
Abstract
Space debris capture is the base of the on-orbit servicing and space debris removal. Due to the lack of fixed grasping points and the uncertainty of motion parameters, the traditional spacecraft manipulator approach cannot be applied in the space debris capture. In this article, a novel adaptive capture approach based on origami principle is developed. Main advantages of the proposed method are as follows: (1) it can capture target without fixed points. Through multimodule unfolding, the capture mechanism can form a suitable configuration for the space debris, restrict its motion, and capture it. (2) As the caging configuration of the capture device can be changed through different module unfolding, it can satisfy different size of the space target. (3) It can save the launch space of the capture mechanism. The multimodule capture mechanism has small volume after folding, which can greatly save the storage space in launch stage. The structure of the capture mechanism based on origami principle is developed, and the grasping configuration design is proposed for different size of the space debris target. In addition, considering the disturbance in process of capture is nonlinear and is hard to obtain accurately, a novel extended state observer-based sliding control is developed for the capture process control. The simulation results demonstrate the efficiency of the control algorithm.
Introduction
Space debris capture is the base of the on-orbit servicing for the noncooperative spacecraft and space debris removal. Most space debris have lost the maneuver ability to control its attitude and become tumbling, which is affected by the perturbation momentum, such as solar pressure, gravity gradient, and the residual angular momentum. For these tumbling malfunctional satellite, the motion parameters like the tumbling angular speed, the dynamic parameters like the mass, the centroid, and moment of the inertia of satellite are uncertain. 1 Therefore, the fault satellite capture is difficult and challenging. 2
Many literature have studied the space debris capture problem. These methods can be divided into two categories according to whether it needs grappling points and accurate information of the capture target or not. Capturing using tentacles 3,4 requires accurate relative position and velocity between the object and the capture mechanism, but it is easy to test on ground with higher technology readiness level. Grasping with single robotic arm has been applied in many on-orbit servicing missions, 5 –9 which is also easy to test on ground with higher technology readiness level. However, in this problem, the grappling points are required before capture and it is difficult to apply in malfunctional satellite capture. Net capturing is not necessary to priori know the mass, inertia, and other physical parameters during capturing, but it is hard to control and test on ground. In addition, because the net captured the space target can hardly be removed, it is difficult to manipulate the wrapped target for the orbital servicing. 10 Other researchers studied the continuum manipulator to capture the space target. A continuum manipulator named OctArm is proposed by McMahan et al., 11 which contains three sections connected by the endplates. Each section contained with air muscle actuators and can be capable of two axes bending and extension with nine degrees of freedom. Capturing using tether gripper 12 can allow a large capturing distance, but the disadvantage is that the grappling points of the capture target are required, besides the reliability of the tether capture is low. It is apparent that advantages and drawbacks exist in each of those methods. An envelope grasping capture approach is developed by Sun et al., 13 three fingers are utilized to form a fixed configuration to capture the space debris, but it can only apply for the space debris with fixed size. As the motion parameters can hardly be obtained for the space debris capture, the impact/vibration and other perturbation or time delay in the process of space debris removal is inevitable. It is required to estimate the nonlinear disturbance and eliminate it using active control. Hu et al. 14 and Zhang et al. 15 studied the robust sliding mode control (SMC) problem for a class of uncertain nonlinear stochastic systems with mixed time delays. Sufficient conditions are established to ensure the stability of the system dynamics in the specified sliding surface by solving a certain semidefinite programming problem, and then, a full-state feedback SMC law is designed to guarantee the reaching conditions. Geng et al. 16 studied the tracking control problem. A Markovian jump ionospheric height bias model is presented by simultaneously considering the intermittent and abrupt ionosphere changes for the over-the-horizon radar target tracking. Geng et al. 17 studied the asynchronous multisensor fusion problem, and a two-stage fusion scheme is proposed to estimate the state, the unknown inputs (UI), and the UI-driven bias for asynchronous multisensor fusion to guarantee that all sensors work at the single sampling rate, especially in the distributive and heterogeneous case.
In this article, a novel adaptive capture approach for the space debris is developed. First, given the shape of the capture target, the motion envelop of the malfunctional satellite is provided. Then, based on origami principle, a novel multimodel capture mechanism is proposed, in which the different parts of the capture mechanism can unfold to form different capture configurations like spherical capture configuration and three-figure capture configuration. Through unfolding different parts of the multimodel capture mechanism, the capture configuration for different size of space debris is developed. Therefore, the proposed method is adaptive for the malfunctional satellite in terms of the size. In addition, as the multimodel capture mechanism can fold as a five-level planar structure before capture, it can significantly reduce the storage space. The main contribution of this work includes: (1) a novel space target capture mechanism that can form a suitable configuration for the space debris with different size and shape is developed based on origami principle; (2) based on the capture mechanism, an adaptive capture method that can apply for space debris capture without fixed grasping points is developed; (3) compared to other methods, it can save the launch space using proposed method, as the multimodule capture mechanism has small volume after folding.
The rest of the article is organized as follows: in the second section, the model of motion envelop of the malfunction satellite is provided. Then, in the third section, the multimodel foldable capture mechanism is developed based on origami principle. And, the capture configuration design approach using the multimodel foldable capture mechanism is proposed for different shape of the malfunctional satellite in the fourth section. Subsequently, considering the uncertain nonlinear disturbance in the process of the malfunctional satellite capture, an extended state observer (ESO) based sliding control is developed in the fourth section. Finally, the simulation results demonstrate the efficiency of the proposed control algorithm.
Motion envelop capture considering the parameters uncertainty
Under the action of space perturbation moments, the space debris often exhibits complex tumbling motion, which brings difficulties to the implementation of active debris removal mission. In theoretical analysis, the space debris is usually assumed to be a rigid body with typical shape. Typical motion patterns of the space debris are shown in Figure 1, including the spin motion around the minimum axis of inertia, the spin motion around the maximum axis of inertia, and the tumbling motion with nutation angle. Assume coordinate frame oxyz is fixed on the space debris target, which locates at the centroid of the target and coincides with the target's principal inertia axis, as shown in Figure 2. In real case, space debris targets could be affected by external perturbations. However, since the external forces/torques acting upon a free-floating object in space is usually small, it is reasonable to assume that the target in space is free from any external forces and torques for the purpose of analysis. The inertia and angular velocity of the space debris in the frame


Examples of different shape of malfunctional satellite.

Typical motion patterns of space debris. (a) Single spin, (b) flat spin, and (c) coning motion with nutation angle θ.
The attitude transformation matrix

where

Based on equations to, the rotational motion of a space debris target can be deduced theoretically. However, the space debris targets are usually noncooperative, implying that the information of a grasped space target, such as geometry parameters, kinematic and dynamic parameters, and inertial parameters, is incomplete and imprecise. Consequently, the measuring geometry and the predicted motion of the space debris are usually inaccurate, which will definitely bring difficulty for the space debris capture. While the proposed adaptive caging-based capture method can deal with uncertainty because caging is a loose closure strategy with certain margin and allows changing the size of a caging formation within the margin.
Envelop capture using multimodel capture mechanism
Structure design of the capture mechanism
In this work, to simplify the analysis, the shape of the space debris is assumed as the sphere. To capture the space debris adaptively, whose radium is in range of 1–500 cm, the multimodel capture mechanism is designed based on origami principle. As shown in Figure 3(a), a soccer-like spherical envelop structure is applied to design the capture mechanism. The proposed capture mechanism can fold as a five-level petaloid structure before launching, and then, it can unfold as a planar structure after the release before capture, as shown in Figure 3(b). In capture process, it can form a soccer-like grasping configuration or three/two-finger configuration. Thus, it can find that the advantages of the capture mechanism lie on its modularization, lightweight, and miniaturization.
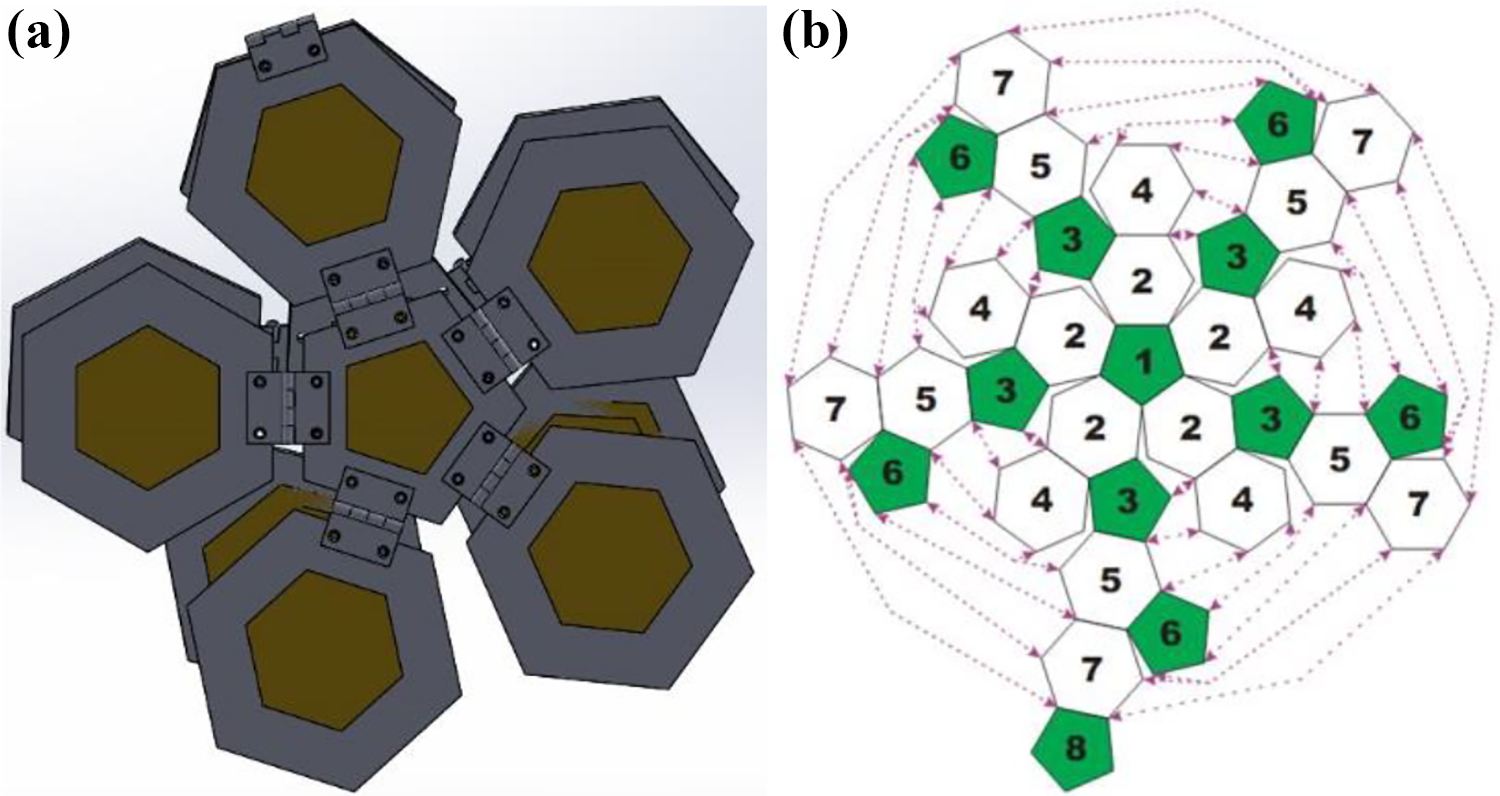
(a) The folded five-level planar structure and (b) unfolded planer structure.
Three types of capture configuration using multimodel capture mechanism
For the case of small space debris, whose radium is in range of 1 –10 cm, the totally closed soccer-like sphere caging configuration is developed to capture the debris. The soccer-like caging configuration consists of 12 regular pentagonal blades and 20 regular hexagonal blades, in which the regular pentagon and regular hexagonal edges are equal in length, as shown in Figure 3. By means of steering gear driving, the angle between adjacent blades reaches a certain angle, then the planar plates can be combined into spherical closed bodies. In the proposed soccer-like caging configuration, the angle between the regular pentagon and the regular hexagon is 142.62°, and the angle between the two regular hexagons is 138.19°. The process of folding and forming a soccer-like sphere caging configuration is shown in Figure 4.

The process of soccer-like configuration forming.
For the case of medium size of space target, whose size is beyond that of the enclosed sphere configuration, the three-finger caging configuration is applied for space target capture. The unfolding planner structure of the capture mechanism can be divided into five parts, which are noted as finger 1 to finger 5. For three-finger caging, two adjacent fingers and one separated finger can form a semienclosed configuration to cage the space target. The process of folding the capture mechanism is shown in Figure 5.

The process of three-finger configuration forming.
Adaptive capture configuration design
As stated by Rimon and Blake, 18 to capture the space target safely, the motion envelope of the space target is defined as the circumscribed sphere of the reachable region. It contains all positions that a tumbling target may arrive at. Specifically, the center of the sphere is set at the centroid of the target, and the radius is specified by the maximum distance from the outer surface of the reachable region to the centroid of the target, as shown in Figure 6. The sphere model of the motion envelope constructed above compensates uncertainties by magnifying the reachable region of the target.

The motion envelope. (a) Initial angular velocity [0,0,4]T deg/s and (b) initial angular velocity [−4, −2, −2]T deg/s.
Set the space target’s centroid in the inertial frame as

where St
represents the motion envelope of the space target considered the motion uncertainty and Step 1: Establish a virtual manipulator model based on the parameters of capture mechanism; Step 2: Determine the coordinate transformation matrix between connected objects; Step 3: Generate joint angles Θ of the capture mechanism and the base attitude angles Step 4: Substitute Step 5: Draw all the endpoints to create a cloud map of the space robot’s workspace.
The superscript I represents the variable expressed in the inertial frame. Based on the VM model, the position of the end-effector can be expressed as

where
The distance from the center of mass to the end-effector R is

Based on the geometric analysis, the caging configuration of the capture mechanism is a ball ring when

While it is a ball when

The spatial region formed by the workspace is denoted as Sm , according to equations (8) and (9), it can be expressed as

where
Remark
Equation (10) defined the workspace of the capture mechanism. The position of the capture mechanism can be optimized to satisfy the capture workspace constraints.
Nonlinear perturbation control based on ESO sliding algorithm
Control dynamics model
In case of adaptive capture, the disturbance for the capture control is nonlinear. In this section, an SMC based on ESO is developed to estimate the external disturbance and reject the disturbance in the process of the space debris removal. The dynamics model in the work of Soltanpour et al. 19 was utilized as the dynamic of the capture process, and the specific structure of the manipulator is shown in Figure 7.

Three-joint mechanical arm structure.
As shown in Figure 7, the length of the postbrachium is l
2; the mass of the postbrachium is m
2; the mass of the forearm is m
3; the distance from the center of mass of the postbrachium to joint 2 is r
2; the distance from the center of mass of the forearm to joint 3 is r
3; and the moment of inertia of the column, the postbrachium, and the forearm is

where




where

Sliding control method based on ESO
Due to the nonlinearity and unpredictability of the dynamics model of the capture of the space debris adaptively, it puts forward many requirements for the control method: (1) it can predict the unknown part and (2) it can handle nonlinear characteristics. The sliding control method based on nonlinear ESO used in this article can realize the perfect control of manipulator for the safely capture control. (1) Design of tracking differentiator (TD)
Given a reference signal, the TD is designed to track the reference signal and provide the tracked signal and its differential signal for the controller. The form of the TD is given as follows:

where V
0 is the given input, V
1 is the output tracking V
0, and V
2 is the differential signal of V
1. Both of V
1 and V
2 are regarded as parts of control inputs based on the control theory, and

(2) ESO design
Here, the ESO is introduced to deal with the strong nonlinearity of the system. The unknown nonlinear term

where

where

For simplicity,

Sliding controller
We design the sliding surface to be as follows:

where
And then, we have the slope of the sliding surface as

We choose the Lyapunov function as follows:

where b 0 is a positive constant. So, the function is positive definite. So, we take the derivative with V 1, and we get

To make

where
If we substitute u for

Remark
Equation (28) proves the global stability of the system if the control input is chosen as equation (27).
Mathematical simulation analysis
The initial value of the three joints is set as

Comparison of
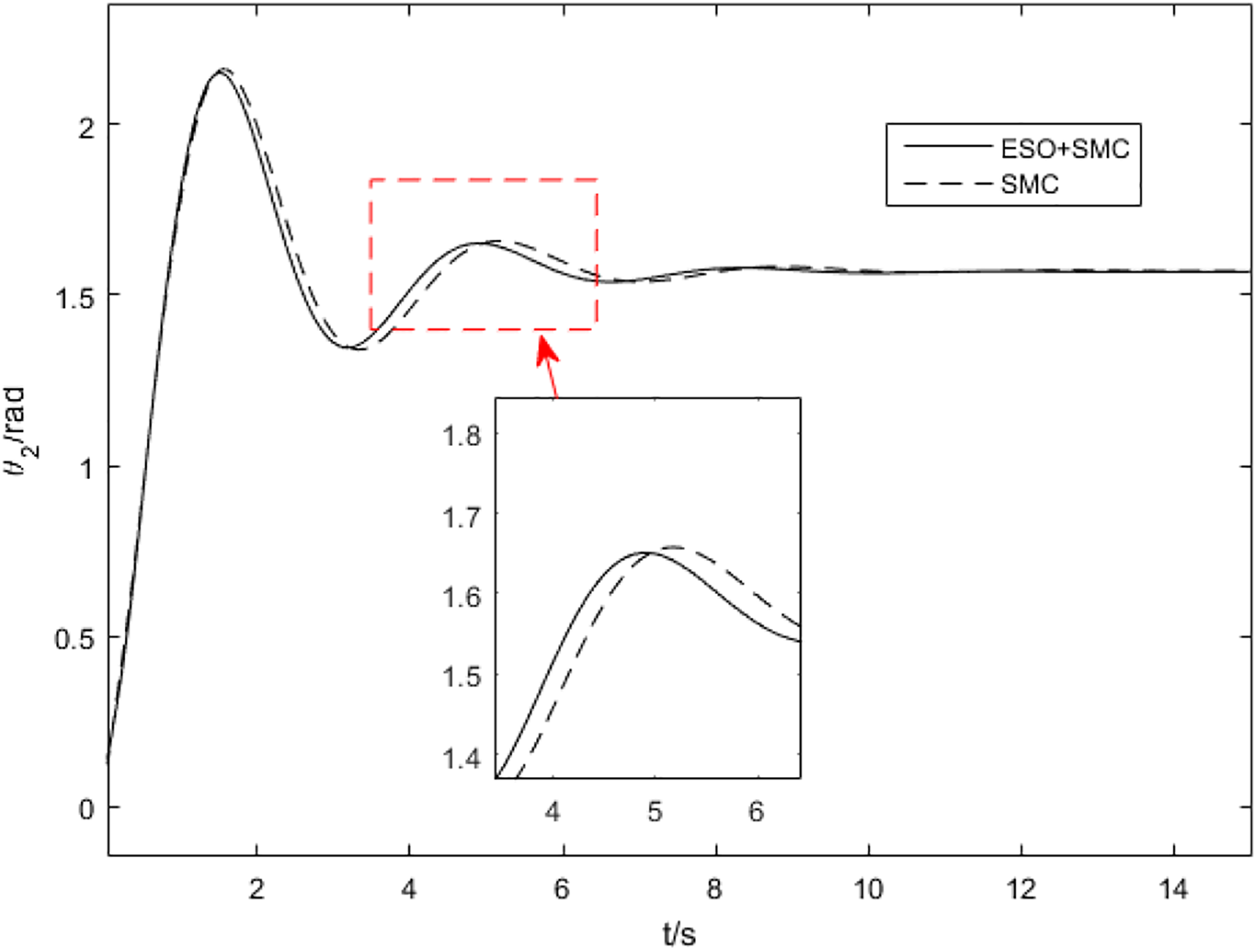
Comparison of

Comparison of
Figure 8 shows the change of
Conclusions
In this article, a novel adaptive capture approach for the space debris removal is proposed. Through unfolding the different parts of the multimodule, the capture mechanism can form different capture configurations to grasp the space target; therefore, it is adaptive for different size of the space debris. As there is no need for the fixed grasping points, the proposed capture approach can apply for the space debris with uncertain motion parameters. In addition, as the capture mechanism can fold, it can significantly reduce storage space. Finally, an ESO-based sliding control approach is developed for the adaptive capture, in which the ESO is utilized to estimate the nonlinear disturbance in the process of capture, and the sliding controller is utilized to stable the whole system. The simulation results demonstrate the efficiency of the proposed control method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by the National Natural Science Foundation of China under grant no. 11802238.