
Abstract
The correlation between stability and energy variations in control strategies for a mobile base robot with manipulators subjected to external disturbances is introduced. The correlation results can be used to stabilize and control problems when a mobile base robot is subjected to various types of external disturbances. This is because different robot system energy values display different stability distribution curves. Mobile base robot stability based on varying system’s energy is described. Two control strategies, computed force/torque and adaptive compensators, are applied to minimize uncertainties accompanied by the robot’s movements. The two compensators are then compared by simulating applied external disturbances, such as mobile base tipping motion and load mass changes on the robot end-effector. A comprehensive comparison with other methods is also described. The proposed technique is a useful tool in the maintenance of the degree of control and stability of the system and has various applications in the mobile robot tasks including choosing and placing operations, maneuvering around the workspace with protruding obstacles on sinuous shape paths, and manufacturing tasks.
Keywords
Introduction
Mobile robots are a solution for transferring loads over large distances, such as from inventory to a robotically operated cell. This type of mobile manipulator has many applications for tasks such as choosing and placing operations, remote maintenance, hazardous material handling, and so on. The movements of a robot’s mobile base and its manipulators need to be coordinated in order to balance the system and execute the specified tasks harmoniously.
Among various research subjects about mobile base robot system, this article focuses on stability with manipulators subjected to external disturbances based on varying system mechanical energy. Literatures 1 –24 show the current trends in the area of stability analysis for robot systems. Xiao and Ghosh 1 introduced a real-time planning and control for robot manipulators in a reconfigurable work-cell. Du Toit and Burdick 5 described a partially closed-loop receding horizon control algorithm whose solution integrates prediction and estimation. Debanik 6 developed a visibility map algorithm to generate a safe path for a three-dimensional congested robot workspace. Joshi and Desrochers 7 and Dubowsky and Vance 8 introduced stabilities of mobile robots based on geometrical analysis. Surdhar and White 12 addressed a development of a fuzzy-controlled manipulator using optical tip displacement feedback. Norouzi et al. 20 proposed an analytical strategy to generate stable paths for reconfigurable mobile robots such as those equipped with manipulator arms and/or flippers. Ning et al. 21 introduced the collective behaviors of mobile robots beyond the nearest neighbor rules by applying an acute angle test-based interaction rule. Krid et al. 22 developed an active anti-roll system and its associated controller for a high-speed and agile autonomous mobile robot. Kim et al. 24 proposed a design of a transformable mobile robot as a concept of hybrid-type mobile robot in order to enhance mobility.
Robot system stability is an open issue that requires further research while the system is subjected to various external disturbances. Diverse methods have been introduced to resolve this issue. However, few such methods explore the technique described in this article. This includes application of system energy function to stability analysis while mobile base robots with manipulators are subjected to external disturbances. This article presents correlation results between stability and energy variations in control strategies for a mobile base robot with manipulators subjected to external disturbances. A comprehensive comparison with other algorithms is described in the “Comprehensive comparison with other methods” section.
Figure 1 shows the overall robot system information flow where correlation between stability and energy variations is derived through the system’s energy function linked to the computed force/torque and the adaptive compensators. The article is organized as follows. The “Modeling and stability analysis based on varying system total mechanical energy” section first describes the modeling and dynamic equations of a mobile base robot with manipulators (including mobile base tipping movement). Next, the robot system energy function is derived to show the correlation between stability and energy variations. If system total energy is progressively decreased, then a set of system nonlinear differential equations will ultimately converge to an equilibrium state. From the Lyapunov direct method, a real-valued energy function for the robot system is obtained. The variation of that energy function can then be used to grasp the degree of robot system stability. In the “Computed force/torque compensator” and “Adaptive compensator” sections, algorithms for the computed force/torque and the adaptive compensators are described. Implementing practical nonlinear robot system control requires considering issues like external disturbances, unknown loads, computational complexity, parameter uncertainty, and so on. The computed force/torque compensator uses a function of error as a performance index to measure the system operation and modifies the force and torque to obtain a more optimum response. The adaptive compensator suppresses perturbations, compensates for system uncertainties, and follows the desired trajectories uniformly in all configurations by obtaining estimated values for the system parameters.

Overall information flow of mobile base robot system.
In the “Results and comparisons” section, the two compensators in the “Computed force/torque compensator” and “Adaptive compensator” sections are applied to the selected mobile robot system to show the correlation between stability and energy variations. Simulations for comparing the two compensators are performed by applying external disturbances, such as base tipping motion and load mass changes on the end-effector, to the robot system. The “Results and comparisons” section also describes a comprehensive comparison with other methods. Conclusion and future works are described in the last section.
Correlation between stability and energy variations in control strategies for mobile robot subjected to external disturbances
To design a stabilizing control strategy, the correlation between system stability and energy variations under external disturbances is described. Robot stability is analyzed by varying system energy, where values of control variables composing the system energy function are fed from the computed force/torque and the adaptive compensators. Then, some examples are presented concerning base tipping motion and changes to load mass on the end-effector.
Modeling and stability analysis based on varying system total mechanical energy
Modeling and dynamic equations
The selected mobile base robot consists of rigid links, with two degrees of freedom, mounted on a base that moves in the x direction of a Cartesian coordinate frame and has the base tipping motion θb as shown in Figures 2 and 3. Figure 3 shows the mobile robot system including the tipping angle θb , where +|θb | represents the front wheel position when placed higher than the rear wheel position, and −|θb | represents the opposite case to the above +|θb | case.

Mobile base robot with manipulators under external disturbances.
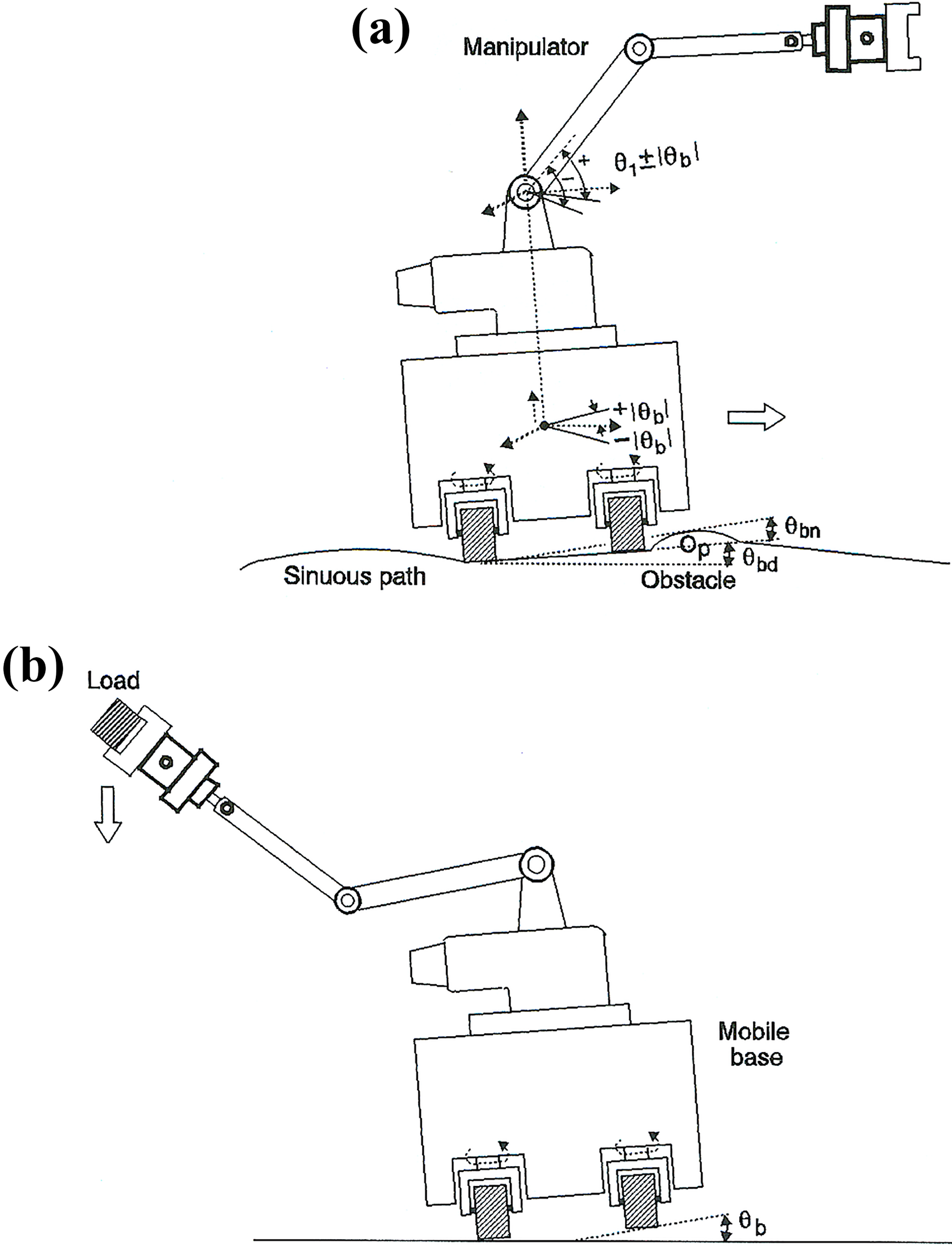
(a) θb d (sinuous trajectory), θbn (tipping noise), and Op (protruding obstacle) and (b) θb (tipping angle).
The dynamic equations of the selected robot system are obtained by the Lagrange–Euler equations 25
where qz is the zth generalized coordinate. Qz is the zth generalized force. L is the Lagrangian. x and θ are the translational and the rotational motion variables, respectively. F and τ are the force and the torque, respectively.
As an example of application for the Lagrange–Euler equations, some of the equation (1) for the selected robot system in Figure 2 are shown in equations (2) to (6). If the three coordinates (x, θb
, θ
1) among the generalized coordinates



respectively, where the Lagrangian L is
In equation (5), K (= K
1 + K
2 + K
3) is the total kinetic energy of the selected system. K
1, K
2, and K
3 are the kinetic energies of the mobile base, the lower arm, and the upper arm, respectively. P is the potential energy of the selected system. In equations (2) to (5) and Figures 2 and 3, mb
is the mass of the mobile base. mi
(i = 1, 2) is the mass of the ith arm. li
is the length of the ith arm. h is the height from the xw
-axis to the origin of the lower arm. y is the height from the xw
-axis to the center mass of the mobile base. Ib
, I
1, and I
2 are the mass moments of inertia of the mobile base, the lower arm, and the upper arm, respectively. x is the mobile base translational motion in the xw
direction. fx
and θb
are the mobile base’s translation force and tipping angle. θi
is the relative orientation angle of the ith arm with respect to the mobile base.
Equations (2) to (4) with the Lagrangian equation (5) give

respectively. The elements (M 11, M 12, M 13, M 14, M 21, M 22, M 23, M 24, M 31, M 32, M 33, M 34, U 1, U 2, and U 3) in equation (6) are enumerated in equation (31).
From equation (1), the dynamic equations for the robot system can be written as

where

where
Energy function of the robot system
The system energy function uses a nonlinear mass–damper–spring (MDS) system because its generalized concepts can be applied to a more complicated nonlinear system, such as the mobile base robot system described in the “Modeling and dynamic equations” section, and so on.
The continuous nonlinear MDS system dynamic equation can be represented as

where m is the mass. x is a displacement of the mass m.

where the first and the second terms are kinetic and potential energies of the system.
With equation (9), the energy variation rate of the MDS system can be obtained by derivativing equation (10) with respect to the displacement x as follows
A negative value in equation (11) means that the nonlinear MDS system’s energy is progressively decreased by the damper so that the system differential equation ultimately converges to its equilibrium state. In conclusion, if system total mechanical energy is progressively decreased, then a set of mechanical system nonlinear differential equations will ultimately converge to an equilibrium state. Therefore, mechanical system stability can be understood by considering system energy variation. The generalized concepts in this nonlinear MDS system can be applied to more complicated systems, such as robot systems, and so on.
Lyapunov’s direct method can be used to derive a real-valued energy function for nonlinear mechanical systems as below. It is assumed that there is a system, for example, such as equation (11), represented by a set of nonlinear differential equation whose generalized state space notation form is

where x is a system state variable that belongs to Euclidean space Rn
. Then, some useful theorem and definition related to a stability of a system consisting of a set of nonlinear differential equations such as equation (12) are as follows.
26
–28
LaSalle’s theorem: Let Π be a bounded and closed set with the property that every solution of equation (12) which starts in Π remains for all future time in Π. Let
Definition of GAS: If a positive definite function φ(x) is continuously partial derivatives and the derivative of φ(x) along all possible state trajectory of the nonlinear differential equation (12) is
From a stability perspective, the correlation between stability and mechanical energy of a robot system can be formulated as follows: (γ 1) Convergence of the robot’s mechanical energy to zero implies an asymptotically stable system. (γ 2) Zero energy of the mechanical system means equilibrium state. (γ 3) System mechanical energy growth leads to an increase of the system instability. These relationships represent that system stability can be understood by considering the time variation of the system’s energy function. If mechanical system total energy is progressively diminished, then the mechanical system consisting of a set of nonlinear differential equations (equation (12)) will finally converge to an equilibrium state. Using Lyapunov’s direct method, a real-valued energy function for the robot system is generated. A variation of that energy function is then examined.
Based on the concepts and theories mentioned above, the energy function of the mobile robot system (a Lyapunov function candidate) is obtained as follows. A special case of the combined mobile base and manipulators is that first, the kinetic energy Ke of the mobile robot system can be written as

which is similar to

which is similar to
In a relationship between work and kinetic energy, if a force F with an acceleration a exerts on mass m of a particle, then an acceleration, an average speed, and a displacement of the particle are

respectively, where the initial values are v 0 = 0, t 0 = 0, and x 0 = 0. Then, the work, W, done on the particle is equal to its gain in kinetic energy. That is

Lastly, the rate at which the force does work on the particle is

that is similar to
Based on the concepts in equations (15) to (17), a time change rate of the kinetic energy K e, equation (13), in the mobile robot system is

From equations (13) to (14), the total mechanical energy of the mobile robot system is

that is a Lyapunov function candidate. In equation (19), the first term is the kinetic energy of the mobile robot system as denoted in equation (13), and the second term is the potential energy of the system as denoted in equation (14).
With equation (18) and

the energy variation rate decreased by the mobile robot system is finally obtained as

In equation (20), the real-valued energy function

for a stable system. The values q,
Computed force/torque compensator
The computed force/torque compensator utilizes an error function as a performance index to measure system operation and modifies the force and torque to obtain a more optimum response. The computed force/torque compensator overcomes robot system uncertainties in real time based on the system tracking performance.
The overall algorithmic flow of the computed force/torque compensator is shown in Figure 4(a). In Figure 4(a), θd
and

(a) Computed force/torque compensator and (b) adaptive compensator.
The above control variables are combined and used to derive requisite force and torque for the mobile robot system as follows

whose generalized form is denoted as

In equations (22) to (23), the observed response error signal is generated by comparing the model output to the actual system output, which is often corrupted by noise, as shown in the following equation

are the position and the velocity errors, respectively.
The computed force/torque compensator updates the force and torque for all links of the mobile robot system through its own control routine, and the updated values are fed to equation (21).
Adaptive compensator
The adaptive compensator estimates the robot system parameters to compensate for uncertainties. If the estimated values of the system parameters are obtained, the effects of any uncertainties can then be minimized as the compensator minimizes the tracking error. Literatures providing adaptive routine examples are found in the literatures. 29 –33
The estimated equation of equation (7) is

where



In equations (26) to (28),
The servo error is determined as

where if choosing

Figure 4(b) shows the overall information flow of the adaptive compensator, where meanings of the symbols, such as xd
, θd
, θbd
,
Results and comparisons
The above compensators are applied to the mobile robot system selected in the “Modeling and dynamic equations” section to show the correlation between stability and energy variations. A comparison of the two compensators is then described by simulating the applied external disturbances, such as mobile base tipping motion and load mass changes on the robot end-effector. In addition, a comprehensive comparison with other algorithms is described.
Results of applied computed force/torque compensator
The dynamic equations (equation (7)) of the selected mobile robot system, including the effects of both translational and tipping motions in Figures 2 and 3, are as follows.

In the “Computed force/torque compensator” section and Figure 4(a), the state variable is defined as

Equation (32) is the link driving acceleration input for calculating requisite force or torque, where
For the purpose of stability analysis, it is assumed that the mobile base and the arms follow preplanned trajectories. It first assumes that the mobile base tipping trajectory, θbd (t) in equation (33), can be generated as in the case when the mobile robot passes the sinuous shape path or the obstacle as shown in Figure 3(a). Next, the mobile base translational motion along the straight path, the mobile base tipping motion, the lower arm, and the upper arm move along the paths below

The system parameters are mb =98.6 kg, m 1 = 3.2 kg, m 2 = 2.1 kg, l 1 = 0.6 m, and l 2 = 0.5 m.
Some results are shown in Figure 5, where the solid lines (a1) and (b1) in Figure 5(a) and (b) represent changes of the position errors of the mobile base translational motion (x) and the lower arm orientation angle (θ 1), respectively. They are obtained using the computed force/torque compensator. The results indicate that the computed force/torque compensator minimizes the tracking errors.

Position errors of (a) mobile base translational motion (x) and (b) lower arm orientation angle (θ 1): [(a1/b1) Computed force/torque compensator and (a2/b2) adaptive compensator].
Results of applied adaptive compensator
The dynamic equation elements are described in equation (31). In the “Adaptive compensator” section and Figure 4(b), the state variable is the same one defined in the “Results of applied computed force/torque compensator” section, that is,

The robot system parameters mb
, m
1, and m
2 shown in equation (34) are modified by the adaptive rule, equation (30), with a positive definite matrix
Similar to the “Results of applied computed force/torque compensator” section, it is assumed that the mobile base translational motion along the straight path, the tipping motion, the lower arm, and the upper arm follow the trajectories equation (33). The robot’s system parameters are also mentioned in the “Results of applied computed force/torque compensator” section. In the results shown in Figure 5, the dashed lines (a2) and (b2) in Figure 5(a) and (b) obtained by the adaptive compensator stand for position error variations of the mobile base translational motion (x) and the lower arm orientation angle (θ 1), respectively. The results show that the adaptive compensator bounds the tracking errors.
Comparison of two compensators
Since the results described in the “Results of applied computed force/torque compensator” and “Results of applied adaptive compensator” sections show that both compensators minimize and bound the errors occurring when the mobile robot system follows the sinuous shape path shown in Figure 3(a), the subsequent types of external disturbances used in the comparison of the two compensators were applied to the robot system. Stability simulations are performed by applying an additional tipping disturbance noise to the mobile base following the desired trajectory, and by changing the load mass on the end-effector as follows.
Application of additional tipping disturbance noise: It is assumed that when the mobile robot passes a protruding obstacle with convex shape (Op
) on a sinuous shape path θbd
for a short time as shown in Figure 3(a), an additional tipping disturbance noise θbn
can be generated, or the manipulators with the load on the end-effector heavily leaning to one side for a moment, as shown in Figure 3(b), can generate the tipping disturbance noise θbn
. When additional tipping disturbance noises θbn
(t) are applied at t = 5 and 5.9 s to the robot system that follows the trajectory θb
d(t) in equation (33), namely approximately 7.9° and 7.3° (generated from

Stability and energy variations for tipping disturbance noises
Among the four pulses (a1)–(b2) in Figure 6, the solid line pulses (a1) and (a2) generated by the tipping disturbance noises cross over the boundary (
Application of load mass change: When the robot’s end-effector carries the loads with two different masses ml
= 1.4 and 2.9 kg, then the solid line curves (a1) and (b1) in Figure 7(a) and (b) represent energy variations of the robot system generated by the computed force/torque compensator for ml
= 1.4 and 2.9 kg, respectively. Meanwhile, the dashed line curves (a2) and (b2) in Figure 7(a) and (b) stand for energy variations of the robot system generated by the adaptive compensator for ml
= 1.4 and 2.9 kg, respectively. Figure 7(a) and (b) shows that the robot system is stabilized by the two compensators. But, due to the advantages of the adaptive compensator’s algorithmic characteristics described below, the dashed line curves (a2) and (b2) generated by the adaptive compensator are placed at more negative values (meaning more stable) than the solid line curves (a1) and (b1) generated by the computed force/torque compensator. In addition, Figure 7(b) shows that as the mass of load, ml
, increases to the maximum carrying capacity that the robot system can handle, both curves (b1) and (b2) place at more positive values (meaning less stable) and approach to the boundary (
Results of comparison: While the computed force/torque compensator algorithm is much simpler than the adaptive compensator algorithm, the difference in the results received is not much since both compensators can successfully stabilize the mobile robot system when subjected to external disturbances. The advantage of the adaptive compensator over the computed force/torque compensator is that it uses the Lyapunov technique as a powerful stability tool, and the adaptive parameter scheme maintained high performance despite the changing system parameters. As the consequence, the adaptive compensator should have a higher rate of success than the computed force/torque compensator. However, the performance of the adaptive compensator can be affected by factors that include estimated values of known nominal values for system parameters, adaptive elements, and accurate system dynamics.

Stability and energy variations for load masses (a) ml = 1.4 kg and (b) ml = 2.9 kg: (a1/b1) computed force/torque compensator and (a2/b2) adaptive compensator.
Comprehensive comparison with other methods
The global stability of mobile base robot is important, since a mobile robot base combined with manipulators carrying loads under various types of external disturbances should never tip over at any moment. Continued research endeavors 20 –24 have been made to improve the mobile robot system stability for various workplaces including manufacturing areas. As part of these research endeavors, 20 –24 proposed mobile robot stabilization techniques such as collective behaviors of mobile robots by applying an acute angle test-based interaction rule, active anti-roll system and its associated controller for autonomous mobile robot, and hybrid-type mobile robot to achieve better stability. However, their algorithms are limited on a local stability of robot systems and are accompanied with a high degree of computational complexity. These algorithmic characteristics certainly reduce the stability of the whole system.
Meanwhile, in this article, a system energy function, derived based on LaSalle’s theorem to ensure a global asymptotic stable system, as a powerful stability tool is used to analyze mobile base robot stability. The advantages of the method of system energy function are as follows. First, the proposed method maintains high performance despite effects of external disturbances as well as change of system dynamics; therefore, it should provide more stabilized robot system than the previous methods. Second, the proposed method can be not only a useful tool to grasp the degree of control system stability but also simply derived with relatively less computational complexity as described in the “Energy function of the robot system” section . This indicates significant improvement in the stability analysis of mobile robot systems, as illustrated in Figures 6 and 7.
Conclusion and future works
Contributions of this article are as follows. First, a system energy function is used to analyze mobile base robot stability. For a mobile base robot with manipulators subjected to external disturbances, the correlation between stability and energy variations in control strategies is described. The correlation results can be used to stabilize and control problems for mobile base robots subjected to various types of external disturbances. Second, the two applied compensators, the computed force/torque and the adaptive compensators, are compared through simulations performed by applying external disturbances to the robot system.
The results clearly show the correlation between stability and energy variations in the robot system. The proposed methodologies can be applied to a variety of robot tasks, such as choosing and placing, manufacturing, and controlling operations in workspaces with protruding obstacles on sinuous shape paths. The following should be addressed in as future works. It is necessary to extend the proposed technique to the stabilizing control problem for mobile base robots with manipulators subjected to external disturbances using more than four degrees of freedom in robot joint movements and different compensators such as robust and intelligent controllers.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.