
Abstract
With the rapid development of automated vehicles, there is currently a significant amount of automated driving research. Giving automated vehicles capabilities similar to those of experienced drivers will allow them to share the road harmoniously with manned vehicles, especially on two-lane urban curves. To represent the steering behavior of experienced drivers, a series of curve feature distances are proposed, which is determined by multi-regression. These series of curve feature distances are used to generate a trapezoidal steering angle model which imitates the steering behavior of the experienced test drivers. To verify the feasibility and human-likeness of the proposed trapezoidal steering angle model, the model is used with constant vehicle speed to plan a human-like trajectory which is tracked using model predictive control. The simulation results show that the proposed trapezoidal steering angle model is human-like and could be used to give automated vehicles human-like driving capability when driving on two-lane curves.
Keywords
Introduction
Automated vehicle is a solution to reduce exhaust emission, traffic congestion, and energy consumption. However, the population of highly automated or fully automated vehicles is a gradual development. This means human-operated vehicles and automated vehicles will share the road in the next decades. 1 Giving automated vehicles abilities to understand and imitate the characteristics of experienced drivers will improve the traffic environment and allow them to share the road harmoniously with the manned vehicles.
Research on the automated driving focus on demonstrating the feasibility and reliability of the technique applied to automated vehicles in previous research. Meanwhile, there are also some research studies that contribute to finding out driving characteristics for further investigation on human-like automated driving. In the aspect of the methods on imitating human behaviors, the current research can be generally divided into two classifications.
First, locally learning how humans make decisions in the varying traffic environment. The research imitates the passing decisions made by human drivers when the vehicles are in complex traffic environment with traffic lights and pedestrians. 1 The choice of the trajectory of experienced drivers when they face the dangerous traffic environments is also learnt. 2 The real traffic environments are also learnt using the method of double Q-learning 3 and convolution neural network (CNN) 4 to mimic the speed and trajectory of vehicles, respectively. The interaction and cooperation behaviors of the human are also imitated to achieve the human-like maneuvers. 5
Second, globally mimicking the results of decision-making made by human drivers in still environments. The different driving styles are learnt to achieve the human-like swerve maneuvers. 6 In car following process, the space interval and time interval of human drivers are imitated. 7 The geographical features of roads are considered to achieve human-like speed. 8,9
As mentioned in the first classification, CNN is a method to imitate the trajectory of human driver. 10 However, the trajectory obtained through CNN is only suitable for the fixed traffic environment. This article proposes a human-like steering angle model which can be used to plan the human-like trajectory globally and can be applied in different geographical environment.
The trajectories of the human drivers change with the varying geographical environment of the different road, especially the curves. It is found that the control character of human driver on lateral and longitudinal directions can also be reflected on the curve Thus, there are some research studies on the relationship between the objective factors of the curves and the subjective factors of the human drivers. In the aspect of trajectories of different driving styles, the study clarifies and segments these trajectories. 11 In the aspect of analyzing the relationship between radius of curve, curve subtended angle, speed, and the trajectory, the research proposed that the qualitative analysis cannot be used in the quantitative equations. Although the quantitative equations like the trajectory models, 12,13 speed models, 14,15 and speed–trajectory models 16,17 are put forward, the output of these models is not continuous along the whole curve but special speed or lateral offset on specific positions of the curves. It is also significant to analyze the lateral control character of human drivers on curves. Thus, the quantitative relation is obtained by analyzing the steering angle continuously varying on the curve in natural driving environment in this article.
In the aspect of steering angle prediction of automated vehicles, some studies predict the expected angles by identifying the lane mark. The research predicts the steering angle accurately based on the images through different methods of deep learning like 3-D CNN, long short term memory (LSTM), and residual neural network (ResNET). 18 The research predicts the steering angle by identifying the lane mark collected by event-based vision. 19
In addition to image identification, some studies predict the steering angle by learning the actual steering data of human drivers using intelligent algorithm. The deep belief network is used to build the learning model in which the training steering data are collected from drivers driving on the real-world roads. 20 The steering wheel angles can be identified from the past driving decisions of human driver. They are represented in the form of time series data for neural network which is trained by machine learning. 21 The steering angles, which are predicted by learning the real driving data, are suitable for the fixed traffic environment. Therefore, this research proposed a human-like steering wheel angle which can be applied on different curves in some conditions.
The main duties of this study are as follows. To get the driving data of experienced human driver, the field experiments were carried out on four urban two-lane curves with three experienced drivers and one German passenger vehicle at different specific driving speeds. Steering wheel angle sensor and speed sensor collected the vehicle dynamic parameters including vehicle speed, steering wheel angle, yaw angle velocity, lateral acceleration, longitude acceleration, and so on. This study proposes a trapezoidal steering angle model that could not only exhibit the continuous varying progress in a curve but also quantize the relationship between the radius of curve, curve subtended angle, speed, and feature distance of curve. To verify the feasibility of applying the human-like steering angle model on the automated vehicles, a new method of planning human-like reference trajectory on the two-lane curve is put forward with the proposed trapezoidal steering angle model. The planned reference trajectory is tracked by model predictive control (MPC) tracking controller.
The contributions of this research cover the following aspects. First, different from the driving data collected in other research of driving on curves, this study collects the natural driving data of experienced drivers. This study proposes a method to deal with the time series data, and the processed data reflect the steering character on the different positions of the curve at different speeds. Second, the proposed trapezoidal steering angle model can work as a general model which can be applied on different two-lane curves. Third, there is a simulation experiment to verify validation of applying the human-like steering angle model on automated vehicles by planning the human-like reference trajectory which is tracked by MPC.
This article is arranged as follows. The first section introduces the background and aim of this article. The second section describes the process of the field experiments progress for collecting vehicles dynamic parameters of experienced drivers on curves. The third section analyzes the vehicle dynamic parameters. The fourth section proposes a human-like trapezoidal steering angle model which combines the objective road factors and vehicle speed together. In the fifth section, the planned human-like reference trajectory will be tracked by applying MPC with practical human operating constraints. Finally, conclusions are remarked in the final section.
Experimental data collection
To understand the relationship among steering angles and factors like curve subtended angle, radius of curve, and driving speed on the two-lane curves. A series of vehicle field experiments were conducted and detailed as follows.
Participants
Three driving instructors, who work in driving schools, were selected as experienced drivers. Details are presented in Table 1.
Detailed information of experienced drivers.

The selected drivers are engaged in supplying the trainings of driving skill to people never driving before. They have systematic driving skill over their driving years. In addition, the average number of driving year is 28.3 years. Therefore, they are regarded as experienced drivers.
Experimental vehicle and parameters collection equipment
One Skoda Octavia vehicle (shown in Figure 1) with German line was chosen to complete the field experiments. The vehicle dynamic parameters collecting equipment consist of a steering wheel sensor (measuring steering master, steering wheel angles, and steering wheel angle velocity), the speed sensor (measuring vehicle speed, pitch angle, roll angle, lateral acceleration, and longitudinal acceleration), signal transmission box, power source, and power distribution box. The signal transmission boxes of sensors transmit steering wheel signal and speed signal to the computer for collecting the related vehicle dynamic parameters.
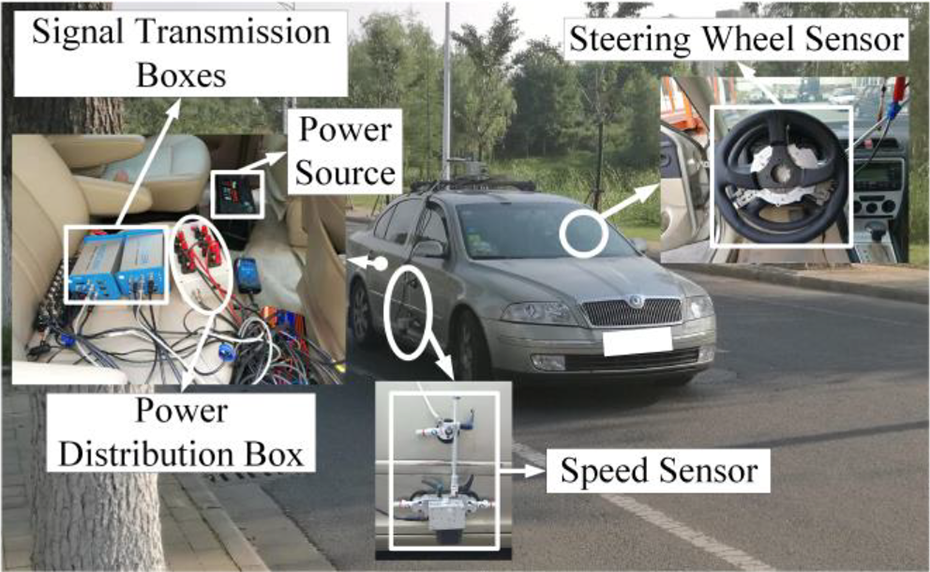
Experimental vehicle and equipment.
The trajectories of vehicle traveling on curves are also collected by positioning system combined with GNSS and INS (SDI-600GI) whose error bound is 0.01 m. The position system is shown in Figure 2.

Positioning system.
Experimental roads
The experiments were carried out on four two-lane urban curves with a different curve subtended angle and radius of curve in a traffic-free environment. The specified information of the experimental roads is shown in Figure 3.

Experimental roads.
Experimental process
Vehicle speed is always considered as a controlling factor that influences the points where actual steering angle changes. 8 This research focuses on the varying lateral character-steering wheel angle on the curves. To reduce the impact of speed on steering angles, participants were required to drive through the curves at specified speeds which were 20, 30, 40, and 50 km/h. At each speed, every driver repeated the experiment two times in one driving direction on each experimental road. Two flags were set at the experiments’ start and end position respectively on each experimental road that helps data of each experiment to be recorded from the same position.
The experimental results of trajectory, speed, and steering angle
In this section, the procedures of concrete data processing are introduced. The steering wheel angles and speed results are also represented.
Time series data transferring methods
To obtain the varying features of steering angle of human driver on the specific location of the curves at different speeds, the time series data of steering wheel angles and speed need to be transferred into data related to distance. We exported the steering angle and speed data with the same frequency 20 Hz.
The virtual stake is defined on the road in Figure 4. The specific processing step of time series data is shown in Figure 4.

Virtual stake and data processing step.
Both centerline of the curve and traveling trajectory are GPS data in standard of WGS84. First, these GPS data are transferred into plane coordinate data. Second, the transferred centerline data can be divided with identical interval. These equal diversion points are virtual stakes shown in Figure 4. The lateral distance of the trajectory is the lateral distance between virtual stake and the trajectory point, which is most close to the normal position of virtual stake. The lateral distances of different virtual stakes represent the traveling trajectory of drivers. Third, because the length of speed and steering angle data are the same as the length of trajectory, we select the speed and steering angle data as well as the transferred traveling trajectory data which are close to the normal position of virtual stake. Finally, the speed and steering angle data on different virtual positions are obtained.
The experimental trajectory, speed, and steering wheel angle
The trajectories of different experienced drivers at 20 km/h on road 1 is shown in Figure 5.

The trajectory of different experienced drivers at 20 km/h in the inner direction of road 1.
The trajectories have the similar trend of different drivers. It approves that the selected drivers equipped with the similar steering characters in the same driving environment. Pearson correlation coefficient is used to explain the similarity of trajectories. The results are presented in Table 2.
The correlation coefficient of different experienced driver’s lateral distance at different speeds.

When the coefficient is equal to 1, the correlation of the trajectories is total positive correlated. As presented in Table 2, the coefficient is very close to 1. It represents the trajectories of different drivers at different speeds are similar with each other. Although the number of experienced drivers is small, they have the similar steering character at different speeds on the same curve. The further study on steering angles is reliable with these three drivers.
Vehicle speed and steering wheel angle are analyzed to illustrate the longitudinal and lateral features of a vehicle when driving on the curves.
The average speed is

where vi is exported vehicle speed on different virtual stakes. The mean speed around different specified speed is figured out in Figure 6.
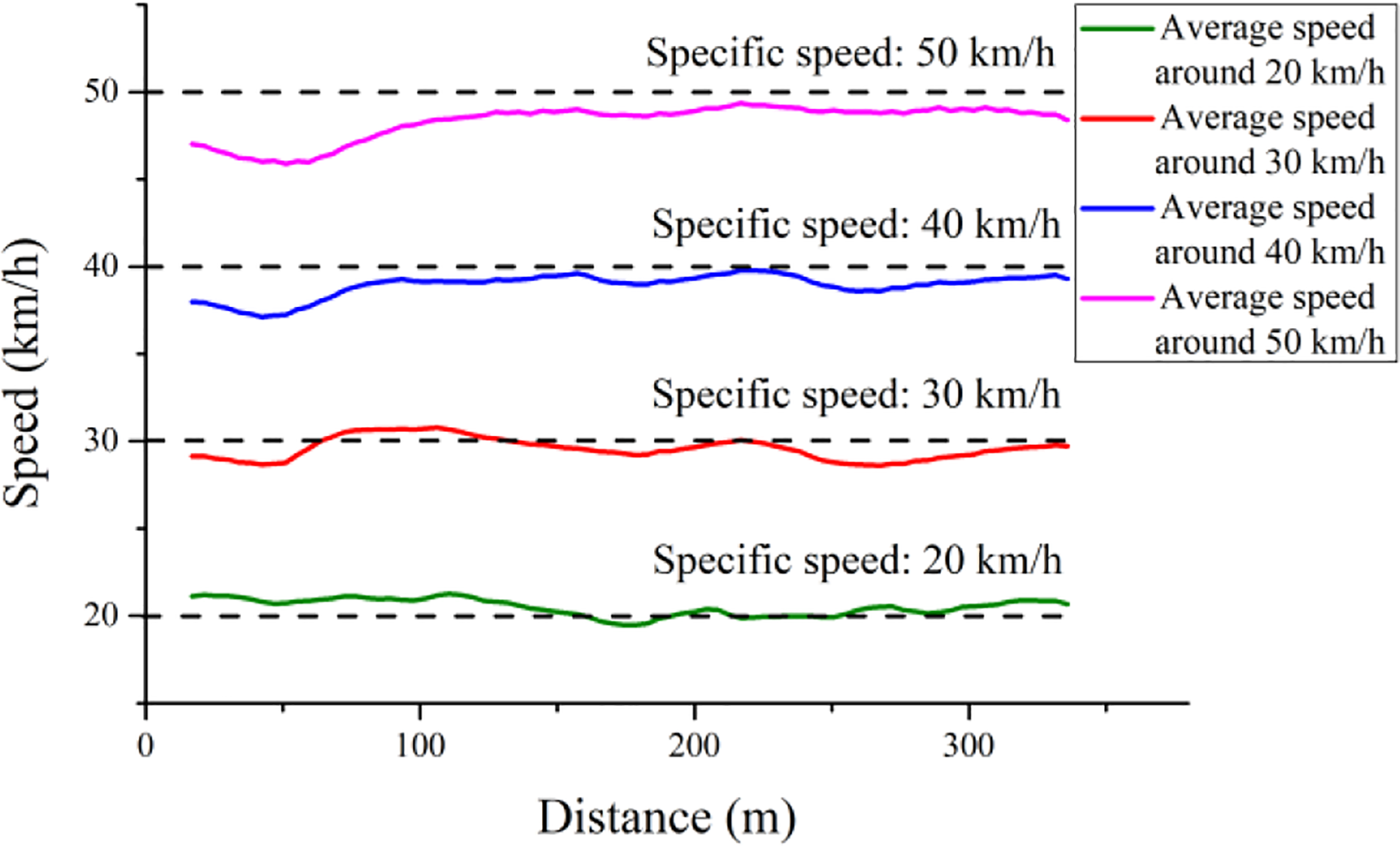
Average speed around different specified speed in the inner direction of road 1 (R = 100 m).
It is apparent that experienced drivers keep the speed around the specified speed on the curve whose radius is 100 m. The same results are found on other three experimental roads.
The result shows that a stable speed in the longitudinal direction which can be maintained by experienced drivers can make passengers feel more comfortable. The stable speed reduces its impact on steering angles. It also makes our research about lateral features of experienced drivers on curves more reasonable.
Steering wheel angles collected on the curves in experiments are shown in Figure 7.
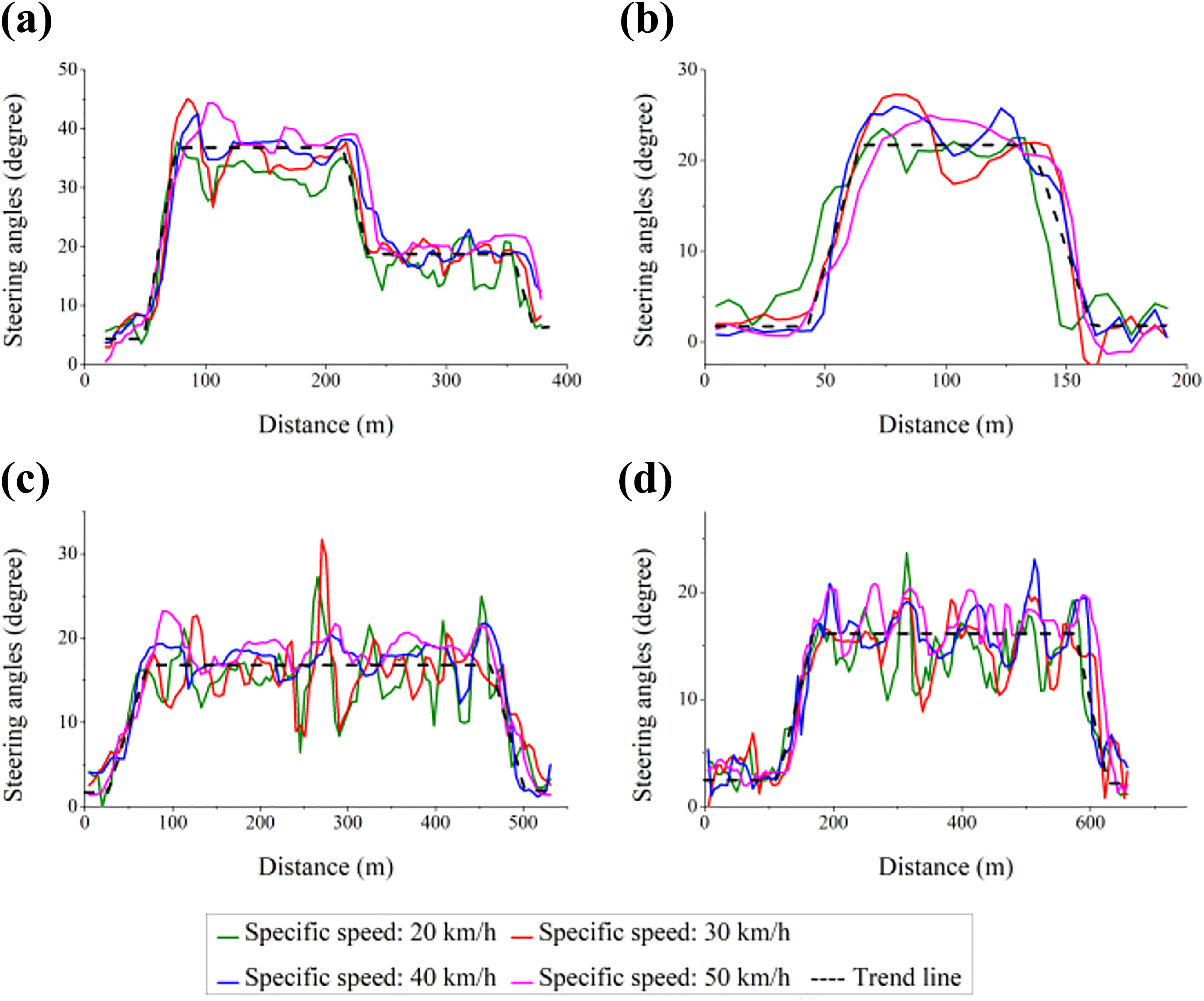
Steering wheel angles of one experienced driver in specified speed 40 km/h on the inner direction of different curves: (a) road 1 with the radius of curve 100 m; (b) road 4 with the radius of curve 136 m; (c) road 3 with the radius of curve 226 m; and (d) road 2 with the radius of curve 252 m.
The profiles of steering wheel angles do not match the varying curvature of the road so well. The actual varying positions of steering angles change at different speeds. The steering angle trend lines are similar with trapezoid profile which can explain the varying trend of steering angles on the curve. Because the road 1 consists of two circular arc parts, there are two constant steering angle segments. This research uses the first circular part in further study. Similar results are achieved by other experienced drivers on the four curves at the same specified speeds.
As a result, the assumption that the speed affects the steering positions of experienced drivers on curves is acceptable. Further analysis needs to be done on more varieties like the radius of curve and curve subtended angle. Nevertheless, more studies are required about the influence of the above three factors simultaneously.
Steering angle modeling
In this section, we proposed a human-like trapezoidal steering angle model to quantitate the relationship between objective road factors and steering wheel angles generated by human drivers.
Ideal curve
The results of the steering wheel angle are intuitional and qualitative. Therefore, steering angles model in the quantitative form can be applied into engineering problems. The curve is idealized by simplifying the complexed actual experimental roads using several parameters. The ideal curve, which can be described by the curve straight length, the radius of curve R, and curve subtended angle α, is constituted of three sections: straight part, circular curve part, and straight part. They are shown in Figure 8. The driving speed on the ideal curve is set to be constant in this research.

Feature points and distances on the ideal curve.
Definition of curve feature distances
The steering positions of human drivers are not consistent with the geometrical varying position of the curve. Therefore, in our proposed steering angle model, a series of feature distances are put forward to replicate the actual human steering positions on the curve.
These feature points can be divided into two categories. First, curve tangent point 1 is
Aside from the above, the curve feature distances can be divided into two categories as shown in Figure 6. The feature distances can be achieved by
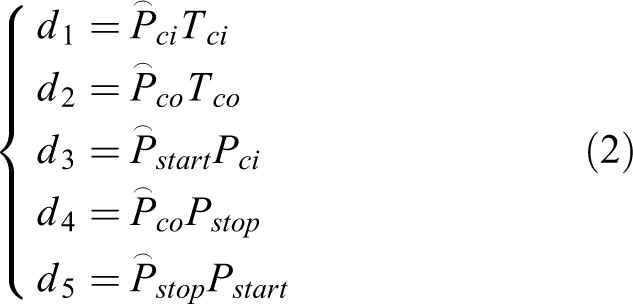
One combines ideal road tangent points and entering curve point as well as exiting curve point together to represent the actual entering and exiting curve positions of experienced drivers related to the ideal road tangent points. They are entering curve-related distance d
1 and exiting curve-related distance d
2. The other category expresses the steering process of the human driver on the whole curve. They are entering curve distance d
3, exiting curve distance d
4, and steering angle balancing distance d
5. The entering curve-related distance d
1 is going to be the negative value and exiting curve-related distance d
2 is the positive value, because the drivers in experiment enter the curve before the curve tangent point 1
The curve feature distances, which contain the human trajectory and road geographical character, describe the human driver steering process in distance. It is also a bridge that connect the objective road factors and human steering angles. It makes the human-like steering angle quantitative equations available. The curve feature distances are related to speed as well as the curve subtended angle and radius of curve.
Quantitative equations of feature distances
Multiple regression is applied to obtain the equation between curve feature distances and speed, the radius of curve as well as curve subtended angle. The multiple regression model applied in this research is a quadratic model as follows

where
The main regression results are shown in equation (4) to equation (13). The independent variables, speed, the radius of curve, and curve subtended angle, are symbolized as x 1, x 2, and x 3, respectively, the units of which are km/h, m, and rad, respectively. Because of the two different driving directions on the two-lane curve, every direction has five feature distance models. The different symbols are used to distinguish the two driving directions. Thus, i and o are used as the subscript label of the curve feature distances to distribute the two driving directions










There are some statistic indexes for evaluating the performance of the regression models. The coefficients of determination (R 2) of different curve feature distances are 0.8766, 0.8883, 0.8222, 0.7772, 0.9975, 0.849, 0.9064, 0.7964, 0.8798, and 0.9955, respectively. These coefficients are high enough to explain the most sample data of the independent variables in the regression models. The p-value of the regression model is also less than 0.1 which means the terms in the model are significant to the regression models. What’s more, (s) is the standard deviation of the distance between the sample values and the fitted values. The standard deviation of feature distance models is 3.30, 4.43, 5.42, 6.03, 7.88, 4.66, 4.07, 4.89, 5.08, and 7.58, respectively. The smallest standard deviation is 3.3, while the biggest standard deviation is 7.88. The longest length of curve is up to 800 m, the biggest standard deviation is acceptable. So the multiple regression models of curve feature distances fit the sample data well.
Trapezoidal steering angle model
We found out that steering positions of experienced drivers are related to driving speeds, the radius of curve, and curve subtended angle on the curve. The quantitative equations of steering positions are applied to represent the human-like trapezoidal steering angle model. According to the theory of Ackerman steering, the ideal steering angle is easily and certainly to be measured with the vehicle axle length and the radius of curve. Especially, the difference of steering angle between the left and the right directive wheel angles can be neglected because the range of curve is from 100 m to 250 m in our research. This model represents the relationship between the steering angle and time which can be computed by the curve feature distance and constant driving speed. The function image of steering angle model is shown in Figure 9.

Function image of steering angle model.
And the detailed equations of steering angle model are shown in equation (14)

Especially,



where l is the length of a vehicle axle, R is the radius of curve,
It is known that if the radius of curve and curve subtended angle as well as constant traveling speed are determinate, the curve feature distances can be computed by the regression model calculated in the previous section. Therefore, the human-like steering angle could be calculated on the curve whose radius range of curve is from 100 m to 252 m and the radian of curve is from 0.506 rad to 1.741 rad using the human-like steering angle model.
Verification of the trapezoidal steering angle model
The trapezoidal steering angle model is verified on a verified curve with the radius of curve 140 m and the radian of curve 0.5355 rad at four specified speed which are 20, 30, 40, and 50km/h, respectively. The test curve is shown in Figure 10. One of the selected experienced drivers take part in the verifying experiment.

Curve for verification.
Because the actual steering angle measured by the sensor is steering wheel angle, the modeled steering angle need to be transferred into the steering wheel angle by the steering gear ratio. The steering gear ratio of the experimental vehicle is 16.9. The comparison results of practical steering angles and steering angles computed in the proposed steering angle models are shown in Figure 11.

The comparison results between practical steering angles and modeled steering angles on the inner direction of the verified curve: (a) compare results in 20 km/h; (b) compare results in 30 km/h; (c) compare results in 40 km/h; and (d) compare results in 50 km/h.
Two sets of actual steering angle data are chosen to exclude the contingency of the actual experimental results. The contour plot of the modeled steering angle is similar to that of the actual human driver steering angle. The angular velocity of the modeled steering angle, which is the slope of the modeled steering angle line in Figure 11, is almost the same as the actual steering angle. The performance of the trapezoidal steering angle in 20 km/h is not so good at the other three specified speeds. Because drivers modify the steering wheel more frequent at low speed. This leads to the uncertain varying position of steering angles at low speed. The steering angle model does not perform well at low speed. Additionally, the positions of the modeled steering angle are varying around the actual steering angle. Thus, results of calculating steering angle in the proposed steering angle model based on human driving features are generally good to generate the human-like trajectory on a curve.
In addition to the comparison of visual verification, the performance indexes are also applied to estimate the trapezoidal steering angle model. There are many research studies 22 –27 that use the following indexes to estimate the performance of the model: root mean squared error (RMSE), mean absolute error (MAE), and mean bias error (MBE) which are figured out by equations (15), (16), and (17), respectively



where
RMSE and MAE measure the residual between the actual value and the calculated value, which represent the concentration of the actual value around the modeled value calculated by the regression models. MBE is used to judge whether the modeled value is overestimated or underestimated. The performance indexes results of the trapezoidal steering angle model are presented in Table 3. There are two pieces of practical steering angle data, so the values of performance indexes are the average value of these two pieces.
Performance indexes of trapezoidal steering angle model.

It is shown that the values of performance indexes in 20 km/h are bigger than those at other three speeds which correspond with the results in Figure 8. And these values are not small enough to explain the precision of the trapezoidal steering angle model. Because the steering angle of the human driver is varying around the ideal steering angle
Human-like trajectory planning and tracking with MPC
With the reference trajectory, MPC is widely used on the trajectory tracking of automated vehicle. 28 –30 With the current state and future inputs of the vehicle, the future state can be predicted in finite predictive horizon. The future inputs can be figured out by solving the optimization problem with the constraints of control and state variables. The important advantage of constrained MPC is its ability to cope with control and state variables well. 31 In this article, the constrained MPC is used to track the planed human-like trajectory to verify that the method of human-like planning is feasible in a simulation environment.
Aimed at applying the proposed trapezoidal steering angle model to the automated vehicle, a series of simulations are carried out to verify this model. A human-like trajectory is planned at the constant traveling speed and trapezoidal steering angle model, and the planned human-like trajectory is tracked by using MPC.
Vehicle trajectory tracking process
The tracking process composes of the reference trajectory, MPC controller, and vehicle actuator. The flow chart of vehicle trajectory tracking is shown in Figure 12.

Vehicle trajectory tracking process.
Human-like trajectory planning
Because the vehicle travels in the vehicle coordinate system which varies along with the vehicle motions as shown in Figure 13, the x and y direction positions in the absolute coordinate system need to be translated to the course angle θ.

Vehicle motions in the absolute coordinate system.
The human-like reference trajectory is required to describe the specific state in the absolute coordinate system, the motion states in human-like trajectory include the x direction position, the y direction position, and the course angle θ. The planned human-like trajectory varying progress coincides with the vehicle kinematic rules in equation (18)

where δ is obtained from the proposed trapezoidal steering angle model, l is the vehicle axle, and v is the constant.
The reference trajectory, tracked with the method of MPC, is required to be in discrete form. So, the planned human-like reference trajectory could be in the form of discrete points in equation (19)

where
Tracking human-like trajectory by MPC
MPC systems are designed based on a mathematical model of the plant. The model should be in state space form for designing control system.
The vehicle kinematic model is given in equation (20). Because the vehicle speed is constant, the state variables and control variables can be
Therefore, a linear kinematic model of the error could be obtained by equation (18) subtracting reference trajectory

where





MPC controller design is determined by the objective function and constraints in quadratic programming form. But aimed at getting the predictive output value in prediction horizon Np
and control value in control horizon Nc
, the vehicle kinematic error model need to be transferred. The new state variables are

where
The equation of the predictive model could be calculated in equation (22)

where


The optimizing aims of this research are to reduce the difference between output and reference as well as make the control more stable. The objective function applied in this research is given in equation (23)

where matrices Q and R are used to control the priority of each term of the objective function during the optimization step. If the bigger the Q is, the smaller the difference is expected in the system. If the bigger the R is, the more stable control performance is expected in the system.
The objective function is given as equation (23) with constraint given as follows

Simulation and results
Carsim and MATLAB/Simulink joint simulation method was chosen to do the whole vehicle trajectory tracking simulation. The actuator vehicle is modeled in Carsim, and the MPC controller is created in the form of S-function in MATLAB/Simulink. The parameters of the vehicle in the simulation are the same as the experimental vehicle, and the constant speeds for simulation are 20, 30, 40, and50 km/h, respectively. The simulation parameters are shown in Table 4.
Simulation parameters.

And
The practical driving trajectories generated by human experienced drivers are in the inner direction of the same verified curve intentioned in the previous parts.
The outcomes of comparison between the simulation results of the tracking trajectory in MPC and practical driving trajectories are shown in Figure 14.

The comparison results between practical driving trajectory and simulation results of the tracking trajectory on the inner direction of verified curve: (a) compare results in 20 km/h; (b) compare results in 30 km/h; (c) compare results in 40 km/h; and (d) compare results in 50 km/h.
The origin of the absolute coordinate system is on the start point of the vehicle before entering the curve. It is apparent that the practical trajectory coincides with the planned human-like trajectory at different specified speeds. And the tracking results coincide with the planned human-like trajectory. Thus, the tracking results are similar with the practical trajectories and possess the human steering features on the curve at the speed range from 20 km/h to 50 km/h.
The tracking results are very close to the planned human-like reference trajectory. Thus, the tracking offset is figured out as shown in Figure 15.

The offset of tracking results: (a) compare results in 20 km/h; (b) compare results in 30 km/h; (c) compare results in 40 km/h; and (d) compare results in 50 km/h.
The different simulation time is designed due to different specified speed. The average tracking offset increases along with the increasing driving speed, but the tracking offset is very small. The tracking offset increases shapely after few seconds because the vehicle starts entering the curve. The tracking offset changes sharply at 20 km/h. This is the same as the driving character of experienced drivers at low speed. Generally, the offset of tracking results at different specified speeds, which are less than 0.3 m, are small enough as expected. Therefore, the tracking performance of planned human-like reference trajectory tracked in the method of MPC could be regarded as a good one.
Conclusion
In this article, the natural driving experiments are carried out to collect the driving data of the experienced drivers on four two-lane curves. After analyzing the driving speed and steering wheel angles of the experienced drivers, it is found that the experienced drivers could maintain the vehicle at a constant speed. The varying positions of the steering wheel angles were not consistent with the varying positions of the experimental road’s curvature at different speeds. This article proposes a series of curve feature distances that are modeled by multiple regression. These models reflect the relationship between feature distances of the experienced drivers and vehicle speed, the radius of curve as well as curve subtended angle. A trapezoidal steering angle model is generated using ideal steering angle and models of curve feature distances. To verify the human-like feature of the trapezoidal steering angle model, the calculated steering angles are compared with the actual steering angles on the test curve. The comparison results show that the modeled steering angle matches the actual steering angle well. Then, the trapezoidal steering angle model and the constant vehicle speed are used to plan the human-like reference trajectory which is tracked by the MPC. The simulation results show that the planned human-like trajectory can be tracked precisely.
Especially the proposed trapezoidal steering angle model is suitable for the two-lane curve with the radius of curve ranging from 100 m to 252 m, the radian of curve ranging from 0.506 rad to 1.741 rad, and vehicle speed ranging from 20 km/h to 50 km/h.
Footnotes
Acknowledgement
The authors would like to thank National Natural Science Foundation of China and Postgraduate Research & Practice Innovation Program of Jiangsu Province.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China [Grant Nos. 51675235 and 51605199] and Postgraduate Research & Practice Innovation Program of Jiangsu Province [Grant No. KYCX17_1812].