
Abstract
It is important to have reasonable task coordination and path planning in rescue operations after a large-scale urban disaster. Whereas, there are many problems which can hamper rescue operations, such as communication obstacles, collapsed buildings, and secondary disaster. This article proposes a novel approach named ISODATA-K to achieve the task coordination and execution with heterogeneous ad hoc multi-agent. Inspired by the clustering analysis, ISODATA-K method, which does not require any input and threshold parameters, assigns the rescue agents to every area of the damaged city adaptively and efficiently. When the rescue agents get respective task, the path planning is done by A* algorithm which costs little time to find the relatively short route. The results of experiments demonstrate that the proposed method allows satisfactory rescue operations.
Introduction
In recent years, with the rise of artificial intelligence, multi-agent system (MAS), which is an important branch, has been widely considered. With the characteristics of autonomy, distribution, adaptability, coordination, robustness, and flexibility, the MAS is widely used in unmanned aerial vehicle (UAV) formation, sensor networks, collaborative monitoring, and other fields. It provides a more efficient solution for the large-scale complex problems. 1 –6
As a typical representative application of MAS, urban disaster rescue is faced with many problems, such as complex disaster scene, secondary disaster, and many other issues. It is full of high uncertainty and risk for human beings to do the rescue tasks. Researchers recommend using robot agents instead of humans to carry out urban disaster relief work to overcome difficulties and reduce losses. And the single robot agent has been used for search and rescue tasks in some earthquakes, for example, 2013 Fukushima nuclear disaster. 7,8 Since the rescue time is valuable and the constraints are various, the single robot agent does not fully meet the requirements of the rescue task. Using multi-agent coalition for the rescue is under study by more and more researchers.
Multi-agent task coordination is the well-studied topic in urban disaster rescue. 9 –11 The solution to multi-agent task coordination is divided into centralized and decentralized. 12 –14 A center system is required for the centralized methods to collect information, evaluate task, make decision, and so on. 12 –14 But, in an urban disaster, the environment is dynamically changing, communication may be interrupted at any time. Even if the communication is not interrupted, there are so much information to be transmitted. The center system requires very high bandwidth to share information, it is not robust but is problematic. Because of these deficiencies, decentralized methods are more widely used. Liemhetcharat 15 modeled a weighted synergy graph for effective team formation, and the agent can choose the most suitable partner for rescue teamwork. Auction is another method for task coordination, the agent sends its bid, bidder agents respond, and the sender agent assigns each task to the most adequate bidder agent. 16 Though there are some decentralized methods for multi-agent task coordination in urban disaster rescue, they ignore that the search and rescue field is much large in an urban disaster, the communication problem for decentralized methods still exists, and the problem can drastically reduce the performance of above approaches.
To solve the above problems, a clustering-based method is more efficient. Hamid Emadi 17 proposed a method for target-tracking based on partitioning strategies, he divided the monitoring area into several regions and assigned the guard into these regions for monitoring. Once the intruder appeared, it was visible to at least one guard at all times. Feng Wang 18 used cluster method on wireless sensor networks. It was generally known that the ability of a single sensor node was limited, they could only perform tasks well by collaborating with each other. Because of this, Feng Wang organized many sensor nodes into clusters and the service ability of each cluster was calculated. By choosing appropriate task for a cluster, the method is much more efficient. Farzam Janati 19 partitioned the tasks based on the number of robots, then each cluster had their own robots. And in each cluster, the robot could execute task in a high efficient time.
In this article, clustering-based task coordination is used. Each agent is assigned into a local area by the proposed novel clustering approach and the agents with different characteristics form a coalition. Different coalitions are responsible for searching their respective regions and then move to another region. Thus, the communication requirement is reduced and search field also becomes larger, the agent can work in its own area and only communicate with other agents when it is necessary. It is a static assignment and dynamically adjust process. The article uses A* algorithm for path planning after clustering. The A* algorithm can ensure that the agent moves to the destination as soon as possible. The article is arranged in six sections. Following the introduction, the second section presents the short review of clustering, it mainly introduces K-means and ISODATA algorithm and analyzes the deficiencies of them. The third section proposes a novel clustering approach which is named ISODATA-K. The task coordination and path planning for multi-agent coalition in urban disaster with ISODATA-K is presented in the fourth section. Experiments are given in the fifth section to illustrate the performance of the proposed method and the sixth section presents the conclusion.
Short review of clustering
Clustering is the process for dividing a given set of data into clusters. The data set with high similarity is gathered into the same cluster, and the similarity of the data set between different clusters is very low. Because clustering is simple and effective, it has been widely used in the fields of image classification, text analysis, multi-objects detection, and so on. 20 –22
K-means is the most common clustering method. 23 It first randomly chooses K (the number of clusters) points as the initial cluster centers, then divides other data into the corresponding initial center based on certain features, and computes the new centers until the algorithm converges. Compared with the other clustering methods, K-means is much simpler and easier to understand.
Another common clustering method is ISODATA (Iterative Self-Organizing Data Analysis) algorithm. 24 Different from the K-means, this method does not require the value of K as the default input and it clusters data set into clusters dynamically by merging or splitting operation, the ISODATA algorithm controls the number of clusters by some threshold parameters.
For the K-means algorithm, the first problem is that the number of clusters is required firstly, different values of K will lead to different results. Luckily, ISODATA algorithm solves this problem, 25 it computes reasonable value for K by setting threshold parameters. Table 1 shows all the threshold parameters and their meanings. The main parameters which influence the splitting and merging operation of ISODATA algorithm are θn, θs, and θc. θn is given by experience. L and I have a low influence for results, they can be given against reality. Thus, the most important threshold parameters are θs and θc. These two threshold parameters decide the final performance of clustering, but it’s disappointing that these threshold parameters are required to be added manually, which is problematic.
Threshold parameters.

Besides, both K-means and ISODATA have another problem. The initial centers for clustering both of them are chosen randomly. Different initial centers will lead to different results and cause the local maximum.
A novel clustering approach
The novel clustering approach named ISODATA-K of this article improves ISODATA algorithm and solves the problems of both K-means and ISODATA algorithm. It also does not require the value of K, the value is computed by itself. Better than K-means and ISODATA, it does not need to add any parameters manually, the parameters are computed automatically.
First, it computes average distance


where θs is the expected standard deviation based on distance, θc is the expected minimum distance between each two clusters. The data are assigned to the closest center z as new cluster by equation (3), then

Choose initial centers.

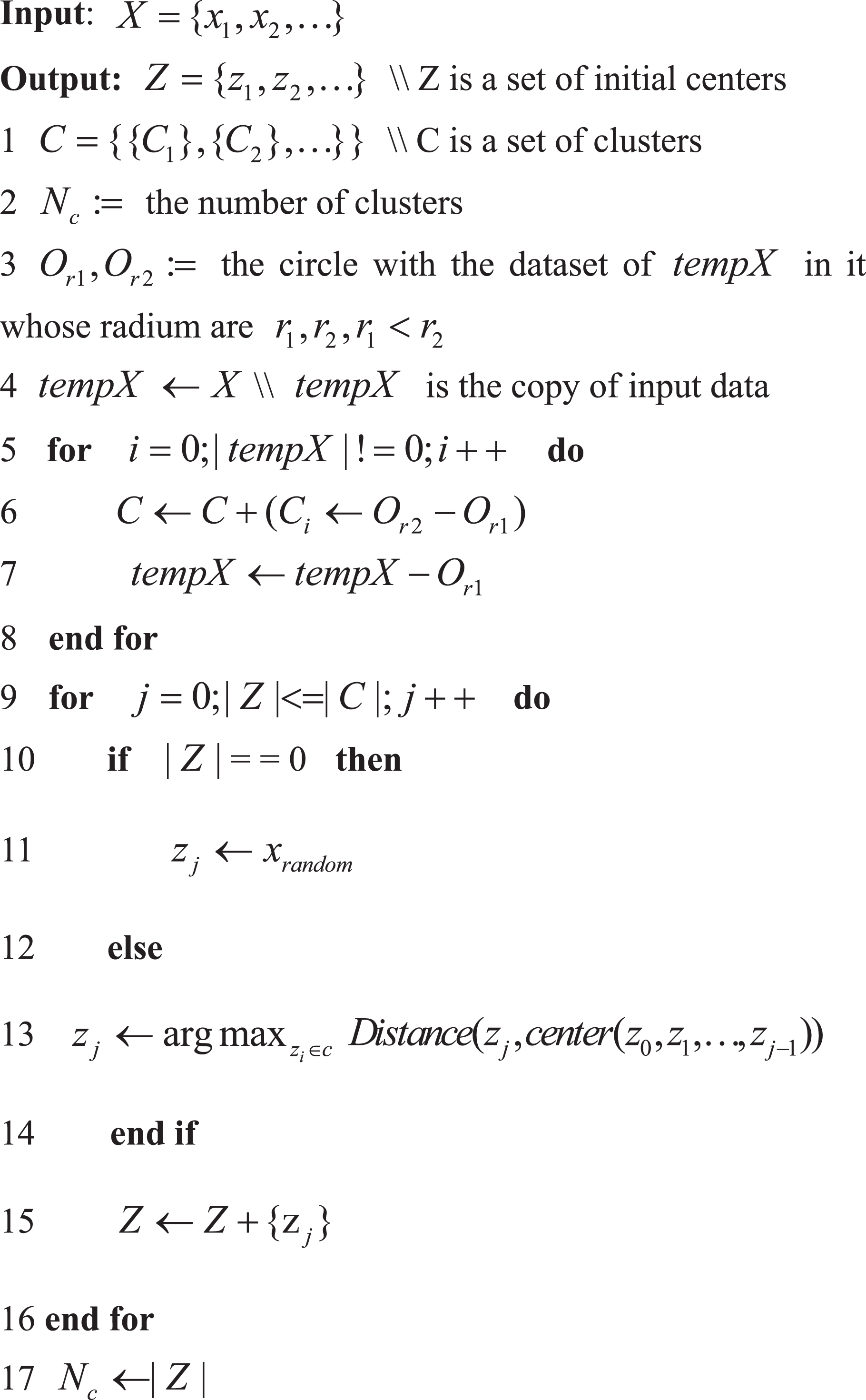
If the number of data in a cluster is less than θn, the cluster will be removed and the algorithm will repeat to assign data again with




where
Alternatively, if the number of iteration is odd or the number of data is too many in a cluster, the standard deviation vector and vector component are computed


where i is the dimension of feature vector,
Update Clusters.


Task coordination and path planning for multi-agent coalition in urban disaster rescue
Problem description
In urban disaster rescue, heterogeneous ad hoc multi-agent coalition are responsible for clearing blockade, putting out fire, and treating the wounded. In this article, the multi-agent coalition are made up of police force, fire brigade, and ambulance agents. These multi-agent coalition will search and rescue around the whole city. For different cities, big or small, the main problem is described as the multi-agent task coordination problem during the rescue, and for limited number of agents, it is critical to assign them to different areas reasonably.
Usually, because the area of disaster city is too large, it is practically impossible to assign a limited number of agents to every corner of the city in such a short time. It is impossible for a single agent coalition to search and rescue in the whole city with limited time and it is inefficient that several agent coalition perform tasks in a certain small area at the same time, which means more blank areas will remain. Therefore, this article proposes a novel clustering method for task coordination. The buildings are treated as a serial of points and they are divided into varying density of architectural complex. A certain number of agent coalition will be assigned to various regions. With this method, the search and rescue efficiency is improved and the scope is also expanded.
Clustering-based task coordination for multiple agents
According to the novel clustering ISODATA-K method, the city will be divided into several areas. Thus, the first thing is to assign agents to these areas. The article firstly divides city buildings into K clusters. Each type of agents will assign to the cluster. In some particular case, the agents will be too few, the article will merge the cluster according to the size of area until the number of cluster is equal to a certain kind of fewest number of agents. In general, the number of clusters is less than the agents, the number of each type of agents in each cluster is determined by the ratio of the cluster area and the whole city area, the equation is shown as following

where Ac is the area of a cluster and At is the area of the entire city. Na is the total number of a certain kind of agents, Nf is the number of initial free agents that can respond to urgent requests from more areas. After getting the number of agents for a cluster, the article will compute the distance from the agent to the clusters and assign agent to the closest cluster center. If one cluster is assigned enough agents, the article assigns the new agent to the second closest cluster, and so on, until all clusters are assigned completely. Then, the agent moves to their own cluster for search and rescue tasks. The agent will move to another subregion after searching for the subregion that it is responsible for.
In the real world, the houses will collapse, roads will be blocked, and other unknown situation will occur after the disaster, according to the actual situation. Only the rescue coalition can reach the disaster scene as soon as possible in such a dynamic and changeable environment, so as to reduce the loss of people’s lives and property as much as possible. Therefore, in-depth study of path planning can save rescue time, increase rescue speed, and ensure that rescue coalition can efficiently complete tasks within a limited time. Considering the affected area of the city is large, the time of rescue is emergency and the scene situation is changeable. The article uses the heuristic A* algorithm whose search result is related with utility function. 26 The algorithm combines the characteristics of breadth first search and Dijkstra algorithm, it can search toward the target point and find the shortest path instead of searching the entire road network.
Simulations and experiments
Introduction to experimental environment
The simulation platform named RoboCup Rescue Simulation System 27 (RCRSS) is a distributed system that simulates a realistic urban post-disaster scenario and introduces evaluation mechanism for different strategies. Figure 1 shows the basic post-disaster scenario map named Test on the simulation environment. The deep gray polygons and light gray polygons represent respective buildings and roads. The black on the roads are the impassable blockages. The colorful polygons are firing buildings. The house in the building is refuge for taking in the wounded and providing energy for multi-agent coalition. The blue, white, and red circles, respectively, represent police force, fire brigade, and ambulance agents, and they can be operated by researchers. The green circles are civilians, they cannot be controlled, and just move to refuge randomly by themselves. For the three types of agents and civilians in this platform, they have their own abilities; Table 2 shows these abilities.

Clustering result.
Abilities of agents.

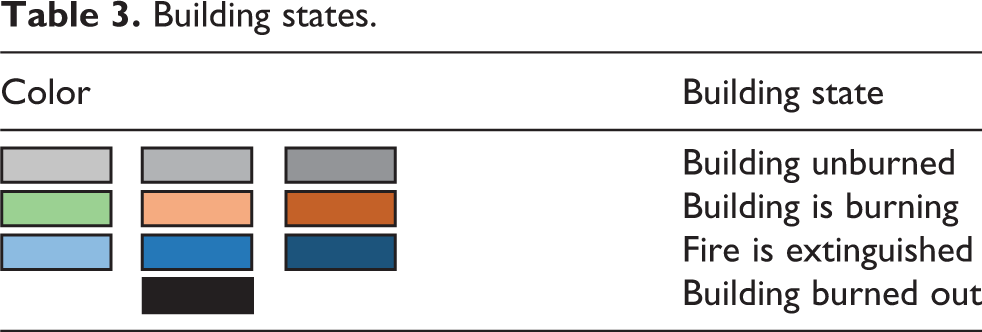
Each heterogeneous ad hoc agent is responsible for different tasks. The police force agent is responsible for clearing blockade, fire brigade agent is responsible for putting out fire, and the ambulance team agent is responsible for treating the wounded. Table 3 shows the different color buildings and the meaning of them. Similar to the situation that fire may occur in the real world, simulated buildings have different degrees of burning state, and fire extinguishing may also bring secondary disasters. And with the burning of the building, the temperature will continue to rise, the fire will continue to spread around.
Building states.
Validation of the proposed method
First, the article tests the adaptability of ISODATA-K clustering method, the map named Test is used for experiment. The L is set as 2, I is set as 5, and the θn is set as 20, and the number of three types of agents is 2. Figure 1 shows the intuitive result. On the map Test, the blue, white, and red circles represent heterogeneous ad hoc agents, and the green are civilians. Other colorful circles are the central of buildings. From the result, the buildings are divided into two clusters and the yellow circles are the central of clusters. Thus, it can be seen that the novel clustering method chooses the initial center and the number of clusters adaptively, the method has a good performance.
In RCRSS platform, it gives a score to evaluate the quality of the method of heterogeneous ad hoc agents. The score can be expressed as equation (11)

P represents the total number of surviving rescue agents and civilians in each time slice. S indicates the total heath of all agents at current time slice, and
The final score is mainly determined by the survival agents and unburned area of the buildings after 300 time slice simulation. So, the article evaluates the performance by dead agents and burning buildings. As for different types of agents, the key problem is how to choose reasonable tasks and cooperate with other agents. And it is most important for police force rescue agents to clear the blockades on the road, because the other rescue coalition can arrive at their destinations successfully only if the roads are unblocked. The less the time costs, the more the rescue opportunities will be. So another indicator is the rate of clearing blockades, and it is of uppermost priority.
In Figure 2(a), the police force agent is collaborating with a fire brigade agent A, it helps the fire brigade agent get through the road to the fire building. When blocked roads were dredged, the agent A puts out fire immediately. After helping the fire brigade agent A, the police force agent becomes a free agent, and it goes to find another task in his own cluster. In Figure 2(b), it receives the distress signals from another fire brigade B, so it responds to the fire brigade B and clears the blockades that trap the agent B. Figure 2(c) to (f) shows a continuous search and clear process.

The process of search and rescue.
The article tests the efficiency of novel method based on novel ISODATA-K clustering method and A* algorithm according to above three indicators. The article uses map named Kobe2013 for testing, and our own NPUbase code is used as basic code. The experimental results are shown in Figure 3. In Figure 3(a) to (c), X-axis represents 300 simulation time slice, and Y-axis respectively represents the percentage of clearing blockade, dead civilian, and totally burned building at each time slice. The article computes the real-time percentage by

Results of three indicators. (a) Percentage of clearing blockades, (b) percentage of totally burned buildings, and (c) percentage of dead people.
In Figure 3(a) to (c), compared with original method which has no cluster and only uses BFS for path planning and novel method, the police force agents, using novel ISODATA-K method, clear blockade much faster, the fire brigade agents get the fire under control, and the ambulance agents save more life.
Figure 4 shows an actual result by using original method and ISODATA-K method, colorful polygons represent buildings which are burning or extinguished and black buildings represent buildings burned out completely. As shown in the map, the number of police force agents, ambulance team agents, and fire brigade agents is 16, 19, and 21, respectively. In Figure 4(b), the map is divided into 15 clusters by the novel ISODATA-K clustering method, the agents are assigned into each cluster more reasonably. With the development of simulation, the buildings laid at lower-left corner has been burned out and traverse through almost completely, so the police force agent, ambulance agent, and fire brigade agent adjust cluster dynamically, more agents move to the other clusters for more tasks. In Figure 4(a), the rescue agents did not find the source of the fire in time, which caused the fire to be too large to control. Almost all buildings were burnt, so after 300 simulated time slices, most people died. By contrast, in Figure 4(b), the fire source is found in time and the spread of the fire is under control, so the burned buildings are less after 300 simulation time slice. Compared with Figure 4(a) and (b), the blue police force agent is more distributed, covers more of the city, and clears more blockades. Thus, the fire sources are found in time, the fire brigade agents and ambulance agents can reach to their destination faster, and obtain a better performance.

Comparison of actual results. (a) Actual result by using original method and (b) actual result by using novel method.
To further verify the effectiveness of the method, the article uses A* algorithm for path planning, and uses K-means, ISODATA, and this ISODATA-K method. The parameters are the following: K = 5, 10, 15; L = 4; I = 50; θn = 63. The article does 100 times of experiments with each clustering method and original method. Table 4 shows the static result, the performance of the task coordination based on ISODATA-K is much better than original method, and it is also slightly better than ISODATA and K-means (K = 10). Whereas, when parameters are not appropriate, like K = 5 and K = 15, the performance is worse than the ISODATA-K. By contrast, the ISODATA-K method does not require any value of K, θs, and θn. The ISODATA-K clustering method not only gets reasonable value of K but also chooses initial center well, so it performs better. Table 4 shows that the ISODATA-K method improves the performance of rescue on the Kobe2013 map. In order to validate the adaptability on other simulation scenarios, this article runs the experiments for 100 times on another 10 maps named Berlin, Mexico, and so on.
The percentage for three indicators.
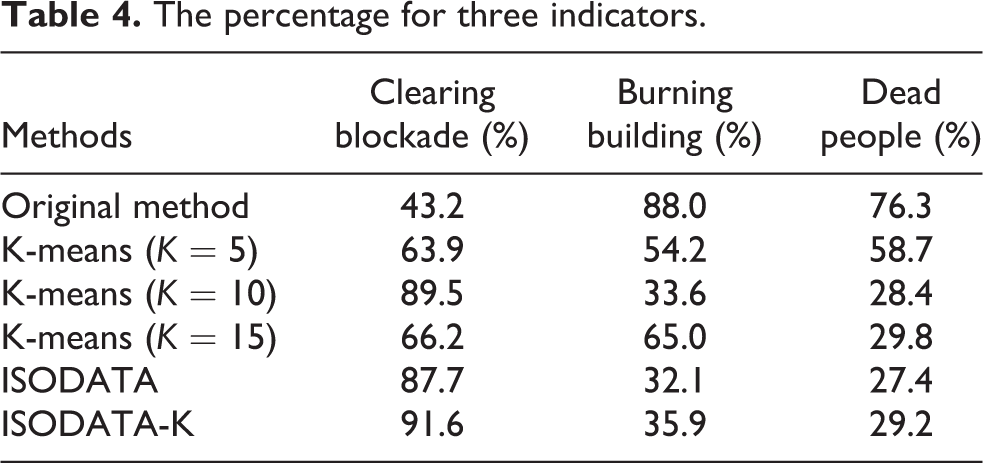
Figure 5 shows the average score on 10 different simulation maps. In Figure 5, X-axis represents the city name of 10 maps, Y-axis represents the final average score. The score of the ISODATA-K clustering method is always highest compared with the original method. And on the Kobe2013 and Istanbul, which have too many blockades on the city, the key blockades were cleared in time, so the fire brigade agents put out fire and got the fire under control, and ambulance agents saved more life.

Average final score comparison.
Conclusions
Considering the affected area of the disaster city is large and communication is blocked or interrupted, a novel clustering method named ISODATA-K for task coordination with multi-agent coalition is proposed in this article. By combining the traditional K-means with ISODATA clustering methods, the novel method not only can compute the number of clusters adaptively, but also can choose reasonable initial centers of clusters. When the tasks are allocated, the A* algorithm is used for path planning and the agent can find the shortest path in the least time. According to the results, the novel method has a better performance in rescue operations, the method expands search scope, reduces competition between agents and shortens execution time, and it has a certain role in promoting the task coordination of multi-agent coalition and a satisfactory path planning effect.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research work was supported by National Natural Science Foundation of Shaanxi (No. 2015JM6308), Aviation Science Foundation (No. 2016ZC53022), and Graduate Starting Seed Fund of Northwestern Polytechnical University (No. Z2017231).