
Abstract
In this article, two new algorithms of the redundant force branch of 6-PUS/UPU parallel robot are proposed. They are model predictive control combining with proportional, integral, and differential algorithm and fuzzy combining with model predictive control algorithm. The shortcoming of the traditional model predictive control algorithm is complex adjustment, large amount of calculation, the dynamic performance effect of the system. The proposed PID model predictive control algorithm can make the controller parameters adjustment more convenient. However, PID model predictive control algorithm can’t obtain good control performance under sudden change in situation. Combining model predictive control algorithm with fuzzy theory, fuzzy model predictive control algorithm has better anti-interference ability than PID model predictive control algorithm and can reduce predictive horizon length as possible as it can. Simulation results show that fuzzy model predictive control algorithm can effectively improve real-time performance of control system, the dynamic tracking performance and robustness than the traditional model predictive control and PID model predictive control algorithm.
Keywords
Introduction
The parallel robot is superior to the serial robot in its rigidity, high precision, and load capacity. However, there are some problems which greatly limit the parallel robot in the wide range of practical applications, such as uncertainty, high nonlinearity, complicated mechanism control, large internal coupling force, singular points in the workspace, and so on. Redundant force control technology can effectively solve the above problems of the parallel robot. 1 –4
The redundant force branch control of the parallel robot can optimize the driving force of the redundant branch, improve the internal force and the whole rigidity of the system, and minimize the instantaneous driving force. 5 –7 To achieve the control purpose, 8 other motion branches use position control to ensure the motion accuracy of the parallel robot. However, it’s difficult to establish the dynamics expression equation because of complex and a large amount of calculation. So it is difficult to achieve real-time control for complex multi-degree of freedom (DOF) parallel robots, such as the 6-PUS/UPU 5-DOF parallel robot developed by our research team (the virtual prototype model in Figure 1). For the control problem of the complex object, many scholars have put forward some advanced control strategies. 9 –11 Model predictive control (MPC) has received wide attention in past decades due to its robustness with respect to model uncertainty. 12 –16 However, the MPC has a complex adjustment for parameters, the amount of calculation of MPC algorithm will increase significantly when control horizon and prediction horizon become large. In practice, tremendous computation will result in delay which can influence dynamic performance of the system.

The virtual prototype model.
In this article, PID model predictive control (PPC) algorithm and fuzzy model predictive control (FPC) algorithm are proposed. PPC algorithm can improve complex adjustment of parameters and FPC algorithm can further improve tremendous computation than PPC algorithm. At present, the predictive control algorithm usually regards a quadratic index function consisting of sum of the output error square and the control signal square of the system as the control objective function in a certain time domain. Then the optimal control output can be obtained by minimizing the objective function. Combining the PID algorithm with MPC algorithm, PPC algorithm 17 can make full use of the advantages of both algorithms, such as the simple principle of control, convenient parameter adjustment, and easy engineering implement. PPC algorithm designed a new type of predictive control evaluation function based on the MPC. At the same time, even though the MPC algorithm has stronger robustness than PID algorithm for the parallel robot under the condition of disturbance, there is still a sudden change in situation. So FPC algorithm is proposed to further improve the robustness of the parallel robot control system. Combining MPC algorithm with fuzzy control algorithm, FPC algorithm can reduce predictive horizon length as possible as it can and improve the real-time performance of control system using fuzzy. 18,19
This article is organized as follows. The second section introduces control design of the system, including PPC algorithm and FPC algorithm. The third section shows the simulation results. The final section summarizes the article.
Control design
PPC algorithm
Combining PID algorithm with MPC algorithm, PPC algorithm introduces the proportional, integral, and differential parameters by adding new object function, which makes the controller have the structure features of proportion, integral, and differential. The new designed controller can adjust the parameters more conveniently, which also helps to overcome uncertainty problem of traditional MPC algorithm. Defining the future P step, PPC performance index function of the system 20,21 is as follows
Equation (1) can be written in vector form


where KP, KI, and KD
are proportional coefficient, integral coefficient, and differential coefficient, respectively.
So




Let

If

From equation (9), we can obtain

FPC algorithm
Although the parameter adjustment using PPC algorithm is more convenient than that of MPC algorithm, the anti-interference ability of the PPC still needs to be improved. FPC is the combination of MPC with fuzzy control. Fuzzy control can minimize the length of predictive time domain, which can reduce computation, and improve the real-time performance, tracking performance, and robustness 14,15 of the control system.
FPC controller designed in this article is mainly composed of three parts. They are predictive model, performance measurement, and control decision. The control system of the permanent magnet synchronous motor is a double-input and double-output system, and the prediction model is given in the study by Shuhuan et al. 3 The performance measurement is to evaluate the control effect of the control input hypothesis and determine the control decision based on the evaluation results. In the vector control of the permanent magnet synchronous motor, the control input is ud and uq. In order to evaluate the control effect of ud and uq, 49 statements written in the rule matrix are shown in Table 1. Its rules are written in the following form:
Performance measurement rules.

If E is Ai and CE is Bj then P is Cij.
where E and CE are the predictive error
In this article, the membership function of the input and output of the fuzzy controller is used in combination of triangular with trapezoidal form. Fuzzy control system is established according to the rules of performance measurement shown in Figure 2.

Fuzzy control system.
Firstly, the domain of ud and uq is divided into several subdomain, and the demarcation point is regarded as a reference value.
Control effect of ud and uq for output id and iq is determined by performance measures value pd and pq. According to the rules of performance measurement, the smaller pd and pq are, the better control effect is. udi is one of the m reference values in ud domain, uqji is one of the n reference values in ud domain, and then control effect of udi and uqj for output id and iq can be expressed as

where pdi and pqj are performance measures value of udi and uqj for output id and iq. At current time, the best reference control



Assuming error and error change rate of id and iq are
If


Otherwise


where
In summary, the FPC steps for permanent magnet synchronous motor can be summarized as follows: Determine If Obtain future output predictive value according to the predictive model under reference control udi and uqj. Calculate performance measurement value pdi and pqj of udi and uqj according to the performance measurement rules. Determine the optimal reference control input Calculate control input Implement Let
Simulation
In order to test the valid of the proposed PPC method and FPC method, torque controller of permanent magnet synchronous motor is designed. Under torque ripple and load disturbance, the control performance of motor torque using MPC, PPC, and FPC controllers are compared.
In this article, the parameters of the simulated motor in the simulation are the nominal parameters of the practical motor shown in Table 2.
Parameters of PMSM.

Note. EMF: electromotive force; PMSM: permanent magnet synchronous motor.
The parameter of the 6-PUS/UPU parallel robot model are shown in Table 3.
Parameters of 6-PUS/UPU parallel robot model.

In the fixed coordinate system, the robot runs from point A (0, 0, 928.5273) to point B (−100, −100, 928.5273), then runs from point B (−100, −100, 928.5273) to point C (100, 100, 928.5273). In the joint simulation, the trajectory planning must be carried out and ensure the speed of the initial time and the end time are all zero, so that the acceleration of the moving platform motion can be limited. In this article, the cubic spline curve is used for trajectory planning. The cubic spline curve as follows

First-order derivation as equation (20)

Second-order derivation as equation (21)

Due to the displacement of initial time, the speed of the initial time and the ending time are known, so the coefficients can be obtained from equations (19
–21).
The predictive horizon and control horizon of the PPC controller and the FPC controller are
All controller parameters are unchangeable, and white noise interference with the amplitude 0.1 is added to the 5-DOF redundant actuation parallel robot. Torque tracking effect of the PFC controller, PPC controller, and FPC controller using permanent magnet synchronous motor is shown in Figure 3. In Figure 3, the transient response of the torque is very fast using MPC, PPC, and FPC controller; the slope of rising is pronounced, reaching 30 N·m at 5 ms, and the peak occurs at approximately 7.5 ms; the tracking effect of the torque curve is stable. The motor control using MPC, PPC, and FPC controller can overcome the torque ripple. However, the motor torque tracking curve using FPC controller has the minimal overshoot.

Torque tracking response curve of PMSM using MPC, PPC, and FPC controller with torque ripple. FPC: fuzzy model predictive control; PPC: PID model predictive control; MPC: Model predictive control; PID: proportional, integral, and differential.
Keeping the parameters of PFC, PPC, and FPC controller unchangeable, pulses with amplitude value 10 are added to simulate the load disturbance of the motor at 0.025 s time. The torque tracking effect using MPC, PPC, and FPC controller is shown in Figure 4. In Figure 4, the transient response of the torque is very fast using MPC, PPC, and FPC controller, the torque reaches steady state at 0.035 s. FPC controller can make the motor with load disturbance have minimum influence and track a given value quickly when load disturbance exists in the motor running. However, the anti-interference ability of the PPC controller and the MPC controller is almost same. PMSM torque control using FPC controller can get better anti-interference ability than MPC and PPC controller and further improve the robustness of the system. The control performance of PPC is the same as the MPC in the small predictive time domain and the control time domain. The parameter adjustment using PPC algorithm is more convenient and the computation quantity is reduced than MPC algorithm.

Torque tracking curve of PMSM using MPC, PPC, and FPC controller with load disturbance. FPC: fuzzy model predictive control; PPC: PID model predictive control; MPC: Model predictive control; PID: proportional, integral, and differential.
FPC algorithm and PPC algorithm are used in the redundant force branch of 6-PUS/UPU redundant actuation parallel robot. Under the same interference, the actual driving force of each branch of the parallel robot is shown in Figures 5, 6, and 7. The error of the actual driving force of each branch of the parallel robot is shown in Figures 8, 9, and 10.
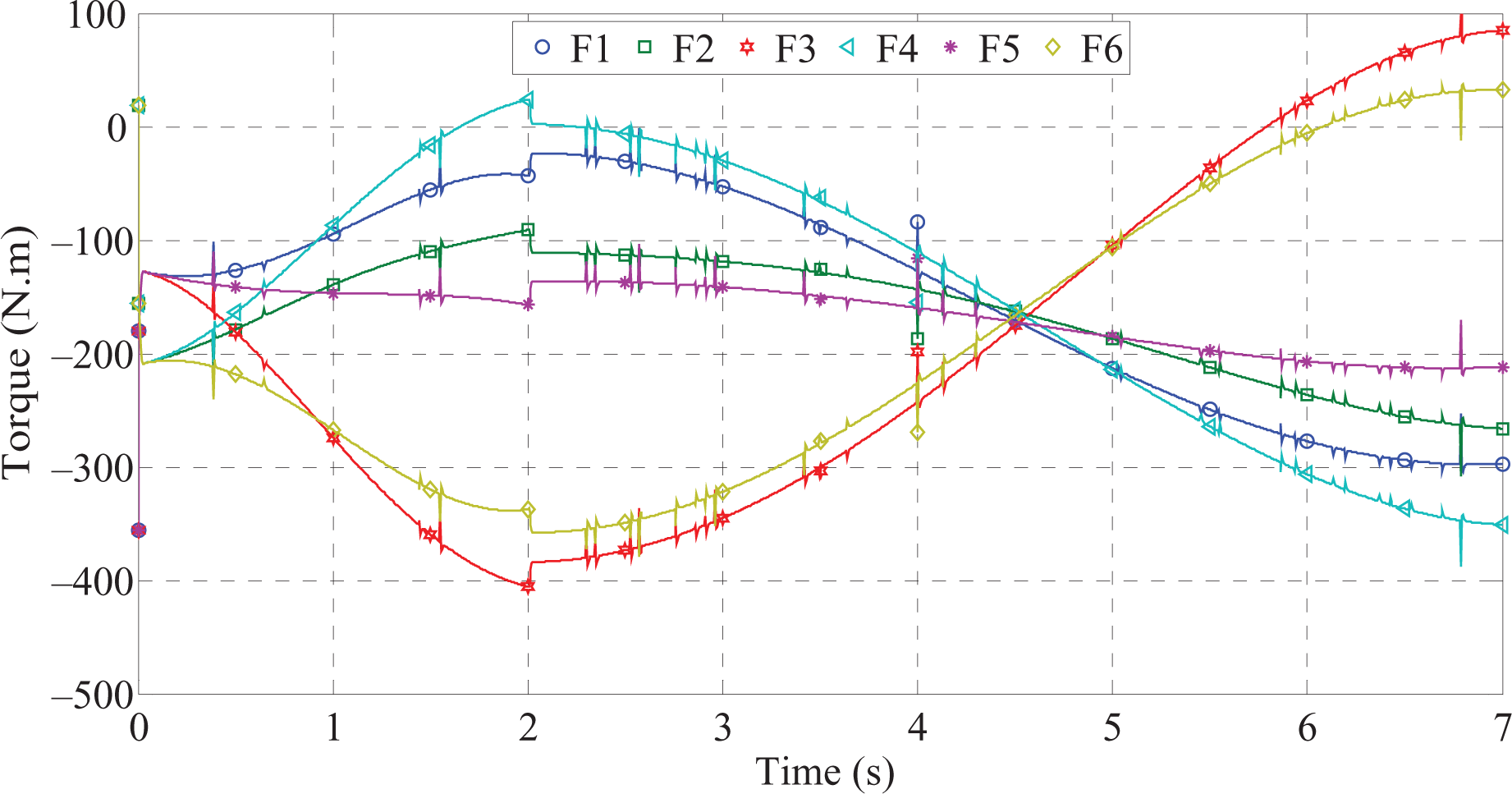
Actual driving force branch of parallel robot using MPC with interference. MPC: Model predictive control.

Actual driving force branch of parallel robot using PPC with interference. PPC: PID model predictive control; PID: proportional, integral, and differential.

Actual driving force branch of parallel robot using FPC with interference. FPC: fuzzy model predictive control.
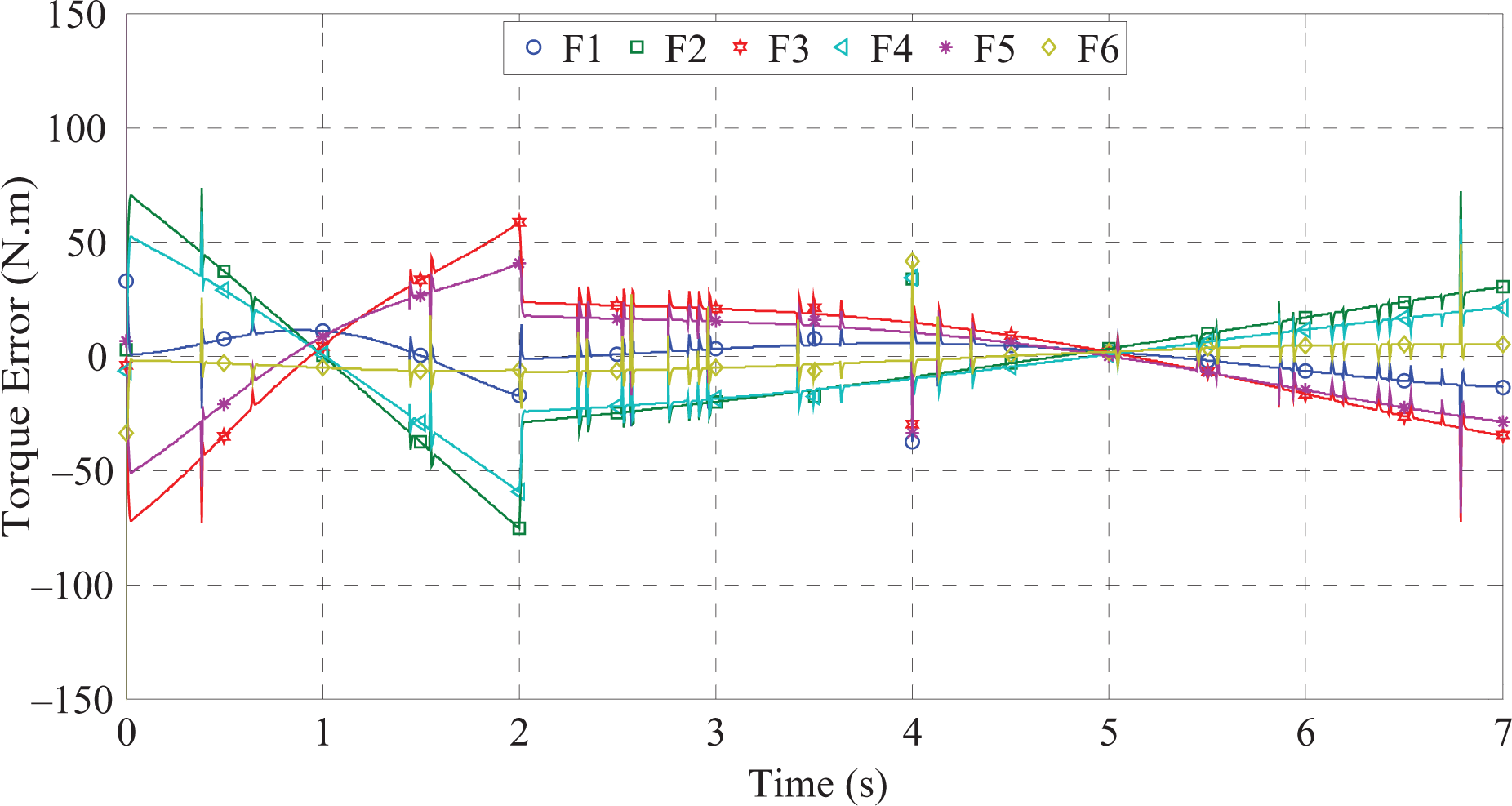
Each driving force branch error of the parallel robot using MPC with interference. MPC: Model predictive control.

Each driving force branch error of the parallel robot using PPC with interference. PPC: PID model predictive control; PID: proportional, integral, and differential.

Each driving force branch error of the parallel robot using FPC with interference. FPC: fuzzy model predictive control.
The actual driving force curves of the redundant branch of parallel robot using PPC controller and MPC controller have ripple by comparing Figures 5, 6, and 7 under the same interference. And the ripple using PPC controller and MPC controller is almost same. However, the actual driving force curves of parallel robot using FPC algorithm are smooth and there is no ripple. FPC algorithm used in the driving force control of redundant branch of parallel robot can obtain better anti-interference ability than MPC. FPC algorithm can further improve the robustness and whole control performance of parallel robot effectively. PPC algorithm can obtain the same control performance as MPC algorithm, but PPC algorithm has less calculation and better real-time than MPC algorithm.
In order to quantitatively analyze the advantage of driving force control of the redundant branch of parallel robot using FPC and MPC, the evaluation criterion of the average amplitude error is established to analyze driving force error of six branches of parallel robot. The evaluation criterion is as follows

where EMPC is the average error of driving force of a single redundant branch of parallel robot using MPC, E FPC is the average error of driving force of a single redundant branch of parallel robot using FPC, and I FM is the improvement quantity of control accuracy of the driving force comparing FPC with MPC. Similarly, driving force error of each branch of parallel robot using PPC and MPC is compared. E PPC is the average error of driving force of a single redundant branch of parallel robot using FPC and I PM is the improvement quantity of control accuracy of the driving force comparing PPC with MPC. The control accuracy of driving force of each branch of parallel robot using MPC, PPC, and FPC controllers is shown in Table 4.
Comparison of control accuracy of driving force using FPC, PPC, and MPC.

FPC: fuzzy model predictive control; PPC: PID model predictive control; MPC: Model predictive control; PID: proportional, integral, and differential.
In Table 4, under interference, the average error of driving force of six redundant branches of parallel robot using MPC is 14.64, the average error of driving force of six redundant branches of parallel robot using PPC is 14.58, and the average error of driving force of six redundant branches of parallel robot using FPC is 14.49. The improvement quantity of control accuracy of the driving force comparing PPC with MPC is 0.41% and the improvement quantity of control accuracy of the driving force comparing FPC with MPC is 1.0%. The control performance of the driving force of the redundant branch of parallel robot has been significantly improved using FPC under interference. And the control performance of the driving force using PPC is also improved. But the improvement quantity of control accuracy of the driving force using FPC is better than that of PPC.
Based on the above analysis, FPC controller can improve the robustness and control performance of the driving force of the parallel robot system greatly. The control performance of PPC controller and the MPC controller is almost same. The parameters using PPC method are adjusted by PID, which makes controller adjustment convenient and reduces computation.
Conclusion
In this article, two improved control methods—PPC and FPC are proposed in order to improve the application of the MPC algorithm in the control of parallel robot. PPC controller and the FPC controller are designed, respectively. MPC method and the two proposed PPC and FPC method are compared by simulation. PPC algorithm has the advantages of PID algorithm and MPC algorithm. PPC algorithm can still obtain satisfied control result in narrow control time domain and predictive time domain by introducing the PID parameters KP, KI, and KD. It can reduce tremendous computation and improve the real-time of the system. The FPC algorithm combining the fuzzy theory with the MPC can reduce the dependency of the system on the model and further improve the robustness of the parallel robot. The above experiment was completed in the simulation environment, we will do the experiments in the next step.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was partly supported by the National Natural Science Foundation of China (project nos 61773333, 61473248), the major project of Science and technology in Hebei Universities (project no. ZD2016150).