
Abstract
Considering the joint elasticity, a novel dynamic parameter identification method is proposed for general industrial robots only with motor encoders. Firstly, the unknown parameters of the elastic joint dynamic model are analyzed and divided into two types. The first type is the motion-independent parameter only including the joint stiffness, which can be identified by the static force/torque-deformation experiments without the dynamic model. The second type is the motion-dependent parameter composed of the rest of the parameters, which needs the dynamic excitation experiments. Therefore, these two types of parameters can be identified separately. Meanwhile, it is found that the rotor inertia parameters can be obtained from the manufacturer, which reduces the identification difficulty of other parameters. After obtaining the rotor inertia and joint stiffness, an approximate processing algorithm is proposed considering the motor friction to establish the linear identification model of other parameters. Hence, the least squares can be employed to identify the parameters, and the independence of the inertia and joint viscous friction parameters are not affected. Meanwhile, the exciting trajectories can be optimized throughout the robot workspace, which reduces the effect of measurement noise on identification accuracy. With the proposed separated identification strategy and approximate processing algorithm, the dynamic parameters can be obtained precisely without double encoders on each joint. Finally, a series of simulations are conducted to evaluate the good performance of the proposed method.
Keywords
Introduction
With the increasing applications of industrial robots in modern manufacturing field, a lot of advanced motion control methods based on the torque input have been proposed and applied to satisfy the demand for high speed and high accuracy, which requires the complete and accurate dynamic model of robot. 1 –4 Meanwhile, the dynamic model is the basis for the characteristic analysis of robot. 5 However, the parameters of dynamic model are usually not provided from the robot manufacturer. In addition, the parameters obtained from the computer-aided design (CAD) model are not accurate due to the manufacturing and assembly error. Therefore, it is critical to develop a rational and practical parameter identification method for industrial robots.
The rigid body dynamic model (RBDM) is wildly used to describe the robot. And a lot of parameter identification methods for RBDM have been proposed. One of the methods most used is the Inverse Dynamic Identification Model + Least Squares (LS) (IDIM + LS) scheme. 6 –11 An inverse dynamic model that is linear with respect to the dynamic parameters is established. Then, the excitation trajectory is designed with various methods. 6,9 The robot input and output signals are sampled during the dynamic excitation experiment. Finally, the parameters are estimated by the LS. Based on this idea, the Direct Inverse Dynamic Identification Model (DIDIM) method 12,13 is developed without calculating the velocity and acceleration through the band pass filter of the position. In addition, the extended Kalman filter and weighted LS 14,15 are employed to the parameter identification. However, the extended Kalman filter is very sensitive to initial conditions, and its convergence velocity is slower. Another alternative identification method is the maximum-likelihood estimation. 16 Nevertheless, it should only be considered in cases where both measurements, position and torque, are noisy. 17 In summary, the IDIM + LS method is still a good choice to identify the parameters of RBDM. 11
For the parameter identification of RBDM by these methods, the motor encoders were used to sample the angle as the joint positions. However, the robot is an elastomer, and the elasticity is mainly concentrated on the joints due to reducers and other transmission components. Hence, the neglect of joint elasticity can cause large errors to identification. To cope with this problem, the elastic joint dynamic models (EJDM) of robots are established, and some identification methods have been proposed. Zollo et al. 18 established the dynamic model based on the Lagrangian formulation where the torque vector is expressed as the product of a regressor matrix and defined by the vector of dynamic parameters. The LS method is also employed. Miranda-Colorado 19 built the filtered model and used the LS with forgetting factor (LSFF) to identify the parameters. Gautier et al. 20 extended the DIDIM method to the identification of flexible system. However, these methods are only suitable for the specially designed robots with double encoders on each joint, where both the motor and joint positions can be measured directly. For general industrial robots, only the motor encoders are designed and mounted. Hence, these methods have low practicality for industrial application.
To realize the parameter identification of the general robots only with motor encoders and elastic joints, Gautier et al. 21 proposed a joint stiffness identification method. Because of the unknown rotor inertia, joint stiffness, and motor friction parameters, the linear IDIM is difficult to establish. Hence, the experiments were conducted in a small range to reducing the influence of nonlinearity on linear regression identification. However, the identification accuracy is sensitive to measurement noise because the exciting trajectories cannot be optimized. Meanwhile, the base parameter set was reconstructed where the joint stiffness and motion friction parameters were coupled with the inertia and joint friction parameters.
To cope with these problems, a novel dynamic parameter identification method considering the joint elasticity is proposed for general industrial robots. Firstly, the characteristics of the unknown parameters are analyzed and divided into two types called motion-dependent and motion-independent parameters. For the motion-independent parameters, which only includes the joint stiffness, the static force/torque-deformation experiments are sufficient to identify them without the dynamic model. For the motion-dependent parameters composed of the rest of the parameters, the dynamic excitation experiments are needed. Therefore, these two types of parameters can be identified separately. Meanwhile, it is found that the rotor inertia parameters can be obtained from the manufacturer, which reduces the identification difficulty of other parameters. After obtaining the rotor inertia and joint stiffness, an approximate processing algorithm is proposed considering the effect of motor friction parameters to establish the linear minimal identification model. Hence, the LS still can be employed and the independence of inertia and joint viscous friction parameters are not affected. Meanwhile, similar to the rigid body situation, the exciting trajectories can be optimized throughout the robot workspace, which can reduce the influence of measurement noise. With the proposed separated identification strategy and approximate processing algorithm, the dynamic parameters can be obtained precisely without double encoders on each joint. Finally, a series of simulations are conducted to evaluate good performance in accuracy of the proposed method.
The remainder of this article is organized as follows. In the second section, the EJDM of robot is established. Third section describes the proposed parameter identification method. The identification results are illustrated and compared with previous works in fourth section. And, the conclusions are given in fifth section.
Modeling
Dynamic model of robot with elastic joint
As shown in Figure 1, the elastic joint is always modeled as a linear torsional spring with stiffness K and reduction gear ratio R. Meanwhile, since the stiffness of link is much larger than joint, 22 the link is assumed as rigid body. Therefore, the EJDM of an n-degree-of-freedom (n-DOF) robot can be established as follows based on Newton–Euler or Lagrange formulations



with







where

Elastic joint model.
There are several typical models to describe the friction characteristics of joint and motor including the Coulomb, Coulomb + viscous and Stribeck models. 23,24 For the joint friction, Coulomb + viscous model is widely used both in rigid body and in flexible dynamic models. Therefore, the Coulomb + viscous model is also employed in this article as follows



where
For the motor friction, the viscous friction torque is small and the Coulomb friction always plays a major role. 25 Meanwhile, to simplify the parameter identification process of EJDM, the Coulomb model is used in this article as follows


where
For ith link, there are 10 unknown inertia parameters which need to be identified as follows

where

Considering the joint elasticity, another three parameters including the joint stiffness

Problem of the minimal identification model for EJDM
Owing to the linear relation between the parameter

where
However, it is difficult to establish the linear minimal identification model for EJDM. For general industrial robots, each joint has only one encoder which is usually mounted on the motor. Hence, only the motor motion parameters




By substituting equations (14) to (16) into equation (1), the linear minimal identification model cannot be obtained due to the nonlinear relation between
Parameter identification method for EJDM
In this section, the proposed parameter identification method is described in detail. The characteristics of the unknown parameters in
Characteristic analysis of the unknown parameters
As described in “Problem of the minimal identification model for EJDM” subsection, it is difficult to identify the unknown parameters through IDIM + LS method although the data sampled during the motion process contain all the information of these parameters. Actually, the motion and sampling process are not necessarily essential for the identification of each parameter. As shown in equation (11), the 15 unknown parameters of ith DOF can be divided into two types as follows: (1) Motion-dependent parameters
This type of parameters consists of
(2) Motion-independent parameters
This type of parameters only includes
It should be noted that
Based on the analysis results, these two types of dynamic parameters can be identified separately, which is given in the following subsections.
Identification of the motion-independent parameters
The static force/torque-deformation experiments and identification are wildly used to obtain the joint stiffness of industrial robots, 26 –28 which can be described briefly as follows. During the static experiments, the determined force/torque is applied to the robot links or end effector. Meanwhile, the displacement sensors can measure the steady state deformation of the end effector. Hence, the Cartesian stiffness of robot can be calculated. Then, the analytical relation between the joint and Cartesian stiffness can be established based on the kinematic model of robot. Finally, many kinds of identification methods such as the LS and genetic algorithms can be employed to obtain the joint stiffness. As can be seen, the robot dynamic model is not used, which also indicates that there is no need to identify the joint stiffness through dynamic excitation experiments with other parameters.
Using these static force/torque-deformation experiments and identification methods, various external displacement sensors such as the machine vision, grating, and laser sensors can be employed to measure the deformation of the end effector. Therefore, the double encoders of each joint, which is not designed and mounted on general industrial robots, are not required. In addition, the identified joint stiffness has higher accuracy owing to the static experiments and the measured data in steady state.
Identification of the motion-dependent parameters
Based on subsections “Characteristic analysis of the unknown parameters” and “Identification of the motion-independent parameters”,
Equation (14) can be rewritten as follows

For general industrial robots, the order of magnitude of reduction gear ratio Ri
is 102, which is much smaller than the joint stiffness.
26,27,29
Meanwhile, the Coulomb coefficient

As can be seen from equations (14) and (15),

Different from

Through shifting the motor friction part, equation (20) can be rewritten as follows

As shown in equation (21), the left part is the linear expression of the unknown parameters

In summary, the procedures of the proposed parameter identification method can be illustrated in Figure 2. As can be seen, the parameters of joint stiffness and rotor inertia can be obtained independently without double encoders on each joint, which is essential for the general industrial robots. Meanwhile, the proposed approximate identification model does not affect the independence of inertia and joint viscous parameters in
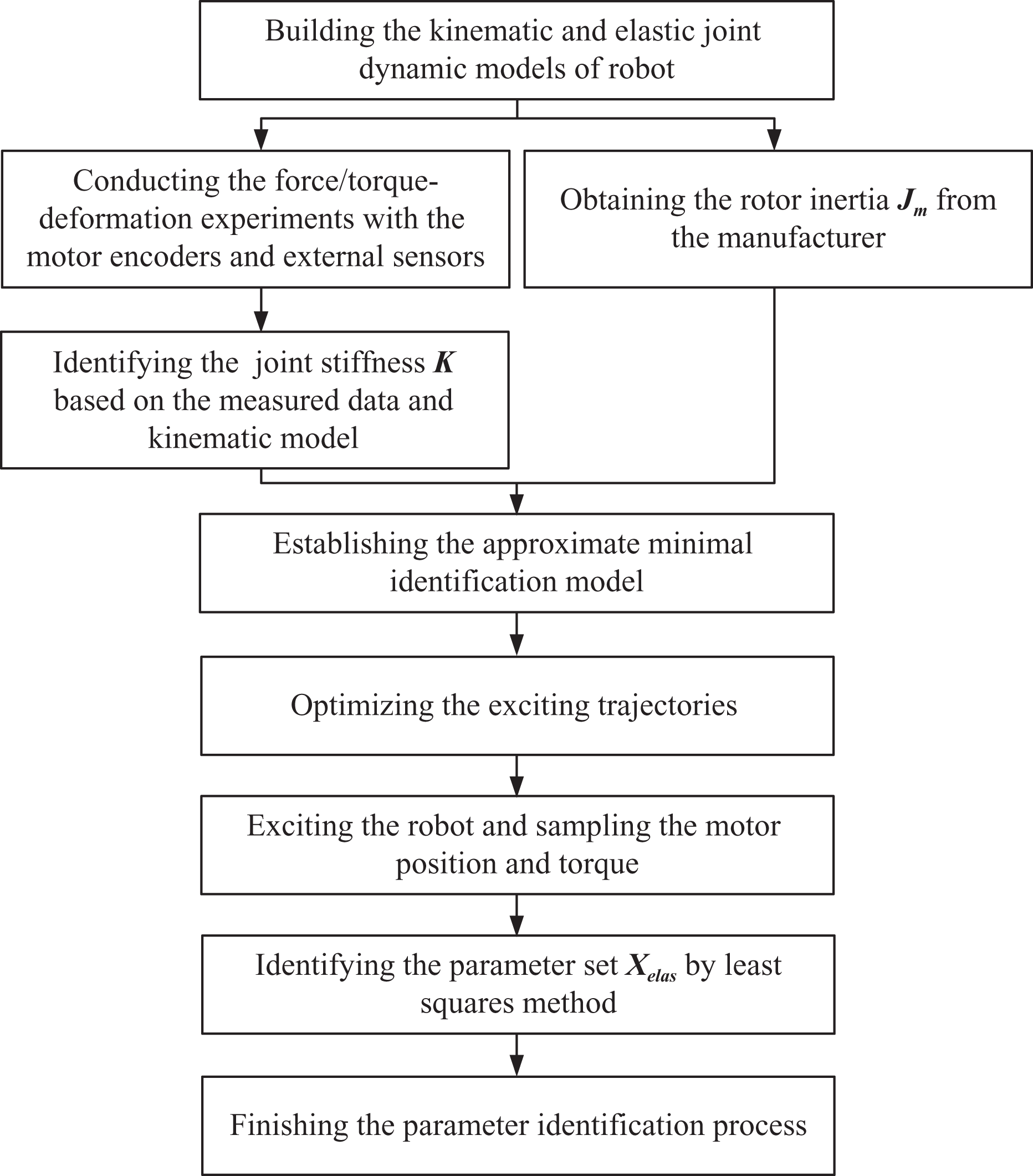
The procedures of the proposed parameter identification method.
Results and validation
In this section, simulation tests are conducted to evaluate the good performance of the proposed dynamic parameter identification method for the EJDM. Analysis and comparisons are also performed with the traditional IDIM + LS method without considering joint elasticity.
Test case
Figure 3 shows a typical 6-DOF industrial robot, and its modified Denavit–Hartenberg (D-H) parameters are illustrated in Table 1. Since the inertia and friction are mainly concentrated on the first three links and joints, the first three DOFs are selected as the case studies. By locking the last three joints under the gesture shown in Figure 3, they become part of the third link. Hence, the base parameter set

Model of typical 6-DOF industrial robot. DOF: degree of freedom.
The modified D-H parameters of 6-DOF industrial robot.

D-H: Denavit–Hartenberg; DOF: degree of freedom.
Definition of the base parameter set.

Real values of the joint stiffness and rotor inertia.

The Fourier serious equation 31 is utilized to generate the exciting trajectories in joint space. The minimum condition number principle 32 is employed to optimize the coefficients of the finite sum of sine and cosine functions, which can obtain the trajectories throughout the workspace and reduce the effect of measurement noise. The fmincon function in Matlab [version 2018b] is used to conduct the optimization. Therefore, the fifth-order Fourier series equation, which is shown in Appendix 1, is employed to describe each joint position. Correspondingly, the trajectory of each motor can be obtained according to equations (1) and (2) and is shown in Figure 4. During the simulations, the motor angular positions are sampled at 2 kHz with high-resolution encoders (8,388,608 counts/round). The sampled data are filtered through a low-pass Butterworth filter. To consider the effect of measurement noise on identification accuracy, the Gaussian noise with zero mean value is added to the motor motion parameters and torque with different levels of signal-to-noise ratio.

Exciting trajectory of each motor.
Identification results and comparisons
By neglecting the measurement noise, the torque data of each motor are sampled and shown in Figure 5. For the joint stiffness and rotor inertia, they can be obtained by static experiments and motor manufacturer precisely. Therefore, we assume that they have 1% and 0.5% error, respectively. The identification results of

Sampled torque of each motor.
Identification results by the two methods without measurement noise.

IDIM: inverse dynamic identification model; LS: least squares.
The direct validation is also conducted where the torque of each motor is estimated based on the identified parameters given in Table 4. As shown in Figure 6, the estimated torque by the proposed method is closer to the measured one, which indicates its higher accuracy.

Measured and estimated torque of each motor by the proposed method and the traditional IDIM + LS method. IDIM: inverse dynamic identification model; LS: least squares.
The identification results by the two methods with different levels of signal-noise-ratio (i.e. SN = 30, SN = 50, SN = 80) are shown in Tables 5 and 6, respectively. As can be seen, the measurement noise has a certain influence on the accuracy of the proposed method. But with the increase of signal-noise-ratio, the identification accuracy is improved obviously. The error with SN = 50 is small, and the accuracy with SN = 80 is close to the absence of measurement noise. However, there is no obvious change in accuracy of the traditional IDIM + LS method with different levels of signal-noise-ratio because the neglect of joint elasticity is the key factor to cause error.
Identification results by the proposed method with measurement noise.
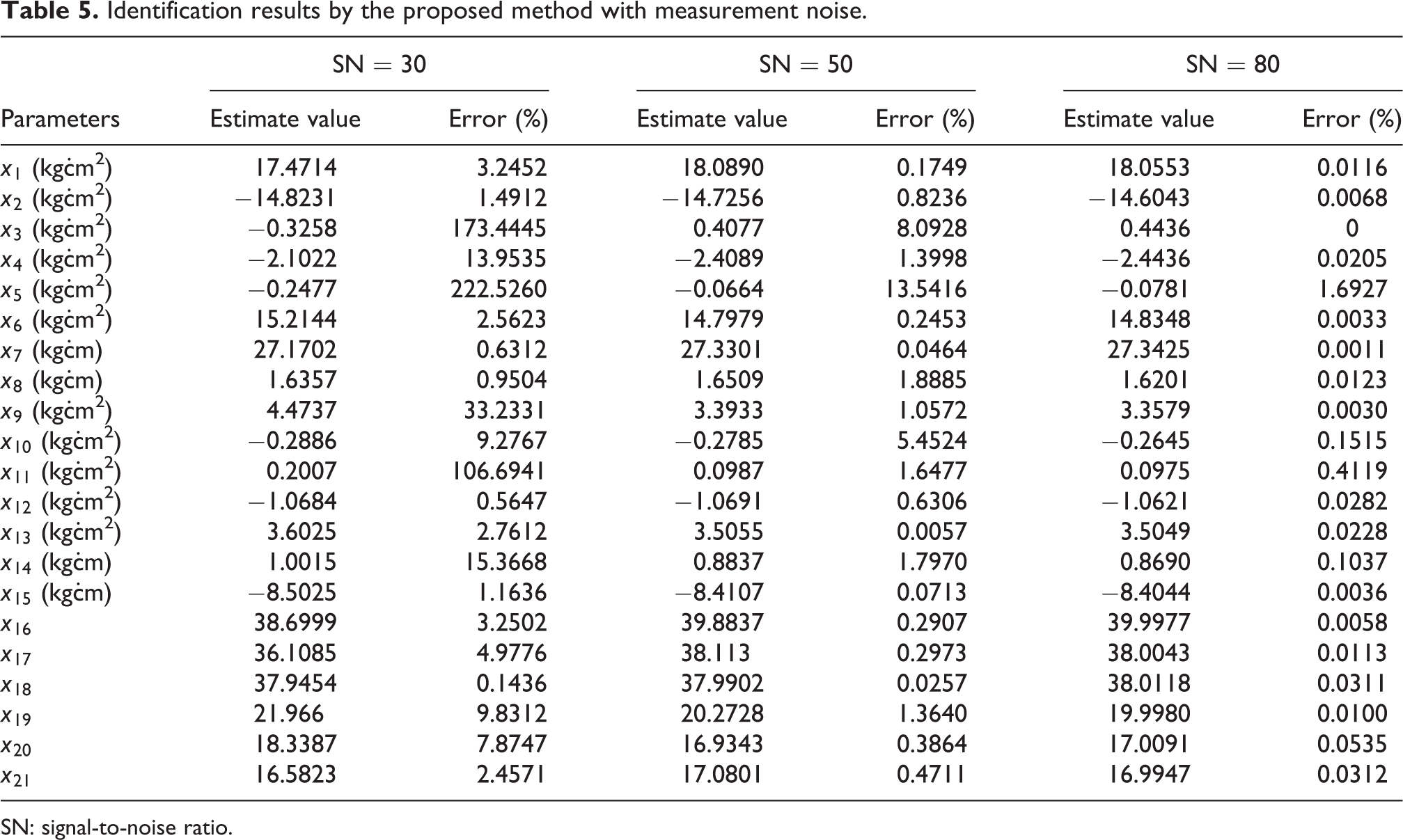
SN: signal-to-noise ratio.
Identification results by the traditional IDIM + LS method with measurement noise.
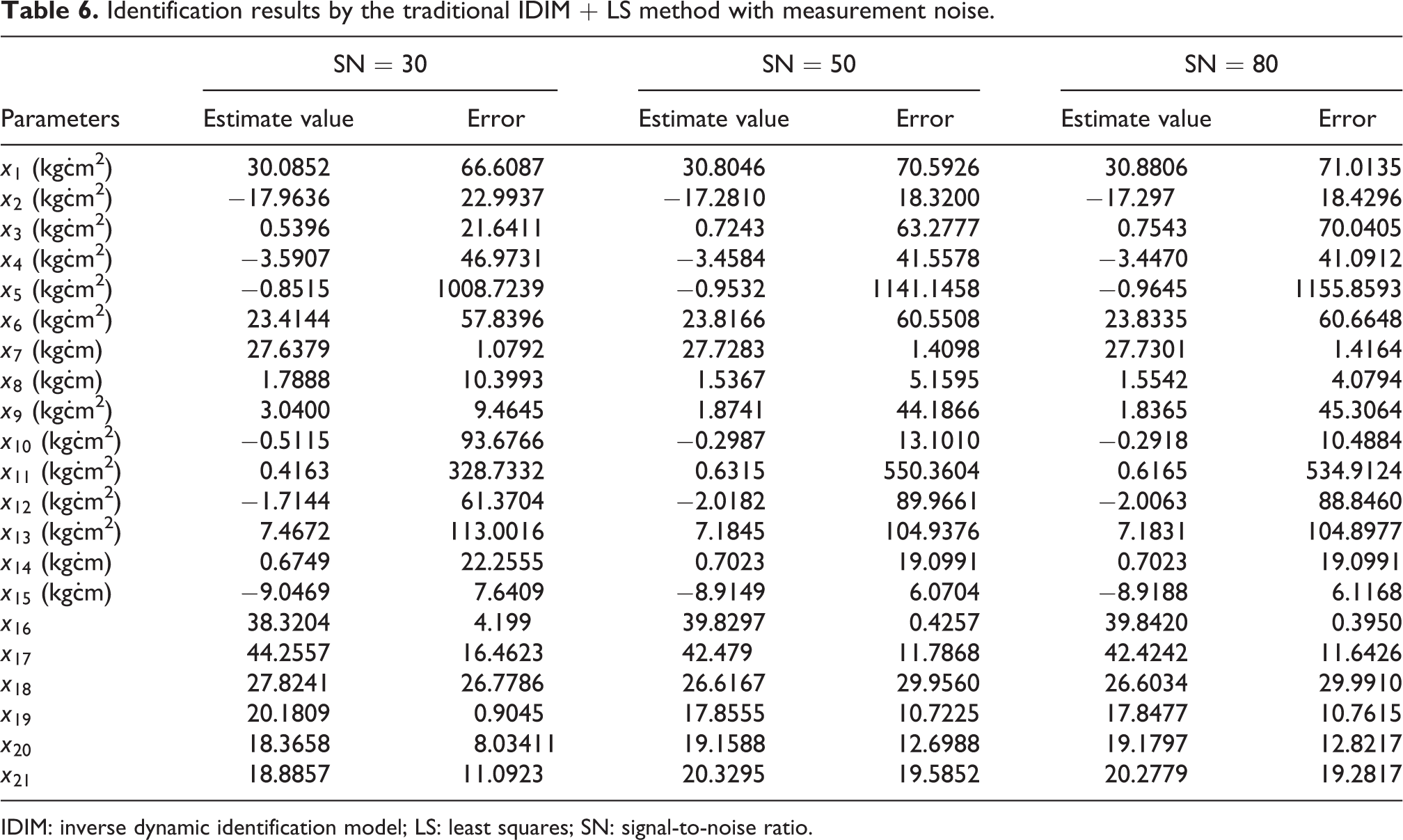
IDIM: inverse dynamic identification model; LS: least squares; SN: signal-to-noise ratio.
Conclusion and future works
In this article, a novel dynamic parameter identification method is proposed for general industrial robots only with motor encoders and elastic joints. The main conclusions of the study are as follows: The unknown parameters of the EJDM are analyzed and divided into two types and named motion-dependent and motion-independent parameters that can be identified separately. The joint stiffness, which belongs to the motion-independent parameter, can be identified precisely based on the static force/torque-deformation experiments and kinematic model of robot. In addition, the rotor inertia can be obtained from the motor manufacturer without identification. To identify the motion-dependent parameters, an approximate processing algorithm is proposed to establish the linear identification model, which can employ the LS. Hence, the independence of the inertia and joint viscous friction parameters are not affected and the exciting trajectories can be optimized to reduce the effect of measurement noise. With the proposed separated identification strategy and approximate processing algorithm, the parameters of general industrial robots can be identified without double encoders on each joint. A series of simulations are performed with previous works to validate the good performance in accuracy of the proposed method.
Future works will take the motor viscous friction parameters into consideration. Other methods will be developed and used to establish the linear minimal identification model with higher accuracy.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work is supported by Special Foundation for National Integrated Standardization and New Model of Intelligent Manufacturing, China (grant no. Z135060009002-132) and National Natural Science Foundation of China (grant no. 51875323).
Appendix 1
After the optimization based on the minimum condition number principle and Fmincon function in Matlab, the formulation of each joint position is shown in equation (A1) and the corresponding coefficients are illustrated in Table A1.
where