
Abstract
In this article, the extremum seeking control of a two-dimensional mobile robot with external disturbances is discussed by applying dynamic angular velocity turning method. First, the extremum seeking scheme is proposed to describe the trajectory of the two-dimensional robot and to achieve extreme value optimization through dynamic feedback. Secondly, the method of finite-time control and dynamic feedback is proposed to ensure that the dynamic angular velocity converges to the virtual controller within a finite time. Thirdly, the sliding mode disturbance observer is designed to guarantee that the observer converges to an unknown disturbance in finite time. Furthermore, we allow the averaging method and the results are applied in stability analysis. Finally, our control scheme is feasible by a series of simulations.
Introduction
Extremum seeking control (ESC), as an optimization method, has shown its superiority in many fields in the past years and has been widely studied. 1 –10 From local convergence 1 to semi-global convergence and then to finite-time convergence, it has attracted considerable attention in the field of control. However, with the deepening of research, dynamic angular velocity ES with external disturbances is still a challenge, because how to control it from kinematics design to dynamics is not available currently. 11 With the increase of engineering applications, the advantages of dynamic control input will be more prominent, and the input of dynamic control is a controller based on torque, force, or current, making it easier to apply in practical engineering. Under the creative proposal of the feedback and stability convergence model 1 and based on Lyapunov method, the conjunction of the Lie bracket-based averaging method 12 with the conclusion of Moreau and Aeyels 13 by Dürr et al. 14 made the ES more and more mature. Some of the recent work has applied ES in some unknown practical systems, such as jet noise ESC, 2 reduce bluff-body drag, 3 antilock brake system (ABS) design, 10 maximum power point tracking (MPPT) of photovoltaic systems, 4 tunable thermoacoustic cooler, 5 urban traffic signal control, 6 fed-batch processes, 7 smart inverters for visual-aural radio (VAR) compensation, 8 human exercise machine, 9 and periodic orbits of ESC. 15
For the turning problem of dynamic angular velocity, Sanders et al. have improved the classical averaging method 16 and applied it to the high-frequency oscillation closed-loop system to achieve the convergence of vehicle trajectory. Chen et al. 17 proposed finite-time nonholonomic robot tracking moving targets in polar coordinates 18 based on angle turning analysis. Recent work by Matsuzaki et al. 19 proposed a maneuvering target tracking filter based on constant velocity and angular velocity model, which ensures the inconsistency between the actual target and the tracking target caused by angular velocity changes. Although the above control methods can achieve the stability of the dynamic system in a limited time, there is still much more research space compared with the case of optimizing the angular velocity extremum. Moreover, the classical theories described above always have the trouble of unknown perturbation, because the influence of some external unknown signals makes the system have certain limitations in practical application. Therefore, we propose a virtual disturbance observer method 20 and reasonably add Lyapunov function to make it converge to the unknown disturbance signal in a finite time.
This article introduces the application of adaptive controller on the level of external disturbance with dynamic feedback. On the premise of ensuring the stability of the system, we limit the measurable but unknown dynamic input to sine and cosine functions
21
; meanwhile, the averaging method is combined with external disturbances, joined the Lyapunov stability theory to make the two-dimensional (2-D) robot system angular velocity transformation converges to the virtual controller within finite time, finally makes the system trajectory error exponentially converges to zero. The further simulation results also prove this point. Then, we would like to express special thanks to Alexander Scheinker et al. whose tracking controller can be perfectly applied to our dynamic feedback system. The main ideas and contributions can be summarized as follows: The angular velocity converges in a finite time through the input control of the torque and force, and the addition of external disturbance makes our control system better applied to the actual situation. The virtual disturbance observer enables the system converge to unknown disturbance in finite time by sliding mode control. The torque and the input of specific function form a kind of double-control closed-loop system, so that the robot can quickly find the optimal point even if there exists interference.
The organization of this article is as follows. In the second section, we give the background on averaging and stability as well as the main question formulation in this article. In the third section, some optimization results and main conclusions are presented, and the background on averaging and stability is stated to demonstrate our results. In the fourth section, we present the simulation results of the stated scheme, and finally conclusions are proposed in the last section.
Averaging and stability results and problem formulation
Averaging results of Sanders et al.
Theorem 1
For T ∈ (0,∞), and set K

where the functions

are continuous and meet the Lipschitz condition, and
If the function

So that there exists measurable function
where
Then, for all

Converges with respect to k, the solution x(t) satisfying

Stability results
A system is given by reviewing the definitions in Moreau and Aeyels. 13

Let

Similarly whose trajectory is denoted as
Definition 1 (convergence of trajectories)
The systems of (3) and (4) above can be said to satisfy the converging trajectories property if for every

Theorem 2 (GUAS)
Consider system (3), the origin of equation (4) can be said to be global uniformly asymptotically stable (GUAS) if the following three situations are all satisfied
13
:
Uniform stability: Just for every

Uniform ultimate boundedness: For every

Global uniform attractivity: For all

With this method above, we define the stability laws of system (4) as follows:
Definition 2 (practical globally uniformly ultimate boundedness)
Uniform stability: For every

Uniform ultimate boundedness: For every

Global uniform attractivity: For all

Corollary 1
If functions (3) and (4) satisfy the convergence of trajectories and if the origin is a GUAS equilibrium point of equation (3), then the origin of equation (4) is
Problem formulation
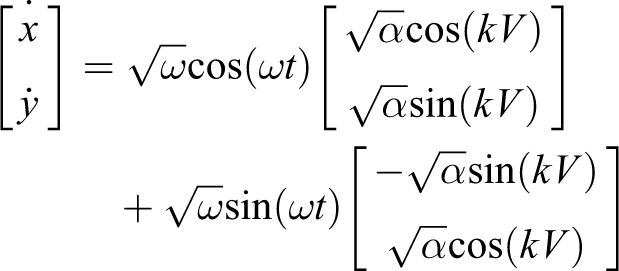
Consider this model of 2-D mobile robot with external disturbances has the following dynamic feedback of angular velocity ω

where
In this scheme, the position of the mobile robot
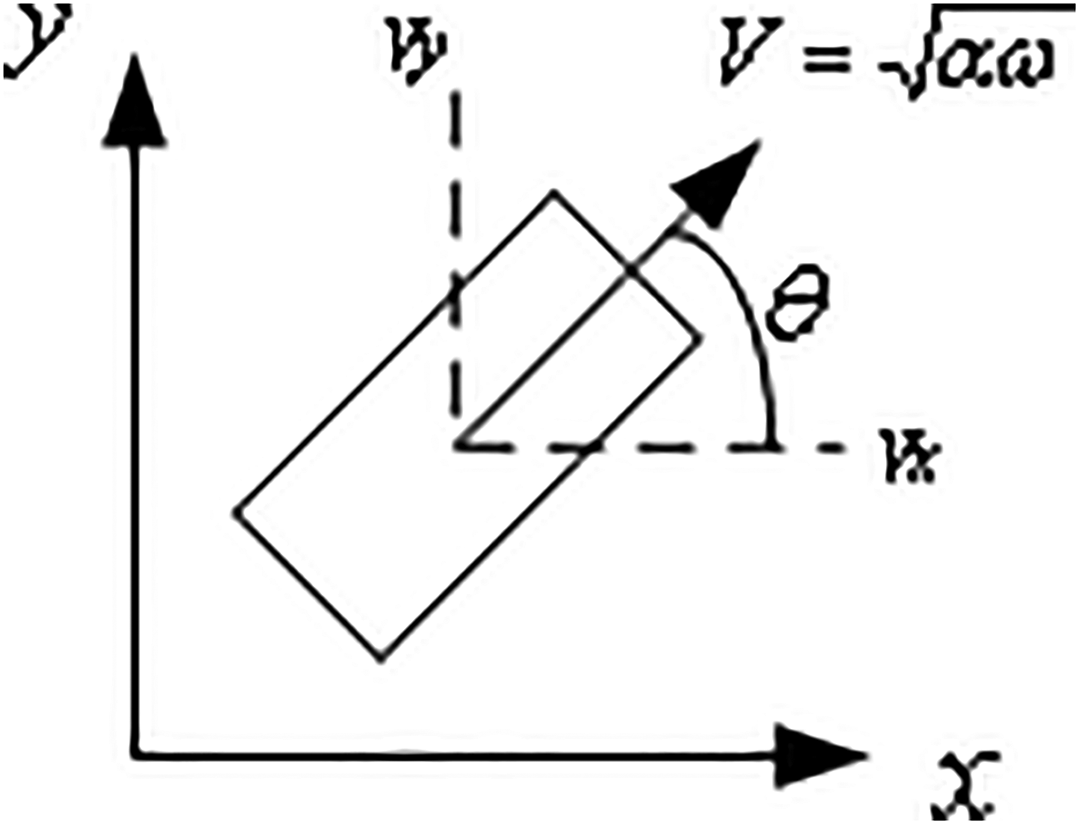
Velocity of mobile robot.
Remark 1
In order to make our analysis clearer, and due to

It is established whether
We set an arbitrary number g which is less than c 2, such that

as well as
Therefore, it can be seen that the main problem studied in this article is to design a dynamic controller in an environment where GPS is not applicable and exists of unknown disturbance to achieve the purpose of ES by describing the dynamic angular velocity turning and make the following two expressions are established.
Main results
This section presents the solution to the problem of vehicle control. Firstly, τ is proposed as a dynamic controller which makes the angular velocity converges to the virtual controller in a finite time through a series of proofs. Then, on the basis of convergence, the unknown disturbance will be added and finally converge to the disturbance signal in the finite time by establishing the disturbance observer. Finally, the convergence proof of the vehicle trajectory in the finite time is completed by the averaging method.
Assumption 1
We definite that the controller error system

The derivative of

By combining equations (5) and (8), we can get

The virtual controller can be designed as

Where the letter i represents the ith element of our virtual control, and in this article, we specify that i just represents the control laws of x and y directions; since the analysis in the x and the y directions is exactly consistent, we will not specifically distinguish them in the following paragraphs.
By expanding equation (10), the derivative of

And rewrite equations (9) and (11) as

Lemma 1
For a first-order system
By equation (12), the kinetic variable control laws τ can be designed as

Theorem 3
Consider the controller error system (9) and the kinetic controller, the error system converges to zero in a finite time based on lemma 1. So that the angular velocity ω converges to the virtual control
Proof
Substituting control law (13) into error system (9), it can be obtained that

Consider Lyapunov function

Equation (14) can be written as

Integrate both sides of this equation, we can obtain that

Eventually, we can get this equation

Obviously, through a series of derivations, W can exponentially decreases to zero with time in a finite time, so
Lemma 2
We propose a continuous positive definite and bounded function
Where t
0 is the initial value, and 0 <
By system (5), the sliding mode surface of disturbance can be designed as


And


Where these parameters c,

By combining equations (5) and (17) to (19), we can get the conclusion

Consider the system (5), sliding mode surface (16), and disturbance observer (18), the sliding mode disturbance observer ξ can converge to the disturbance signal d in a finite time.
Proof
With the equation of derivative of a with respect to time, substitute equation (21) into the Lyapunov function

According to those parameters in equation (20), equation (22) can be rewritten as

Based on equation (23) and lemma 2, it can be proved that the sliding mode surface can converge to zero in finite time, easily confirm the disturbance observer converge to unknown disturbance in finite time by equation (17).
By lemma 2 and theorem 3, we replace the external disturbance signal with disturbance observer to better illustrate the convergence of the system and the system (13) can be ultimately transformed as

After the above proofs, we have clearly studied the dynamic angular velocity turning problem of 2-D vehicles with disturbance, in order to better illustrate the movement of the mobile robot in the case of unknown orientation; the process of trajectory optimization is described concisely and clearly in Figure 2.

ES control scheme. ES: extremum seeking.
And we assume a GPS-denied environment, then set up a 2-D robot that has an unknown initial direction. The goal of the robot is to find the minimum or maximum value of the unknown but measurable function
Lemma 3
By theorems 1 and 2, we state that for all T ∈ (0,

And the trajectory

With the function (6), the Lie bracket of the functions fi and gj is

Remark 2
If the function

So that for any

And we expand

So equation (24) can be stated as follows
By theorem 1, the averaging method can be expanded that

By simplifying the right-hand side, we can obtain

We have

Apply the formula

Therefore, the trajectory
Simulations
In this part, the finite-time theory and the virtual controller tracking method will be proved by MATLAB simulation in the case of an unknown robot with external disturbance. Our simulations will be based on the following system

and we assume that the initial position of the robot is (1, −1), and the function
The simulation results are shown as follows. In Figures 3 and 4, showing the trajectory of the system
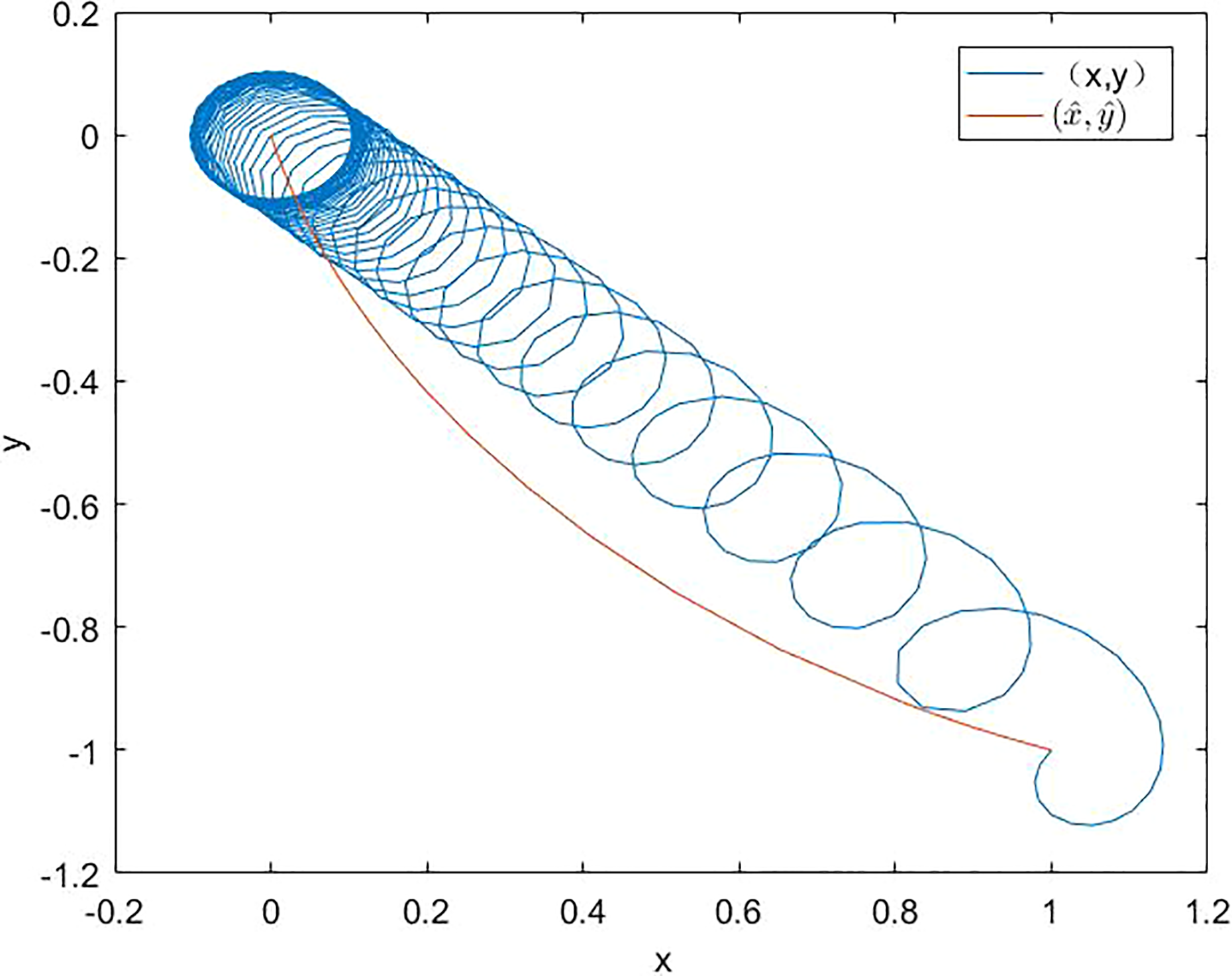
The trajectory of the robot and averaging system.

The trajectory of x direction.

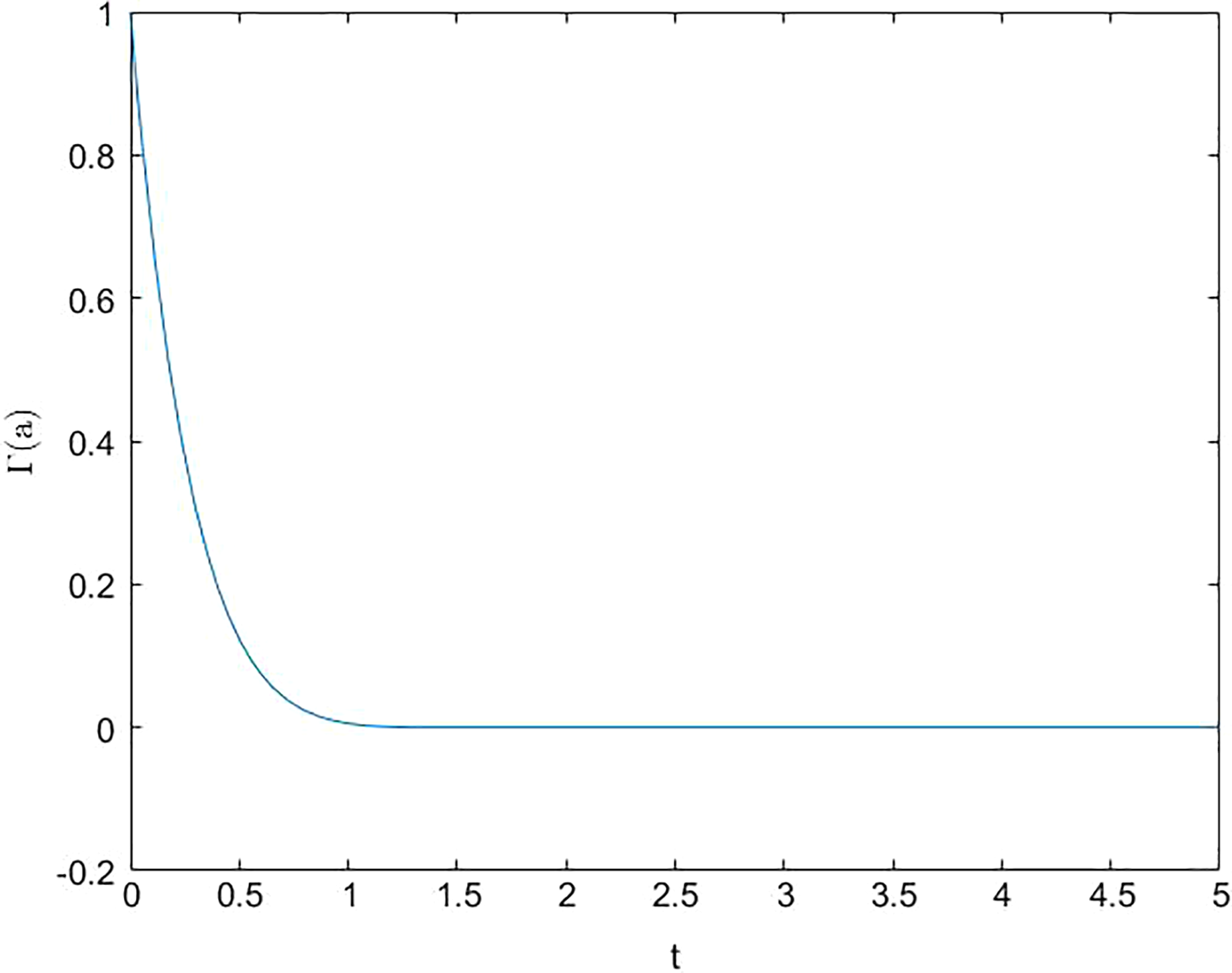
The controller error system.
The difference with observer and disturbance signal.
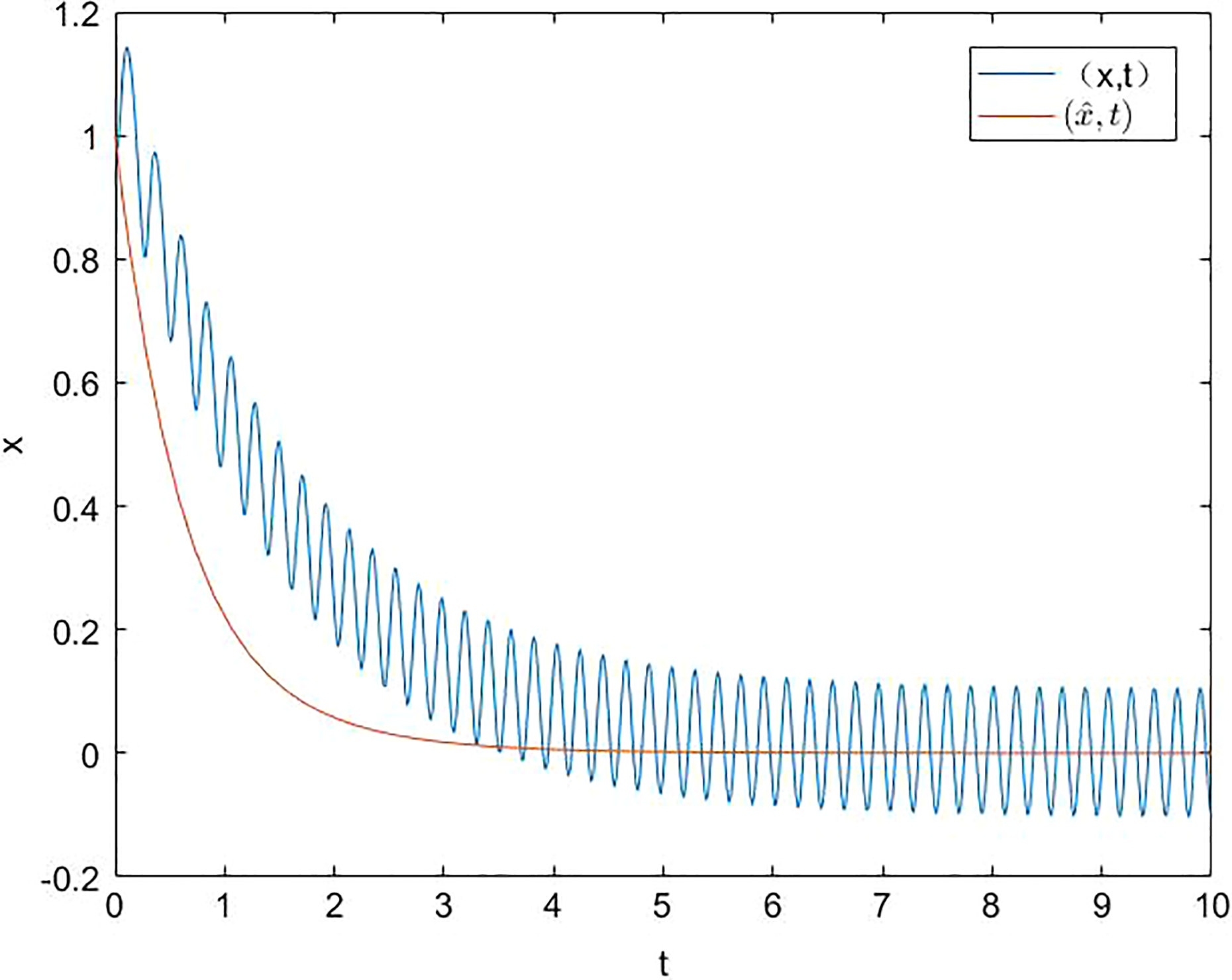
System trajectory and average state of x.
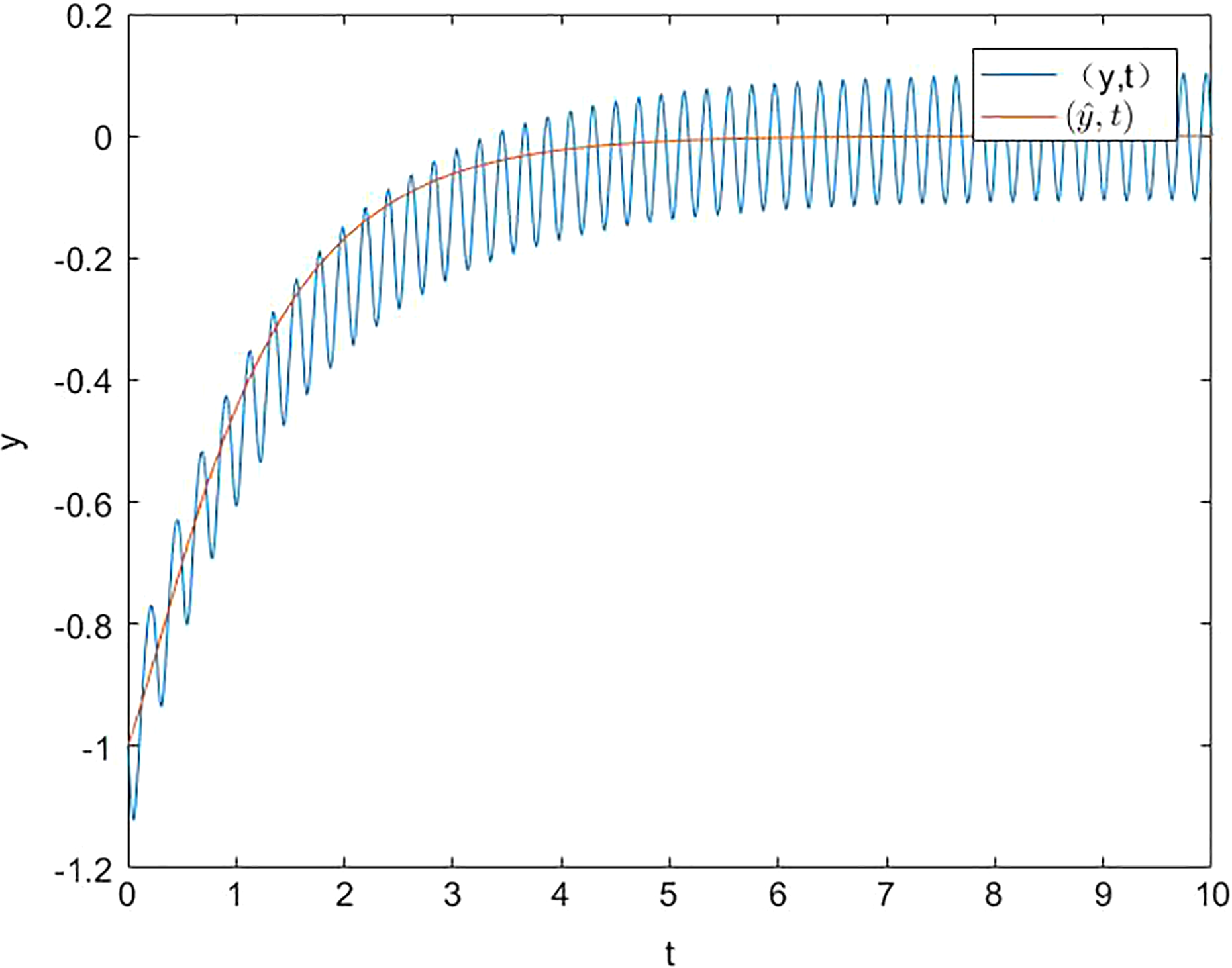
System trajectory and average state of y.
Conclusion
This article studies the problem of dynamic angular velocity turning for ESC of a 2-D mobile robot with external disturbances through a method of averaging and a virtual controller is designed with a torque or force as inputs as well as an unknown disturbance. The virtual controller makes the tracking error system can converge to zero in finite time. And the trajectory
In addition, although the theory of this article has not been realized in practice, after studying the control characteristics of unknown systems in depth, it is found that the robust control methods applied to uncertain robots mainly include adaptive control, variable structure control, modern Lu. Rod control, and so on; these can well solve the uncertainty of unknown system parameters and external disturbances.
Wang et al. 25 proposed an adaptive delay control scheme, which is a scheme that is easy to apply to the actual situation, 26 and the time delay estimation (TDE)-based control method can be well applied to the movement of this article’s robot; this is a control method that uses an intentional time delay signal to estimate the dynamics of an unknown system. 27 When a 2-D robot is subjected to an unknown external disturbance, it uses TDE to obtain an estimate of the system dynamics, so no system dynamic model information is needed. 28,29 We will combine this method to improve the theory of this article in subsequent research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was supported by the Natural Science Foundation of China (61304004, 61503205) and the Fundamental Research Funds for the Central Universities (2019B40114).