
Abstract
A multi-robot system in resource-constrained environments needs to obtain resources for task execution. Typically, resources can be fetched from fixed stations, which, however, can be costly and even impossible when fixed stations are unavailable, depleted or distant from task execution locations. We present a method that allows robots to acquire urgently required resources from those robots with superfluous residual resources, by conducting rendezvouses with these robots. We consider a scenario where tasks are organised into a schedule on each robot for sequential execution, with cross-schedule dependencies for inter-robot collaboration. We design an algorithm to systematically generate such rendezvouses for entire multi-robot system to increase the proportion of tasks whose resource demands are satisfied. We also design an algorithm that periodically reallocates tasks among robots to improve the cost-efficiency of schedules. Our experiment shows the synergetic effectiveness of both algorithms, when fixed stations are unavailable and all resources are fetched through inter-robot delivery. We also investigate the effectiveness of inter-robot delivery in scenarios where fixed stations are existent but distant from the locations of tasks.
Introduction
The application of multi-robot systems (MRSs) is rapidly growing, due to their capability of performing large amount of tasks more efficiently and robustly than individual robots, in a collaborative manner. During task execution, an MRS often needs to consume certain resources, for example, electric power or fuels, tools or materials, or even abstract resources such as empty spaces. In certain scenarios, robots can fetch resources from fixed resource stations in the environment. However, in such cases when such fixed stations are unavailable, depleted or distant from the locations where the robots perform their tasks, fetching from fixed stations is either infeasible or costly, making it preferable to have robots deliver resources to each other, so that the robots in urgent demand of resources can find nearby robots that happen to possess these resources and conduct rendezvouses with these robots to acquire these resources.
Our research is related to the domain of multi-robot task allocation (MRTA) that aims to optimise assignment of the tasks to a set of robots in terms of overall performance (utility) of the MRS. In many MRTA researches, for example, that presented by Vig, 1 Zhang, 2,3 Chen and Sun, 4 Maoudj et al., 5 resources refer to (1) functional parts of robotic system, for example, sensors, actuators, controllers or software modules, (2) standalone indivisible objects used for task execution. In such cases, robots typically need to form coalitions to perform tasks collaboratively, which allows sharing resources among robots. In contrary, our research concerns consumable resources, for example, energy resources, vehicle capacity or materials, whose amount may change as a result of task execution.
Current MRTA approaches deal with consumable resources by representing resource usage in the construction of MRTA problem. Lee 6 presents a resource-oriented MRTA approach considering multiple types of resources, fixed resource stations and limited robot communication range, which considers resource consumption and cost of resource acquisition while allocating tasks. Nam 7 deals with inter-robot resource contention, that is, the situation in which multiple robots use the same resource. Their method penalises contentions in the computation of total utility of the MRS, to reduce contentions. Kim 8 presents the concept of resource welfare, which enables market-based MRTA method to optimise collectively (1) average residual resources of each coalition and (2) the balance of resources among coalitions. 9 Wu 10 introduces Gini coefficient into market-based MRTA, for measuring the balance between resource consumption and task completion, to retain as many resources as possible to complete more tasks. The majority of researches about resource-constrained MRTA consider the residual resources of robots to be static rather than dynamically rechargeable. For those research studies that consider rechargeable resources, they typically assume the resources are fetched from fixed resource stations rather than allowing inter-robot delivery. This limits the application of these methods in such scenarios when fixed resource stations are unavailable, depleted or distant from task locations. In addition, most research studies do not consider the influence of cross-schedule dependencies (e.g. precedence constraints and/or rendezvouses) on resource acquisition. These dependencies are more common when relations among tasks become more complex in real-world scenarios.
In addition to MRTA research studies considering resource consumption, there are research studies that focus specifically on planning or scheduling problem of resource recharging, as exemplified by: (1) optimal unmanned aerial vehicle (UAV) refuelling scheduling, by Jin 11,12 ; (2) aerial fleet refuelling, by Barnes 13 ; (3) satellite servicing scheduling, by Shen 14 ; (4) energy-efficient inter-robot rendezvous, by Litus 15 ; (5) rendezvous-based robot recharging, by Mathew. 16 However, these researches usually explicitly separate the charging stations from robots executing ordinary tasks, rather than allowing robots to exchange resources. They also rarely consider the dynamic interplay between recharging planning and task reallocation.
In this article, we consider the case when an MRS performs tasks in a time-extended manner, with each robot executing a schedule composed of a sequence of tasks in the given order. The schedules enable robots to dynamically plan their task execution in a long-term manner, according to the priorities of different tasks, their locations in the physical environment and the constraints among them. Each task corresponds to one location in the two-dimensional space and requires the robot to perform certain operations at the location, which will cost the robot certain amount of resources. According to the taxonomy by Gerkey et al. 17 and Korsahk et al., 18 our work overlaps with the single-task (ST) multi-robot (MR) time-extended assignment (TA) with cross-schedule dependencies (XD [ST-MR-TA]) category of MRTA problem. In specific, our research is related to the MRTA problem in resource-constrained environment in which each task requires certain resources for execution, and the completion ratio of assigned tasks is a major optimisation objective of the MRTA problem.
We use the concept of feasibility (the schedule(s) of each individual robot or of entire MRS) to describe the extent to which the tasks in the schedule(s) can be successfully executed because their resource demands can be satisfied by the residual resources of each robot. Robots can persistently maintain the feasibility of the schedule(s) by conducting inter-robot delivery which transits resources among robots. Inter-robot delivery is expected to be conducted in a coordinated manner, to ensure the following qualities of feasibility maintenance.
Monotonic improvement of feasibility. The feasibility of different schedules should be improved monotonically, that is, the feasibility of any schedule cannot be improved at the expense of the feasibility of another schedule. For example, consider delivering resources from robot
Compliance with constraints among tasks. Real-world tasks are usually not independent of each other; instead, there are typically constraints among tasks, regulating how tasks scattered in the MRS work integrally. We consider two types of constraints among tasks, including (i) precedence constraint, which requires the completion of one task to precede the commencement of another task; (ii) rendezvous, which requires multiple tasks to be performed at the same time and location through close inter-robot collaboration. These constraints regulate in what order should the resource demands of tasks be satisfied.
Deadlock-free schedules. Deadlock is such a situation in which a cycle is formed by the relations among tasks waiting for each other to finish, blocking the execution of successive tasks. The relations forming a deadlock include the aforementioned precedence constraints and rendezvouses, as well as the execution order of tasks within each schedule. In particular, since inter-robot delivery requires rendezvouses between robots, an improper rendezvous may result in the deadlock among multiple schedules. To ensure the smooth execution of the schedules, we must take precautions to prevent inter-robot delivery from introducing such deadlocks.
Cost-efficiency of MR schedules. The execution of the schedules is typically expected to be cost-efficient, that is, at as low cost as possible. The total cost of schedules depends on the cost of executing each task and of transiting between tasks. With the introduction of inter-robot delivery, the cost of entire MR schedules can be divided into following parts: (i) the cost of executing ordinary tasks, (ii) the cost of performing rendezvouses for inter-robot delivery and of transiting between ordinary tasks and the rendezvouses. Both parts are expected to be reduced at runtime, without having significantly negative effect on feasibility maintenance.
In this article, we present a method of inter-robot delivery for improving the feasibility of MR schedules. We propose an algorithm (Algorithm 1) that generates rendezvouses for inter-robot delivery. Algorithm 1 ensures (i) no deadlocks will be introduced; (ii) monotonic improvement of the feasibility of each schedule; (iii) compliance with inter-task constraints, by enforcing the resource demands of the tasks being satisfied in particular order according to inter-task constraints. Algorithm 1 also dynamically selects the nearest available resource provider in the vicinity of a robot to minimise the cost for inter-robot delivery. The capability of Algorithm 1 in preventing deadlocks and ensuring monotonic improvement is theoretically proven. We use an experiment (‘Effectiveness of inter-robot resource delivery for maintaining feasibility’ section) to show the effectiveness of Algorithm 1 in improving the feasibility of MR schedules. The role of Algorithm 1 for MRS can be seen as redistributing resources among robots according to the distribution of resource demands on robots. In addition, we present an algorithm (Algorithm 2) which is capable of repeatedly reallocating the tasks to different positions in the MR schedules to incrementally reduce the cost for inter-robot delivery and seek to reallocate the tasks to robots with sufficient residual resources so that it may not need inter-robot delivery to satisfy the resource demands of these tasks in the first place. The role of Algorithm 2 for MRS can be seen as redistributing resource demands (of tasks) among robots according to the distribution of residual resources on robots. We use an experiment (‘Effect of persistent task reallocation on inter-robot resource delivery’ section) to show the effect of combining Algorithm 2 with Algorithm 1 on the effectiveness of Algorithm 1. For the scenarios when the fixed stations are available but distant from the task locations, we use an experiment (‘Effectiveness of inter-robot resource delivery in scenarios with fixed resource stations’ section) to show the effectiveness of Algorithm 1 together with Algorithm 2 in providing resources with lower cost.
The remainder of this article is organised as follows. Second section describes related work. Third section presents the research problems of this article. Fourth section presents the feasibility maintenance algorithm and the task reallocation algorithm. Fifth section presents the experiment results. Sixth section presents the conclusion and future work. Symbols used throughout this paper are defined in Table 1.
Table of symbols.
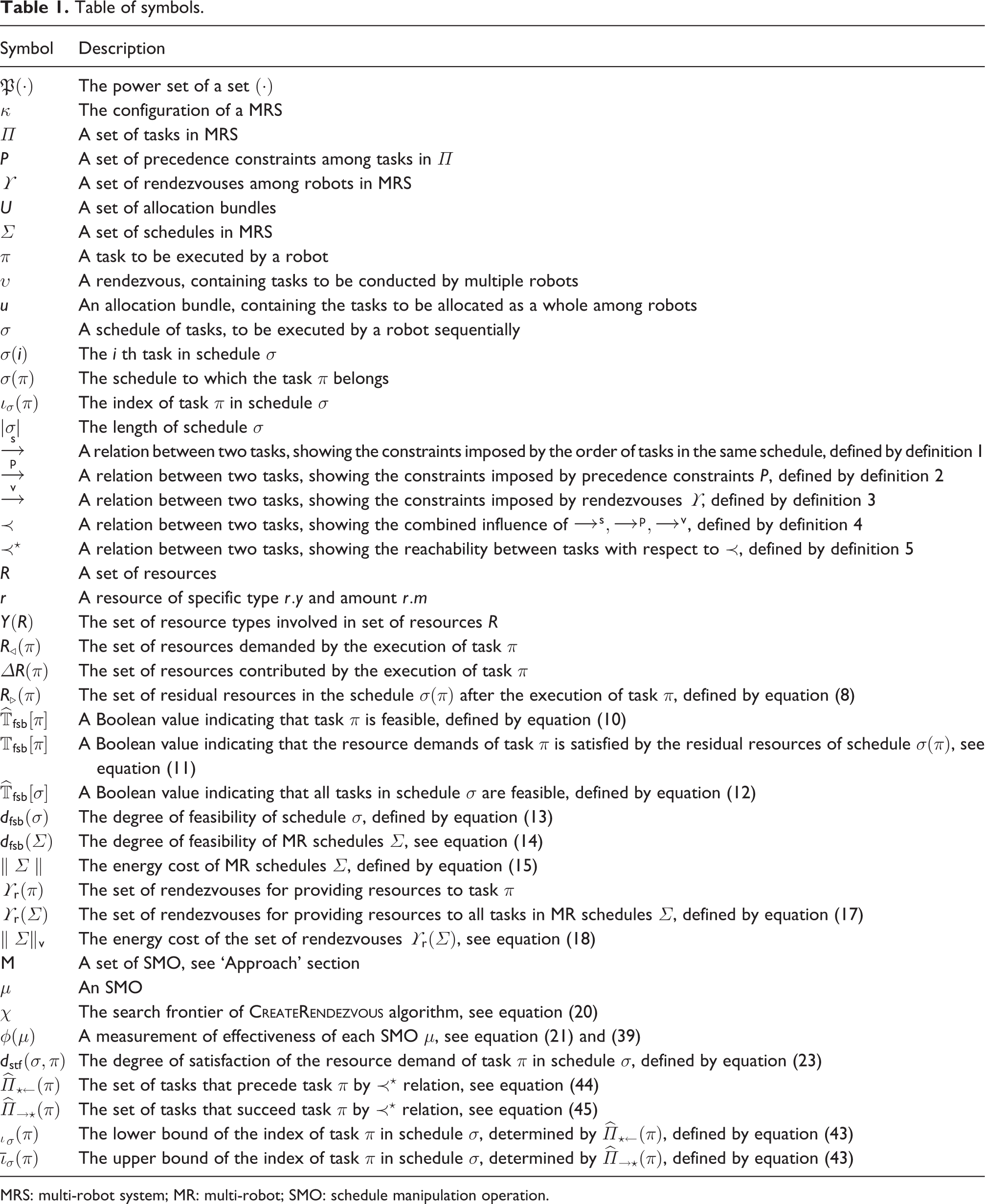
MRS: multi-robot system; MR: multi-robot; SMO: schedule manipulation operation.
Problem statement
In this section, we present the model of an MRS (‘Task-level model of multi-robot system with cross-schedule dependencies’ section), which depicts the composition of the schedules of the MRS and the cross-schedule dependencies that need to be respected during the execution of the schedules and the inter-robot resource delivery. Based on this model, we define two major optimisation objectives to be achieved by inter-robot delivery: (1) feasibility, which refers to the proportion of the tasks (in the MR schedules) whose resource demands are completely satisfied, and (2) cost-efficiency, which refers to the capability of the MR schedules to be executed with relatively low cost. It finally presents the problem statement based on these optimisation objectives.
Task-level model of MRS with cross-schedule dependencies
In this section, we present the model of the task level configuration of the MRS, which consists of the set of tasks and the constraints among tasks. These constraints regulate the execution of the tasks and the satisfaction of the resource demands of the tasks and form the basis of the cross-schedule dependencies among tasks.
18
The configuration of a MRS can be described as a tuple
For the MR schedules Σ to be executed smoothly, the tasks in Σ should satisfy the following conditions: (1) the positions of tasks in Σ should comply with the constraints imposed by P and ϒ. (2) There should not be any deadlocks in Σ. To facilitate the representation and analysis of these conditions, we define the following relations, as shown in definitions 1, 2 and 3.

where for any
By definition 1, for any tasks

By definition 2, for any task

By definition 3, for any task
Definition 4 defines a relation

Based on the above relation ≺, we can recursively define the relation

For any
We now present the condition which guarantees that the schedules Σ are without deadlock, that is, there are no cycles formed by multiple tasks (possibly from different schedules) waiting for each other to finish. We first define the concept of Σ being cyclic, that is, there exist such cycles among tasks in Σ, as shown in definition 6.

where each task π being cyclic is defined by definition 7, based on the relations

Note that as long as Σ is not cyclic, all the tasks in Σ must also satisfy the constraints imposed by P and ϒ.
Feasibility of MR schedules
The main objective of inter-robot delivery is to improve the feasibility of the MR schedules Σ, that is, the degree to which the resource demands of the tasks in Σ are satisfied by the residual resources of the robots. We first introduce the representation of the resources to be consumed by tasks or provided by robots. Each resource r is defined as a tuple
In this article, we assume resources are linear and define their following operations for a single resource: (1)
We further define the following operations for any two sets of resources
For any two sets of resources
For each schedule

where

and
We now introduce the concept of feasibility for tasks and schedules. For each task π, the Boolean value

where

For each schedule σ, the Boolean value

The ideal situation is when all the schedules are feasible. However, for a schedule σ, it is possible that only the resource demands of some tasks in σ are satisfied, that is σ is partially feasible. To represent such situation, we introduce the concept of degree of feasibility, represented by function

It is obvious that (1) when
We now present the degree of feasibility of entire MRS,

It is obvious that (1) when all tasks on all robots are feasible,
Through inter-robot delivery, for each task
Problem I. How to improve the degree of feasibility of the MR schedules via inter-robot delivery, so that (1) feasibility of different schedules are improved monotonically, (2) no deadlocks will be introduced through inter-robot delivery.
Cost-efficiency of MR schedules
The cost-efficiency of the schedules is a measurement of performance of the execution of the MR schedules, provided that the schedules are consistent. An MRS is usually expected to execute its tasks with higher cost-efficiency, that is, at as low cost as possible. When the tasks are arranged in time-extended MR schedules Σ, the cost of Σ, denoted as

where (1)

Reducing

where
To estimate the contribution of

where

There exists close relation between the degree of feasibility
Problem II. How to improve the cost-efficiency of MR schedules Σ, considering the contribution of inter-robot delivery to the cost
Approach
This section presents a scheme of feasibility maintenance which consists of two algorithms, namely
The algorithm
The algorithm
To represent the dynamic manipulation of the schedules Σ by both algorithms, we define the concept of schedule manipulation operation (SMO), which is used throughout both algorithms. The set of all SMOs is denoted as
Rendezvous creation algorithm
This section presents an algorithm (Algorithm 1), as shown in Figure 1, which maintains the feasibility of the MR schedules Σ by detecting and eliminating the infeasible tasks in Σ. For each infeasible task π on robot α, it will insert tasks ahead of π that conduct rendezvouses between α and other robots with superfluous residual resources, so as to deliver these resources to α. This algorithm scans entire Σ until the resource demands of all tasks in Σ are satisfied. We base our algorithm on the concept of search frontier, which is the boundary between the satisfied and unsatisfied parts of the MR schedules and can be denoted as a function
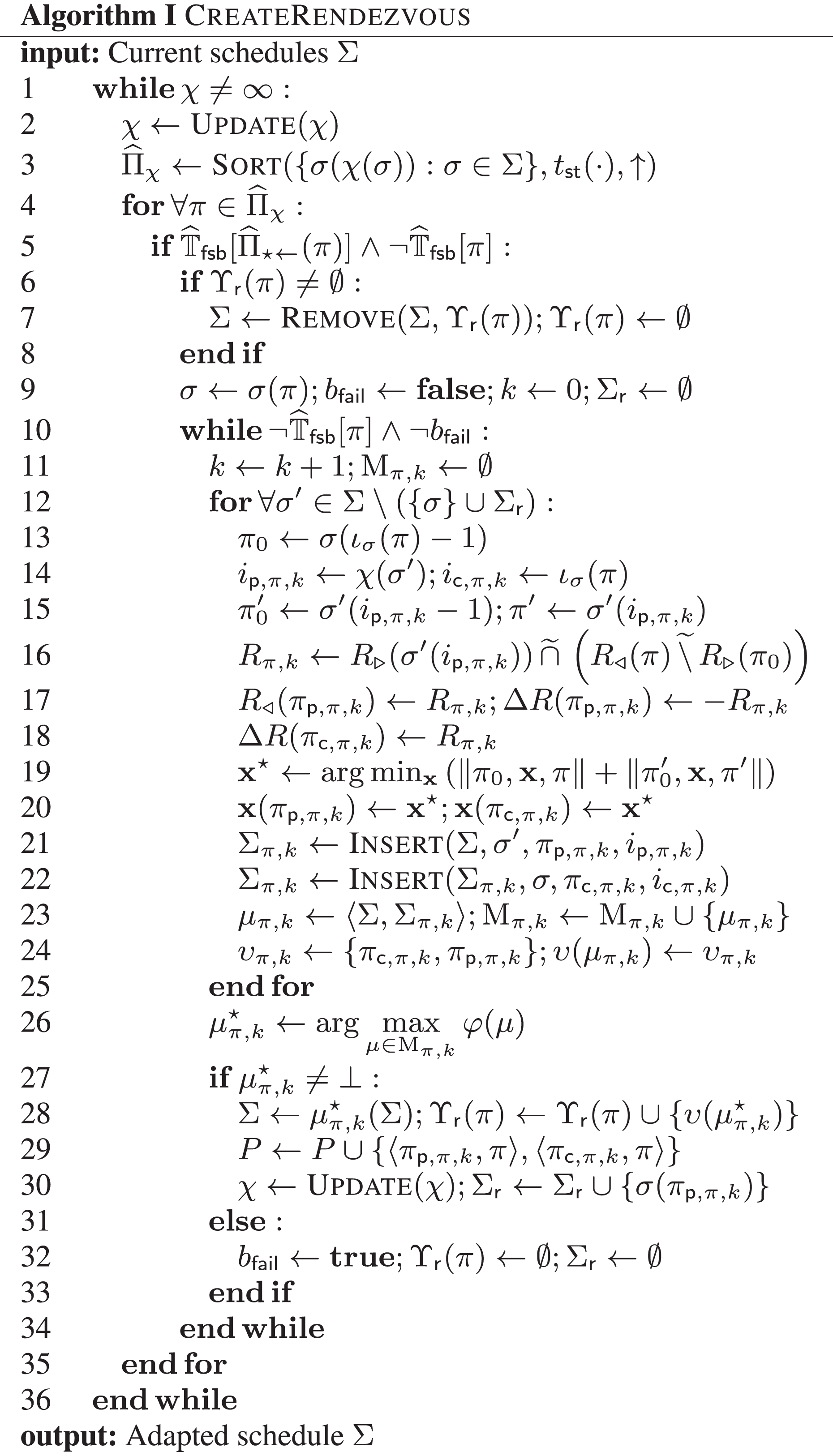
An algorithm for generating rendezvouses for inter-robot delivery to improve feasibility of the MR schedules.

That is, for any
The entire algorithm consists of a while loop which persists until

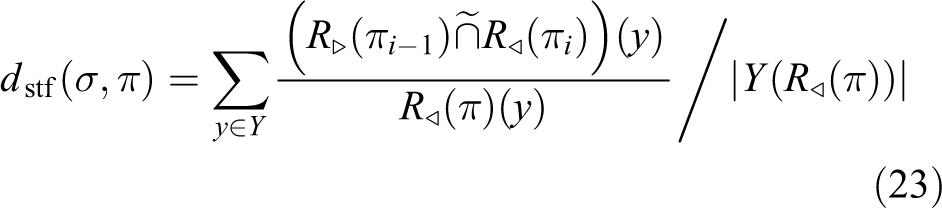
which combines
(1) The improvement (after executing μ) of the degree of satisfaction of the resource demand of task π, which is denoted as

where
where
(2) The improvement (after executing μ) of the degree of feasibility of the MR schedules Σ, which is denoted as

where
(3) The improvement (after executing μ) of the cost of the MR schedules Σ, which is denoted as

where the negative sign is used because we want the cost to be as low as possible.
The above three objectives should comply with the following constraints

After the
Figure 2 shows the structure of rendezvous set

Structure of rendezvous set
Theorem 1 guarantees that the execution of Algorithm 1 will not introduce cycles into the MR schedules, thereby ensuring the deadlock-free schedules.
Theorem 1
Deadlock-free schedules. If the MR schedules before and after Algorithm 1 are respectively Σ and
Proof
Use mathematical induction. Assume the order of tasks being processed by Algorithm 1 is
We now use reductio ad absurdum (In logic, reductio ad absurdum is a form of argument that attempts either to disprove a statement by showing it inevitably leads to a ridiculous, absurd or impractical conclusion, or to prove one by showing that if it were not true, the result would be absurd or impossible.) to prove the induction step. Given

The general cases in which the MR schedules
Case 1 (1 rendezvous is involved in the cycle)
Initially Σ is not cyclic, as shown in Figure 3 (1-1). After the set of rendezvouses
Now we show that the case 1 will lead to contradiction.
First, as shown by the condition at line 5 in Algorithm 1, the infeasible tasks in
Also, as shown by line 14 and lines 21–22 in Algorithm 1, resource-providing tasks such as
Case 2 (2 rendezvouses are involved in the cycle)
Initially Σ is not cyclic, as shown in Figure 3 (2-1). After the set of rendezvouses
Now we show that the case 2 will lead to contradiction.
Similar to case 1, since
Theorem 2 ensures that under Algorithm 1, the feasibility of every schedule
Theorem 2
Monotonic improvement of feasibility. If the MR schedules before and after Algorithm 1 are respectively Σ and
Proof
Assume the order of tasks being processed by Algorithm 1 is

The effect of inserting the set of rendezvouses
By definition, before applying

where
After applying
Case 1 (receive resource)
Schedule σ satisfies

Case 2 (provide resource)
A resource-providing task

For both Case 1 and Case 2, obviously, equation (30) holds

Case 3 (not affected)
Schedule σ is not affected by insertion of

From Case 1, 2, 3 shown above, we have equation (32)

Since for Case 1, 2, 3, inserting rendezvouses doesn’t introduce new types of resources, hence we have equation (33)

Hence, according to the definition of degree of feasibility (w.r.t. each schedule σ) given by equation (13), we have equation (34) for schedules

Hence, according to the definition of degree of feasibility (w.r.t. entire MR schedules Σ) given by equation (14), we have equation (35).

Applying equation (34) to all

Therefore
Applying equation (35) to all n steps, we get equation (37)

Therefore
Computational complexity
The accurate analysis of the complexity requires considering the influence of concrete probabilistic distribution of residual resources and resource demands. For simplicity, we only concern the worst-case complexity, when (1) all tasks are infeasible at the beginning of Algorithm 1; (2) after the resource demand of each task π in schedule σ is satisfied, the tasks succeeding π in σ still cannot be satisfied by the residual resource of σ, that is, all tasks need rendezvous to provide resources. Assume Algorithm 1 is implemented in a centralised and single-threaded manner. For each infeasible task π, in the worst case, each robot σ needs to conduct one rendezvous with every other robot in

The complexity of Algorithm 1 can be reduced by realising the algorithm in a distributed manner, so that each robot is only responsible of maintaining the feasibility of its own schedule and responding to the request from other robots to establish rendezvouses. The distributed realisation of Algorithm 1 is beyond the scope of this article and will be discussed in our future research.
Task reallocation algorithm
This section presents a greedy algorithm (Algorithm 2), as shown by Figure 5, which is periodically invoked, and is intended to maintain the cost-efficiency of the MR schedules Σ, by reallocating the allocation bundles U among Σ. Nanjanath et al. 19 have shown that the cost of Σ (especially when the locations of the tasks in the physical environment are dynamically changing) can be significantly reduced by allowing robots to repeatedly reallocate among themselves their tasks. In this article, we intend to use this algorithm as a means to (1) reduce the cost resulting from the introduction of rendezvouses for inter-robot resource delivery and (2) take any opportunity to improve the feasibility of Σ by reallocating the tasks to those robots that have sufficient residual resources to support their execution.

A greedy algorithm for reducing the cost of the MR schedules via task reallocation. MR: multi-robot.
Since each allocation bundle
In the first level (lines 1–30), for each

which is defined in the same manner as equation (21). In this case, we use


The above objectives should comply with the following constraints

which means that the optimisation step in Algorithm 2 only accepts positive improvement of the cost
In the second level (lines 5–19), for the

where


According to Theorem 3, as long as
Theorem 3
For any schedule

Proof
Prove
Prove
Also, as shown in line 10 and line 21, at both first and second levels, Algorithm 2 estimates mutual impact between Algorithm 1 and Algorithm 2 by invoking Algorithm 1, which is supposed to improve the effectiveness of both Algorithm 1 and Algorithm 2 when they are integrated. The necessity of this consideration is shown through experiment in the ‘Experiment II. Necessity of considering inter-robot resource delivery in task reallocation’ section.
Computational complexity
Assume the

Therefore, the worst-case complexity of the

When the

The complexity of Algorithm 2 can be reduced by realising both Algorithm 1 and Algorithm 2 in a distributed manner. The distributed realisation of Algorithm 1 and Algorithm 2 is beyond the scope of this article and will be discussed in our future research.
Experiments
This section uses several random experiments to demonstrate the effectiveness of our method in dealing with the problems stated in ‘Problem statement’ section. For simplicity, our experiments use a single-threaded program which centrally manages the feasibility maintenance and task reallocation of all robots and which simulates a two-dimensional environment on which the robots are able to move according to the planned speed and direction. Robots are assumed to be homogeneous, that is, each robot possesses all the necessary capabilities to perform all types of tasks. The maximum speed of each robot is set to be the same for all robots. Each robot uses
The rest of this section is organised as below. ‘Effectiveness of inter-robot resource delivery for maintaining feasibility’ section shows the effectiveness of applying Algorithm 1 (i.e.
Effectiveness of inter-robot resource delivery for maintaining feasibility
In this section, we present following two experiments which show that executing the Algorithm 1 (i.e.
Experiment I. Effect of single execution of Algorithm 1
We simulate the effect of a single execution of Algorithm 1 on the schedules Σ of a MRS consisting of three robots, corresponding to schedules


Table 2 shows the process of single execution of Algorithm 1 in terms of the effect of each inserted rendezvous (for inter-robot resource delivery) on the structure and performance indicators of Σ. Each row in Table 2 corresponds to the insertion of a resource-delivery rendezvous
Effects of single execution of Algorithm 1 on MR schedules.

MR: multi-robot.
As shown in Table 2: (1) two rendezvouses
Experiment II. Effect of persistent execution of Algorithm 1
This part of experiment is further divided into two parts: (1) instantaneous effectiveness of Algorithm 1: As shown in Figure 6, we observe the instantaneous change of the performance of the MRS over time, with given initial setting. (2) Cumulative effectiveness of Algorithm 1: As shown in Figure 7, we repeat the experiment about instantaneous effectiveness for given initial settings under different parameters and observe the influence of these parameters on the cumulative effectiveness (which is measured by the average of the instantaneous values over time) of Algorithm 1.
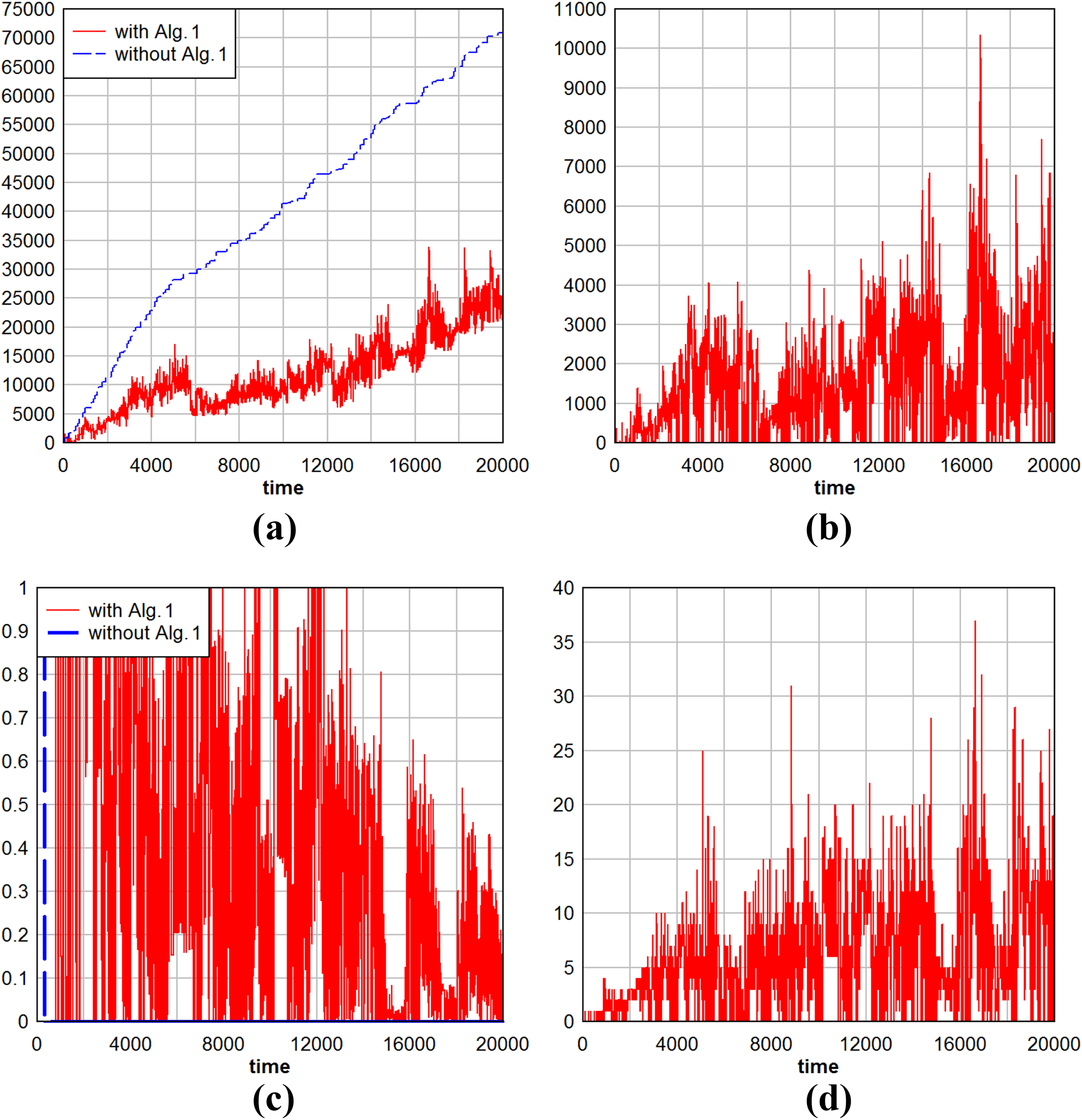
Effect of applying inter-robot resource delivery on improving the feasibility of the MR schedules; (instantaneous value, without using Algorithm 2). (a)

Effect of applying inter-robot resource delivery on improving the feasibility of the MR schedules; (time-average value, without using Algorithm 2). MR: multi-robot.
Figure 6 compares the case when Algorithm 1 is used, against the case without Algorithm 1, by showing the instantaneous values (and their change over time) under the two cases, respectively, of the following performance indicators of the MR schedules Σ: (1)
We simulate 15 robots initialised with randomly generated initial configuration, including (1) initial locations in the two-dimensional environment; (2) initial residual resources; (3) a sequence of tasks which will be assigned to the entire MRS in an extended period of time; (4) precedence constraints among the tasks. The same group of robots are simultaneously put under the two cases (with/without Algorithm 1), to evaluate the effectiveness of Algorithm 1 in improving the feasibility
As shown in Figure 6, Algorithm 1 is able to significantly improve the degree of feasibility
Figure 7 shows the distribution of the effectiveness of persistent execution of Algorithm 1 when following parameters are considered. (1)

where (1) fsb (or
As shown in Figure 7, both
Summary
This section validates the capability of
Effect of persistent task reallocation on inter-robot resource delivery
This section uses several random experiments to show the effectiveness of Algorithm 2 (i.e.
Experiment I. Effect of task reallocation (applied alone) on MR schedules
We first present an experiment which demonstrates the effect of Algorithm 2 (i.e.

Effect of applying persistent task reallocation on performance indicators of Σ; (instantaneous value, using Algorithm 2 alone). (a)
Experiment II. Necessity of considering inter-robot resource delivery in task reallocation
We now use an experiment to show that to successfully integrate Algorithm 2 with Algorithm 1, it is necessary for Algorithm 2 to explicitly anticipate the influence of each reinsertion operation

Effect of applying persistent task reallocation on performance indicators of Σ; (instantaneous value, Algorithm 2 doesn’t consider
Effect of applying persistent task reallocation on performance indicators of Σ; (instantaneous value, Algorithm 2 considers
As shown in Figure 7, when Algorithm 2 doesn’t consider
As shown in Figure 10, after Algorithm 2 explicitly considers
Experiment III. Integrating task reallocation (Algorithm 2) with rendezvous generation (Algorithm 1)
Figure 10 only shows the effectiveness of Algorithm 2 in one particular setting of parameters. In this section, we present an experiment to evaluate the effectiveness of Algorithm 2 under a wider range of settings, when Algorithm 2 explicitly considers

Effect of applying persistent task reallocation on the effectiveness of inter-robot delivery; (time-average value, Algorithm 2 considers

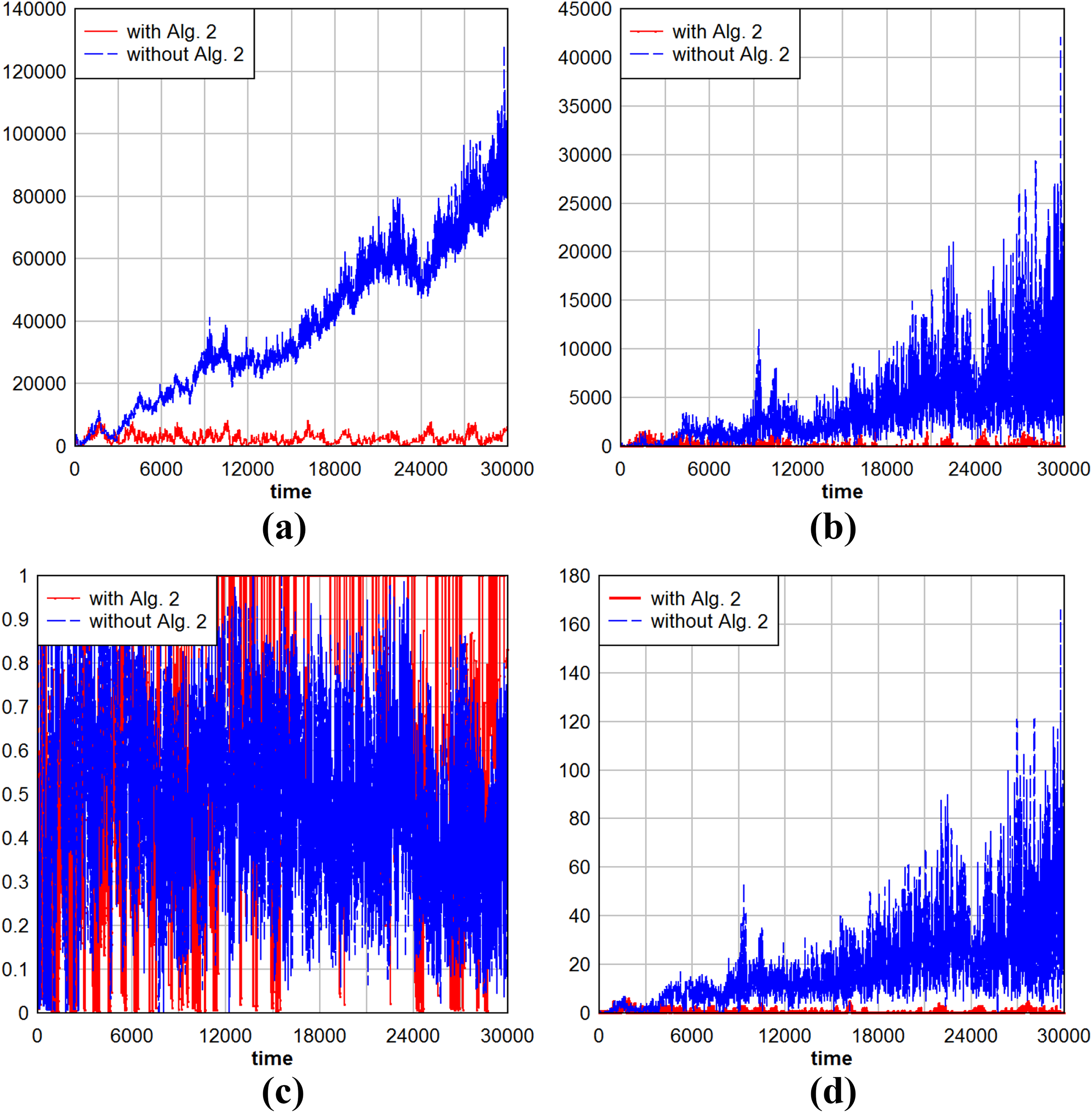
Effect of inter-robot resource delivery on performance indicators of Σ; (instantaneous value, using both Algorithm 1 and Algorithm 2). (a)


where alc (or
As shown in Figure 11, the time-average of all the performance indicators are improved to certain extent by integrating Algorithm 2 with Algorithm 1. Compared to other performance indicators, the improvement to
Summary
This section validates the capability of Algorithm 2 (i.e.
Effectiveness of inter-robot resource delivery in scenarios with fixed resource stations
This section presents an experiment which shows the effectiveness of inter-robot delivery in maintaining the feasibility of MR schedules in an environment with fixed resource stations. We assume that the environment can be divided into two separate regions: (1) task region, which holds the working locations of all the tasks assigned to the MRS; (2) station region, which holds the locations of all the fixed stations which can provide resources to the MRS. It is assumed that all robots do not possess any initial residual resources and must fetch resources from the fixed stations. In addition to the previously introduced parameter
This experiment is further divided into three parts: (1) instantaneous effectiveness of Algorithms 1 and 2: As shown in Figure 6, we observe the instantaneous change of the performance of the MRS over time, with given initial setting. (2) Cumulative effectiveness of Algorithm 1 and Algorithm 2 considering
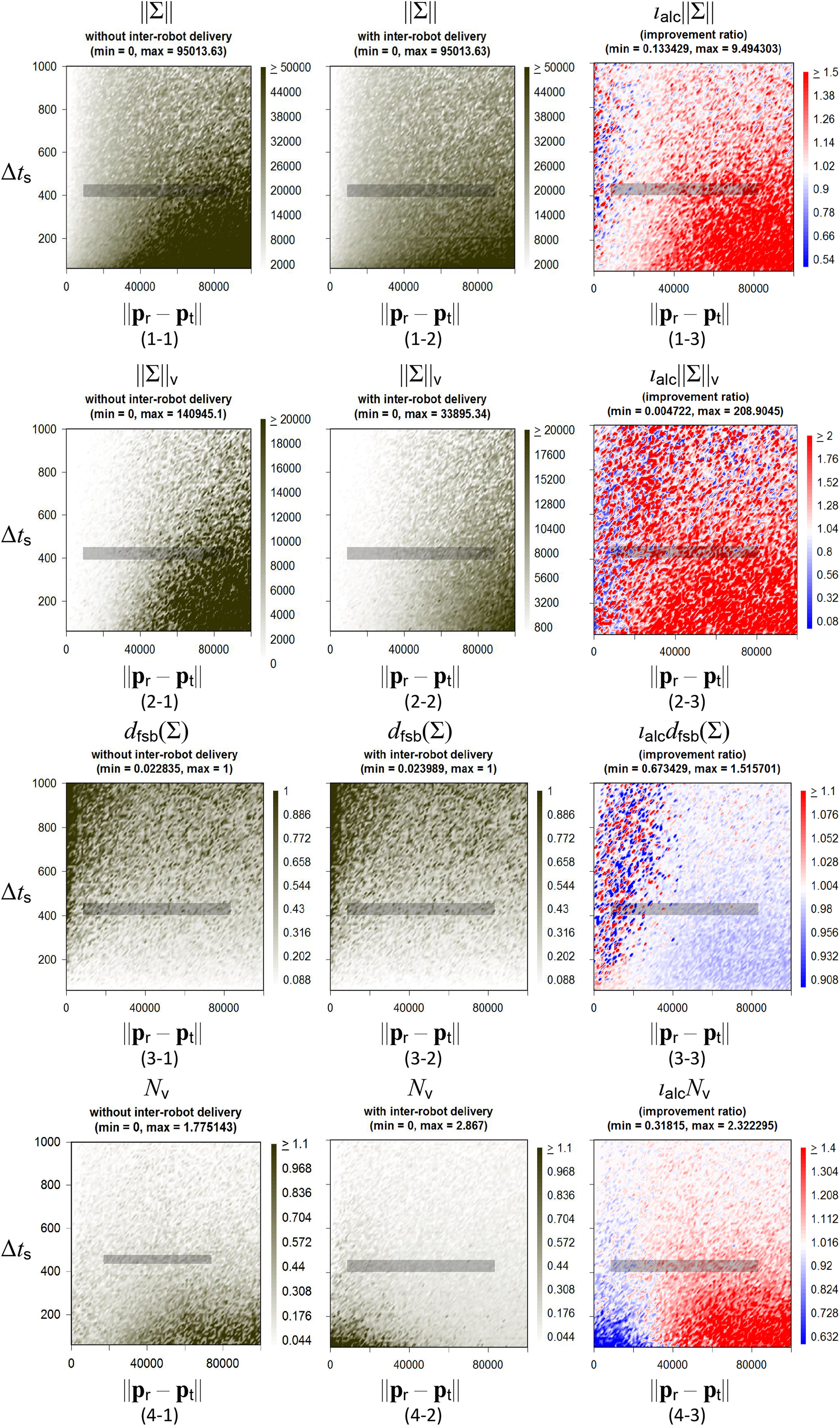
Effect of inter-robot resource delivery on the performance indicators of Σ under the scenario with fixed resource station, considering influence of

Effect of inter-robot resource delivery on the performance indicators of Σ under the scenario with fixed resource station, considering influence of
Figure 12 shows the effect of inter-robot delivery in reducing cost when fixed stations are distant from task locations. We set
Figure 13 shows the distribution of the effectiveness of entire approach when the parameters


where ird (or
As shown by Figure 13 (1, 2-3), the inter-robot delivery is capable of improve
Figure 14 shows the distribution of the effectiveness of the approach when parameters
Summary
This experiment shows the effectiveness of allowing inter-robot delivery in reducing the cost
Conclusion and future work
We propose a method for dynamically acquiring resources for MR schedules with inter-schedule dependencies and limited resources. We present an algorithm (Algorithm 1) that generates rendezvouses for delivering resources among robots, to persistently maintain the feasibility of the schedules. Algorithm 1 ensures that the feasibility of robots are improved monotonically, and that the rendezvouses for inter-robot delivery will not cause deadlocks among schedules. We present an algorithm (Algorithm 2) that reallocates the tasks among schedules to reduce the cost of schedules, considering the influence of inter-robot delivery. Our experiment shows effectiveness and limitations of the following aspects of our research: (1) Algorithm 1, for persistently and monotonically improving the degree of feasibility of schedules, without introducing deadlocks among schedules; (2) Algorithm 2, for persistently improving the cost-efficiency of the schedules, and the synergy of integrating Algorithm 2 with Algorithm 1; (3) inter-robot delivery, for improving the degree of feasibility and cost-efficiency of the schedules in such scenarios when fixed stations are distant from the locations of tasks.
The contribution of our research to MRTA domain is summarised as below: (1) we present a novel method of feasibility maintenance that uses inter-robot delivery to relieve the shortage of resources, which is apt for the cases when fixed resource stations are unavailable, depleted or distant from the task locations. (2) We consider two types of constraints among tasks, namely precedence constraints and rendezvous, which are useful in many real-world scenarios, investigate their influence on the inter-robot delivery and ensure the compliance with these constraints and prevent deadlocks. (3) We investigate the interplay between (i) feasibility maintenance based on inter-robot delivery and (ii) cost-efficiency maintenance based on task reallocation and enable Algorithm 2 to anticipate the influence of inter-robot delivery on cost-efficiency to relieve the conflict between feasibility and cost-efficiency.
With regard to the presented algorithms, we plan to reduce their computational complexity via parallelism. In addition, we plan to tackle following challenges: (1) the complex dynamics related to the consumption and production of resources during task execution and the interdependencies among different types of resources; (2) the influence of stochastic spatial distribution of tasks, resource demands and supplies, and resource stations in the environment on the effectiveness of inter-robot delivery; (3) considering the urgency of the tasks, so that the resource demands of more urgent tasks can be satisfied with higher priority, even at the expense of less urgent tasks.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Natural Science Foundation of China under Grant Nos. 61532004 and 61379051.