
Abstract
Robots are coming to help us in different harsh environments such as deep sea or coal mine. Waste landfill is the place like these with casualty risk, gas poisoning, and explosion hazards. It is reasonable to use robots to fulfill tasks like burying operation, transportation, and inspection. In these assignments, one important issue is to obtain appropriate paths for robots especially in some complex applications. In this context, a novel hybrid swarm intelligence algorithm, ant colony optimization enhanced by chaos-based particle swarm optimization, is proposed in this article to deal with the path planning problem for landfill inspection robots in Asahikawa, Japan. In chaos-based particle swarm optimization, Chebyshev chaotic sequence is used to generate the random factors for particle swarm optimization updating formula so as to effectively adjust particle swarm optimization parameters. This improved model is applied to optimize and determine the hyper parameters for ant colony optimization. In addition, an improved pheromone updating strategy which combines the global asynchronous feature and “Elitist Strategy” is employed in ant colony optimization in order to use global information more appropriately. Therefore, the iteration number of ant colony optimization invoked by chaos-based particle swarm optimization can be reduced reasonably so as to decrease the search time effectively. Comparative simulation experiments show that the chaos-based particle swarm optimization-ant colony optimization has a rapid search speed and can obtain solutions with similar qualities.
Introduction
Waste management plays an import role in environmental protection, energy reuse, sustainable development, and people’s daily life. Landfill site is the crucial component in the waste management process with the functions of organizing, burying, or even cleaning and reusing the garbage. However, due to the fact that the kinds of waste are very complex and some of them may be harmful to people, landfills pose a serious threat to the staff working in them and the residents living near them. 1 Even worse, arisen from the chemical reactions of the waste burying underground, harmful gas would be generated and groundwater may be polluted. Therefore, pipes are constructed in many landfills to capture and analyze the gas. In our project, a real landfill in Asahikawa, Japan, is modeled as a traveling salesman problem (TSP) on the basis of actual situation: pipes distributed in the landfill and the robot with complicated sensors 2 needing to traverse them. This robot is required to deal with inspections by solving the TSP, then generating suitable paths. In the landfill, all the pipes and anchor points are in a wireless sensor network with terminals which support broadband signals and basic data transmission. Another matched terminal is also embedded in the robot. By this equipment, the robot is able to perceive the direction, distance, and location of the next point in TSP route. These would be the inputs for proportional–integral–derivative or neural network-based controllers. Then, the controller can generate the angle, velocity, and accelerated velocity for actuators. In this context, we introduce an improved ant colony optimization (ACO) to solve the TSP, enabling the robot to find the feasible route, travel around the landfill, and fulfill the task appropriately.
ACO 3,4 has shown excellent performance on several combinatorial optimization problems such as scheduling problem, 5 –7 assignment problem, 8 network coding problem, 9 and the path planning tasks for robots or unmanned aerial vehicles. 10 The determination of parameters for ACO is an extremely important task which is closely correlated with the algorithm’s solving ability. Scholars all around the world carried out several research works on the parameter tuning issue for ACO. Gambardella and Dorigo adjusted the status transition parameter q 0 (in ant colony system) according to the problem size 11 ; Favuzza et al. also regulated q 0 by iteration number 12 ; and Watanabe and Matsui tuned the search region by an adaptive swarm-size-adjustment method. 13 In particular, some researchers try to employ particle swarm optimization (PSO) 14 to optimize the parameters for ACO, and some achievements have been obtained. 15 –17 These improved ACOs can effectively deal with lots of practical problems represented by TSP and path planning tasks. 18
In algorithms like ACO optimized by PSO, 14 genetic algorithm (GA), 19 or other swarm intelligence techniques, 20 due to the fact that ACO needs to be invoked by another algorithm many times, the search time is relatively long especially in some TSP instances with a large number of nodes. For a robot path planning problem, we often need a quick response and a shorter execution time. The inner mechanism of those approaches mentioned above 15 –17 are almost the same. In this method, ACO parameters are optimized by PSO and classical pheromone updating strategy is used. That is, the accumulation status of pheromone on the map regarding to each ACO parameter set would be cleared again and again in the evolutionary process of PSO. This may lead to the loss of global information and a long-time offline optimization. We try to use global information more sufficiently by introducing an improved pheromone updating strategy. That is recording the pheromone status on the map and reusing them during the optimization instead of clearing them. We call it “asynchronous strategy.” This method is also enhanced by “Elitist Strategy” which means emphasizing the influence of the best ant (the individual with the current shortest solution). In addition, the use of chaotic sequence can improve the performance of PSO random factors due to its randomness and ergodicity. This hybrid algorithm can significantly reduce the iteration number of ACO invoked by each particle in PSO, thereby shortening the algorithm’s running time.
This article is organized as follows. In the second section, related works such as path planning, TSP, ACO, and PSO are described briefly. The proposed hybrid chaos-based particle swarm optimization (CPSO)-ACO algorithm is elaborated in the third section. For details about the practical scenario, the landfill inspection task of a robot is illustrated in the fourth section. This task is solved by CPSO-ACO model. Comparative simulation experiments are carried out in the fifth section. The conclusion is given in the last section.
Related work
Path planning
Path planning is an important problem in robotics area. In this task, a safe and appropriate route should be obtained for the robots automatically. According to the actual needs of different tasks and specific robot situations, 21 the planner should obtain a suitable path online or offline.
Generally, the bodies and transformations of robots would be modeled at first. The representation of robotic space is closely correlated with graph-based modeling and searching. Common geometric modeling strategies include grid method, 22 visibility graph method, 23 and Voronoi diagram method. 24,25 Wybe Dijkstra, 26 A*, 27 D*, 28 and artificial potential field 29 methods are typical graph search algorithms.
Sampling-based methods can be regarded as the mainstream approaches which are widely utilized in many real-word motion planning applications. 30,31 Instead of constructing explicit configuration space, sampling-based algorithms design a number of samples and consider the collision detection as a black box, thereby determining the motion trails in grids or other geometric space. 22,24 Typical sampling-based methods include probabilistic road-map method (PRM) 32 and rapidly-exploring random trees (RRTs). 33
Another group of methods are based on model and optimization. 34 Some of them utilized linear optimization or continuous optimization to generate the path, for example, convex optimization. 35 Others adopted heuristic algorithm to solve combinatorial optimization problems. Heuristic algorithm for combinatorial optimization is the main topic of this article.
Mostly, the heuristic computation methods use techniques arisen from artificial intelligence, such as machine learning algorithms 36 and evolutionary computation algorithms. 19 Some popular intelligent computation algorithms such as GA 19 and PSO 14 are regarded as the most effective group of strategies for combinatorial optimization problems. These strategies can also effectively deal with lots of control tasks for robots such as their gestures and actions. 37 If we can transform the path planning task into some constrained optimization problems, those heuristic intelligence techniques can effectively solve the path planning issue. In this article, path planning problem is exactly converted into the typical NP-hard combinatorial optimization problem, TSP.
There are also case-based methods which try to generate the path by prior knowledge. 38 In this strategy, existing environment and route information should be collected as a “case library.” With this case library, the planners will match the current task to some existing tasks, then generate the new paths and combine or adjust them. 39
Traveling salesman problem
TSP is a classical problem in operational research and mathematical area. In this problem, a sale man needs to travel around a number of cities. All the cities should be traversed only one time. Each path between two points is defined clearly. An appropriate solution for this problem would be a traveling route, or in other words, a sequence of city serial numbers. Ideally, the best solution of TSP is the route with the minimum cost, normally the shortest sum-distance of the route. The major variants of TSP include asymmetric TSP and multiple traveling salesmen problem.
ACO is regarded as the most effective method for TSP. 11,40 In these years, with the significant development of deep learning techniques, some researchers try to use deep neural networks to deal with combinatorial optimization problems represented by TSP and they also obtain valuable achievements. However, since most neural networks-based strategies 41 need the gradient to train models and most non-deterministic polynomial complete problem (NP) like TSP do not have mathematical expressions, these methods often have weak generalized performance. It is reasonable to believe that heuristic methods or the evolutionary computation methods are still the mainstream methods for combinatorial optimization.
ACO
Inspired by the foraging behavior of ants, ACO can excellently deal with lots of optimization tasks including TSP. During the search process for food source, ants can exchange information between each other by releasing the pheromone. Assuming that the amount of pheromone released by one ant is limited, the pheromone left on edge [i, j] is normally less in a long route and more in a short route. After a number of round trips, the colony of ants can intelligently choose those routes with more pheromone and higher fitness.
Take the basic model, ant system algorithm as an example, each artificial ant corresponds to one route, or a city sequence. Each city appears only one time in this sequence. At the beginning, we can initialize the ants randomly. During the evolutionary process, the ant k can determine its next city j from the current city i by the following formula

where

where

where ρ is the evaporation coefficient.

where Q is total amount of pheromone, Lk is total length of the tour (route) k, and K is the number of ants.
The total amount of pheromones, Q, is major related to the environment such as the number of cities and the total distance. It can be determined by experiments. The number of cities is also the major factor which affects K (AntCount). Based on the past experience, AntCount can be determined among 0.5 to 1.5 times the number of cities.
According to the formulas above, ant colony can update from one generation to another until they obtain the appropriate solution.
Based on ant system model, other improved modes represented by ant colony system 42 and max-min ant system 43 are proposed, respectively. In these years, ACO is also widely applied in topology optimization for complex nets and track planning for unmanned aerial vehicles or robots. In ACO models, the determination of hyper parameters directly impacts their performances including intensification and diversification in the search process.
PSO
Similar to ACO, PSO is another useful bioinspired algorithm. 14 This algorithm mainly imitates the behavior of birds. In this algorithm, the individuals (bird or particle) search the better solutions in local area. These particles need to cooperate and compete with each other so as to make sure the colony can move to the global optimal solution gradually.
In PSO, we can initialize the ith solution xi
as an N-dimensional set

where
When the velocity is determined, we can get the position of particle i as below

After a number of iterations as mentioned above, this group of particles will be close to the global optimal solution.
Apart from function optimization, PSO is also regarded as one of the most effective parameter optimization methods for mainstream machine learning and evolutionary computation models such as support vector machine (SVM) and ACO.
Hybrid CPSO-ACO algorithm
Previous PSO-ACO algorithm
Generally speaking, the common PSO-ACO model for TSP can be summarized as Algorithm 1.
PSO-ACO.
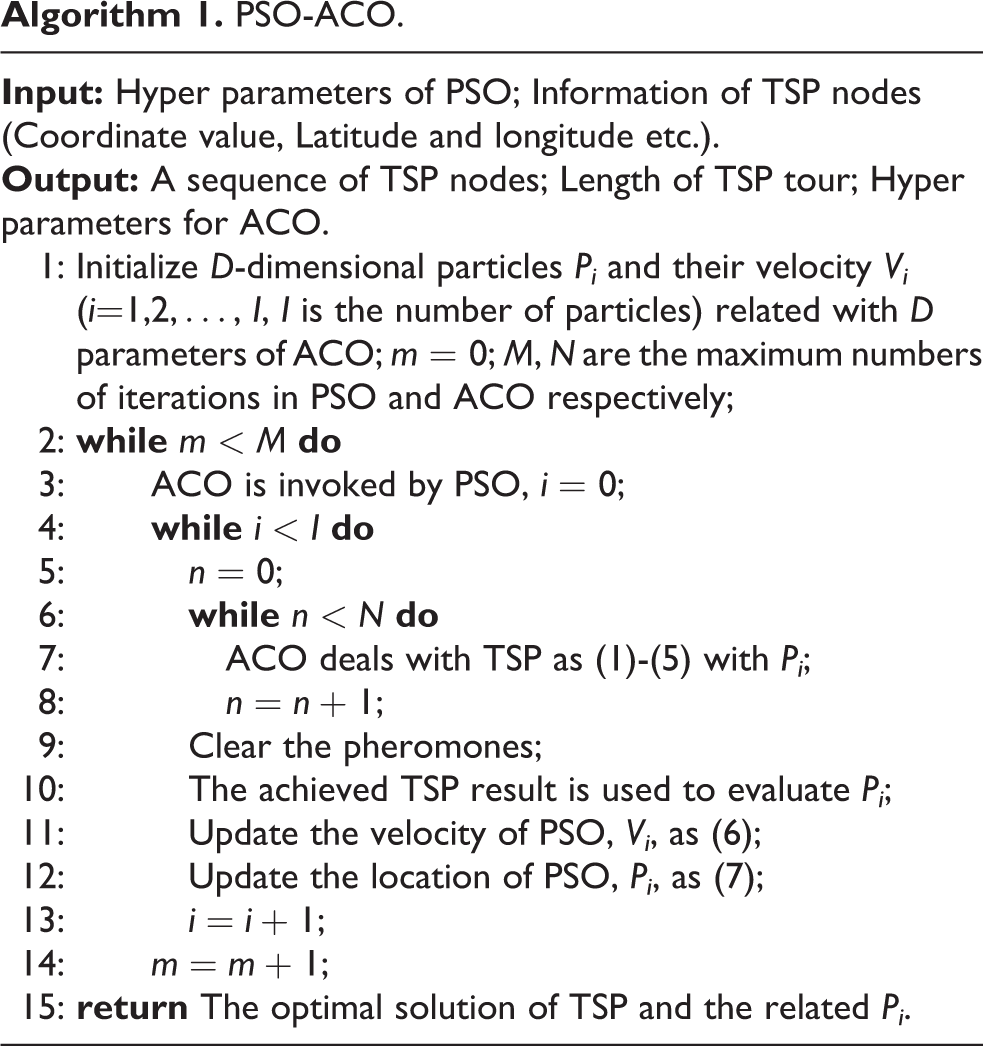
In Algorithm 1, time overhead for a complicated TSP which needs a certain number of ACO cycles would be very large. In this article, we try to reduce the algorithm running time based on the improvements as follows: asynchronous pheromone updating strategy and chaos-based PSO optimization.
Improved pheromones updating method: Global asynchronous method combined with “Elitist Strategy”
In previous PSO-ACO, pheromones in the TSP map will be cleared when particle Pi
(also the parameter set for ACO) is changed into
The asynchrony denotes that the pheromones could be kept stable instead of updating if the algorithm does not find a better solution as below equation

where
If the algorithm gets a solution with better fitness after n iterations, the pheromone updating formula can be written as

where

where Gk is the length of the globally best tour (the shortest route).
The introduction of chaos
Generally, chaos refers to a random-like and unpredictable dynamic system which is constituted by a series of states. A chaotic variable normally has features as follows: It is sensitive to the initial value. The states are random and unpredictable. The variable will experience all the states as certain patterns in a limited range.
The ergodicity and randomness of chaotic systems can help PSO to improve search performance and avoid local optimum. There are many chaotic PSO methods. The model in the work of Alatas et al.
45
initialized particles by chaotic sequences; Daneshyari
46
generated random factors in PSO; Liu et al.
47
utilized chaotic search for particles with high fitness in PSO. Among these methods, generating factors (such as the random number in equation (6)) are most common and simplest way.
48
Typical discrete chaotic maps include logistic map,
49
tent map,
50
Chebyshev map,
51
and so on. Compared with logistic and tent maps with the distribution range from 0 to 1, Chebyshev map has a wider distribution, from −1 to 1. In this article, two Chebyshev chaotic sequences are employed to produce the random factors
The Chebyshev mapping model with degree n can be demonstrated as follows

Then, we can obtain the recurrent equations as below




The new velocity updating formula can be written as follows

where
Hybrid CPSO-ACO model
The proposed hybrid CPSO-ACO algorithm can be illustrated as Algorithm 2.
Hybrid CPSO-ACO.

Different from Algorithm 1, pheromones in the map are relatively stable in Algorithm 2. N is the number of cycles corresponding to a particular particle Pi and it can be reduced significantly with the improvements such as asynchronous pheromone updating strategy and chaotic random factors introduced in this section.
Experimental analysis on Ch150 problem
We carried out a group of experiments using PSO-ACO (algorithm (a), also Algorithm 1 in section “Previous PSO-ACO algorithm”), PSO-ACO with asynchronous updating method (algorithm (b)), and hybrid CPSO-ACO algorithm proposed in this article (algorithm (c), also Algorithm 2 in section “Hybrid CPSO-ACO model”) to evaluate the improvements in this article. All these three algorithms are utilized to deal with typical TSP instance, Ch150 problem from TSPLIB presented by Heidelberg University (Universitaet Heidelberg). 52 Ch150 is symmetric Churritz TSP with 150 cities which are recorded as 150 coordinate points and measured by two-dimensional (2-D) Euclidean distance. The optimal solution on Ch150 is 6528 so far.
As analyzed in the second section,
Statistical results on Ch150.

As shown in Table 1, algorithms (a) and (c) obtained the same shortest route which is better than algorithm (b). Algorithm (c) has a better average route length but a weaker stability than algorithm (a). The running time of algorithms (b) and (c) is far less than algorithm (a). Compared with previous algorithms, the proposed CPSO-ACO model can improve the solution quality to some extent and reduce the running time significantly.
The optimal routes obtained by these three algorithms are demonstrated in Figures 1 to 3.

The shortest route obtained by algorithm (a).

The shortest route obtained by algorithm (b).

The shortest route obtained by algorithm (c).
As shown in these figures, crossover situation appears in all the routes and algorithm (c) archived a better solution than algorithm (b).
Path planning for landfill inspection robots in Asahikawa, Japan
The proposed hybrid CPSO-ACO model is applied to deal with path planning task of landfill inspection robot in Asahikawa, Japan. 53,54 It should be mentioned that in this work, considering chassis height of the car-like robot and actual road conditions, we deal with the problem as an ideal TSP. The main constraint of CPSO-ACO is that the robot can only inspect each pipe just once during one optimization. In our future work, we will take more considerations on other constraints like terrain restrictions on special regions, time and energy consumption constraints, and so on.
This landfill is built on a hill with 109 gas pipes in order to release and deal with the harmful gases underground. For the purpose of detecting gas composition (some of them may be dangerous to human) in different regions, the robot needs to traverse all the pipes in the landfill by certain control strategies 55 designed appropriately. A lower cost is expected. That is, the length of robot route is the shorter the better. Details of this project and relative node information are recorded. 53,54 We got those three-dimensional (3-D) coordinate values from local documents and maps.
Traversing all the pipes is the major assignment of the robot. It has the same aim and role as the salesman in TSP. In addition, there is no obvious obstacle in the landfill for our robot since it is designed like a mobile vehicle with a higher chassis. Moreover, after leveling and compression, the path between two pipes is relatively smooth. This is the reason why our environment can be transformed into TSP. We just use the Euclid distance between every two nodes in the 3-D space at present. The calculation formula is written as below

where
Then, path planning task can be transformed into a 3-D TSP problem, as shown in Figures 4 and 5. In the further work, we will consider more factors such as the slope friction and robot poses so as to fitting the real environment more appropriately. 18,56
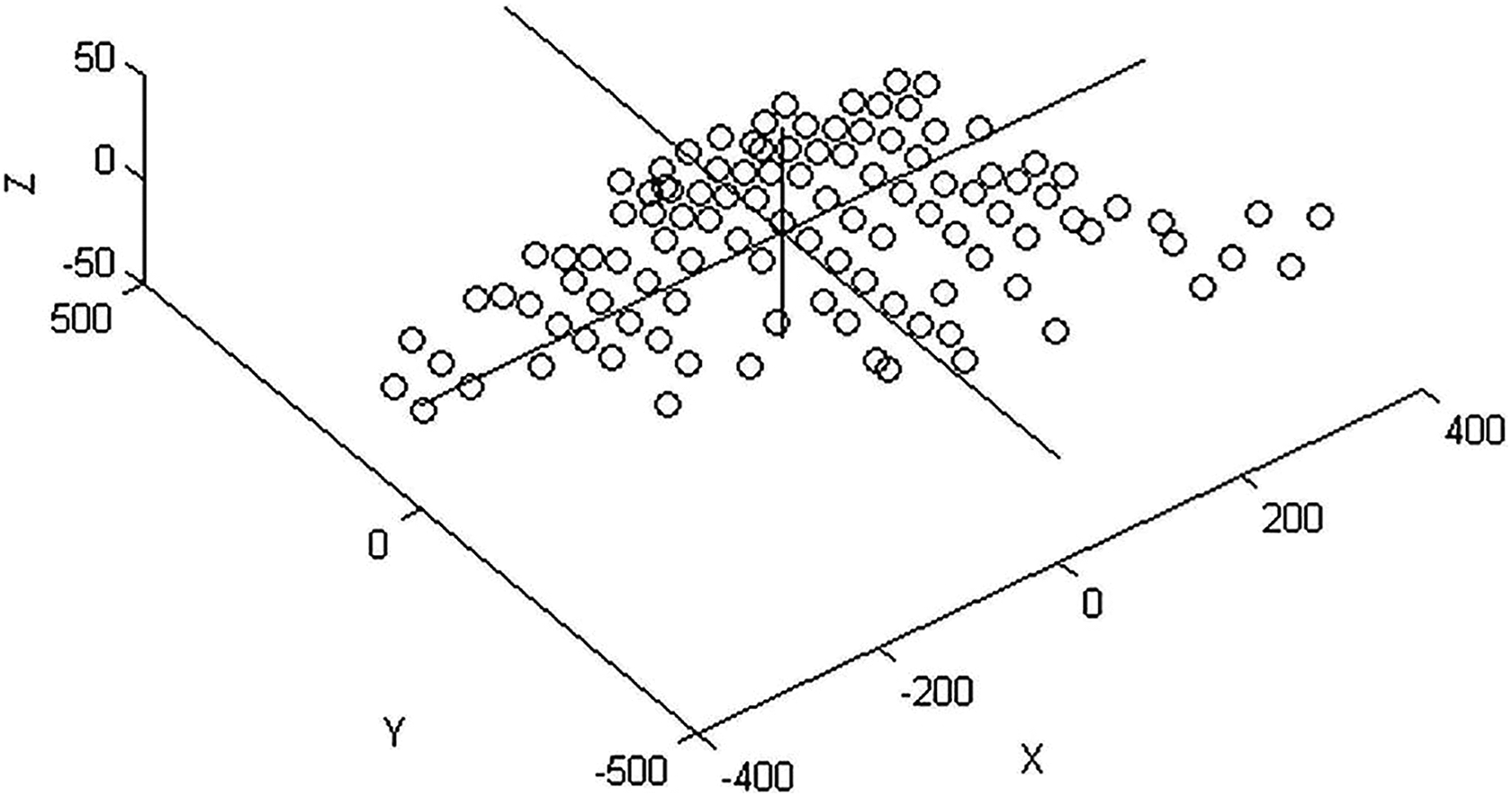
TSP representation of the landfill environment (3-D view). TSP: traveling salesman problem; 3-D: three-dimensional.
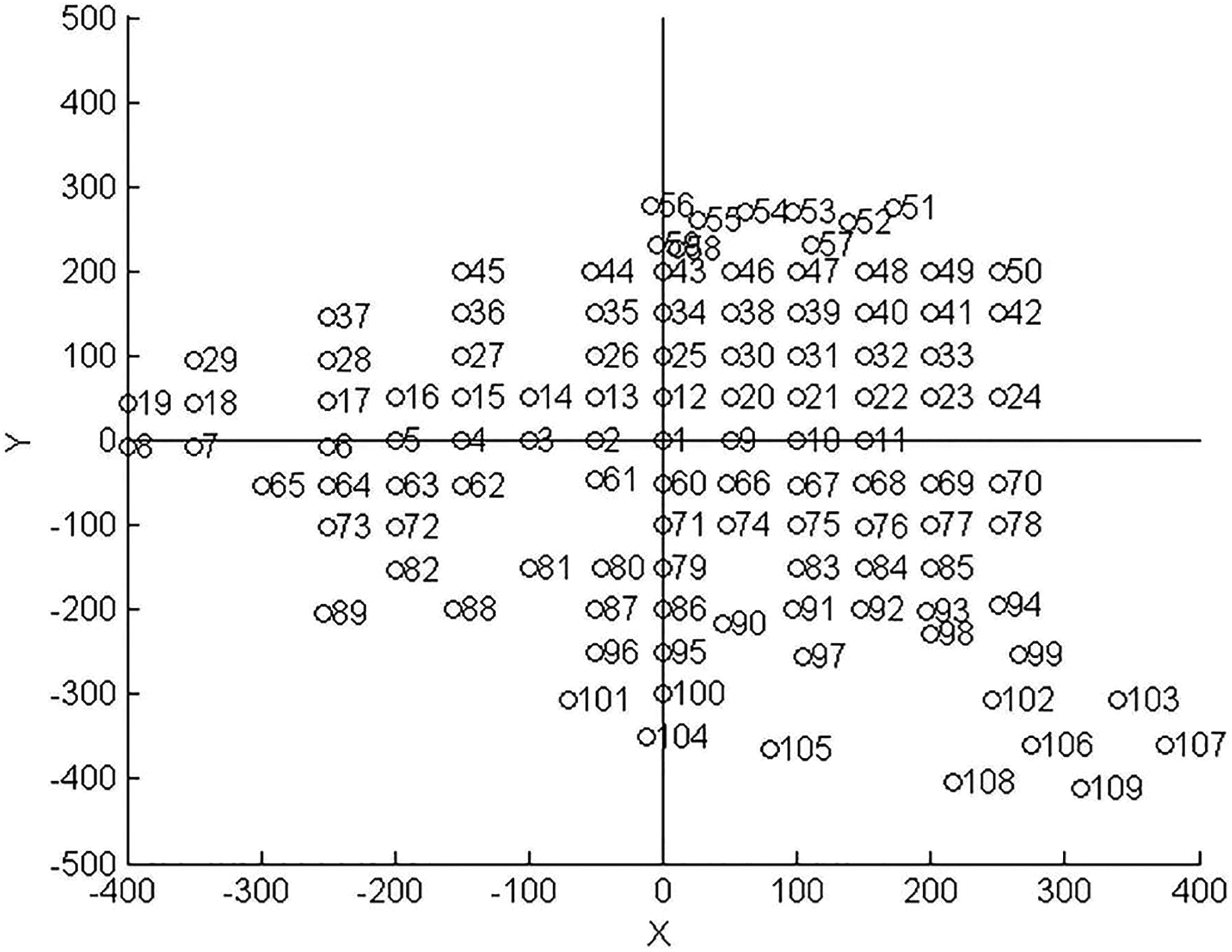
TSP representation of the landfill environment (2-D overlooking view). TSP: traveling salesman problem; 2-D: two-dimensional.
In this project, we optimize three ACO parameters:
The number of PSO parameters is less than ACO. Generally speaking, a minute change in PSO parameters has a relatively small impact to its performance. In the CPSO-ACO model, ParticleCount = 3,
We use the same development environment as mentioned in the third section, Visual Studio 2010 on a 32-bit windows 7 system. All the experiments are carried out on a PC with Intel core (TM) i5 CPU @ 2.4 GHz processor and 2 GB RAM. Each group of experiments is repeated five times. The statistical results are listed in Table 2.
Simulation results obtained by proposed CPSO-ACO.

CPSO-ACO: chaos-based particle swarm optimization-ant colony optimization.
As shown in Table 2, the length of the shortest route achieved by CPSO-ACO is 6163.06. The relative serial numbers are: 57-52-51-53-54-55-56-59-58-43-34-38-46-39-31-30-25-26-35-44-45-36-27-15-16-17-28-37-29-18-19-8-7-65-64-6-5-4-62-63-72-73-89-82-88-81-80-79-71-74-66-60-61-2-3-14-13-67-75-76-84-92-91-83-97-90-86-87-96-101-95-100-104-105-108-106-109-107-103-102-99-94-98-93-85-77-78-70-69-68-11-10-9-1-12-20-21-22-23-24-33-32-40-41-42-50-49-48-47. This optimal route is shown in Figures 6 and 7.

The optimal route obtained by proposed CPSO-ACO (3-D view). CPSO-ACO: chaos-based particle swarm optimization-ant colony optimization; 3-D: three-dimensional.

The optimal route obtained by proposed CPSO-ACO (2-D overlooking view). CPSO-ACO: chaos-based particle swarm optimization-ant colony optimization; 2-D: two-dimensional.
Comparative study
In order to evaluate the performance of proposed CPSO-ACO model, two groups of experiments are conducted in this article with similar search time scales or similar search qualities, respectively. The algorithms in the study by Min et al. and Xia et al.
15,16
are selected as the comparisons.
The major promotion of CPSO-ACO model is that the iteration number of ACO invoked by PSO can be reduced greatly on the condition that asynchronous pheromone updating method and chaos sequence are introduced.
For those TSPs with a large number of nodes, the advantage would be more obvious since more cycles are needed to perceive global environment in previous PSO-ACO. According to the complexity of the problem, dozens or even hundreds of cycles would be used in PSO-ACO models proposed by Min et al. 15 and Xia et al. 16 In our CPSO-ACO model, the ACO cycle number, N, can be reduced significantly.
Similar search qualities
We use the same experimental setup as mentioned in the third section; the parameters are set as Table 3 (as analyzed in the second section); all the experiments are repeated five times. For
Parameter setting (similar search qualities).

Experimental results are recorded in Table 4. The average running time of
Experimental results of four algorithms (similar search qualities).

Similar time scales
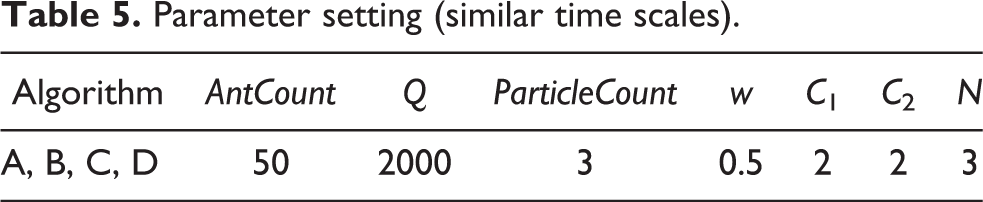
Another group of experiments is also carried out in similar time scales. Parameters are set in Table 5. Especially, N is set at 3 for all the four algorithms. By setting as this, the running time of
Parameter setting (similar time scales).
Statistical results are recorded in Table 6. As shown in Table 6, the average length of the route obtained by
Experimental results of four algorithms (similar time scales).

As mentioned above, the proposed algorithm can reduce time cost effectively. In the similar running times, it is able to improve search quality.
Conclusion
According to actual situation, a real robot path planning task in landfill harsh environment is transformed into a 3-D TSP which is solved by the proposed algorithm: CPSO-ACO. Compared with previous PSO-ACO, there are two improvements in CPSO-ACO: (1) Novel pheromone updating method, global asynchronous method combined with “Elitist Strategy,” is applied in ACO; and (2) PSO random factors are generated by Chebyshev chaotic sequences.
Experimental results show that the proposed CPSO-ACO has two characteristics in the performance on TSP task: (1) Keeping acceptable solution quality, it can reduce running time outstandingly; (2) It can obtain better solutions on the same time scale.
The further work about this article can be conducted as follows: (1) the algorithm could be further improved by introducing more heuristic information and adaptively adjusting certain parameters like w; (2) more practical factors such as slope, friction, and robot poses should be considered so as to fit the environment appropriately; (3) several advanced machine learning strategies such as statistical learning 57 and reinforcement learning 58 could be introduced; (4) more mathematical analyses could be carried out for the proposed method in order to achieve possible theoretical properties, including convergence, stability, and computation complexity; and (5) more statistical experiments could be conducted on other similar problems so as to demonstrate the performance and properties of the model.
Footnotes
Acknowledgements
The authors are extremely grateful to College of Design and Manufacturing Technology, Muroran Institute of Technology, Japan, for accepting one of our co-authors, Peng Chen as an international exchanging student and providing him all the conveniences. The authors also deeply appreciate Professor Hanajima Naohiko for his scientific and rigorous guidance to Peng Chen.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Nature Science Foundation of China under Grants 61603034 and 61801019, Beijing Municipal Natural Science Foundation (3182027), and Fundamental Research Funds for the Central Universities, China, FRF-GF-17-B44.