
Abstract
Rotary double inverted pendulum is a highly nonlinear complex system and requires a high performance controller for its control. Using gain matrix which is obtained through state feedback technique may create complexity while removing the steady-state error for all states. Incorporating an integral action can be an alternative for these errors. Therefore, a state space–based fractional order controller with fractional integral action is designed and tested on a rotary double inverted pendulum in this article. The fractional integral controller is designed based on Bode’s ideal transfer function. Two degree of freedom is considered for tuning purpose as well. The integer order controller based on the state space approach is also shown for comparison. Simulation and experimental results are presented for both controllers of this rotary double inverted pendulum system.
Keywords
Introduction
A link rotating above its pivot point is called an inverted pendulum. Controlling issues of this type of inherently unstable systems are considered as a classic problem in dynamics and control theory. This nonlinear system can be implemented to justify the effectiveness and to proof the enhanced performance of new control algorithms. The double inverted pendulum is the next level complication of classic single inverted pendulum problem. The double inverted pendulum can move either linearly on a cart or in a circular way mounted on a rotary arm while this arm experiences torque produced by a servo motor. The rotary double inverted pendulum is considered as an extremely nonlinear unstable system and consequently to design its controller is a challenging problem. Due to its complexity, the double inverted pendulum becomes an attractive tool to test the performance of different modern control techniques. Moreover, the double inverted pendulum has several critical applications in spacecraft and aircraft control. Specially, the control concept of double inverted pendulum is effectively applicable for attitude control with a double gimbaled momentum wheel called gyropendulum. 1 Moreover, the double inverted pendulum represents the building block of humanoid robots and in the modeling of rockets in liftoff. 2,3
There are several robust controllers proposed in recent years such as fuzzy controller, 4 neural network controller, 5 genetic algorithm controller, 6 adaptive controller, 7 and sliding mode controller. 8 These are all considered as integer order controllers. However, recently, noninteger order calculus became an attractive tool to apply in different disciplines of science and technology. For the automation field, design and implementation of fractional order controllers represent a highly promising area of research. It is already proven that the performance of integer order controllers can be improved using fractional order calculus. 9 –11 In fact, the fractional order controllers are more flexible than the integer order controllers because of the availability of higher number of tuning parameters, although the tuning procedure increases the complexity. Effective tuning techniques are investigated and can be seen in published papers (see e.g. Das et al. 12 ).
The challenge in this article is to use fractional order linear controllers to control the rotary double inverted pendulum system. Although, currently the fractional order controllers are often implemented experimentally, very few implementations are addressed using the state space approach. The designed controller using state space method–based augmented system approach can be represented using fractional order dynamics. 13,14 The pseudo-state feedback–based fractional order system is also investigated with the help of system augmentation. 15,16 Recently, proportional–integral (PI)-based state feedback approach was introduced using fractional calculus. 17 –20 The control gains for the proportional and integral compensator of the state feedback controller are designed using the pole placement technique using the closed-loop characteristic polynomial. The experiment was also performed using the PI-state feedback approach for a linear single inverted pendulum-cart system.
The state space–based fractional order controller is another technique to regulate such a nonlinear scheme in which the integral control–based state feedback is used but a fractional integrator is introduced in the place of integer integrator. In this case, the gain associated with this integrator is substituted by a fractional integrator which must be designed. This method is introduced in Al-Saggaf et al. 21 and implemented on a single inverted linear cart pendulum. But a multiple inverted pendulum is more complicated and highly nonlinear system. There are many uses of double or triple rotary inverted pendulum in robotic arm and in space applications. In this article, the proposed method is implemented to control a double inverted rotary pendulum. The illustration on a double inverted rotary pendulum system emphasizes the viability of the anticipated method to the control of linear systems that can be stable or unstable. The remaining portion of the article is organized as stated below. The Bode’s ideal transfer function is explained briefly in the second section. The integral control–based state feedback control is also explained in the same section. The third section describes the mathematical modeling of the rotary double inverted pendulum. Simulation results are shown in the fourth section. Experimental results are presented with a brief discussion including the procedure in the fifth section. Finally, the sixth section concludes this article.
Fractional integral control combined with state feedback
A state feedback control with an integral action is a very useful method for the purpose of tracking a specific set point and rejecting a load disturbance. 22 In the integer case, the state space expression of linear time invariant (LTI) system model is given by

where

There are some suitable methods to compute the state feedback vector
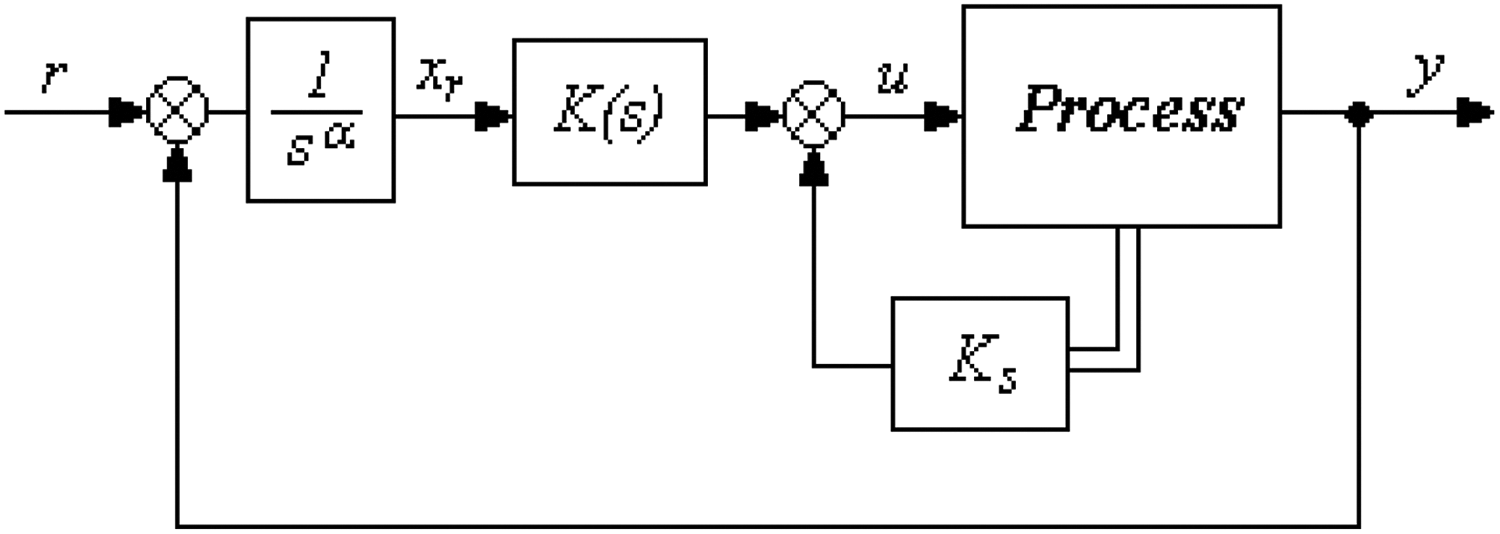
It is known that the purpose of state feedback control is to suitably change the poles position but to minimize the influence of its zeros in the transient response, we can use a fractional integrator
Fractional compensator–based state space control.
The closed-loop transfer function using Bode’s ideal method is

Here,

The step response of equation (3) shows the behavior of an underdamped second-order system with damping ratio between one and zero. Again, the value of κ can be computed from its relation with the overshoot of the step response,

Note that, due to the state feedback
Let an integer order linear LTI system be given by equation (1). The control law is

where

The n characteristic roots of inner-loop are arbitrarily placed by the vector

and can be computed with the help of Ackermann’s technique,
26
and the integer compensator

The inner-loop’s characteristic polynomial is denoted by

The details of the proof of this result can be found in Al-Saggaf et al. 21
Mathematical modeling of rotary double inverted pendulum
Model description
The schematic diagram of double inverted rotary pendulum is shown in Figure 2.
27
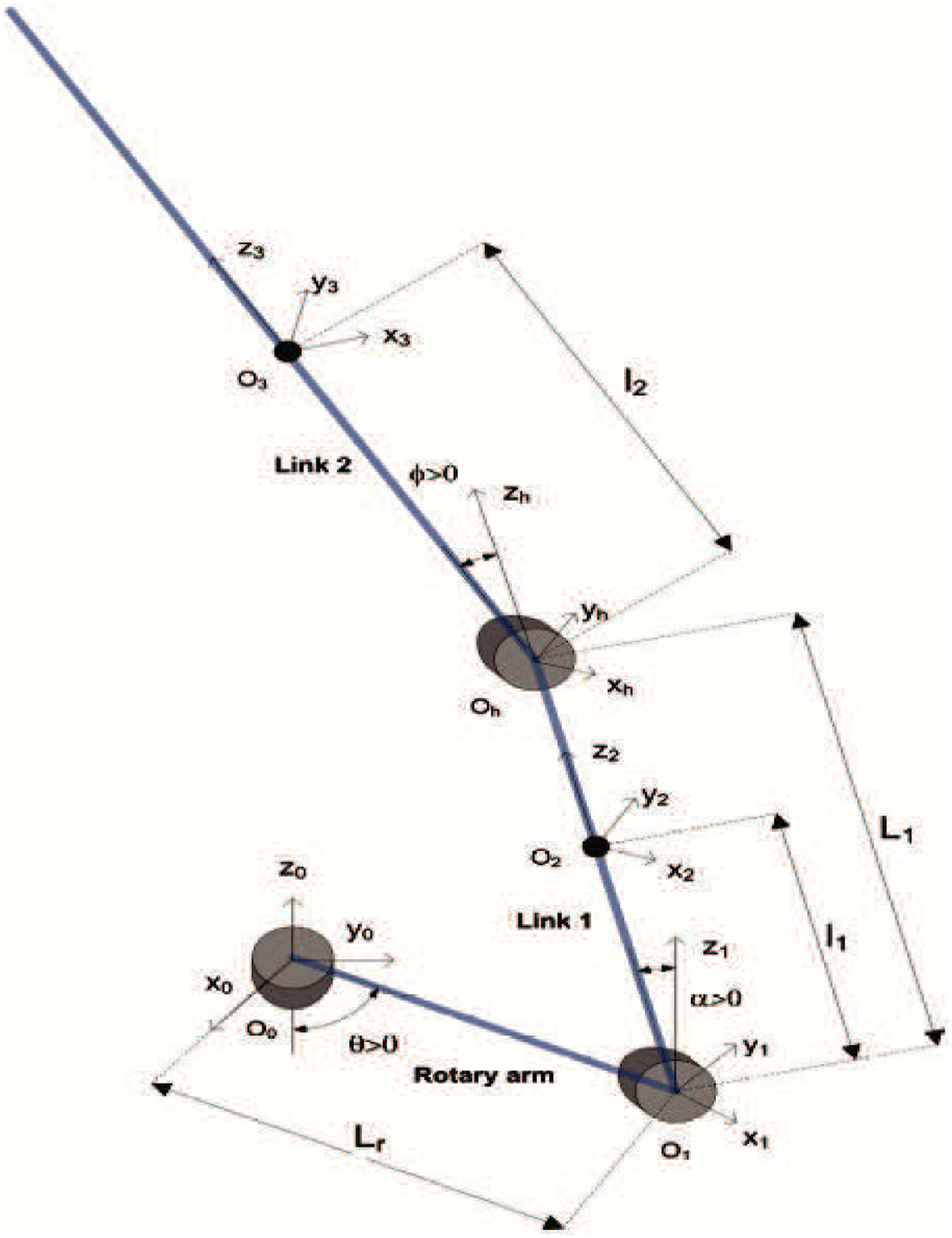
Schematic diagram of double inverted pendulum system. 25
Nonlinear dynamics
By applying the Lagrange equation

The variables

The corresponding velocities are

The Lagrangian of the system is described

where T is the total kinetic energy and V is the potential energy of the system. One can get


Now, from equation (16), the Lagrangian is found in order to get the nonlinear equations of motion (EOMs) and various derivatives are computed. q is considered as a generalized coordinate vector q, therefore, it can be globalized into a matrix form

where, D, C, and

See the literature
26
for an explanation for corresponding parameters of the rotary servo motor (SRV02) parameters (e.g. constant of back-emf,
Linearized model
The linear state space model is

where x and u are the state and control input. A, B, and C are matrices for the state space representation. For the double inverted rotary pendulum system, the state vector is
Linearization of the nonlinear system gives following state space matrices 27


The position of the servo that actuates the pendulum link angles is considered as a measured output. Therefore, the matrix, C, of the output equation is

The velocities of the servo link and the angles of pendulum can be obtained by computing the derivative and passing through a high-pass filter.
Simulation results
The proposed method described in the third section is implemented to test the stability and check the set point tracking performance of the rotary double inverted pendulum system. The Process block of the diagram shown in Figure 1 characterizes the linear model of the double inverted rotary pendulum. A fractional integral control with state feedback is incorporated in the model. The linearized pendulum model is numerically described as follows



The characteristic roots of the open-loop system are located at 0, 0, 25.3110, −21.1906, 9.8158, −9.0252, and −0.1263; therefore, the system is unstable. To stabilize it,

Now, the new transfer function is obtained as follows

where

Now,

For the performance evaluation of the designed controller, a set point tracking is observed between t = 0 s and t = 25 s.
The proposed fractional order control scheme is evaluated by changing the set point at t = 0 s and t = 25 s. The simulation results are demonstrated in Figures 3 to 6 of the linearized model described in equations (23) to (25). These figures entail that, after some transition period, the pendulum angles are stabilized and the rotary position of the arm tracks the predefined set point. The fractional order controller performs better than the integer state feedback controller computed using the LQR (Linear Quadratic Regulator) method. Figures 4 and 5 show that, due to the variable set point, the angles of the bottom and top pendulum are distorted but the control law reacts immediately and reactuates to return toward its stable position α = 0 and θ = 0.

Double inverted pendulum rotary arm position tracking.

Angle of bottom pendulum and a set point change.

Angle of top pendulum and a set point change.

Control voltage input.
Experimental results
After simulating the designed control law on the linear model of a rotary inverted pendulum, it is implemented on a similar physical system in a practical experiment. The Quanser 27,28 experimental setup is shown in Figure 7. In this experimental setup, a double inverted pendulum is the main component. A Rotary Servo unit (SRV02) is used to create angular motion of the pendulum for tracking purposes. A single channel linear voltage amplifier (VoltPAQ-X1) is used to adjust the supply voltage to the servo system in order to produce required torque. Further, a data acquisition board (DAQ) is used to establish digital connection with personal computer as an interface between hardware and software. Matlab software is used to design the fractional order controller in Simulink environment. A QUARC Version 2.3.355 software is used as the bridge connection between Matlab and hardware in real time. By implementing a controlled voltage to SRV02 unit, both of the pendulums are being balanced keeping them vertically in the upright position. To implement the fractional integral control scheme based on state feedback technique, the linearized model of the rotary dual inverted pendulum (equations (23) to (25)) is considered again.

Experiment of rotary double inverted pendulum system.
Experimental results are shown in Figure 8 for fractional order controller Further, the results of integer order controller are also produced for comparison as shown in Figure 9. The closed-loop reference mode parameters are used for the design of fractional order controller such as,

Experimental results with fractional order controllers.

Experimental results with integer order controllers.
Figure 10 shows the performance on disturbance rejection. To produce these disturbances, the top pendulum is tapped lightly arbitrarily. In this investigation, the top pendulum is tapped from t = 32 s to t = 37 s. The results produced by this experiment prove the effectiveness of fractional order controller in terms of external disturbance rejection. Hence, the proposed controller is robust enough for the highly nonlinear double inverted rotary pendulum system.
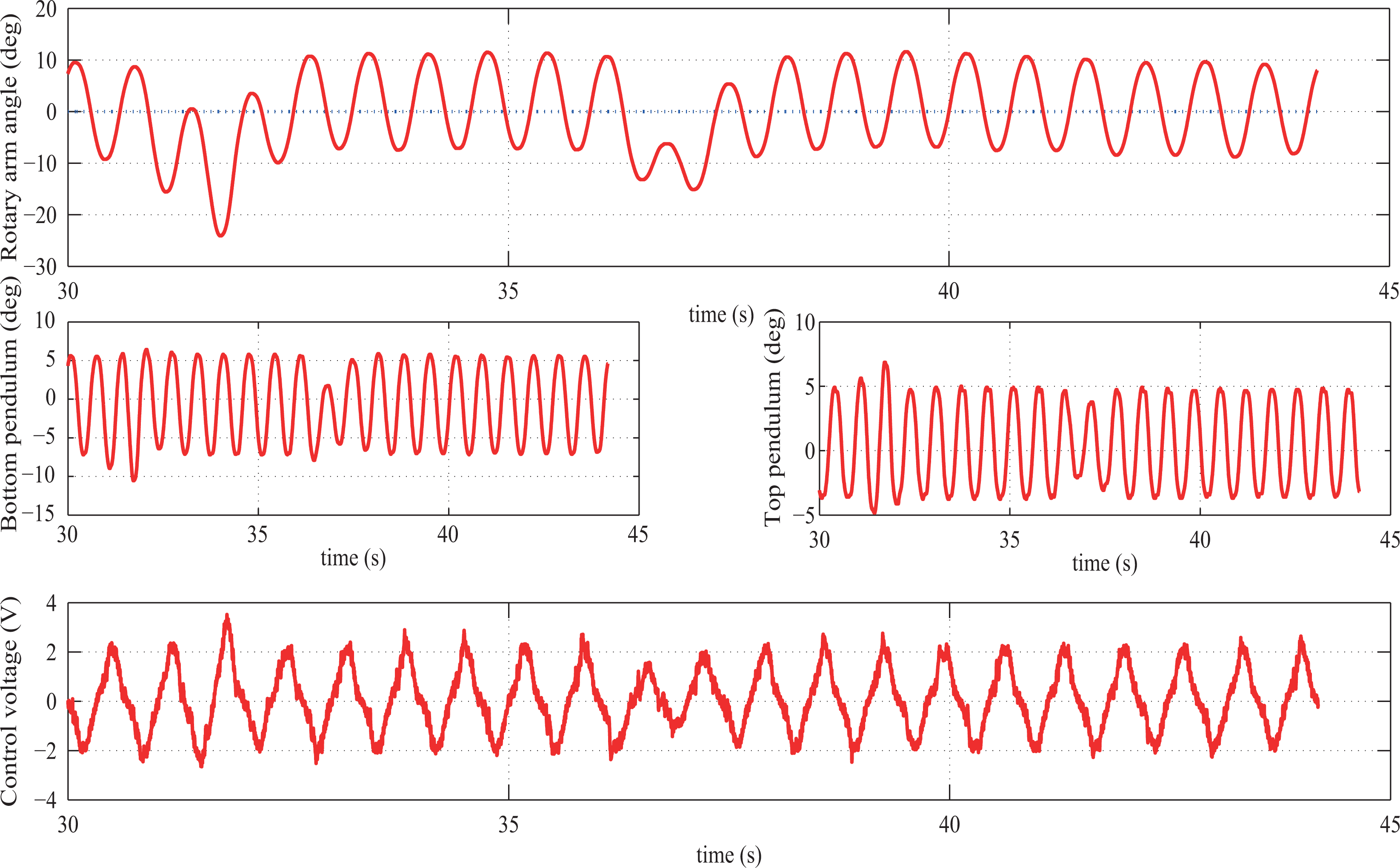
Experimental results with disturbance rejection for fractional order controllers.
For further investigation, the experimental results are analyzed for the fractional order controller influencing the square reference with frequency 0.1 Hz and amplitude gain 5, in Figure 11. In these results, it is observed that the fractional order control law is following the pattern of the reference signal. Hence the designed controller is robust as well.

Complete experimental results for the square reference signal.
Conclusion
In this article, the fractional order state feedback with integral controller is designed based on the state space representation. The designed controller is simulated for the highly nonlinear rotary double inverted pendulum system. Results show better performance than the integer order state feedback controller. Practical implementation is also successfully conducted using the designed fractional order controller. Although implementing the fractional order controller on such inherently unstable system is a big challenge, yet the experimental results show a better performance in terms of precise and smooth control voltage as well as external disturbances applied on the pendulum. Disturbance rejection and robustness performances are also observed for the proposed fractional order controller.
Footnotes
Acknowledgment
The authors would like to acknowledge the technical and financial support of KAU.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project was funded by the Center of Excellence in Intelligent Engineering Systems (CEIES), King Abdulaziz University, under grant no. CEIES-16-12-01.