
Abstract
In high-altitude, long-endurance unmanned aerial vehicles, a celestial attitude determination system is used to enhance the inertial navigation system (INS)/global positioning system (GPS) to achieve the required attitude performance. The traditional federal filter is not applicable for INS/GPS/celestial attitude determination system information fusion because it does not consider the mutually coupled relationship between the horizontal reference error in the celestial attitude determination system and the navigation error; this limitation results in reduced navigation accuracy. This article proposes a novel stepwise fusion algorithm with dual correction for multi-sensor navigation. Considering the horizontal reference error, the celestial attitude determination system measurement model is constructed and the issues involved in applying the federal filter are discussed. Then, preliminary error estimation and horizontal reference compensation are added to the navigation architecture. In addition, a sequential update strategy is derived to estimate the attitude error with the compensated celestial attitude determination system based on the preliminary estimation. A stepwise correction filtering algorithm with interactive preliminary and sequential updates that can effectively fuse celestial attitude determination system measurements with the INS/GPS is constructed. High-altitude, long-endurance unmanned aerial vehicle navigation in a remote sensing task is simulated to verify the performance of the proposed method. The simulation results demonstrate that the horizontal reference error is effectively compensated, and the attitude accuracy is significantly improved after stepwise error estimation and correction. The proposed method also provides a novel multi-sensor integrated navigation architecture with mutually coupled errors; this architecture is beneficial in unmanned aerial vehicle navigation applications.
Keywords
Introduction
In recent years, high-altitude, long-endurance unmanned aerial vehicles (HALE-UAVs) have shown great value in military and civilian applications. The accuracy and steadiness of HALE-UAV attitude measurement are particularly important in remote sensing or reconnaissance. 1 The standard global positioning system (GPS)-aided inertial navigation system (INS) cannot provide an adequate attitude performance. In this situation, a celestial attitude determination system (CADS) can be added to improve the INS/GPS navigation system. By observing stars with high precision, the CADS can determine the vehicle attitude based on a horizontal reference. 2,3
Appropriate multi-sensor integration architectures are needed to fuse information from the CADS with INS and GPS. The error in the horizontal reference is the main factor influencing attitude accuracy of CADS in application of UAV navigation. The attitude for UAV navigation should reflect the geometry of the UAV body in the local-horizontal geographic coordinate frame. By analyzing the starlights’ observed direction using airborne star sensor in the UAV body coordinate frame and its defined direction retrieved from the ephemeris in the inertial coordinate frame, the geometry of the UAV body in the inertial coordinate frame is obtained. On this basis, the horizontal reference is used to obtain the needed attitude in the local-horizontal geographic coordinate frame.
Thus, there are three factors that may introduce errors in attitude determination of CADS: the measurement noise of star sensor, the inaccuracy of ephemeris, and the errors of horizontal reference. The ephemeris usually obtained from long-term observation and correction of astronomical observatory, whose precision could reach sub-arc-second level. 4 The noise of star sensor in observing the starlight vector is usually several arc-seconds. 5 The horizontal reference, which provided by INS or inclinometer quipped on UAV, usually with an error of dens of arc-seconds or even reach arc-minutes. 6 Among the abovementioned three factors, the error of the horizontal reference has the most significant influence on the attitude accuracy of CADS when applied in UAV navigation. The attitude accuracy will degrade if the horizontal reference is used without error compensation. So compensation of the horizontal reference error must be considered in the INS/GPS/CADS integrated navigation.
Several fusion algorithms have been used for multi-sensor navigation; in particular, the federal filter (FF) has been widely used. The INS and GPS receivers are usually integrated as one system, in which a Kalman filter (KF) for INS/GPS fusion is already embedded. 7,8 To compose the INS/GPS/CADS integrated navigation system, another filter for fusing the measurements of CADS is needed. The FF, whose framework constituted by several paralleled sub-filters and a global fusion filter, provides a choice for fusion algorithm design of the INS/GPS/CADS integrated navigation system. In this traditional architecture, INS is integrated with additional sensors (e.g. GPS or CADS) to perform local estimation separately and then fused to perform global optimal estimation. 9 –11 To achieve optimal performance of the FF framework, the assistant sensors needed to be work independently. 12 However, this condition is not satisfied for the INS/GPS/CADS integration because the horizontal reference provided by INS is adopted, resulting in degradation of navigation accuracy. The motivation of proposing the improved algorithm is overcoming the shortage of FF above.
Aside from the FF, information fusion methods and architectures for multi-sensor navigation systems are also an active area of research. Heterogeneous multi-sensor navigation was reviewed by Zhou et al. 13 A multilevel optimizing distributed filtering method was used for the autonomous navigation of multi-UAV systems. 14 An interactive multiple model strategy for distributed fusion was used to fuse sensor networks. 15 Information from pseudo-observations was used to compensate the multi-sensor FF with a nonidentity structure. 16 A compensation method using the covariance matrix precision loss of the local filter was proposed to improve the synthetic aperture radar (SAR)/terrain reference navigation (TRN)/GPS/INS FF. 17 However, the fusion algorithms above are more suitable for the independent sensors to achieve optimal error estimation, and any error component is not corrected until all of them be estimated. The shortcoming of these algorithms lie in that their estimation accuracy easily influenced by coupled sensors, in which error components are need to be corrected partly for decoupling during estimation process. So general methods that focus on improving the estimation performance of the filter are inadequate for INS/GPS/CADS integration, because the mutually coupled relationship between the horizontal reference error in CADS and the navigation error is not considered, resulting in reduced navigation accuracy.
For the situation that horizontal reference of CADS coupled with INS, this article proposes a novel stepwise fusion algorithm with dual correction (SF-DC) for multi-sensor navigation. Taking the influence of horizontal reference into consideration, 18 the error estimation and correction are executed interactively for INS/GPS/CADS integration. The horizontal reference can be compensated for in the first filtering step, thus improving the accuracy of the CADS. Then, the INS can be augmented by the CADS to provide higher accuracy in the second filtering step.
The follow-up content of this article is organized as follows. In the second section, the coupled horizontal error in the CADS is modeled and the shortcoming of traditional navigation architecture using FF is analyzed. Then, on the basis of scheme design and modeling for INS/GPS/CADS integration, an improved stepwise fusion algorithm is proposed in the third section, in which a dual correction strategy including horizontal error correction and navigation error correction is adopted during the fusion process. Finally, simulations are carried out in the fourth section to verify the proposed method.
Problem statements
In this section, the coupled horizontal reference error of the CADS is modeled. Then, the influence of the horizontal reference on the CADS and the limitations encountered when applying a traditional FF to INS/GPS/CADS integration are discussed.
Model of coupled horizontal error in the CADS
By observing starlight in its field of view, the CADS obtains a direction vector relative to the aircraft body. The transform matrix from body frame (b) to inertial frame (i),
Because the attitude is described in the local horizontal frame (n) for UAV navigation, transformations between coordinate frames are needed, as shown in the following equation

where the superscript e denotes the earth-centered-earth-fixed coordinates.
Two matrices are used in this transformation: the Greenwich apparent sidereal time (GAST) matrix, expressed by equation (2), and the horizontal reference transform matrix, 20 expressed by equation (3)


where (λ, L) are the latitude and longitude of the UAV, respectively.
Equation (1) provides the basic model of CADS attitude determination without considering errors. Considering the noise of starlight observations, we have

where vS represents the measurement noise vector of starlight observations.
Moreover, because the latitude and longitude are provided by the INS, the horizontal reference transformation matrix is calculated as

The INS errors contained in (λI , LI ) are introduced into the horizontal reference.
Considering the error sources in equations (4) and (5), the attitude matrix provided by CADS can be represented as

The influence of errors on the attitude matrix of the CADS can be analyzed through equation (6). The horizontal error, which increases with the growth of INS errors, is a more influential factor than the starlight observation noise, which has a range within several arc-seconds.
Traditional navigation architecture using the FF
In the “estimation-correction” strategy, the first stage is INS error state estimation. For the FF, the GPS and CADS measurements were used to provide local updates in parallel and then fused into a global update to obtain the optimal estimates of the INS error states. The FF equations are shown in equations (7) to (12).
Prediction


where
Local update (i)



where the superscript (i) denotes corresponding parameters of the ith sub-filter;
Global update

In Figure 1, local update 1 and local update 2 are independent. Using GPS measurements, local update 1 mainly contributes to the estimation of position and velocity errors. In contrast, local update 2 uses measurements from the CADS and mainly contributes to attitude performance. In an INS/GPS/CADS integrated navigation system using an FF, the CADS utilizes uncorrected measurements provided by the INS to obtain the horizontal reference directly. This approach results in reduced accuracy based on equation (6). Furthermore, the accuracy degradation of CADS will affect the estimation accuracy of local update 2 as well as the global update.
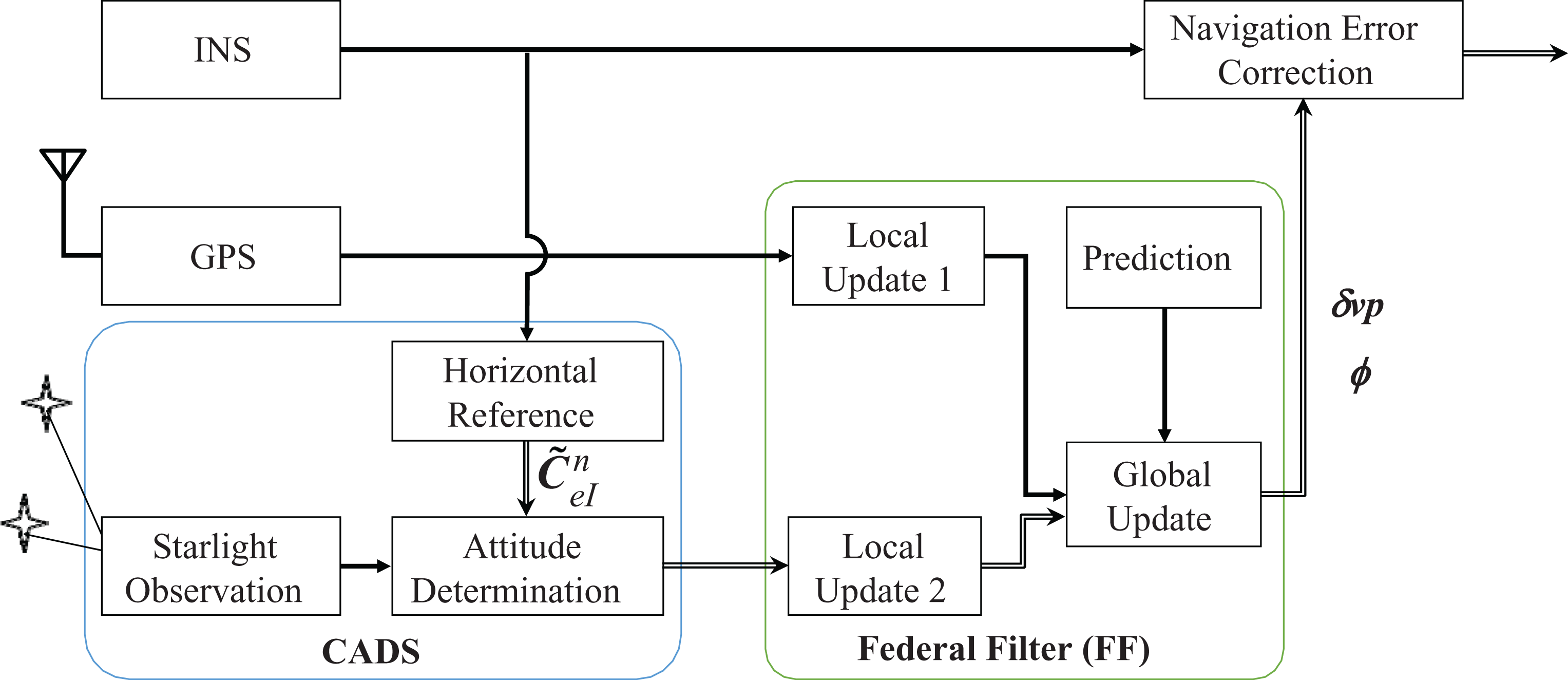
System architecture using the traditional FF. FF: federal filter.
Consequently, the accuracy will be improved if the horizontal reference error can be estimated and compensated before it is used by local update 2. However, this approach is not feasible when using the FF because error correction can only be processed after estimation. 10 Thus, a new strategy that considers the process of error estimation and correction comprehensively must be developed.
Stepwise fusion algorithm with dual correction
Stepwise fusion scheme design
As noted above, the accuracy of the horizontal reference is the major factor influencing the accuracy of the CADS measurement and must be compensated for before update 2. To achieve this goal, a novel SF-DC for multi-sensor navigation has been designed, as shown in Figure 2.

System architecture using the SF-DC. SF-DC: stepwise fusion algorithm with dual correction.
In Figure 3, the two update processes run sequentially; this approach differs from the FF shown in Figure 2. In the proposed structure, the horizontal error is estimated in step update 1. Then, the coupled horizontal error in the CADS can be compensated, and the attitude matrix

Filtering update process of the stepwise fusion algorithm.
Model for INS/GPS/CADS fusion navigation
INS/CADS integration model
In this section, the model for INS/CADS integration is presented. The attitude matrix provided by CADS can be represented as the following form

where
As the basic navigation unit of a UAV, the INS calculates the attitude, velocity, and position from gyroscope and accelerometer measurements.
Due to misalignment caused by INS error, the actual attitude matrix is

where ϕ is the misalignment angle vector.
A comparison of equations (13) with (14) illustrates that the measurement model for INS/CADS integration can be constructed using the difference between the attitude matrices provided by the INS and CADS, as shown in the following equation

Set Θ as

Then, select the INS errors as the system states

where
The system equation is the error model of the INS, 21 given by

where
Considering that equation (16) contains INS and CADS errors, based on the characteristics of the antisymmetric matrix, 22 the measurement model for INS/CADS integration is

where

where

The INS/CADS integration model can directly observe attitude error in states.
INS/GPS integration model
The GPS and INS are integrated in a loose-coupled mode, which uses the GPS position and velocity measurements. The measurement equation is 23

where
Stepwise fusion algorithm
The KF provides the theoretical basis for the decentralized filtering algorithm. In a KF, the estimated state


where
According to equations (23) and (24), the KF can be transformed into a sequential update form as follows
Prediction


Update 1



Update 2



The predicted states are corrected based on the GPS measurement during update 1 and further corrected based on the CADS measurement during update 2. Analysis of the INS/CADS integration model in equations (20) and (21) indicates that the observed attitude and gyroscope drift errors are accurate, whereas the position, velocity, and accelerometer zero-bias errors cannot be easily observed. Considering that the INS/CADS integration of update 2 contributes only slightly to the position, velocity, and accelerometer zero-bias errors, a dimension-reduced model is adopted. The state vector and covariance matrix is decomposed as follows


The dimension-reduced state vector and covariance matrix then becomes


and update 2 can be converted to update 2*



In the stage of prediction, updates 1 and 2* constitute the output of the reduced dimension sequential updated filter. The filtering process is shown in Figure 3.
As shown in Figure 3, the position and velocity error estimates are only updated once because they are observed by GPS directly and accurately. The accelerometer zero-bias error is also only updated once because it is strongly correlated with position and velocity. The attitude and gyroscope drift error estimates are updated twice: Update 1 obtains preliminary estimates from indirect GPS observations and update 2* obtains a final estimate using direct observations from the CADS. Therefore, high-precision attitude measurements from the CADS are essential to achieve an accurate estimation in update 2*.
Dual correction strategy
The dual correction strategy designed for the stepwise fusion algorithm contains two steps, horizontal error compensation and navigation error correction, as detailed subsequently.
Horizontal error correction
As shown in equation (5), the horizontal error influences the CADS through the horizontal reference transform matrix

where
Because the position errors have been estimated in update 1, δ

Due to the compensation of the horizontal reference error, high-accuracy attitude observation is provided to update 2*.
Navigation error correction
After horizontal reference correction, the INS attitude error can be accurately estimated during update 2* based on the preliminary estimate determined during update 1. The navigation errors, including the position and velocity errors estimated in update 1 and the attitude error estimated in update 2*, are used to correct the output of the INS. A high-accuracy navigation result is obtained, particularly regarding the measured attitude, which was the main concern.
The dimension-reduced sequential update method and stepwise correction strategy can be used concurrently. These two components constitute the novel SF-DC for multi-sensor navigation.
Simulation and analysis
Simulation description
The stepwise correction filtering algorithm was described in the previous section. In this section, the performance of the algorithm is analyzed.
The execution of an HALE-UAV remote sensing task was considered in the simulation. The initial longitude, latitude, and altitude of the HALE-UAV are 110.2°, 19.5°, and 500 m, respectively. The flight trajectory consists of several different flight conditions, such as take-off, climbing, varying speed, horizontal flying, and turning, as shown in Figure 4.

Flight trajectory of an UAV executing a remote sensing task. UAV: unmanned aerial vehicle.
The parameters of the INS and GPS are as follows: The drift of the gyroscope is constant at 1° h−1, the correlation time of the first-order Markov process for the gyroscope is 200 s, the constant zero-bias of the accelerometer is 5 × 10−4 g, and the correlation time of the first-order Markov process for the acceleration is 100 s. The horizontal position measuring accuracy of the GPS is 10 m, and the velocity measurement accuracy of the GPS is 0.2 m s−1. The starlight observation noise of the CADS is set to 10 arc-seconds. 23,24
The update frequency of the INS is 50 Hz, whereas the update frequencies of the GPS and CADS are both 1 Hz. The filtering update frequency is 1 Hz. The initial conditions of the filter were set as shown in Table 1, which set according to the error magnitude of INS initial alignment. It should be note that the FF and the stepwise fusion algorithm are both proposed based on the KF theory. According to the KF theory, the KF will converge to its optimal value, which not affected by the initial conditions for a controllable and observable system. 25
Initial filter conditions.

Simulation results and analysis
Using the simulation results, the performance of the stepwise correction filtering algorithm for INS/GPS/CADS integrated navigation was analyzed, and comparisons with the traditional FF were performed to verify the effectiveness of the algorithm.
First, covariance analyses without and with CADS augmenting the INS/GPS system were conducted to evaluate the filter estimation performance. The filtering covariance values of the gyroscope errors and accelerometer errors are shown in Figure 5.

Filtering covariance of the gyroscope and accelerometer errors. (a) Gyro constant drift, (b) gyroscope first-order Markov drift, and (c) accelerometer zero-bias.
A comparison of the covariance curves in Figure 5 illustrates that the filter can obtain better convergence and stability with regard to gyroscope and accelerometer error estimation with the augmentation of the CADS, indicating the potential for improving attitude performance. The states of gyro and accelerometer are indirect observable and their observability depends on the type of measurements provided for fusion with INS. 26 Without CADS assistance, the observability states of gyro and accelerometer are poor so the converge of covariance is slow. The adding of CADS improves the observability of error states significantly, so the covariance of the error states could converge to steady state more quickly and smoothly.
Second, the effect of horizontal reference compensation in the proposed algorithm is validated. According to the INS/CADS integration model of equation (19), the observation of INS/CADS integration is related to the state components of attitude misalignment angles and has no direct relationship with the state components of velocity errors. The attitude accuracy is analyzed with emphasis in simulation, since the varying speed of the UAV on simulation results is not significant. The error in the angle between the true value of the attitude matrix and CADS was used to evaluate the accuracy of CADS based on the definition
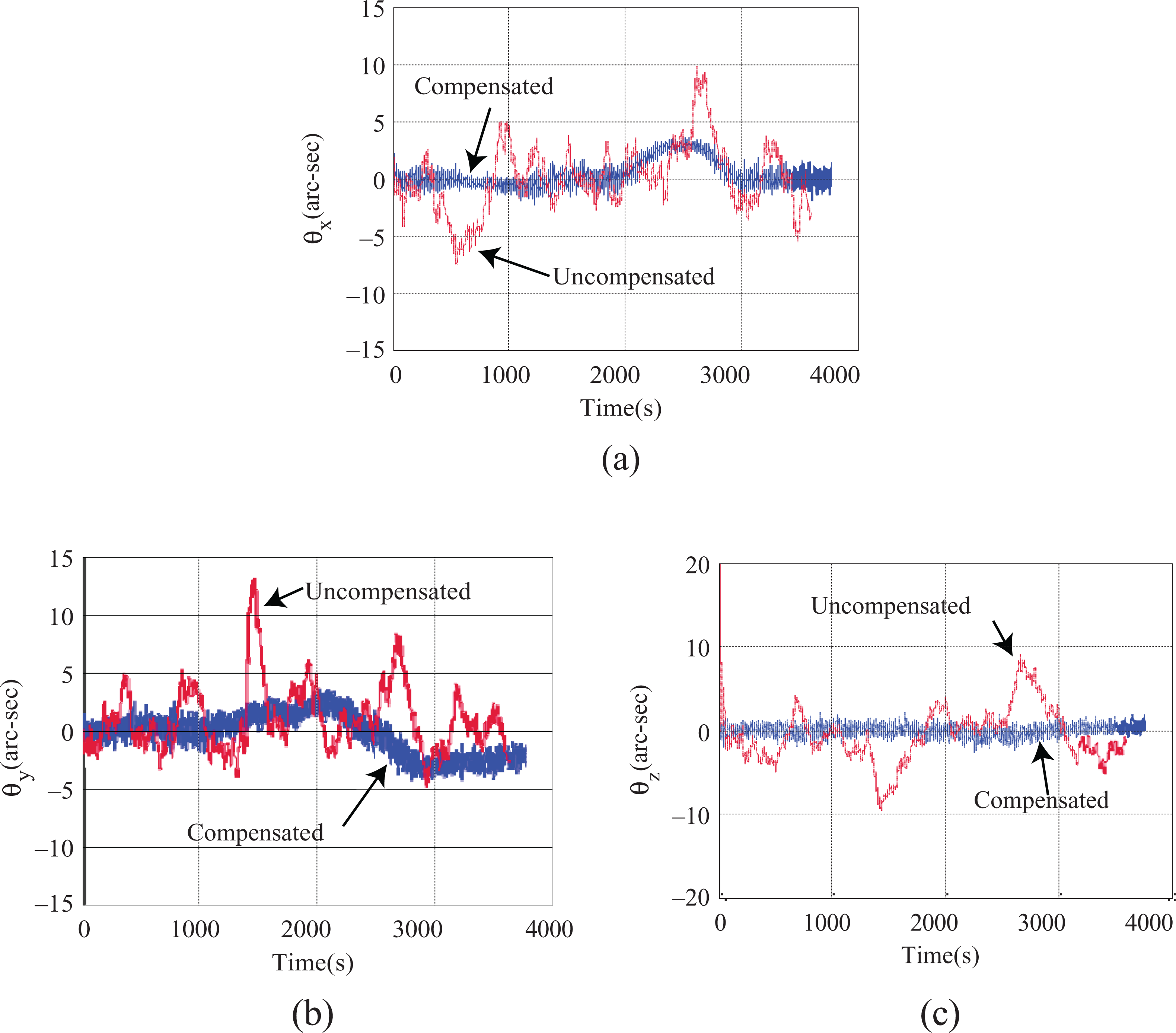
Comparisons of angular errors when using the CADS. (a) X-axis, (b) Y-axis, and (c) Z-axis. CADS: celestial attitude determination system.
As shown in Figure 6, the precision of the CADS is significantly influenced by the horizontal reference. Because the horizontal reference is provided by the INS, the angular errors of the CADS increase with increasing INS errors. By compensating the horizontal reference error through the stepwise correction strategy, the influence of the INS error on the CADS is limited and the precision is improved.
A comparison of the performance of traditional “estimation correction” using the FF and the proposed SF-DC for multi-sensor navigation was performed. Three modes were evaluated: Mode A: INS/GPS integration using only a KF; Mode B: INS/GPS with augmentation by CADS using the FF; and Mode C: INS/GPS with augmentation by CADS using SF-DC.
Figure 7 shows the results of the comparisons using attitude error curves and root mean square (RMS) errors, respectively. The statistical navigation errors of 50 times Monte Carlo simulation is shown in Table 2. Due to the large magnitude of the attitude errors in mode B, we only collected the RMS error in Table 2 and did not plot its error curves in Figure 7.

Attitude errors in navigation. (a) Roll, (b) pitch, and (c) yaw.
Attitude accuracy comparison.

CADS: celestial attitude determination system; FF: federal filter; GPS: global positioning system; INS: inertial navigation system; KF: Kalman filter; RMS: root mean square; SF-DC: stepwise fusion algorithm with dual correction.
The following conclusions can be made based on the simulation results:
The effects of augmentation with the CADS on navigation depend on the information fusion algorithm employed. In Figure 7, the attitude errors in mode B are greater than those in mode A, whereas the errors in mode C are smaller. Although both methods are augmented by the CADS, the attitude errors for the different modes vary considerably. The primary cause for this discrepancy is a lack of compensation for the horizontal reference before final information fusion, as the horizontal reference greatly affects the navigation results.
The traditional FF is unsuitable for integrating the CADS with other sensors. A comparison of the attitude errors of modes A and B in Table 2 illustrates that after integrating the CADS with INS/GPS, the attitude measurement accuracy decreases when the FF utilizes traditional “estimation–correction” methods. The accuracy decreases because the coupled errors in INS/GPS/CADS influence the FF, which reduces the potential for the CADS to improve the attitude performance.
The proposed SF-DC makes better use of the CADS and can achieve a higher accuracy attitude measurement than the traditional FF. The SF-DC has the ability to estimate and compensate the horizontal reference, whereas the FF does not have this capability. The effectiveness of the SF-DC is demonstrated in Figure 7 and Table 2. The attitude RMS errors in mode C are less than half of the magnitude of the RMS errors of mode A, indicating a greater effectiveness in utilizing the CADS.
Above all, the proposed SF-DC is appropriate for solving information fusion problems with the CADS and INS/GPS in a coupled error relationship with the horizontal reference, which can improve attitude measurement performance in UAV navigation.
Conclusions
This article derives a novel SF-DC. In the first step, the proposed algorithm decouples and estimates the errors caused by the INS and CADS. The errors are then compensated for in the second step. The attitude accuracy is significantly improved by removing coupled errors. Simulations have confirmed that the algorithm can compensate the horizontal reference error of the CADS and improve the accuracy of the computed attitude.
The proposed algorithm provides a new type of information fusion method to effectively utilize the CADS. This ability is useful in situations where high attitude performance is needed, such as in HALE-UAV remote sensing and other applications. The research presented in this article also provides a novel algorithmic filtering structure for multi-sensor integrated navigation subject to coupled-influence errors; this structure is beneficial in actual UAV navigation applications.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for helpful comments and valuable remarks.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt for financial support for the research, authorship, and/or publication of this article: This work was partially supported by the Fundamental Research Funds for the Central Universities (grant no. NS2017016).