
Abstract
A method is presented for improving the localization accuracy of a mobile manipulator. The system consists of an industrial manipulator mounted on a mobile platform to perform fuselage drilling/riveting tasks in indoor environment. The localization is based on dual laser range finders mounted on the system and a number of artificial landmarks preset in the environment. Localization based on trilateration method is presented in this study. The adaptive unscented Kalman filter method is used to improve the accuracy of localization as well. The proposed method has been verified through experiments and the localization accuracy of mobile manipulator can be improved to 8 mm in most cases.
Introduction
Mobile manipulator is a mobile platform stocked with robotic manipulator which can be applied to commercial or industrial field. The mobile manipulator has already been employed in many fields, such as material handling, 1 assembling task, 2 transporting, 3 and so on. The localization issue is the most fundamental and critical one for mobile manipulator to accomplish the tasks. One of the challenges for localization is to suppress or remove the influence of the variable noise in the environment. 4,5
The localization accuracy is an important indicator for mobile manipulator. A number of approaches were taken to improve it. Röwekämper et al. 6 used the particle filters to improve localization accuracy of the robot by an integrated pose estimation system with precise path execution. Moreno et al. 7 provided Markov chain Monte Carlo algorithms combined with the differential evolution methods to efficiently solve optimization problems for global localization. Jiang and Xi 8 proposed a multi-sensor fusion method based on camera and laser range finder to enhance the accuracy of mobile manipulator. This method can obtain more environmental information so that the precise position can be acquired. To improve localization accuracy of the system, Mu et al. 9 presented an ultrasonic sensor scanning method based on a novel ultrasonic sensor ranging algorithm which was developed for the recognition of the inclined plate and obtained the location of the ultrasonic sensor relative to the inclined plate reference frame. Liu et al. 10 utilized the multiple sonar sensors by accumulating the sonar data to overcome the sparseness and uncertainty of sensor performance. Lin et al. 11 presented a method for robot to calculate its accurate location using graph-based optimization in indoor environment. Kim and Chung 12 designed a novel scan matching algorithm based on the laser range finder to improve the localization performance of a mobile robot in glass-walled environments. Yang et al. 13 proposed a method using the geomagnetic sensors to estimate the positions of mobile robots in indoor environment. Cho et al. 14 developed a measurement error observer to remove large errors caused by wall penetrating line-of-sight (LOS) signals and non-LOS signals in the process of localization, and this method used received signal strength indicator data of wireless local area network. Mi and Takahashi 15 used high-frequency-band radio frequency identification (RFID) module in order to determine the position in indoor environment. Mankotia et al. 16 proposed a localization algorithm based on Bluetooth which used iterative trilateration and Cuckoo search algorithm and implemented them in Monte Carlo simulation.
Kalman filter (KF) is a method to enhance the localization accuracy which was first presented by Schmidt. This method was used to predict the orbit in the Apollo Program. 17 Then KF was applied in the fields of control, guidance, navigation, and communication. Song et al. 18 used it for enhancing the navigation accuracy by fusing the gyroscope and encoder data. Chuang et al. 19 presented KF and fuzzy compensation which fused the data of magnetometer and gyroscope so that the localization accuracy can be improved. Liu et al. 20 proposed an algorithm that was the KF localization algorithm based on symmetric double-sided two-way ranging method for solving the problem of node localization. Wang et al. 21 presented the hybrid ultra-wideband Doppler system employing the KF to enhance measurement accuracy and improve system robustness. Ma and Wang 22 utilized KF by combining the rough location estimation and the instant velocity for RFID tracking to enhance the position estimation.
The drawback of KF is that Gaussian noise statistics is applicable to linear systems, while the practical systems are generally nonlinear systems. The unscented KF (UKF) method which was first proposed by Julier and Uhlmann 23 can be applied to nonlinear systems and is not limited to assuming that the distributions of noise sources are Gaussian. Liu et al. 24 proposed a modified UKF method for solving the less precision or divergence issue of time difference of arrival localization. This method judged whether the system states suddenly changed, and then introduced the suboptimal fading factor to the predicted covariance matrix for decreasing the error of state mutation. Kim et al. 25 used UKF method to improve the localization accuracy of system which included laser range finders, gyro, and encoders. The laser range finders calculated the absolute position of mobile manipulator, while the gyro and encoders provided the local information. Gao et al. 26 presented an optimal data fusion method based on the adaptive fading UKF method for the stochastic nonlinear multi-sensor systems. This method had a two-level fusion structure. The bottom-level structure used an adaptive fading UKF method based on the Mahalanobis distance to improve the adaptability and robustness of local state estimations against process-modeling error. The top-level structure utilized the principle of linear minimum variance to calculate globally optimal state estimation. Wang et al. 27 proposed an adaptively robust UKF method to reduce the effect of the dynamics model error and the measurement model error simultaneously. Bahraini et al. 28 proposed a new adaptive UKF (AUKF) algorithm with RGB-D sensors providing both RGB as well as depth information in order to improve the accuracy of SLAM (simultaneous localization and mapping), and an adaptive systematic search method was performed to find the suitable value for the scaling parameter and to improve the accuracy of estimation. Hong et al. 29 proposed AUKF algorithm combining data of odometer, ultrasonic position module, and electronic compass to decrease the effect of accumulated error caused by noise.
For the above research achievements, the methods are mainly based on natural landmarks or relative localization. In this article, the AUKF localization method based on artificial landmarks is presented for improving localization accuracy of mobile manipulator in indoor environment.
Problem formulation
The mobile manipulator with Mecanum wheels was developed in Shanghai University, as shown in Figure 1. This system includes a manipulator mounted onto a wheeled mobile manipulator. Two laser range finders that are placed on the right front and left rear of the system, respectively, are used to localize with preset artificial landmarks. In this article, the mobile manipulator can implement fuselage drilling or riveting tasks in the aerospace manufacturing field. 30 –36

Wheeled mobile manipulator developed in Shanghai University.
The coordinate systems are established on the mobile manipulator. As shown in Figure 1, the coordinate systems include the world coordinate system
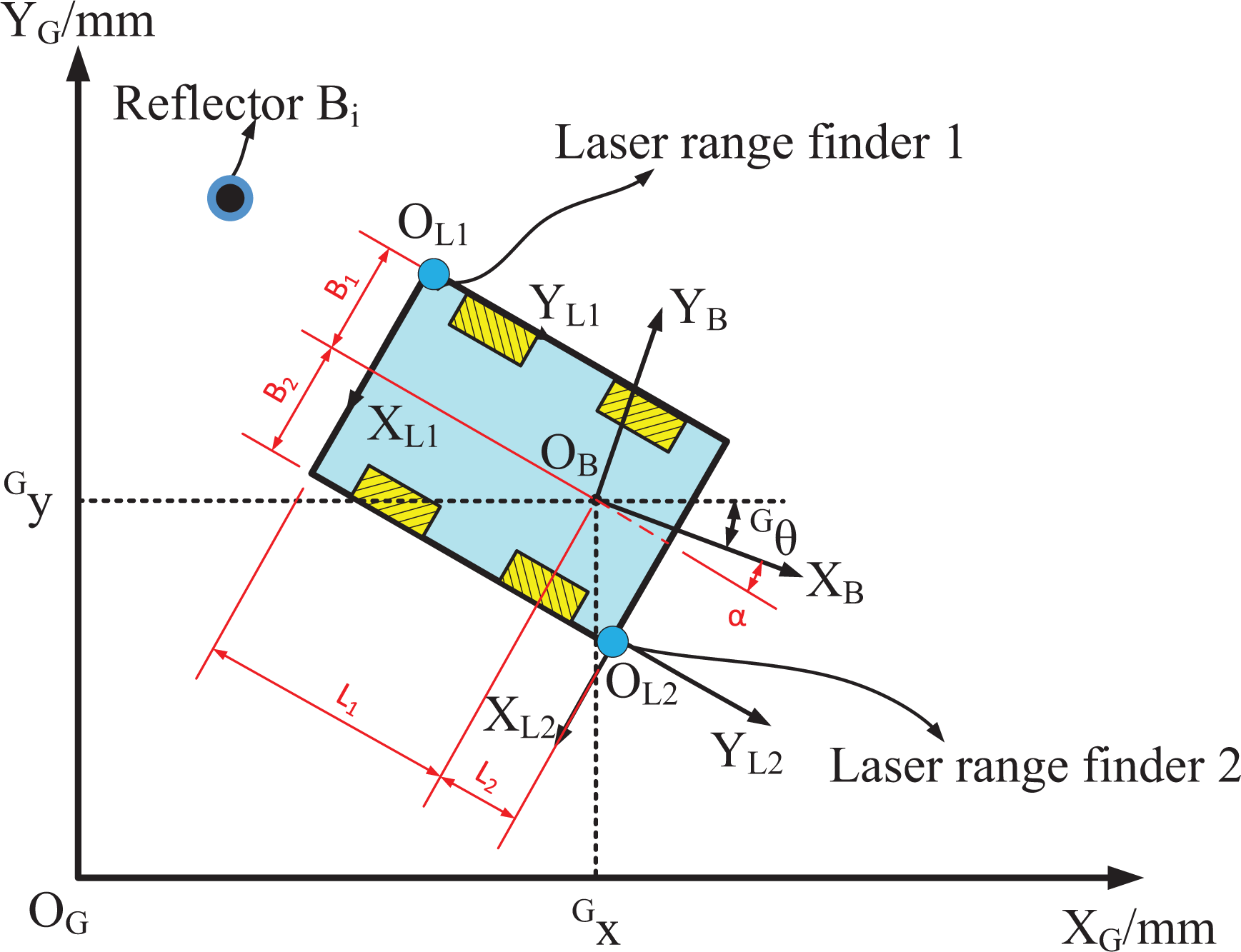
Coordinate systems of the mobile manipulator.
The position and pose of the mobile manipulator in the world coordinate system can be defined as equation (1)

where
In Figure 2, B
1, B
2, L
1, and L
2 represent the distance from the dual laser range finders to the center of base of manipulator, and α represents the angle between the positive XB
of
When the laser range finders are applied, the localization accuracy of the system cannot be high because of environmental noise, mechanical vibration, or system error. 37,38 Particularly, the localization accuracy is greatly affected by environmental noise.
Modeling of localization based on reflectors
Localization can be classified into absolute or relative localization. The latter one has an accumulated error, while the former one does not. For absolute localization, it is a common way that many reflectors preset in the environment as landmarks which can be identified and measured accurately. In this research, the feature of each reflector will be extracted from the collected data. The feature extraction algorithm composes of three steps: (i) preprocessing raw data, (ii) clustering and identifying, and (iii) feature extraction.
Preprocessing raw data
In this step, a set of ordered data sequences

Clustering and identifying
Clustering which classifies different objects is the fundamental step before identifying. If the distance between adjacent scanned points is shorter than the threshold δ, these points will be assigned into a cluster. Considering that measurement errors of laser range finders are relevant to the measured distance, an adaptive clustering method 39 is employed. The threshold δ is defined as below equation


where δ composes of

Geometric diagram of the threshold.
Identifying reflectors can be implemented by the intensity threshold of object and diametral threshold of reflectors in this study.
After clustering, the data sets include two kinds: reflector sets and non-reflector sets. In equation (5), to identify cylindrical reflector, the diameter of measured reflectors D is constrained in the interval

Feature extraction
After identifying, a set of reflectors of which center point is denoted by


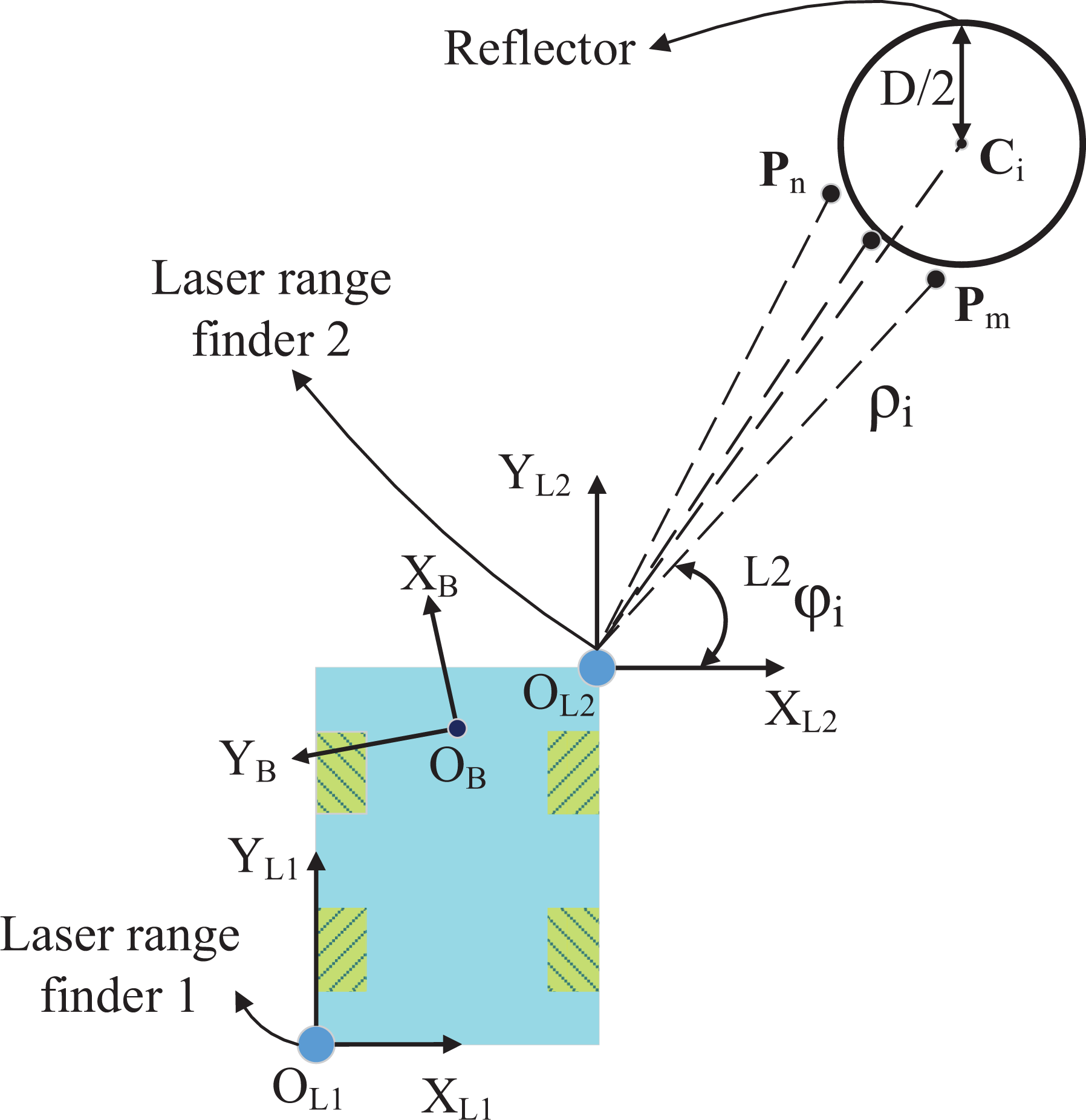
Extraction of the center of the cylindrical reflector.
In Figure 4, both
Localization based on trilateration method
A series of
The trilateration method is used for localization. As shown in Figure 5(a), theoretically, three circles can intersect at one point. However, for the error factor of the measurement, these circles do not usually intersect at one point, as shown in Figure 5(b). In Figure 5(a),

(a) The theoretical situation and (b) The actual situation.
The least squares estimation principle is applied to determine the intersection point.

where:


The position of system
The azimuth angle


Modeling of localization with AUKF method
Localization with UKF method
Owing to environmental noise, mechanical vibration, system error, and locational error of the reflectors, the localization accuracy of mobile manipulator is poor in the abovementioned method. The AUKF method is utilized to improve localization accuracy.
For nonlinear state-space models, UKF method can be used to accurately acquire the posterior mean and covariance to the second order or third order of Taylor series expansion.
The state-estimation involves equation of state and equation of measurement for KF. The equations are defined as


where
The position state of the reflectors


When the system noise is nonzero mean, equations (13) and (14) can be expressed in the following form equivalently

where
The following step introduces unscented transformation (UT) into UKF method. The UT selects seven sample points (sigma points) to predict the position state of the reflectors at the next moment.
To calculate the estimate value of the position state at k time, the sigma matrix



where ξ is a scaling parameter. κ is also a scaling parameter and usually set to 0. 41 ψ is usually set to a small positive value and is to control the distribution of the sigma points. 42
The corresponding weight

where ν is applied to incorporate prior knowledge of the distribution of the position of the reflectors.
For the convenience of expression, the process of UT can be replaced with equation (22)

where D represents the dimension of the position state of the reflectors.
As shown in Figure 6, the process of UKF method consists of prediction phase and update phase. The prediction phase can be divided into four steps.

The flow diagram of UKF. UKF: unscented Kalman filter.
The first step of prediction phase calculates the sigma matrix

The second step of prediction phase calculates the priori estimate

The third step of prediction phase is the correction step. In correction step,

The last step of prediction phase calculates the observed predictive value

In Figure 7, the process of specific calculation is shown for equations (24) and (26).
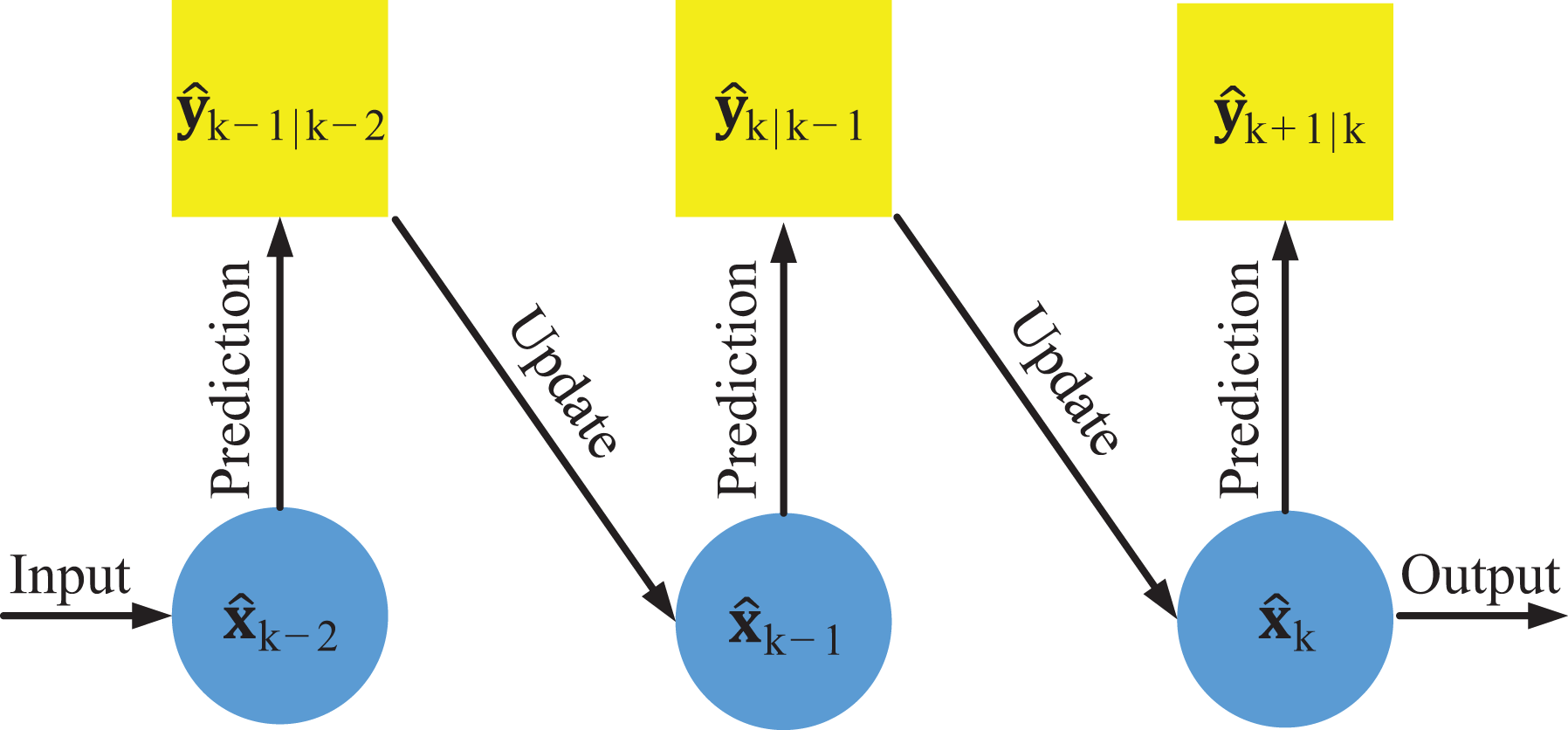
According to the prediction phase, the process steps of update phase can be obtained as follows



where
The localization accuracy with reflectors can be improved by UKF method from the above steps.
Localization with AUKF method
The traditional UKF method is used to solve the issue when the prior statistical characteristic of the noise is known. However, it is unknown in most cases. At this time, the estimation accuracy of the mobile manipulator will be reduced, and the filtering results may diverge. The AUKF method based on maximum a posterior estimation and exponential weighting fading memory is introduced.
The exponential weighting value dk satisfies the following condition at k time

where b is forgetting factor, and 0 < b < 1. b is set as 0.98 in this article.
The estimated means of noise

where
The estimated means of noise

where
Experiment
In this research, the scanning range of laser range finder is from 0° to 270° and the angular resolution is 0.25°.
In this article, the localization of mobile manipulator is divided into two steps. The first step is coarse localization with dual laser range finders, and the second step is precision localization 43 with the industrial camera which is mounted on the front of system with one calibration panel preset on the fuselage. The precision localization step requires the mobile manipulator to move to a position with small tolerance so that the calibration panel can be caught by the camera. Based on the industrial camera parameters, this tolerance is small, so the improvement of coarse localization accuracy is important in the whole process.
In the experiment, three cases with different number of reflectors are considered. The number is three, four, and five, respectively. Taking five reflectors as example, as shown in Figures 8 and 9, the nominal positions of five reflectors are (2235,282), (1945,0), (0,0), (0,1055), and (245,1720) in the world coordinate system, and the unit is millimeter. All nominal positions are obtained by OptiTrack® in the experiments. OptiTrack is a highly accurate motion capture system while no less than three markers mounted on reflectors or lasers are captured by at least two cameras simultaneously, and the measurement accuracy of OptiTrack can reach submillimeter level. In addition, OptiTrack is applied to validate experimental data in this article.

Experimental mobile manipulator.

Experiment setup.
The positional relations between the dual laser and the base of the manipulator can also be measured by OptiTrack and defined as follows

where
The localization data were obtained at 20 different positions. The nominal coordinates of these positions are listed in Table 1.
The nominal coordinates of mobile manipulator in the world coordinate system.

Three experiments for each case were carried out. One is not to use any filter method, and the other is to use KF method or AUKF method. The error of localization can be obtained from the nominal position and the actual position. In Figure 10, the nominal positions are shown as the center points of all circles, while the radius represents the error of localization. It can be seen that the AUKF method localizes more accurately than the other two cases.
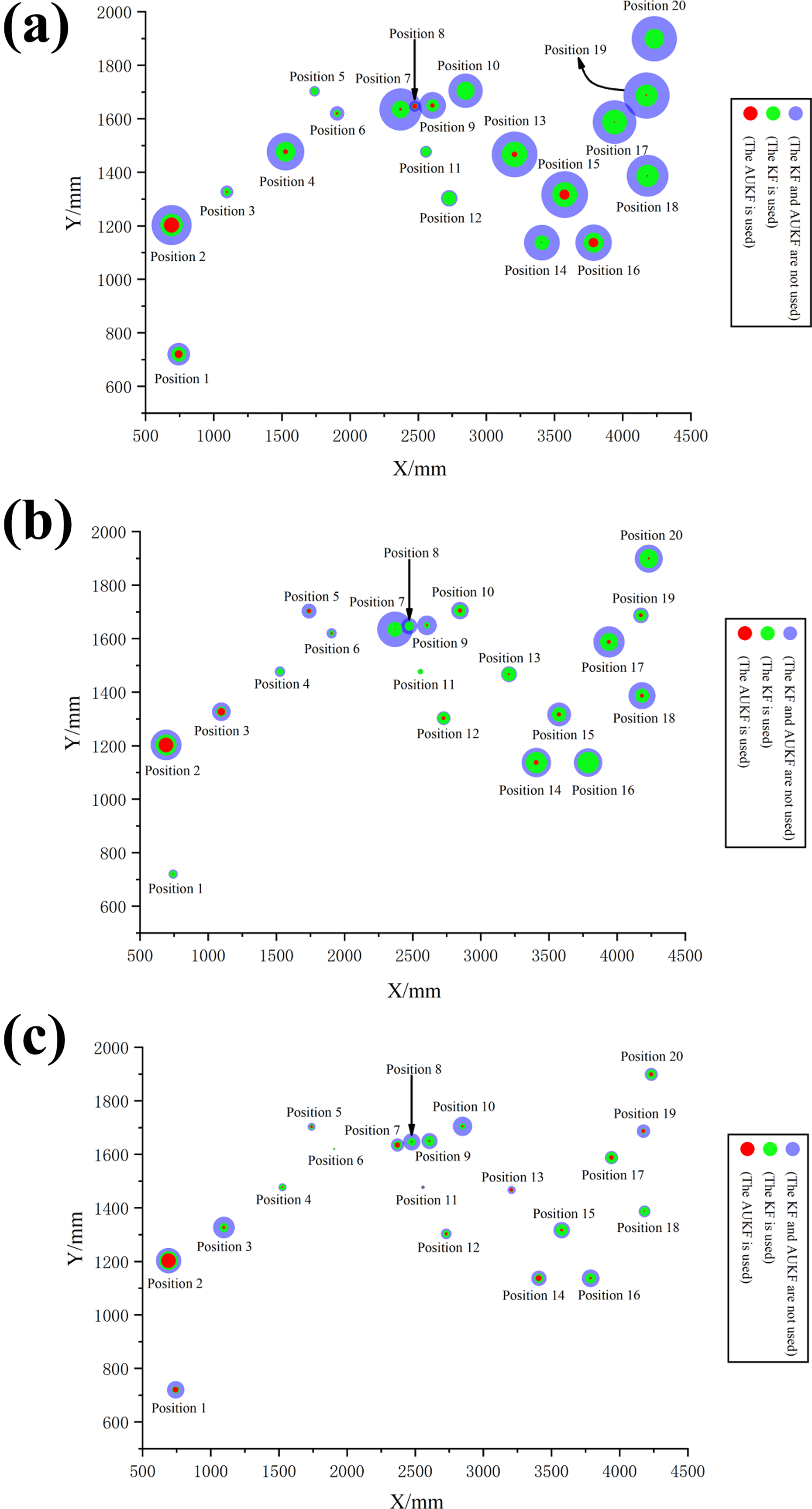
The localization error of mobile manipulator. (a) The localization through three reflectors. (b) The localization through four reflectors. (c) The localization through five reflectors.
The localization error of different cases is listed in Table 2. The purple circle represents the case without any filter. The green circle represents the case with KF, and the red circle represents the case with AUKF method. According to the results, it can be seen almost every position, and AUKF method can significantly improve the localization accuracy, that is, the radius of red circle is smaller than green one or purple one. From another perspective, AUKF method can reduce the impact of the number of reflectors onto the localization accuracy. Under the circumstances, there was no correlation between the accuracy and the number of reflectors.
The values of localization error in Figure 10.

It can be seen from Table 2, the accuracy can be improved to 8 mm except position 2 with AUKF method in most cases. It is mainly because the mobile manipulator is too close to the reflector (0, 1055) mm at position 2. It can be seen in Table 3, the distance between the mobile manipulator and this reflector is only 706 mm at position 2.
The distance between the mobile manipulator and the reflector (0, 1055; mm).

The maximum error of AUKF localization method is 19.1 mm, while the error of KF method is 31.8 mm, and the method without any filter is 58.5 mm. AUKF method can improve the localization accuracy of mobile manipulator with reflectors.
Conclusion
In this article, a method for improving localization accuracy of mobile manipulator used for fuselage drilling/riveting is presented. This article proposes an algorithm based on AUKF method to improve the localization accuracy with artificial landmarks. The model of AUKF method has been established, and the experiments are carried out in the real scenes. Through the experiment results, it can be found that, in most cases, the AUKF method can improve the localization accuracy of mobile manipulator compared with KF method or no filter method. In the future, the robustness of feature matching will be increased and this AUKF method will also be used in the localization with nature landmarks.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China grant no. 61803251 and the Shanghai Municipal Science and Technology Commission grant no. 17511107801.