
Abstract
When a space flexible robot captures a floating target, the manipulator vibration and the impact reacting onto the base attitude are the key issues which may cause critical safety problems. In this investigation, the attitude reactionless control and the vibration suppression are considered in the meantime to reduce the risk in grasping operation. The dynamic models of the space flexible robot and the target are established, and then the Dynamic Grasping Area is introduced to describe the contact procedure of the capture device grasping target. Even though the flexible vibration of the manipulator can be easily suppressed by using the conventional joint active damping control, the reaction impact to the base attitude is serious and unacceptable. The simulation results indicate that, by using the optimal control for the vibration suppression in the attitude reaction null space, the vibration of the manipulator could be alleviated significantly and the base attitude is also almost undisturbed in the meantime during the whole grasping procedure.
Keywords
Introduction
With the development of space exploration and application, the space robot plays an increasingly important role. As a typical space multibody chain system, space manipulator has some special properties, such as light weight, large structure size, and payload mass, which cause the flexible problem dominantly. Especially, in the process of grasping target, the contact between the manipulator terminal grasping device and the target will stimulate the flexible arm vibration and cause substantial disturbance to the base attitude due to the momentum conservation in space.
In the actual grasping process, the capture device configuration and the changes of grasping area have a direct impact on the collision excitation. The flexible manipulator vibration and the impulse to the base attitude are critical to the grasping safety and the performance. When the base suffers from reaction impulse, it may have controller saturation, and even jet-consuming, which will reduce the on-orbit lifetime. The disturbance to the base attitude may also impact the pointing accuracy of the other components or cause the resonance of the other flexible attachments. Therefore, it is crucial to suppress the vibration and reduce the impulse to the base attitude in the meantime during grasping procedure.
Space manipulator grasping target has been researched for a long time due to its aerospace application. Cyril et al. 1 and Yoshida et al. 2 analyzed the collision dynamics and kinematics model of manipulator grasping target; Dimitrov 3 discussed the momentum exchange and transfer between space robot and target; Huang et al. 4,5 established the mapping relation between the impact force and its impact on each joint, then applied double arms cooperative control on grasping space target to eliminate the impact of impulse on the base. But the aforementioned researchers only studied the momentary impact of space robot grasping target, and not actually described the collision excitation between the capture device and the target in the process of grasping, or its impact on the manipulator flexible vibration.
Research on flexible manipulator dynamics and control has been more mature. Dwivedy and Eberhard 6 reviewed on flexible manipulator modeling and analysis methods, experiment and control in detail; Tokhi and Azad 7 analyzed the space flexible manipulator on-ground verification and space operation, and studied the input shaping control, enhanced classic proportional integral differential control and other control methods applied on the flexible manipulator. In recent years, researches on the flexible manipulator mainly focus on nonlinear dynamics, 8 model experimental verification 9 and providing more accurate and useful dynamic models to the control system, 10,11 while the space flexible manipulator grasping control is rarely seen in literatures.
Researchers also have an in-depth research on the base attitude undisturbed control when the space robot suffers the external impulse. Vafa and Dubowsky 12,13 proposed a virtual manipulator modeling theory and analyzed its application on reducing the disturbance of the manipulator to the base; to achieve little disturbance to the base during the movement of the manipulator, Nenchev et al. 14 proposed the concept of reaction null space and designed the hybrid controller; Chung 15,16 analyzed the global routing planning with little disturbance to the base by the redundancy characteristics of redundant manipulator. Rybus et al. 17 proposed a nonlinear model predictive control for free-floating space manipulator which could get more accurate base attitude control performance, Nguyen-Huynh and Sharf 18 used adaptive reactionless motion control for the post capture of space debris, Dubanchet 19 modeled the flexible space robot and simulate the capture operation for a tumbling debris; but they did not propose any control for minimizing both of the disturbance to the base and the flexible manipulator vibration in the meantime during the grasping progress. Božek described the system activity and the importance of autonomous inertial navigation system and its implementation to control the robotic arm for better performance, 20 and Turygin et al. integrated the inertial navigation unit implemented into the system of controlling the robot to get more accurate measure result. 21
The attitude undisturbed control is mainly applied on the routing planning. However, the collision impulse which the flexible manipulator suffers in the process of grasping will cause larger flexible vibration and disturbance on the base attitude, so the attitude undisturbed control is not enough for the space large flexible manipulator. 22 Flexible vibration suppression combining with attitude undisturbed control would enhance the on-orbital operation safety and stability.
In this article, the dynamic models of the space flexible robot and the target are established in the second section, and then the Dynamic Grasping Area is introduced to describe the contact procedure of the capture device grasping target. In the third section, the joint active damping control (ADC) is applied to alleviate the flexible vibration of the manipulator, furthermore, to reduce the disturbance of base attitude in the meantime, the optimal control for the vibration suppression in the attitude reaction null space is used which can efficiently reduce the impact influence to the whole system during the grasping procedure. The simulation is given in the fourth section which shows the effectiveness of the proposed control method.
Dynamic and kinematic modeling
Modeling assumption
Assumptions in the manipulator capture and control models are as follows: (1) The space manipulator vibrates slightly, and the assumed modal method is applied for the flexibility; (2) attitude and orbit controls are not applied on the base; (3) only single point of collision exists between the capture device and the target, and the friction influence is neglected in collision; (4) the joints are driven by torque motors, and the nonlinear characteristics of the joints, such as clearance, flexibility, and so on, are neglected; (5) the attitude of the target is controlled and the position is free (Figure 1).

Space robot grasping satellite.
According to the assumptions above, the dynamic systems and coordinate systems can be defined as follows: inertial coordinate system ΣI, the base coordinate system ΣB with its origin at the center of mass of the base, the end coordinate system ΣE, the target coordinate system ΣT, the ith joint coordinate system origin Oi
, the ith link center of mass position vector under the base coordinate system

Dynamic model of space robot and target.
Denote Oxyzi as the body coordinate system of the ith joint and



Parameters of flexible manipulator.
Dynamic modeling of space robot and the floating object
Based on the assumed modal method, the dynamic model 3 of space flexible robot is established using Lagrange equation which is as follows
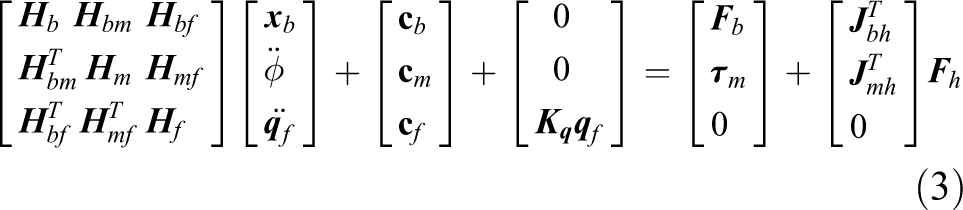
where
According to the assumption, the dynamic model of the space floating target is established as follows


where mt
is the mass of the floating target;
Dynamic grasping collision modeling
In the process of manipulator grasping the target, the terminal grasping device will contact and collide with the target several times to achieve the final balance for the manipulator flexibility and measurement error and other factors (Figure 4). Therefore, the manipulator terminal grasping device is abstracted to the Dynamic Grasping Area, 23 to investigate the grasping collision process (Figure 5).

Grasping procedure of space robot. (a) Ready to grasp. (b) Grasping procedure. (c) Finish grasping.

Contact model in grasping.
The Dynamic Grasping Area is defined as the smallest inscribe space Ω surrounded by the terminal grasping device, a circle with the radius of Rdga. The Dynamic Grasping Area constricts in the grasping process and its edge contacts and collides with the target handle constantly, until the Dynamic Grasping Area reduces to zero, the grasp finishes.
The impact force resulted from the contact between the grasping area edge and the target handle is along the common normal line direction at the contact point, where the local distortion occurs, depicted as the mutual invasion δ. When δ < 0, the collision occurs, then the Spring–Damper contact model is introduced to compute the impact force. Energy consumption which exists in the contact process is regarded as the dissipation by damping materials. The impact force Fc based on the elastic theory is obtained as follows

where Kc is the stiffness coefficient of the contact collision and Cc is the damping coefficient of the contact collision.
According to the impact model in the grasping operation, the relationship between the external forces

Dynamic grasping vibration suppression investigate
Active damping control
Because of the nonlinear characteristics such as flexible manipulator, flexible joint, backlash, and the impact excitation during the grasp, it is needed to control the manipulator in the grasping process, which in order to reduce the impact effect and make the manipulator achieve the stable state rapidly and smoothly.
As the collision impact is instantaneous, after the collision impact,

Neglect the impact of the base and the flexible modes motion on the manipulator and adopt the ADC to the joints

where
Joint ADC can increase the damp of the whole system in the grasping process to reduce the effect of collision excitation. In the real system, ADC can be achieved by friction that exists actually in the joint mechanism.
Optimal state feedback vibration suppression
The flexible manipulator vibration may cause the collision excitation in the grasping process, and result the higher frequency impact to the base. When the modal frequency is low, the excitation will even couples with the control system and causes resonance. Therefore, suppressing the vibration is the premise of safety grasping target.
The flexible space robot nonlinear dynamic model is linearized firstly, then the linear quadratic optimal control method is adopted to design the controller to suppress the vibration. For the flexible modal vibration, it is obtained by the last line of equation (3)

As the base movement is small, the impact of the base motion on the flexible mode can be neglected. And by neglecting the elastic modal higher order term, equation (10) is linearized as

where Lf
is the linear matrix of the modal coordinate velocity. Design new input variables

where


Suppose the linear quadratic optimal function as follows

where

According to the existing necessary conditions of the functional extremum, we have


The optimal state feedback input is

where

So the optimal state feedback is

Attitude undisturbed control
Joint ADC can eliminate the collision impact caused by flexible vibration effectively, but also transfer most part of the contact impulse momentum to the base, causing larger base attitude disturbance which is critical the base control accuracy and safety.
In the grasping control process, it is needed to suppress the flexible vibration, and it is important to reduce the impact on the base attitude as well. Therefore, reaction null space control (RNSC) 3 is introduced. To design the controller, the impact of flexible modal vibration on rigid body motion is neglected, and the base attitude is under no control, so equation (3) is rewritten as

The impact on the base is suppressed as linear impact and rotational impact separately

where the notation and superscript

where







In the equations, w is the mass of the entire system. According to the first line of equation (23), we know that

where

Substituting equation (31) into, we obtain the following equation

where



Then equation (33) is linearized, the designable nonlinear decoupled feedback controller is as follows

where

According to the assumption,
In order to complete the manipulator flexible vibration suppression, and meanwhile reduce the impact to the base attitude in the grasping process, new input items are designed as

where

Block diagram of control schema.

The first and second term
Simulation examples
The space robot consists of the base and the manipulator, and the manipulator includes two flexible links which have the same physical and geometrical parameters and are connected by revolute joints. The floating target is a rigid body only moving in a plane (Figure 2). Physical parameters are shown in Tables 1 and 2.
Parameters of target and space robot.

Parameters of flexible manipulator.

The flexible links are circular cross section tubes of uniform medium with the diameter of 0.01 m, length of 1 m. Cantilever model is applied, and first mode is taken account of (circular frequency of 9.971 Hz).
The simulation is conducted under the following conditions: Joint ADC parameter:
When no control is applied on the joint of the manipulator, the impact force of the end point is large with the amplitude of about 800 N (Figure 7); the flexible mode of the manipulator excites according to the impact force, and the maximum amplitude is about 0.03 (Figure 8); the base attitude varies slightly with the range of about 0.003 in radian (Figure 9); the joint angle varies slightly in the beginning of the grasping but fiercely in the end of the grasping procedure with the amplitude of about 0.5 (Figure 10).

Impact force (no control).

Modal coordinates (no control).

Base attitude angles (no control).
Joint angles (no control).
When joint ADC is applied on the manipulator, the impact force vibration reduces significantly compared with no control condition. There is slight oscillation only in the end period of the grasping, and almost no oscillation in the grasping process (Figure 11); the flexible mode varies with the impact force, and decays rapidly, the maximum amplitude is about 0.002, it is an order of magnitude less than no control condition (Figure 12); the base attitude varies significantly due to the transmission of impact momentum, and reaches 0.06 (Figure 13); the joint angle varies slightly due to the impact force in the end period of the grasping, while applying the damping control, the total vibration amplitude is less than 0.018 (Figure 14); the maximum control torque is about 9 Nm (Figure 15).

Impact force with ADC. ADC: active damping control.

Modal coordinates with ADC. ADC: active damping control.
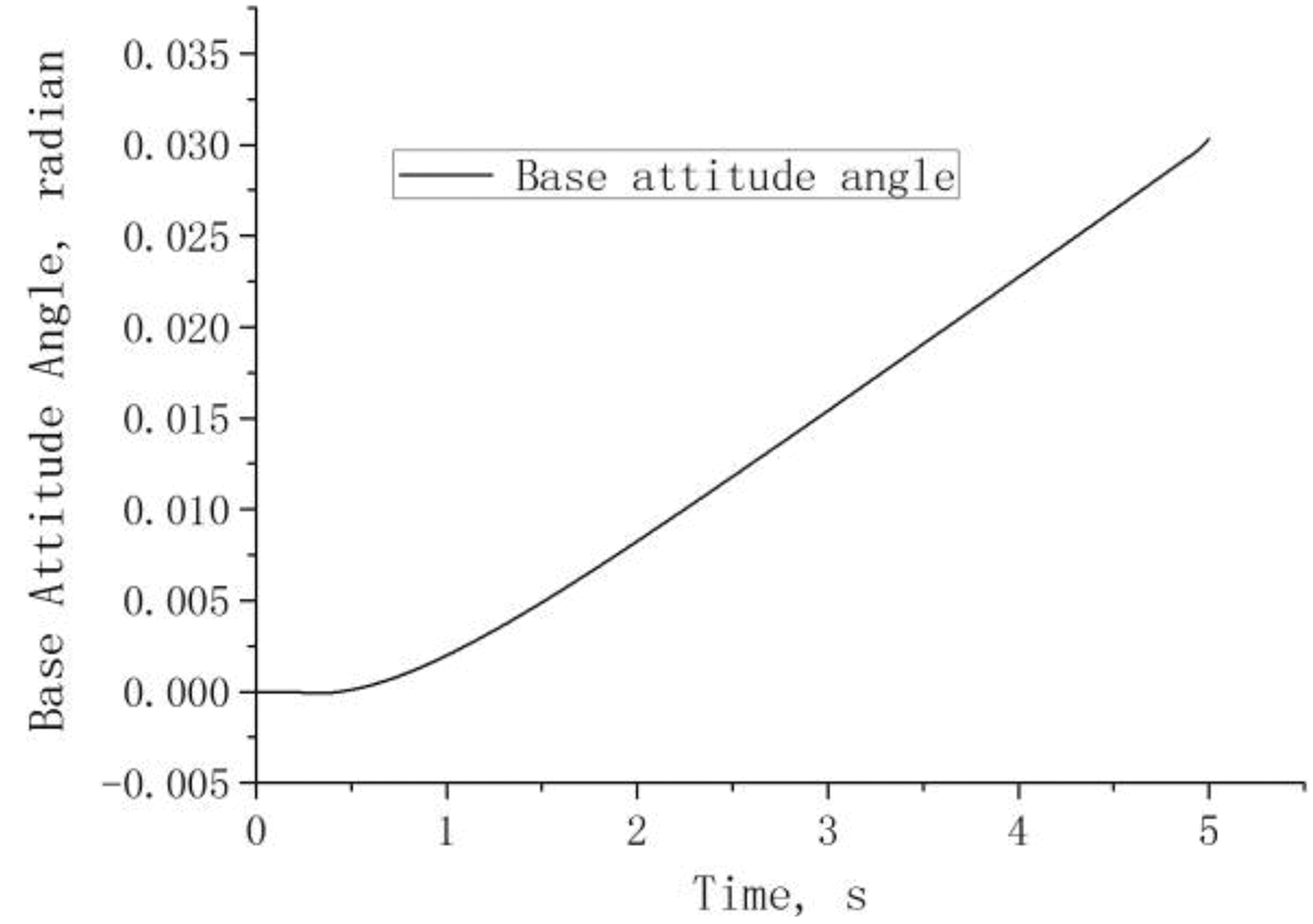
Base attitude angles with ADC. ADC: active damping control.

Joint angles with ADC. ADC: active damping control.

Joint torques with ADC. ADC: active damping control.
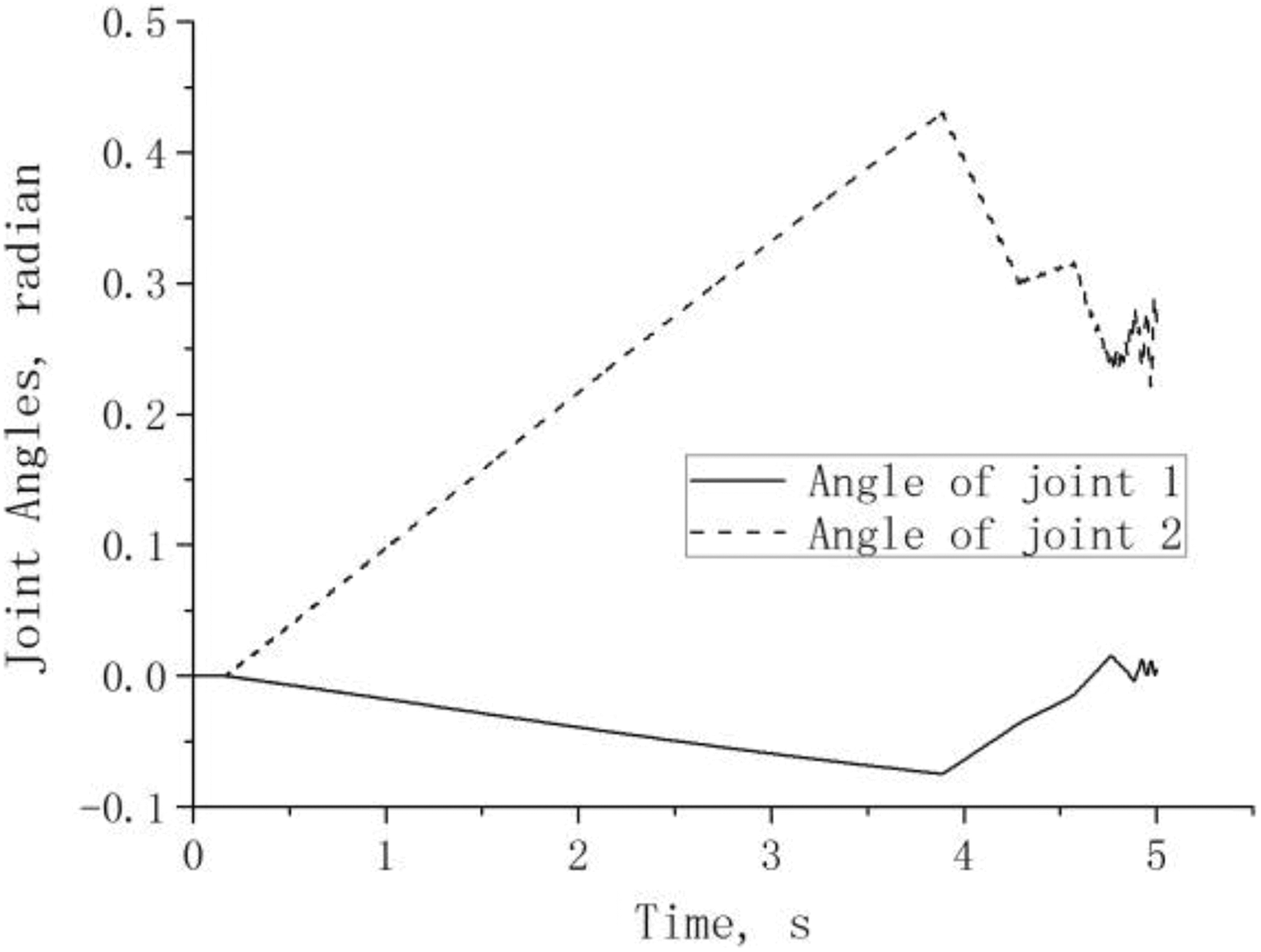
When RNSC is applied, the impact force vibration is equal to ADC (Figure 16); the maximum vibration amplitude of flexible mode occurs at the moment in the end period of grasping, same as ADC, but the mode vibration decays relatively slowly because of the joints null space motion (Figure 17); the amplitude of the base attitude variation is only 0.0006, two orders of magnitude less than ADC (Figure 18); the joint angle varies significantly with the range of about 0.12 because of the RNSC (Figure 19); the maximum control torque is about 16 Nm (Figure 20).

Impact force with RNSC. RNSC: reaction null space control.

Modal coordinates with RNSC. RNSC: reaction null space control.
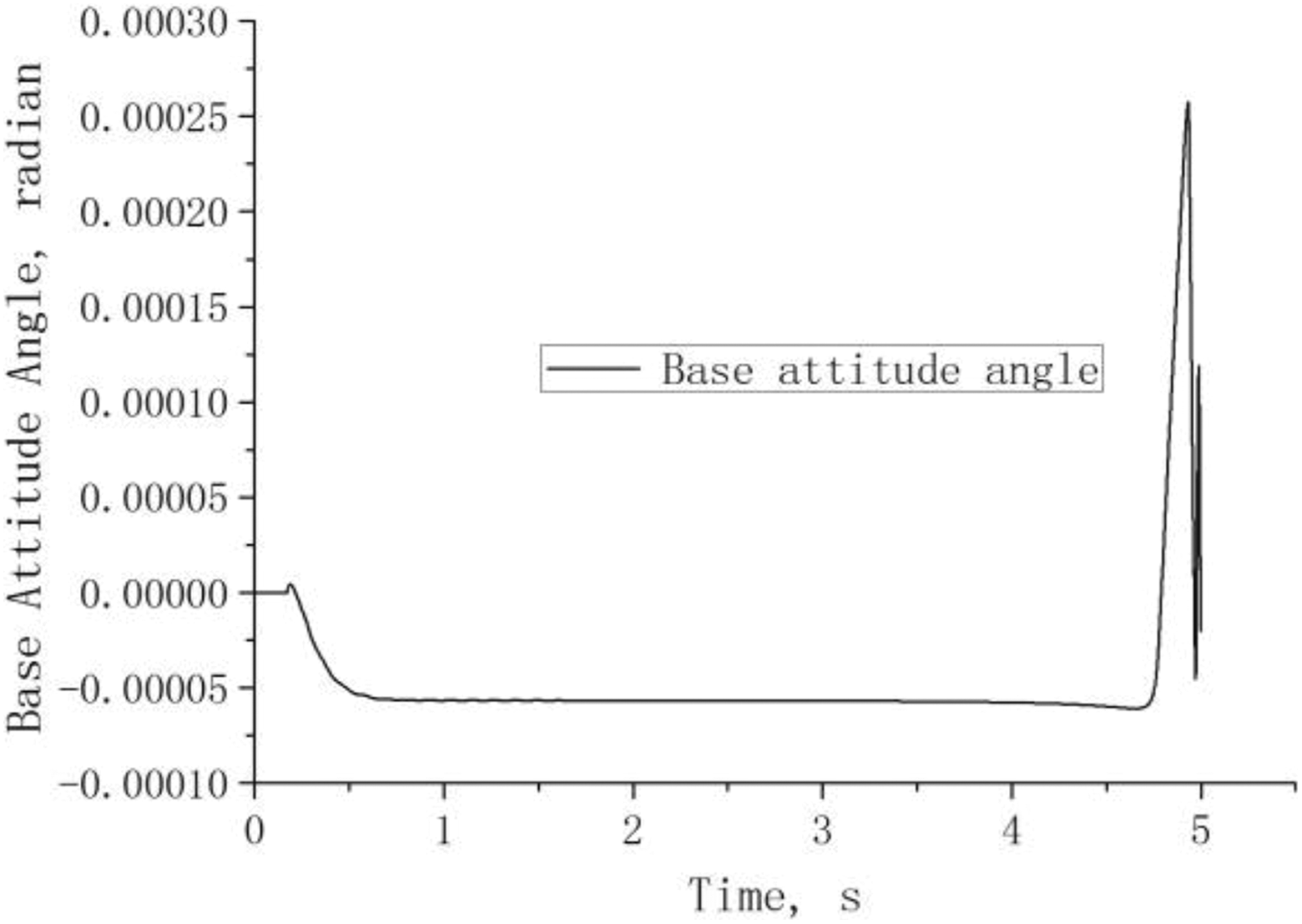
Base attitude angles with RNSC. RNSC: reaction null space control.

Joint angles with RNSC. RNSC: reaction null space control.

Joint torques with RNSC. RNSC: reaction null space control.
Simulation shows that: in the same grasping procedure, ADC is simple and reliable and can suppress the manipulator flexible vibration effectively with small control torque. But most of the impact momentum is transferred to the base platform, leading to significant variation of the base attitude, thus the attitude controller is easily to saturate which may make the base unstable.
Imposing optimal state feedback control in the reaction null space, the manipulator flexible vibration is suppressed effectively (an order of magnitude less than no control), and meanwhile the disturbance to the base attitude is almost zero (two orders of magnitude less than ADC), but the joint control torque is larger than the damping control, and the joint motion changes significantly. However, obtaining the more accurate base platform attitude and less vibration of the manipulator is beneficial to safety and performance of the whole system despite of a little larger control energy consuming.
Conclusion
In this article, we proposed a new control method for space flexible robot grasping a floating target. Compared to simple joint ADC during the grasping, the proposed method causes very little disturbances (two orders of magnitude less than simple ADC) to the base satellite platform due to RNSC, and meanwhile the imposed optimal state feedback control in the reaction null space efficiently suppressed the vibration of the manipulator. The proposed control scheme has good potential in space flexible robot grasping operation for minimizing both of the base disturbance and the flexible manipulator vibration. The practical applications and the experimental validations of this proposed method will be addressed in the future research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was funded by the Open Fund of Science and Technology on Space Intelligent Control Laboratory (No. ZDSYS-2017-07), and Open Fund of National Defense Key Discipline Laboratory of Micro-Spacecraft Technology (No. HIT.KLOF.MST.201703).