
Abstract
Due to costly space projects, affordable flight models and test prototypes are of incomparable importance in academic and research applications, for example, data acquisition and subsystems testing. In this regard, CanSat could be used as a low-cost, high-tech, and lightweight model. CanSat carrier launch system is a simple second-order aerospace system. Aerospace systems require the highest level of effective controller performance. Adding second-order integral and second-order derivative terms to proportional–integral–derivative controller leads to the elimination of steady-state errors and yields to a faster systems convergence. Moreover, sliding mode control is considered as a robust controller that has appropriate features to track. Thus, this article tends to present an adaptive hybrid of higher order proportional–integral–derivative and sliding mode control optimized by multi-objective genetic algorithm to control a CanSat carrier launch system.
Keywords
Introduction
CanSat, a similar technology used in miniaturized satellites, is a type of autonomous space technology that is employed for research and educational purposes. In this regard, CanSat can be considered as an intelligent space robot. Carrier systems are used to carry CanSats to a certain altitude where they are released afterward. The carrier system, which has a vertical takeoff, releases the CanSat in a predefined altitude with a certain path angle relative to the local horizon. Then, the parachute is opened for a safe landing. In this regard, in order to launch the CanSat payload to a certain flight altitude, designing the CanSat controller is one of the key issues.
Proportional–integral–derivative (PID) controller is the most common controller in feedback loops and has been used in most recent control processes. 1 Determining three control parameters, proportional (KP ), integral (KI ), and derivative (KD ) gains, is the main concern in the design of PID controllers. In order to specify these control gains, Kosari et al. used the Gaussian and triangular fuzzy membership functions to design fuzzy PID controllers for a CanSat carrier launch system. 2 They have implemented the genetic algorithm (GA) to optimize fuzzy parameters. Although the fuzzy controller can cover a number of uncertainties, the design of an adaptive controller, which can provide an appropriate response to unknown uncertainties and disturbances, is essential. In order to increase the performance of the control system, hybrid controllers such as PID control and fuzzy control, 3 –7 sliding mode control (SMC) and fuzzy control, 8 –11 SMC and H2/H∞ control, 12 –16 and SMC and PID control 17 –21 have been used abundantly by researchers. Although the PID controller has higher reliability and stability compared to SMC, SMC can achieve better tracking performance and robustness to the disturbances. 22 , 23 In order to benefit from the advantages of both PID controller and SMC, a combination of these controllers is used. Zhang et al. proposed a hybrid of PID control and SMC and demonstrated that the suggested controller has better stable precision than each controller is implemented separately. 24 Li et al. combined backstepping kinematic control and PID sliding mode dynamic control to control nonholonomic mobile robots using an adaptive neural network gain of SMC. 25 In order to guarantee the static and dynamic system performance, Zhang et al. proposed a control method based on neuron PID and sliding mode. 26 Besides, in order to increase the efficiency of the PID controller, fractional calculus has been discussed. 27 –29 Taking into account unknown models, the fractional order PID controller with the non-integer gains’ order 30 has a more robust performance compared to PID controller. 31 On the other side, adding second-order derivative and integral terms to the PID controller leads to enhancement of the systems’ performance and robustness with considering existing uncertainties. 32 Therefore, in order to control the chaotic behavior of chaotic systems such as pendulum-driven spherical robot, 33 using the second-order integral and derivative terms can improve the performance of the control system.
The parameters of the controllers have to be determined using an appropriate optimization approach. To choose these parameters effectively, the evolutionary algorithms, 34 such as the GA, 35 are employed.
The main contribution of this article is to propose novel adaptive proportional plus first- and second-order derivative and integral (PI2D, PID2, PIDD2, PI2ID, and PI2IDD2) controllers for the CanSat carrier launch system as a simple model of a second-order system. The gains of designed higher order controllers are tuned by a sliding mode–based adaptation mechanism in which a gradient search algorithm with opposite direction of energy flow is implemented. The learning rates of adaption laws are considered as design variables and optimized with the GA. Finally, the performance of the designed controllers is compared with each other.
The rest of this article is organized as follows. A complete description of the mathematical model of the CanSat carrier launch system is presented in the second section. In the third section, the higher order control algorithm is discussed. Adaptation laws and optimization process are demonstrated in this section. In the fourth section, simulation results are presented and a detailed and comprehensive discussion is made on them, followed by conclusion in the last section.
Dynamic modeling
The governing dynamic equations of a CanSat carrier launch system are derived from the Newtonian method along with the rule that in the separation stage, the projection of satellite velocity vector must be tangent to the horizontal plane. Figure 1 shows a simplified model of a launch vehicle in which θ is the angle of the longitudinal vector of the vehicle in the perpendicular direction (toward the ground) and Φ is the angle of the thrust vector with body centerline. The dynamics of the system can be summarized as follows

in which

in which l represents the length of the vehicle, F shows the propulsion force, and Fn is the projection perpendicular to the longitudinal direction of the launch vehicle. It is known that the vehicle moves along the vertical axis with acceleration of a. Therefore, Newton equation for the vertical axis is derived as follows

where

Meanwhile, geometric relations dictate the following equations in the vertical plane



Carrier system scheme.
By substituting equation (6) in equation (4), we have the following equation

In the same way, by substituting equation (5) in equation (2), we have the following equation

Considering

By substituting

in which

where

By replacing equation (12) in equation (11), it would be as follows

It can be concluded from equation (13) that
Higher order controllers design
The PI2IDD2, PI2ID, PIDD2, PID2, and PI2D controllers with input



where KP
is proportional gain, TI is the integral time constant,





where
Adaptive rules
In order to update the gains of the designed higher order controllers, an adaption law is implemented. The adaptation law takes advantage of sliding mode concepts and is designed based on the gradient search method. Here, for example, adaptive PI2IDD2 is presented and other controllers are obtained in the same way. To provide proper tuning laws for updating control gains, the designing signal xr is defined in the following form

where

If the sliding mode occurs, that is,

By investigating equation (26), it can be concluded that if t tends to infinity, then

By this, the condition of sliding mode includes

Equation (28) ensures that

From the multiplication of both sides of the abovementioned equation in S, the following equation is obtained

Using gradient method and the chain rule, equation (19), as well as equation (30), the adaptive laws are calculated for control gains of





in which
Figure 2 represents the block diagram of the adaptive higher order controllers for the CanSat carrier launch system.

Block diagram of adaptive higher order controllers for the CanSat carrier launch system. MOGA: multi-objective genetic algorithm.
Optimization
In this article, multi-objective GA (MOGA) optimization is utilized as a stochastic search algorithm that imitates the process of evolution primarily based on Darwin’s survival-of-the-fittest approach to obtain the optimal values of the controllers’ parameters. In GA optimization, a population of candidate solutions called individual are evolved into superior solutions. Indeed, the population is evaluated and the best solutions are selected to reproduce and mate to create the next generation. After a number of generations, elite individuals lead the population and increase the quality of solutions. A straightforward GA involves new individual selection from population based on the fitness, crossover, and mutation regarding a number of probabilities to produce new individuals.
In this article, the value set of GA operators is set in Table 1. Learning rates are considered as design variables in the optimization process of the proposed controllers. Furthermore, the system’s diversion from equilibrium state and the system’s thrust vector deviation are represented by OF1 and OF2, respectively. These objective functions can be written as follows


Genetic algorithm configuration parameters.

Results and discussion
The results obtained from applying the proposed controllers on the CanSat carrier launch system indicate the effective performance of the higher order controllers. The parameters used in the dynamic model of equation (9) are as follows:
For each controller, the best point among all the output points of GA from the viewpoints of two objective functions is selected as optimum design point. Table 2 shows the design variables related to the optimum design point. Additionally, the values of corresponding objective functions have been represented in Table 3.
Design variables of the optimum design point for higher order controllers.

Objective functions of the optimum design point for higher order controllers.

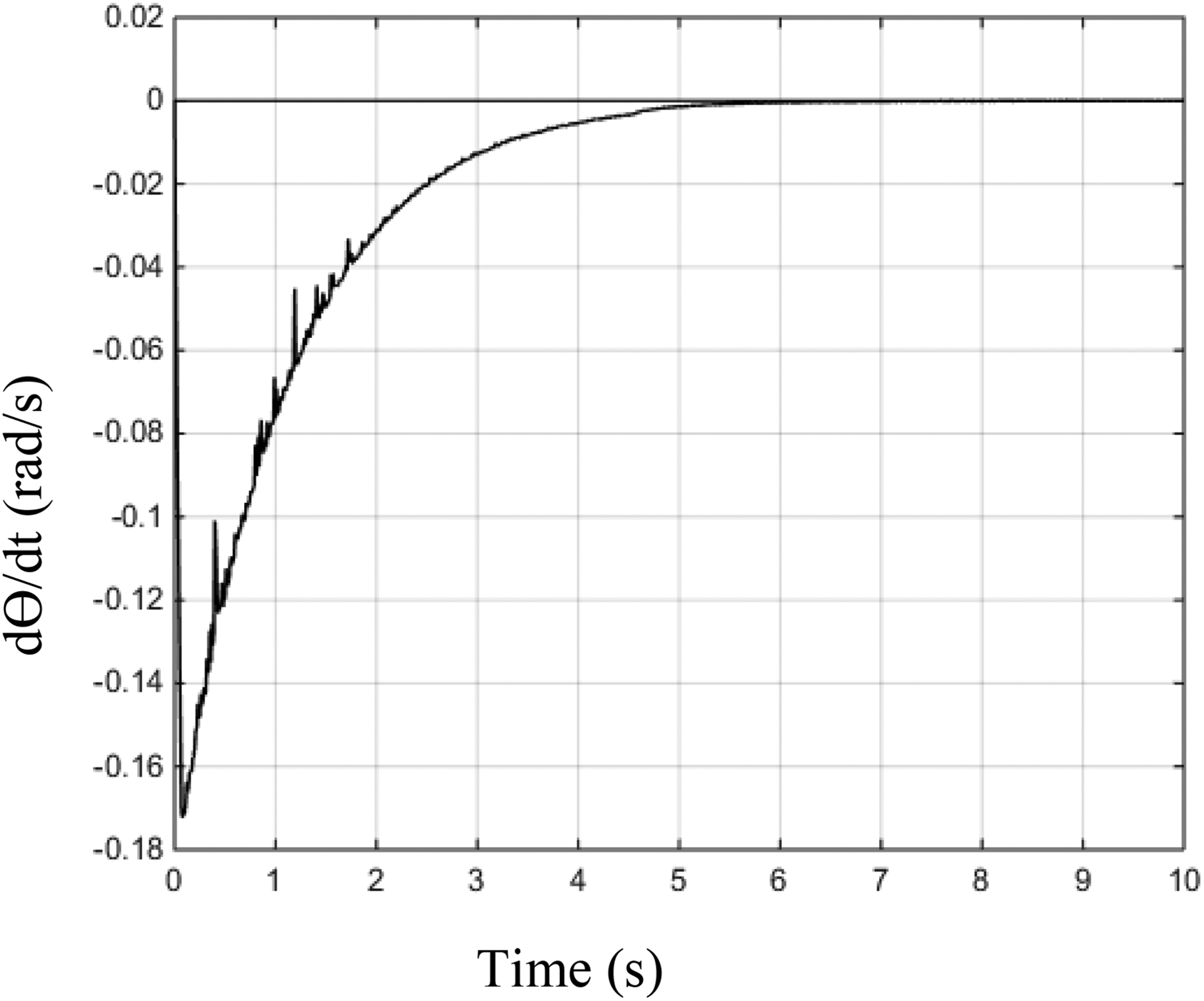
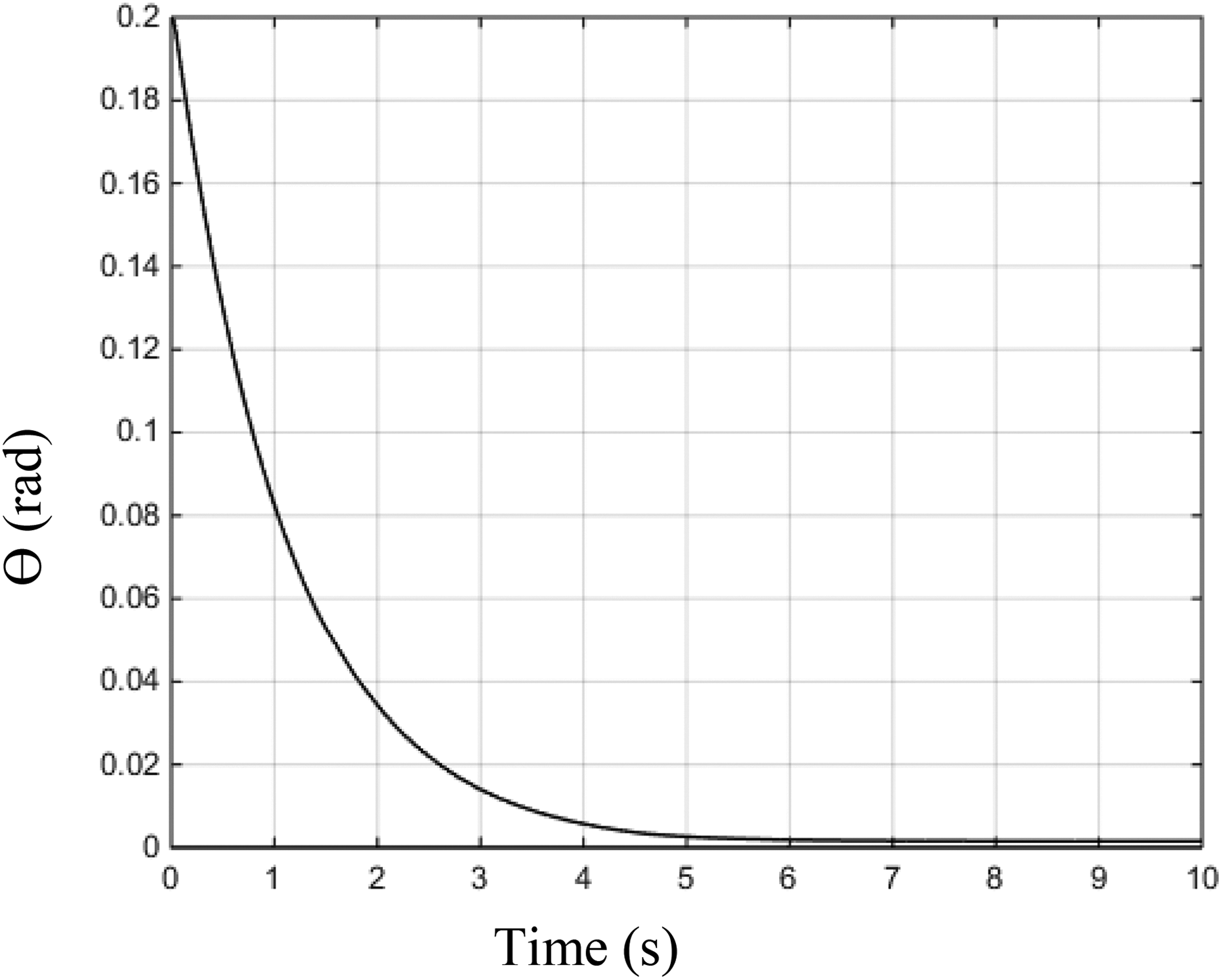
Figures 3 and 4 represent the angular position and angular velocity of the CanSat carrier launch system under performance of the PI2IDD2 controller, respectively. Additionally, the angular position of the CanSat carrier launch system under performance of the PI2ID, PIDD2, PID2, and PI2D controllers is shown in Figures 5
to 8, respectively. Also, the angular velocity of the CanSat carrier launch system under performance of the PI2ID, PIDD2, PID2, and PI2D controllers is illustrated in Figures 9
to 12, respectively. As it can be seen from the figures, the designed controllers reach the desired state. Figure 13 shows the time response of the angular position of CanSat carrier launch system thrust vector under performance of the PI2IDD2 controller. Besides, Figures 14
to 17 represent the time response of CanSat carrier launch system thrust vector under performance of the PI2ID, PIDD2, PID2, and PI2D controllers, respectively. Regarding the theory of sliding modes, if the sliding condition is satisfied, according to equations (31) to (35), the time derivative of PI2IDD2 gains will be zero and the changes in

Time response of the angular position of the CanSat carrier launch system under performance of the adaptive PI2IDD2 controller.
Time response of the angular velocity of the CanSat carrier launch system under performance of the adaptive PI2IDD2 controller.

Time response of the angular position of the CanSat carrier launch system under performance of the adaptive PI2ID controller.

Time response of the angular position of the CanSat carrier launch system under performance of the adaptive PIDD2 controller.

Time response of the angular position of the CanSat carrier launch system under performance of the adaptive PID2 controller.
Time response of the angular position of the CanSat carrier launch system under performance of the adaptive PI2D controller.

Time response of the angular velocity of the CanSat carrier launch system under performance of the adaptive PI2ID controller.

Time response of the angular velocity of the CanSat carrier launch system under performance of the adaptive PIDD2 controller.

Time response of the angular velocity of the CanSat carrier launch system under performance of the adaptive PID2 controller.

Time response of the angular velocity of the CanSat carrier launch system under performance of the adaptive PI2D controller.

Time response of the angular position of CanSat carrier launch system thrust vector under performance of the adaptive PI2IDD2 controller.

Time response of the angular position of CanSat carrier launch system thrust vector under performance of the adaptive PI2ID controller.

Time response of the angular position of CanSat carrier launch system thrust vector under performance of the adaptive PIDD2 controller.

Time response of the angular position of CanSat carrier launch system thrust vector under performance of the adaptive PID2 controller.

Time response of the angular position of CanSat carrier launch system thrust vector under performance of the adaptive PI2D controller.

Time response of the control gains of the adaptive PI2IDD2 controller.

Time response of the control gains of the adaptive PI2ID controller.

Time response of the control gains of the adaptive PIDD2 controller.

Time response of the control gains of the adaptive PID2 controller.
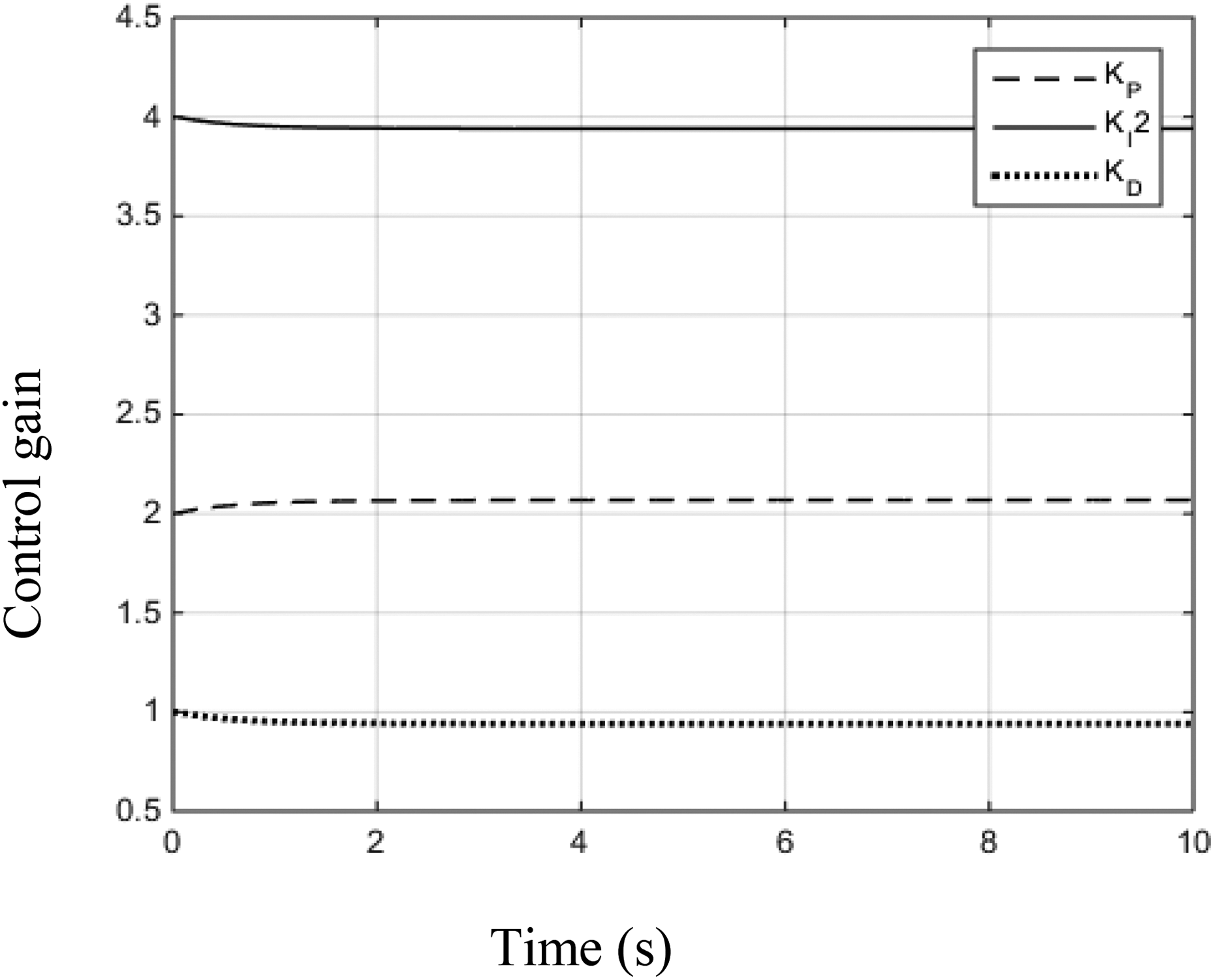
Time response of the control gains of the adaptive PI2D controller.
Figures 3 and 5 to 8, which represent the time response of the angular position of the CanSat carrier launch system under performance of higher order controllers, indicate the high efficiency of these controllers. All of the controllers properly control the system in about 5 s. In addition, comparison of Figures 4 and 9 to 12, which represent the angular velocity of the CanSat carrier launch system under performance of PI2IDD2, PI2ID, PIDD2, PID2, and PI2D, shows that the system has higher stability under performance of PI2ID and PI2D controllers. So, the time response of the system under performance of these two controllers has the least instability and chattering.
As it can be seen in Figures 13 to 17, it can be found that PI2IDD2 and PIDD2 are not recommended due to their high control efforts, while PI2ID, PID2, and PI2D controllers seem to be more cost-effective. All in all, the PID2 controller can be recommended as a proper controller due to its optimum control effort and higher stability.
Conclusion
In this article, adaptive higher order controllers have been implemented on the CanSat carrier launch system optimized with GA. Choosing proper Lyapunov function and initial values of control gains was the first steps of controllers’ design. Furthermore, the control gains were adapted with the aid of an adequate adaptation mechanism. By choosing the system’s diversion from the equilibrium state and the system’s thrust vector deviation as the objective functions, the GA was implemented to achieve the optimal control conditions. The results confirmed that the optimal adaptive PID2 controller has the best control performance compared to other controllers for a second-order dynamical system. As a future suggestion, in order to improve the output response of the system, it is essential to update control gains by fuzzy logic.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.