
Abstract
A multi-robot system consists of a number of autonomous robots moving within an environment to achieve a common goal. Each robot decides to move based on information obtained from various sensors and gathered data received through communicating with other robots. In order to prove the system satisfies certain properties, one can provide an analytical proof or use a verification method. This article presents a new notion to prove visibility-related properties of a multi-robot system by introducing an automated verification method. Precisely, we propose a method to automatically generate a discrete state space of a given multi-robot system and verify the correctness of the desired properties by means of model-checking tools and algorithms. We construct the state space of a number of robots, each moves freely inside a bounded polygonal area with obstacles. The generated state space is then used to verify visibility properties (e.g. if the communication graph of robots is connected) by means of the construction and analysis of distributed processes model checker. Using our method, there is no need to analytically prove that the properties are preserved with every change in the motion strategy of the robots. We have implemented a tool to automatically generate the state space and verified some properties to demonstrate the applicability of our method in various environments.
Introduction
In multi-robot systems (MRS), a collection of two or more autonomous robots can solve problems in a broad range of applications by collaborating with each other and sensing environments. For example, teams of mobile robots have been used for inspection of nuclear power plants, 1 aerial surveillance, 2 search and rescue, 3 and underwater or space exploration. 4 In many applications within the general area of robot motion planning, visibility problems play an important role.
There has been a close relationship between robot motion planning and computational geometry in the applications where the robots navigate within a geometric domain. Traditionally, there has been a research area with the goal of minimizing the number of (stationary) guards or surveillance cameras to guard an area in the shape of a certain geometric domain like extensions of art gallery problems. 5 Moving to the area of mobile guards, Durocher et al. 6 considered the sliding cameras problem in which the cameras travel back and forth along axis-aligned line segments inside an orthogonal polygon. In the Minimum Sliding Cameras (MSC) problem, the objective is to guard the polygon with the minimum number of sliding cameras. In MSC problem, it is assumed that the polygon is covered by the cameras if the union of the visibility polygons of the axis-aligned segments equals the polygon. One of the original works on the subject of mobile guards is studied by Efrat et al., 7 considering the problem of sweeping polygons with a chain of guards. They developed an algorithm to compute the minimum number of guards needed to sweep a polygon.
Commonly, within the context of computational geometry such as the previous works mentioned above, analytical proofs are provided to show that the given robot navigation algorithms satisfy some certain properties (e.g. global connectivity among the robots is always preserved). In cases when the planning algorithms get complex, it may be hard or even impossible to provide any analytical proofs. Furthermore, when it comes to practical applications of robot navigation algorithms, in order to find a solution that satisfies the problem’s constraints, the designer may adjust some algorithm’s parameters or refine the algorithm in such a way that the whole robot movement strategy changes. This way, it may not be practical to repeatedly provide analytical proof for such modified algorithms.
An alternate and more reliable approach to investigate the correctness of the motion algorithms is formal verification, specifically, model-checking, 8 which has become more popular in recent years. Here, a mathematical model of all possible behaviors of the system is constructed, often as a state transition system, and is automatically verified against the desired correctness properties over all possible paths. The properties are often expressed in temporal logic formulas.
In some previous works, model-checking has been used to verify motion planning algorithms with respect to problem’s constraints. In Fainekos et al., 9 the authors used a discrete representation of the continuous space of the movement of a single robot, producing a finite state transition system. Later, Fainekos et al. 10 extended the previous framework to multiple robots. These frameworks generate a motion plan for the robot to meet some regions of interest inside a polygon in order to satisfy a given linear temporal logic (LTL) 11 formula.
Another related area to which model-checking techniques have been applied are robot swarms. In Liu and Winfield, 12 a swarm of foraging robots is presented and, in Konur et al., 13 is analyzed using the probabilistic symbolic model checker. 14 A hierarchical framework for model-checking of planning and controlling robot swarms is suggested by Kloetzer and Belta 15 to make some abstraction of the problem including the location of the individual robots. Dixon et al. 16 used model-checking techniques to check whether desired temporal properties are satisfied to analyze emergent behaviors of robotic swarms. Moreover, Brambilla et al. 17 introduced property-driven design, a top-down design method for robot swarms based on prescriptive modeling and model-checking. In 2014, Guo and Dimarogonas 18 proposed a knowledge transfer scheme for cooperative motion planning of multi-agent systems. They assumed that the workspace is partially known by the agents where the agents have independently assigned local tasks, specified as LTL formulas.
More recently, Sheshkalani et al. 19,20 focused on the verification of certain properties on an MRS in a continuous environment. In Sheshkalani et al., 19 the robots were assumed to move along the boundaries of a given polygon. They constructed a transition system on which the visibility properties can be investigated. Later, Sheshkalani et al. 20 made the problem more general and let the robots move along simple paths inside the environment.
We believe that the results presented by Sheshkalani et al.
19,20
are restrictive in the sense that the robots are only allowed to move along predefined paths within a simple polygon. So, in this work, we propose a method to overcome the previous restrictions. Specifically, this article is different from the previous work
20
in the following points: A new notion of state definition is proposed, so that robots can navigate the environment freely without any movement restrictions. It is allowed to have obstacles inside the environment. A theoretical discussion is provided to show that the number of states is finite. To demonstrate the applicability of the proposed method, some simulation results are provided in various environments over two case studies (e.g. a decentralized swarm aggregation algorithm
21
).
As an application of the problem studied in this article, the problem of guarding a bounded environment with a number of sliding cameras can be viewed as a special case of our problem. This way, our method is related to the previous study. 6 Note that the mentioned study address the combinatorial optimization problem of minimizing the number of cameras. On the other hand, we address the problem of verifying the correctness of the motion strategies for the given system. Another, more interesting, application of the problem is to consider the connectivity preserving (global connectivity maintenance) of the communication graph. Sabattini et al. 22 proposed a method to preserve the strong connectivity by estimating the algebraic connectivity of the communication graph in a decentralized manner. This way, our method can be used to guarantee the correctness of the desired requirements related to the Connectivity property.
The inputs to our method are comprised of (1) the environment, in the form of a polygon with obstacles, (2) the algorithms controlling the motions of the robots, (3) the initial positions of robots, and (4) the correctness property, expressed as a temporal logic formula. The output of the method is a True/False answer to the desired property as well as a transition system, labeled by two visibility-related atomic proposition: Connectivity (the communication graph of the robots is connected) and Coverage (the robots can collectively see the entire environment). The generated transition system is used to model check the visibility properties expressed in temporal logic formulas over the mentioned atomic propositions. The problem is defined more elaborately in the “Preliminaries and problem definition” section.
Our method is abstract from the specific motion planning algorithms in the sense that each robot may be programmed with a separate algorithm which during the execution may cause the robot to sense the surroundings through various sensors or perform communications with other robots. Precisely, the robots’ navigation algorithms are seen as a black box which means that the required information (e.g. other visible robots’ locations and the geometry of the their surroundings) are given to each algorithm as the inputs, and then the output of the algorithms provides a decision about the next movement of the robots (e.g. in the form of a pair of values for the direction and the distance). In the end, all the sensing, communication, and internal logic lead to movement steps which are treated as actions by our method, causing transitions between states.
In general, the environments in which the robots navigate can be discrete (e.g. a grid) or continuous. In the discrete environments, 16 a state is a snapshot of the grid which specifies the cells that have some robots inside (static discretization). In contrast to the discrete environments, when talking about continuous domains (like this work), the robots may move continuously to any arbitrary locations inside the environment. So, we need to dynamically discretize the environment in such a way that the underlying properties can be verified. This way, we define a notion of state for such a system to construct a transition system on which the properties can be verified using the conventional model-checking algorithms (“Constructing the discrete state space” section).
Additionally, we provide a proof of correctness for the proposed state space generation algorithm and show that the size of the state space is bounded (“Analysis” section). Finally, to give some intuition about the number of states and the amount of time needed to be generated, we have implemented a tool to automatically generate the state space and verify the correctness of some requirements using the construction and analysis of distributed processes (CADP) 23 tool to demonstrate the applicability of our method in two case studies explained in “Case studies” section.
Preliminaries and problem definition
The following definitions are borrowed from Ghosh. 24 A polygon P is defined as a closed region in the plane bounded by a finite set of line segments (called edges of P) such that there exists a path between any two points inside P that intersects no edge of P. Each endpoint of an edge of P is called a vertex of P. A vertex of P is called convex if the interior angle at the vertex formed by two edges of that vertex is at most 180°; otherwise it is called reflex.
Definition 1
Visibility.
24
Two points ri and rj in P are said to be visible if the line segment joining ri and rj contains no point on the exterior of P. This means that the segment
For a polygon P with obstacles, we use the notation

The shaded area indicates the visibility polygon of point r3 (
Consider a polygon P with obstacles whose boundary is specified by the sequence of n vertices Each robot ri acts based on the corresponding navigation algorithm ai inside P. Each step in the movement of each robot is specified by a pair (θ, δ) where θ is the direction of the movement, and δ is the distance the robot moves (both values are real positive numbers).
To study the characteristics of the system, we use state space which is a mathematical model of a physical system. Each state is connected to some related states by means of transitions. To discretize the state space of the system, we assume that the robots have turn taking movements (e.g. during the movement of a robot, the position of other robots is fixed), as described by Dixon et al. 16 and Antuña et al. 25 As stated in Peled et al., 26 it is possible to have one of the following cases in order to check automatically the properties of a finite state system whose structure is unknown: (a) a precise bound l on the number of states is known, (b) the size of the state space is not known precisely: an upper bound l is available, and (c) no bound l is known on the number of states. Since our method is abstract from the specific motion planning algorithms (each algorithm in Alg set is treated as a black box), no bound l is available on the number of states. So, as Peled et al. 26 suggested for case (c), we may let our method run so long as the available time and space resources allow. This way, the guarantees depend on the running time of our proposed method. Since the robots usually have a specific common goal which prevents the robots from making arbitrary actions, the number of generated states converges (no new state is generated after a significant amount of time running the proposed method) reasonably fast as is shown in “Case studies” section.
The correctness properties may be described using temporal logics which are formalisms to express temporal properties of reactive systems.
27
Apart from the logical operators, temporal logic formulas are constructed over a set of atomic propositions which may be True or False in each state of the system. To the discussion in the previous paragraph, since it is not possible to be sure that the constructed state space is complete, we have to evaluate LTL over finite traces, namely LTL
f
.
28
As stated by De Giacomo et al.,
29
LTL
f
uses the same syntax as of the original LTL.
11
The classical LTL formulas have different meanings on finite traces as discussed by De Giacomo and Vardi.
28
To bring an example, the following are some classical LTL formulas and their meaning on finite traces: “Safety”: □φ means that always till the end of the trace φ holds. “Liveness”: ⋄φ means that eventually before the end of the trace φ holds.
We refer the reader to previous studies 28 –30 for related discussion about LTL over infinite and finite traces. From now on, the LTL modalities □ and ⋄ are interpreted according to LTL f semantics.
Since our goal is to verify visibility properties, we need to define the two following properties:
Definition 2
Connectivity. The set of robots are connected if the graph induced by the visibility relation between pairs of robots is connected.
Definition 3
Coverage. The robots cover P if the union of the visibility polygons of all robots
Since we do not deal with the details of model-checking algorithms directly in this article, we refer the reader for a detailed description of temporal logics to Baier and Katoen.
27
However, to bring an example, the LTL
f
formula
We define an MRS as the tuple
Constructing the discrete state space
With the ultimate goal of verifying a temporal logic formula over an
We define the LTS of MRS as the tuple
S is the set of states (defined below); Act is the set of actions denoting the movements of the robots (precisely defined in subsection Transition Events);
System states
The satisfaction of AP depends on the distribution of the robots’ position inside P. We model each state of the system based on the topology of the robots and the vertices of P.
Consider the union of all the windows of the robots

A subdivision which consists of the intersection of line segments in W inside P.
Definition 4
Dual graph. Let SubP be a subdivision of P. The dual graph of SubP that is represented by
Consider Figure 2. Based on the Definition 4, we assign a node (denoted by ni for 1 ≤ i ≤ 10) corresponding to each cell of the subdivision (Figure 3). Next, we connect each pair of nodes with an edge, iff their related cells have an edge in common. The obtained

The corresponding node of each subdivision’s cell is depicted (denoted by ni).

The dual graph of subdivision SubP.
The dual graph
Assume that we consider
As an example, consider SubP as depicted in Figure 5. Suppose that r1 decides to move toward p1 (while other robots stand still). Consequently, the window
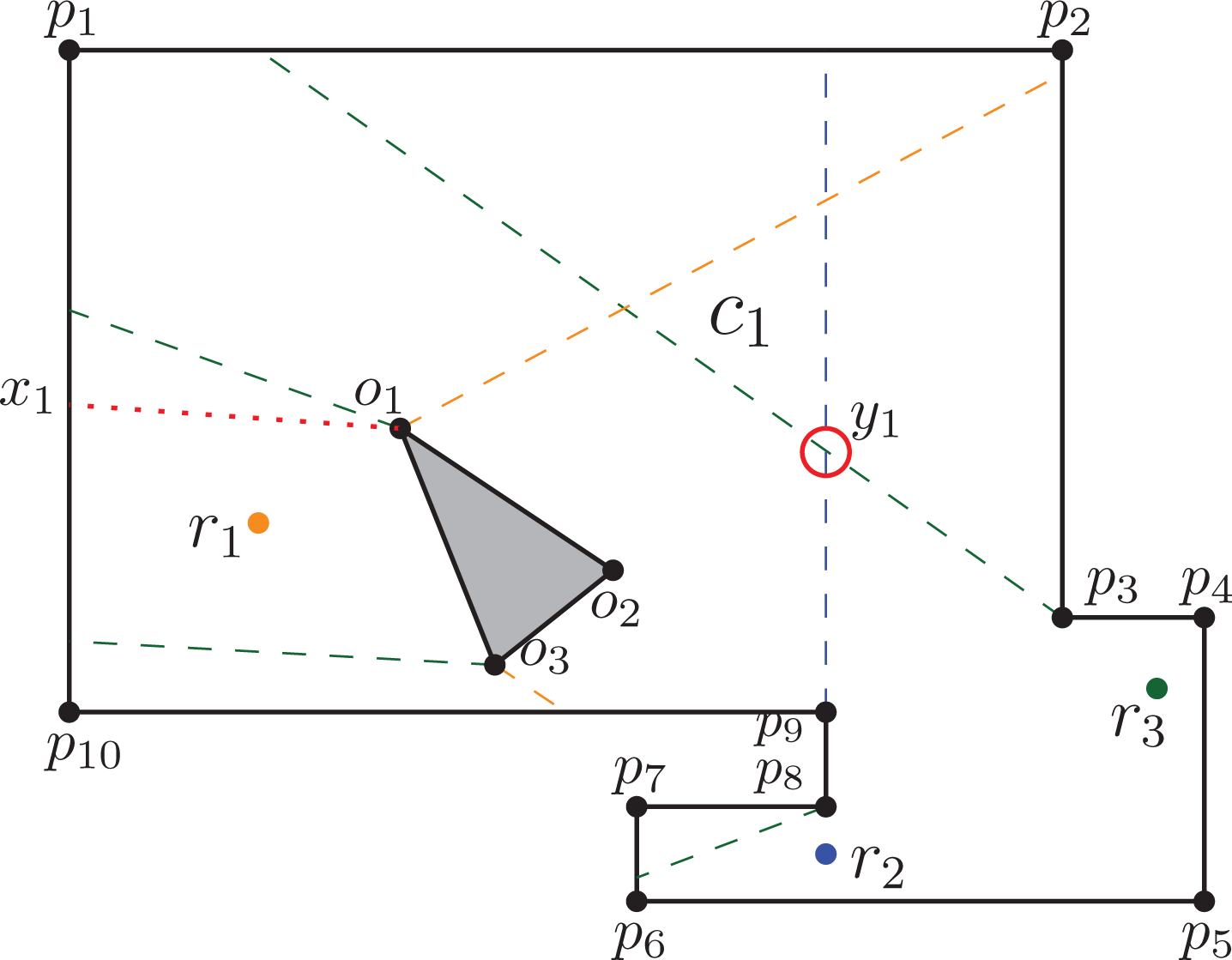
Connectivity and Coverage properties are not satisfied.

Robot r1 moves toward p1 in such a way that it crosses
Let
Overlaid subdivisions of SubP (dashed line segments) and
Definition 5
State. We define a state of k robots inside the polygon P as the pair:
To conform the standard notion of LTS, we must show that each atomic proposition is either True or False in a state. The following lemma states that moving of the robots does not change the validity of the propositions Connectivity and Coverage, as long as the state defined above remains the same.
Lemma 1
Each state s can be uniquely labeled with the atomic propositions
Proof outline
Assume that the labeling
Connectivity
Two robots ri and rj are connected, if one lies in the visible area of the other
Coverage
Polygon P is covered if and only if all the cells in SubP are covered by the robots. Assume that there exists at least one cell, say c1, which is not visible from any of the k robots (Figure 5). The polygon remains uncovered as long as c1 is not destructed. More precisely, the polygon may become covered if the uncovered cells destructed. On the other side, assume that all the cells of SubP are covered by the robots. In order to make P uncovered, a new cell which is not visible from the robots to be constructed in SubP is needed. Since any changes in validity of Coverage need to make SubP different from its previous structure, Coverage is valid while s does not change. □
Transitions events
During the execution of an MRS, when the robot ri takes its turn to move, its motion algorithm ai determines the next step of the movement as a pair (θ, δ), where θ is the direction of the movement and δ is the distance the robot moves. Based on the position of ri, it may cross one of the boundary edges of the cell it currently resides in. So, the movement with distance δ may result in a sequence
We define the transition relation of the LTS, say ↪, as the smallest relation containing the tuples Some cells constructed or destructed in SubP which leads to changes in A robot crosses a window of W and moves into another cell of SubP. If none of the two above types have occurred after the movement of the robot, it must be checked whether
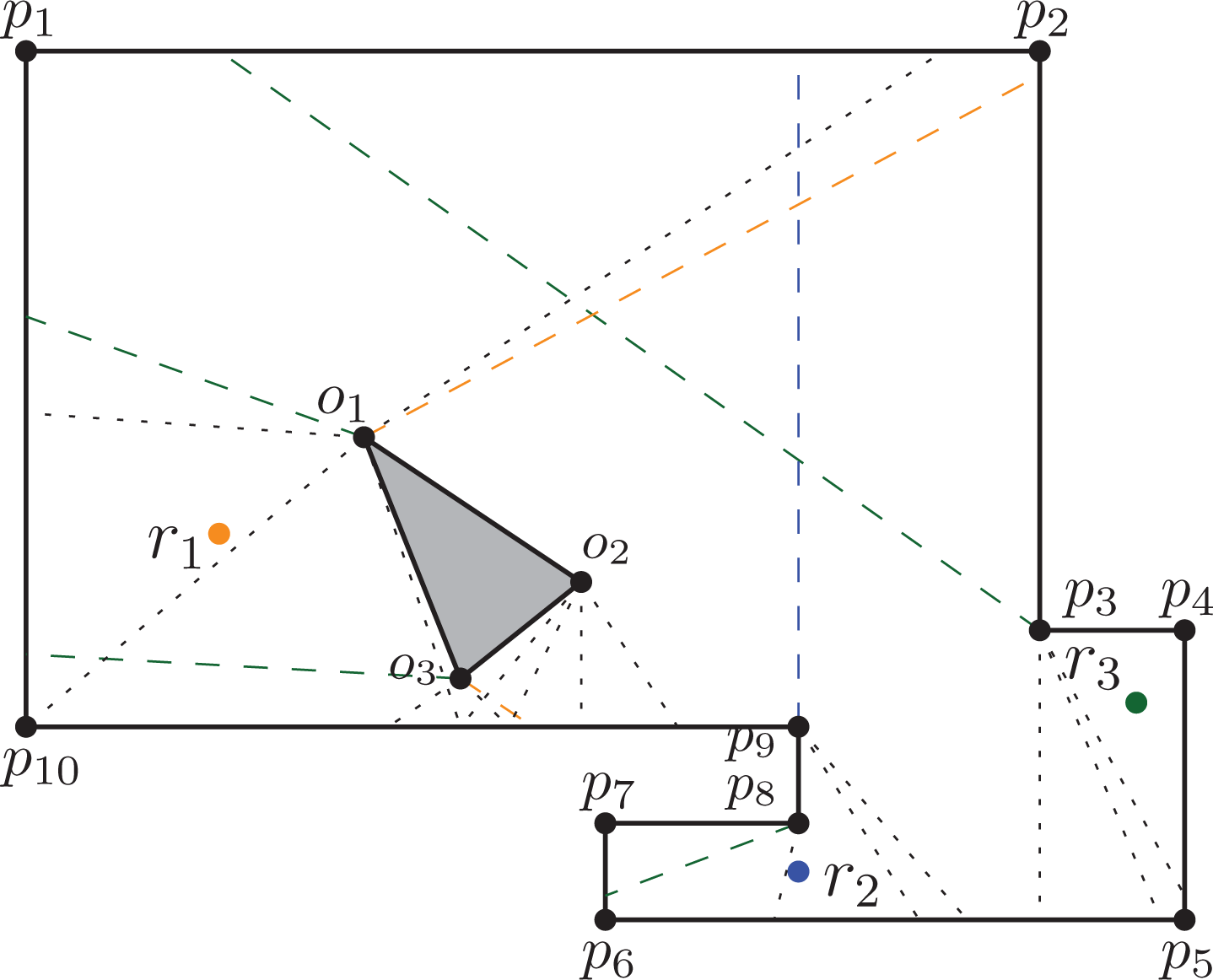
As an example, consider Figure 5 (both Connectivity and Coverage properties are not satisfied). Assume that robot r1 moves toward p1. As depicted in Figure 6, it destructs cell c1 and makes Coverage property satisfied (transition type (a)). Furthermore, based on Figure 8, robot r1 moves again toward p1 till reaches window

Connectivity property is satisfied after r1 crosses
We may use the plane sweep algorithm
32
in order to find out when ri reaches an intersecting point in SubP for type (a). More precisely, radial sweep algorithm
33
may be used to rotate
Based on Lemma 1, the validity of AP only changes in transition types (a) or (b). So, if we construct the states which are generated by the type (c) transitions as little as possible during the movement, we may have some reduction in the complexity of the state space. Assume that robot ri moves from its current position
As an example, consider Figure 8. Robot r3 is located in the cell associated with the set of line segments

Robot r2 moves to the right in such a way that the cell that has r3 inside changes.
Analysis
In the recent works, the environments in which the robots may navigate are supposed to be discrete (e.g. a grid) or continuous. In the discrete environments like Dixon et al., 16 a state is a snapshot of the grid which specifies the cells which contain some robots. Since the cells are geometrically fixed, and the precise locations of robots inside the cells are abstracted out, there is no need to prove that the definition of state is correctly defined. So, it is straight forward to define the corresponding next states for each state and to prove that all of the next states are always reachable based on the directions (in a grid a robot may pick one of the four possible directions) the robots choose to move.
In contrast to the discrete environments, in continuous domains, the robots may move continuously to any arbitrary location inside the environment (and are not forced to choose between some fixed locations for the next step of their movements), so there may exist some transitions that occur during the movement (leading to a chain of states). Since the resulting state space which is constructed based on robots’ actions is a discrete representation of a continuous environment, it is essential to prove that the notion of state is defined correctly. Precisely, consider s as the current state of the system. While the system is running, state s may be reached multiple times. The definition of state must be specified in such a way that all the successor states of s have the potential to be reached through s with respect to the robots’ actions.
In the following, we show that the definition of state is correct (Lemma 2). Further, we prove that the number of states with respect to an MRS is finite (Lemma 3).
Lemma 2
Assume an arbitrary state si in an
Proof outline
The main part of the state definition (Definition 5), which determines the validation of two atomic propositions Coverage and Connectivity, is
Lemma 3
The number of states regarding an
Proof outline
Consider an
Lemma 3 is provided only to show that the size of the state space is bounded, but in practice, the size of the state space can be reasonable with respect to MRS as shown in the next section.
Case studies
We have used Computational Geometry Algorithms Library
34
to implement the proposed method in C++.
35
The program automatically constructs the state space of the
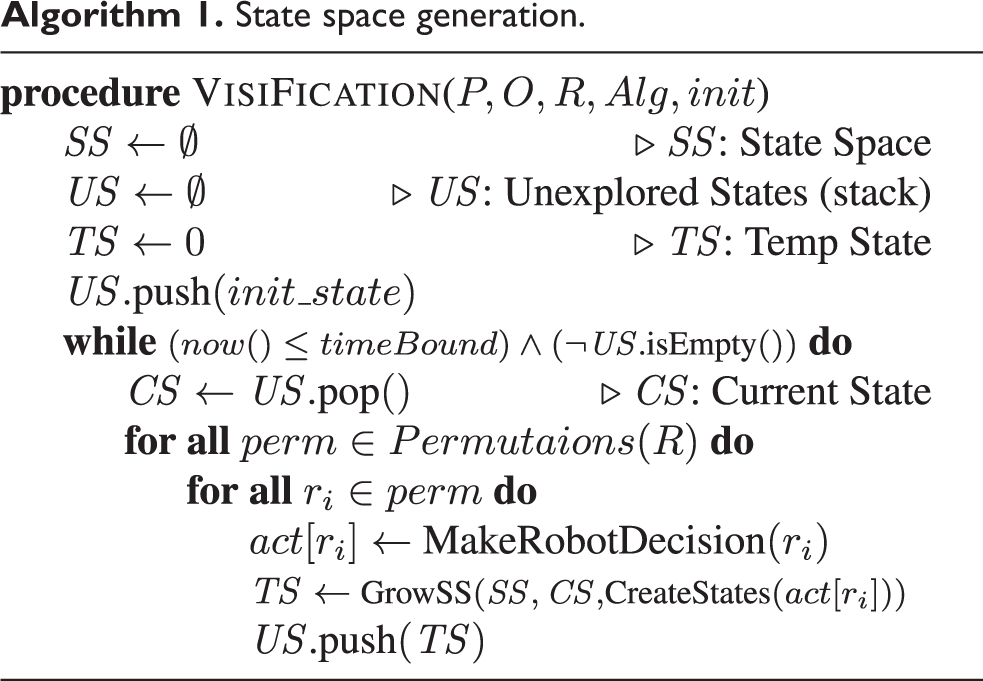
The pseudocode of the state space generation process is illustrated in Algorithm 1. At first, the initial state of the system is constructed (

We analyze the proposed method based on two factors, the number of generated states and the convergence time (minutes). The number of generated states shows how complex MRS is modeled, and the convergence time indicates that how long does it take for the state space generation algorithm to converge and does not generate any new state. Precisely, in order to obtain the convergence time, we let the state space generation algorithm run for a significant amount of time to be sure that no new state is generated.
In the following subsections, we discuss two case studies (1) robots move based on Alpha algorithm 36 within polygonal domains with some restrictions on their movements (e.g. robots are only allowed to choose from some fixed movement directions) and (2) robots move freely based on a decentralized swarm aggregation algorithm 21 within environments with obstacles. Our simulation environment is an Ubuntu 14.04 machine, Intel Pentium CPU 2.6 GHz with 4 GB RAM.
Constrained movement
As the first case study, we consider robot swarms algorithms in which the robots use only local wireless connectivity information to achieve swarm aggregation. Particularly, we use the simplest Alpha algorithm which is examined using simulations and real robot experiments of previous studies 16,36,37 , as the navigation algorithms of the robots in this simulation. The implemented Alpha algorithm focuses on maintaining the connectivity of the communication graph during the robots’ movements. Alpha algorithm performs based on the value of α which is given as a threshold number. For each robot, If the number of visible robots is above the value of α, it executes a random turn to avoid the swarm simply collapsing on itself, otherwise, it executes a 180° turn to avoid moving out of the swarm.
The environments used by Dixon et al. 16 is discretized by means of a grid which lets the robots only move in four directions (up, down, left, and right) with a fixed value of movement distance (robots move discretely). We constrained the possible movement directions of our proposed method (which has no limitations on the angle of directions and the value of movement distance) to the four directions with a fixed value of movement distance (robots move continuously with distance equal to one unit) in order to compare the number of generated states.
Table 1 analyzes our proposed state space generation algorithm with respect to the environments depicted in Figure 10. From the number of states (or convergence time) perspective, in Polygon (II), the ratio of the number of generated states when the number of robots is three (r1, r2, and r3) and four increases about twice in comparison with Polygon (I). So, as the geometry of the environment gets more complex, the number of robots plays an important role on the number of generated states.
Analysis of the generated state space for grid-constrained movements.

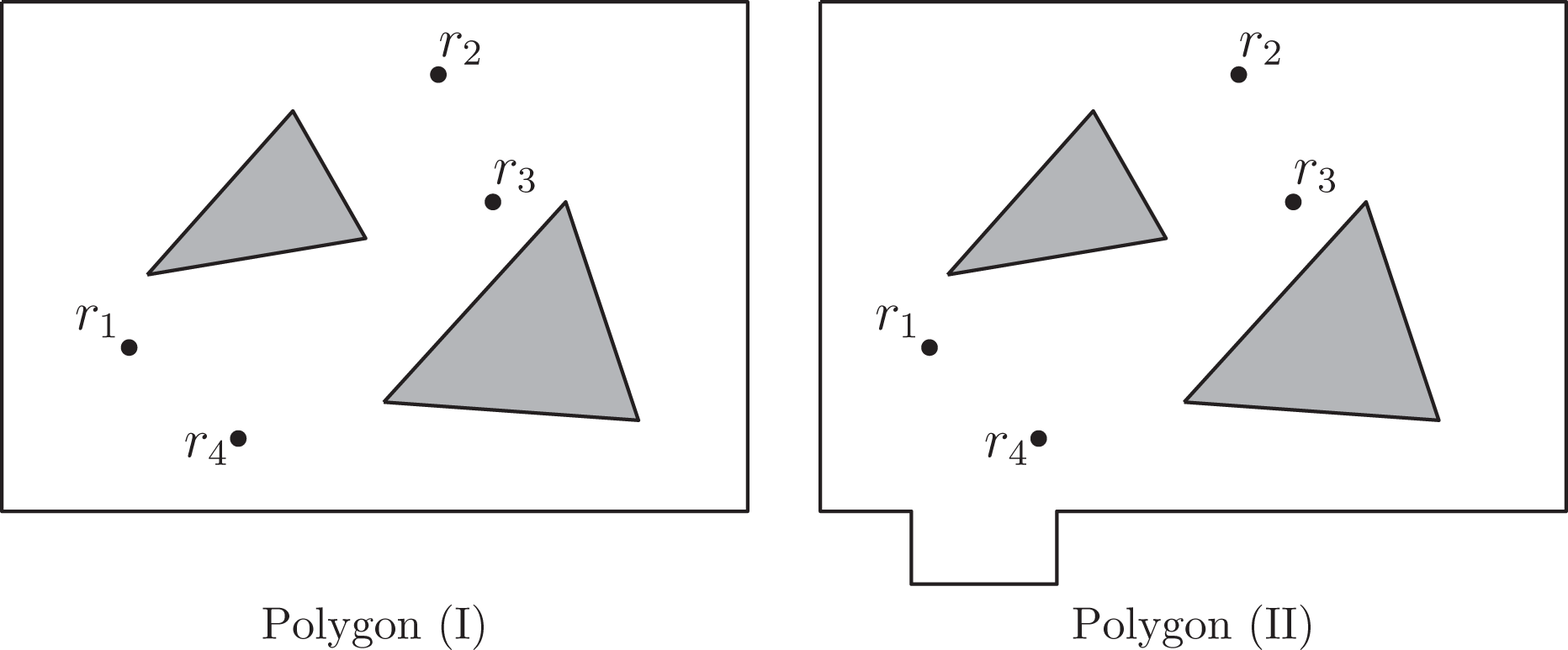
The polygon used for robots with grid-constrained movement.
Dixon et al. 16 implemented the Alpha algorithm for three robots (k = 3) within grid sizes of 5 × 5 and 6 × 6 and obtained 168 × 106 and 501 × 106 number of states, respectively. Even though they completely abstracted out the geometry of the environment, the number of states achieved is considerably greater than the number of states computed by our method which let the robots move continuously in a geometric domain with obstacles.
In the previous work,
20
the motion of robots was restricted to only move along simple paths inside a simple polygon (with no obstacles inside). We put some limitations on our proposed method and constrain the possible movement directions of robots to two (left and right) over a given path in order to analyze the complexity of the generated state space. Table 2 examines the two state space-generation algorithms with respect to Figure 11 (obtained from O’Rourke
5
) where each robot is only allowed to traverse the corresponding path. As expected, the number of states computed by Sheshkalani et al.
20
is fewer than the number of states achieved in this work. In the previous work, in addition to
Analysis of the generated state space for path-constrained movement.


The polygon used for robots with path-constrained movement. 5
Free movement
As the second case study, we consider a decentralized swarm aggregation algorithm based on local interactions for MRS with an integrated obstacle avoidance 21 in which robots can move freely inside environments with obstacles. Although they used the second smallest eigen value (e.g. the algebraic connectivity) of the Laplacian matrix of the robots’ communication graph in order to preserve the connectivity, they could not have any integration of a connectivity maintenance algorithm within the proposed control schema. So, further we show that how our proposed method can be applied to guarantee that the respecting property may be preserved during the robots’ movements. Their proposed algorithm was examined using simulations along with experimental results carried out with the SAETTA mobile robotic platform. We use the proposed aggregation control law 21 for each robot ri in our simulations as the navigation algorithm ai within the environments containing some obstacles.
Considering Figure 12, the convergence time of the proposed state space generation algorithm for polygons (IV) and (V) is 5.8 and 10.9 min, respectively. The reason for which the convergence time of Polygon (V) takes longer than Polygon (IV) is described as follows. As shown in Polygon (V), the robots are not visible to each other. So, at the beginning of the movement, each robot tries locally to find other robots in order to make the communication graph connected. This way, it takes more time for the robots to aggregate, and consequently maintain the connectivity in comparison with Polygon (IV), where the communication graph of robots is initially connected.
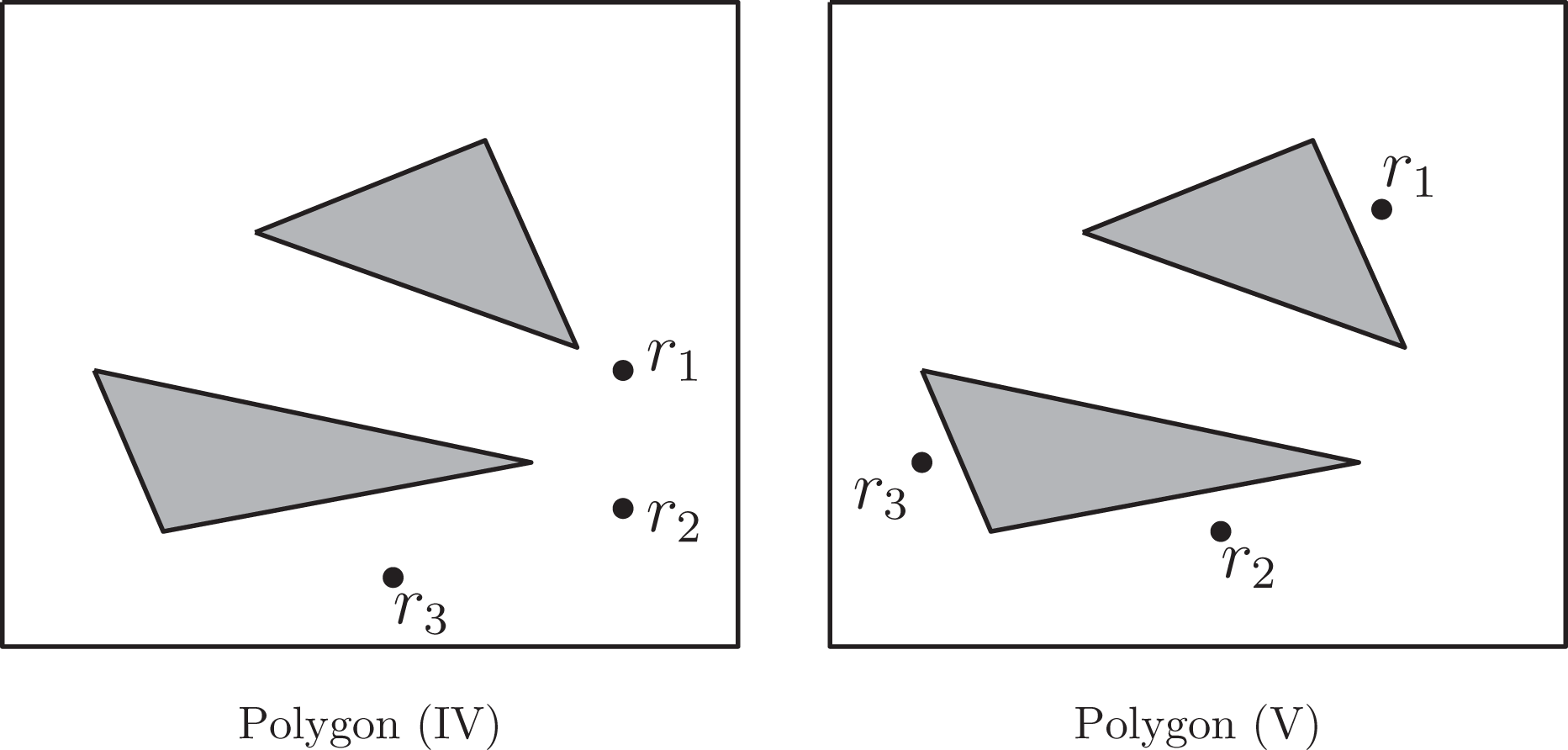
The polygons used for the robots with free movement.
We used the CADP
23
model-checker to verify the requirements (e.g. expressed in LTL
f
formulas) regarding the generated state space. CADP evaluates each formula in less than 2 s which shows the applicability of the proposed method. Since the state space is constructed based on the given MRS, the verification method has to be rerun upon changes to MRS (e.g. navigation algorithms or initial position of robots). Figure 13 depicts an overall view of the automated verification process of an MRS. Table 3 shows the results of the verification process with respect to the environments depicted in Figure 12 and the mentioned LTL
f
formulas. Recall that in the following, the LTL modalities □ and ⋄ are interpreted according to LTL
f
semantics. The first formula □Connectivity, which is a safety property, indicates whether the communication graph of the robots is connected until the end of the trace and never gets violated. The second formula ⋄□Connectivity, which may reveal an important feature of Leccese et al.,
21
is True; if eventually after some amount of time the robots become connected, and from then on, they always preserve the connectivity. The third formula ⋄Connectivity is True, if the robots are eventually connected which means that the communication graph does not always stay disconnected. According to LTL
f
semantics, the second formula (persistence property) is equivalent to say that the last point in the trace satisfies Connectivity, that is, it is equivalent to

The overall view of the automated verification process of an MRS. MRS: multi-robot system.
The results of the verification of two LTL f formulas for free movement.

LTL: linear temporal logic.
Consider the polygons of Figure 12. Based on the initial positions of robots in Polygon (IV), the corresponding communication graph is connected. As stated in Table 3, the formula □Connectivity is True, which means that the underlying aggregation control law always preserves the global connectivity during the robots’ movements. On the other hand, robots’ positions in Polygon (V) show that the communication graph of robots is not initially connected which makes the mentioned formula False. Although Connectivity property is violated at first, as time goes by, the robots try to find each other and obtain the connectivity with respect to the navigation algorithms. In contrast to □Connectivity, the formula ⋄□Connectivity is satisfied in regard to Polygon (V) which shows that the proposed aggregation control law 21 guarantees to maintain the connectivity as soon as the communication graph of robots becomes connected.
In the conclusions of Leccese et al. 21 work, it is mentioned that they will focus on the integration of a connectivity maintenance algorithm within the proposed control schema. To the best of our knowledge, no contribution has been published to address the mentioned issue yet. Using our method, they can guarantee that the communication graph of robots is connected during the robots’ movements regarding the MRS and the desired LTL f formula.
Conclusions
We presented a method to construct a discrete state space for an MRS and then verify the correctness properties by means of model-checking techniques. The notion of state has been defined in such a way that each state can be uniquely labeled with the atomic propositions Connectivity and Coverage. An important aspect of our method is that it treats the navigation algorithms as black boxes. Iteratively searching for new states, at each step, our algorithm asks the black box for its next action and creates the states caused by the action based on a precise definition of transitions. Using our provided implementation, the modeler can code the navigation algorithms and generate the state space. The generated state space is used to verify temporal formulas constructed over the mentioned propositions using the CADP tool. An important benefit of this approach is to eliminate the need for analytical proof of correctness upon changes to the navigation algorithms.
Since the robots’ initial positions have an influence on the verification results, it would be beneficial to suggest some specific regions of the environment as the possible robots’ initial positions have the potential to make the given temporal formulas satisfied. Future work will be focused on adding a preprocessing phase that subdivides the environment with respect to the formulas and let the modeler choose the initial positions from the suggested regions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.