Figure 2. The simulation results demonstrate the performance of the proposed method in this paper.
Example 2: Synchronization control of electric power networks
Another interesting example of the effectiveness of the proposed control scheme is the synchronization control for electric power networks. The electric power networks with synchronous generators and inverters can be modeled as an undirected, connected, and weighted graph with n nodes , transmission lines , and admittance matrix .40 The nodes can be taken as agents. The typical network model can be expressed as
where is the phase angle of node i, is the natural rotation frequency, Mi and Di are the inertia and damping coefficients. for . is electrical angular frequency. In this article, all nodes have the same natural angular frequency .
Then the leader can be given as
and the follower with control input can be described as
Based on theorem 1, the fixed-time synchronization algorithm is designed as follows
Conclusion
In this article, we study a fixed-time synchronization problem with a second-order nonlinear MAS. A new homogeneous fixed-time synchronization control algorithm is proposed. Theoretical research shows that the designed control scheme can guarantee that the followers can track the leader’s trajectory within a fixed time regardless of the initial state of the system. Finally, the numerical simulations are carried out, and the effectiveness of the method is verified. Future work includes the discussion on the robustness of the proposed control algorithm.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National High Technology Research and Development program of China (2015AA050104) and by the State Key Program of National Natural Science Foundation of China (51637004).
ORCID iD
Di Wu
References
1.
ZhuJLuJYuX. Flocking of multi-agent non-holonomic systems with proximity graphs. IEEE Trans Circuits Syst I2013; 60(1): 199–210.
2.
RenWAtkinsE. Distributed multi-vehicle coordinated control via local information exchange. Int J Robust Nonlin2010; 17(10–11): 1002–1033.
3.
JeonISLeeJITahkMJ. Homing guidance law for cooperative attack of multiple missiles. J Guid Control Dynam2010; 33(1): 275–280.
4.
DuHJiangCWenG, et al.Current sharing control for parallel DC-DC buck converters based on finite-time control technique. IEEE Trans Ind Informat2019; 15(4): 2186–2198.
5.
ChengYZhangJDuH, et al.Global event-triggered output feedback stabilization of a class of nonlinear systems. IEEE Trans Syst Man Cybern Syst2019. DOI: 10.1109 / TSMC.2019.2931497.
6.
MaCWuW. Distributed synchronization of autonomous underwater vehicles with memorized protocol. Int J Adv Robot Syst2019; 16(2): 1–9.
7.
DoanQVLeTDLeQD, et al.A neural network–based synchronized computed torque controller for three degree-of-freedom planar parallel manipulators with uncertainties compensation. Int J Adv Robot Syst2018; 15(2): 1–13.
8.
OlfatisaberRMurrayRM. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Automat Control2004; 49(9): 1520–1533.
9.
DimarogonasDVTsiotrasPKyriakopoulosKJ. Leader–follower cooperative attitude control of multiple rigid bodies. Syst Control Lett2009; 58(6): 429–435.
10.
HongYGaoLChengD, et al.Lyapunov-based approach to multiagent systems with switching jointly connected interconnection. IEEE Trans Automat Control2007; 52(5): 943–948.
11.
RenW. Multi-vehicle consensus with a time-varying reference state. Syst Control Lett2007; 56(7): 474–483.
12.
YuWChenGCaoM, et al.Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Trans Syst Man Cybern B Cybern2010; 40(3): 881–891.
13.
SongQCaoJYuW. Second-order leader-following consensus of nonlinear multi-agent systems via pinning control. Syst Control Lett2010; 59(9): 553–562.
14.
LiuZGuanZShenX, et al.Consensus of multi-agent networks with aperiodic sampled communication via impulsive algorithm using position-only measurements. IEEE Trans Automat Control2012; 57(10): 2639–2643.
15.
LiuZWenGYuX, et al.Delayed impulsive control for consensus of multi-agent systems with switching communication graphs. IEEE Trans Cybern. Published online. DOI: 10.1109/TCYB.2019.2926115.
16.
ShenHWangTCaoJ, et al.Nonfragile dissipative synchronization for Markovian memristive neural networks: a gain-scheduled control scheme. IEEE Trans Neural Netw Learn Syst2019; 30(6): 1841–1853.
17.
BhatSPBernsteinD. Finite-time stability of continuous autonomous systems. SIAM J Control Optim2000; 38(3): 751–766.
18.
QianCLiJ. Global finite-time stabilization by output feedback for planar systems without observable linearization. IEEE Trans Automat Control2005; 50(6): 885–890.
19.
LiSDuHLinX. Finite-time consensus algorithm for multi-agent systems with double-integrator dynamics. Automatica2011; 47(8): 1706–1712.
20.
DuHLiSQianC. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans Automat Control2011; 56(11): 2711–2717.
21.
LiSZhouMYuX. Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Trans Ind Informat2013; 9(4): 1879–1891.
22.
ChenCZhangCHuT, et al.Finite-time tracking control for uncertain robotic manipulators using backstepping method and novel extended state observer. Int J Adv Robot Syst2019; 16(3): 1–15.
23.
FangLMaLDingS, et al.Finite-time stabilization for a class of high-order stochastic nonlinear systems with an output constraint. Appl Math Comput2019; 358: 63–79.
24.
DingSMeiKLiS. A new second-order sliding mode and its application to nonlinear constrained systems. IEEE Trans Automat Control2019; 64(6): 2545–2552.
25.
XiaoFWangLChenJ, et al.Finite-time formation control for multi-agent systems. Automatica2009; 45(11): 2605–2611.
26.
WangLXiaoF. Finite-time consensus problems for networks of dynamic agents. IEEE Trans Automat Control2010; 55(4): 950–955.
27.
LuXLuRChenS, et al.Finite-time distributed tracking control for multi-agent systems with a virtual leader. IEEE Trans Circuits Syst I2013; 60(2): 352–362.
28.
LiSWangX. Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica2013; 49(11): 3359–3367.
29.
PolyakovA. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Automat Control2012; 57(8): 2106–2110.
30.
HongHYuWWenG, et al.Distributed robust fixed-time consensus for nonlinear and disturbed multiagent systems. IEEE Trans Syst Man Cybern Syst2017; 47(7): 1464–1473.
WuDDuHWenG, et al.Fixed-time synchronization control for a class of master-slave systems based on homogeneous method. IEEE Trans Circuits Syst-II2019; 66(9): 1547–1551.
33.
ZuoZTianBDefoortM, et al.Fixed-time consensus tracking for multi-agent systems with high-order integrator dynamics. IEEE Trans Automat Control2018; 63(2): 563–570.
34.
RosierL. Homogeneous Lyapunov function for homogeneous continuous vector field. Syst Control Lett1992; 19(6): 467–473.
35.
DuHHeYChengY. Finite-time synchronization of a class of second-order nonlinear multi-agent systems using output feedback control. IEEE Trans Circuits Syst I2017; 61(6): 1778–1788.
36.
HongYXuYHuangJ. Finite-time control for robot manipulators. Syst Control Lett2002; 46(4): 185–200.
37.
QianCLinW. A continuous feedback approach to global strong stabilization of nonlinear systems. IEEE Trans Automat Control2001; 46(7): 1061–1079.
38.
BhatSPBernsteinDS. Geometric homogeneity with application to finite-time stability. Math Control Signal2005; 17(2): 101–127.
39.
ZhangMTanT. Hybrid control of the pendubot. IEEE-ASME Trans Mechatronics2002; 7(1): 79–86.
40.
DorflerFBulloF. Synchronization in complex networks of phase oscillators: a survey. Automatica2014; 50(6): 1539–1564.