
Abstract
A key skill for mobile robots is the ability to avoid obstacles and efficiently plan a path in their environment. Mobile robot path planning in social environment must not only consider task constraints, such as minimizing the distance traveled to a goal, but also social conventions, such as keeping a comfortable distance from humans. An efficient framework for mobile robots in social environment is proposed in this study. The framework takes into account task constraints and social conventions for path planning. Social conventions incorporate information on human states (position, orientation, and motion) and social interactions in modeling social interaction space. The two-dimensional asymmetric Gaussian function is used to compute the cost of points in social interaction space. The framework integrates the social interaction space into path planning based on A* algorithm, which allows mobile robots to bypass humans in a manner that makes humans feel safe and comfortable. The proposed method verified its effectiveness through simulation and experimental results.
Introduction
Path planning is a key technique of mobile robot navigation 1 and a hot issue in mobile robot research. 2 The ability to safely navigate in crowded and dynamic environments becomes crucial for mobile robots employed in indoor environments, such as shopping malls, museums, or schools. 3 In these environments, mobile robots often need to follow social rules when they encounter humans in certain places, such as corridors. The mobile robot should go around from the left side of the human following Chinese social rules (or from the right side of humans in the English). Conventional mobile robot navigation systems usually regard all obstacles as objects to avoid, which doesn’t follow social rules. However, in social environments, humans want to coexist with mobile robots whose behavior is akin to that of their own social rules. Therefore, mobile robot path planning should consider task constraints and social conventions.
Task constraints, including minimizing the distance traveled toward a goal, avoiding obstacles, and keeping a safe distance from obstacles, are essential elements for safe navigation in social environments. Traditional techniques for path planning usually consider task constraints, such as proactive avoidance, 4 mobile and static vector field method, 5 dynamic window approach, 6,7 improved potential 8,9 and artificial potential field methods, 10 and Bézier curve-based 11 obstacle avoidance and human motion prediction techniques. 12 –14 Although these approaches have been evaluated such that the robots can plan their trajectories to avoid obstacles, none of them consider social conventions beyond task constraints.
Social conventions include keeping a certain comfortable distance from humans, going around from the left-hand side or right-hand side of people (in China and the United States, the robot is preferred to stay to its right (from the left-hand side of people), 15 or in English, from the right-hand side of people), and not passing through group of people (mobile robots should not pass between two persons chatting with each other). Several mobile robot path planning systems are based on social conventions for navigation. Gonzalo et al. 16 present a novel robot navigation approach based on the social force model (SFM) which considers person–person, person–obstacle, and person–robot interaction forces. Pakpoom et al. 17 propose an extended SFM called the social relationship model (SRM) between humans and robots, which enables the latter to generate navigation paths in a human-like manner. The SRM uses social signals and cues to estimate the relationship between humans and robots. Kun et al. 18 propose a framework for designing active and human-compliant navigation behaviors. This framework considers not only human physical safety but also mental comfort, based on a set of safety criteria, such as proxemics, visibility, side tendency, and human priority. Ren and Charly 19 have introduced a human-aware navigation method. The navigation method considers the policy imposed on proxemics as an implicit social norm. Marina et al. 20 propose a planning-based approach for human-aware robot navigation. This approach uses predicted human trajectories and a social cost function to plan collision-free paths that consider human comfort. The social cost function is based on the Gaussian distribution. Amit Kumar and Rachid 21 proposed a framework toward a socially aware mobile robot motion using social conventions, human proximity guidelines, and clearance constraints to generate and smoothly modify motion paths. The social conventions are as follows: (1) maintaining the right-half portion in narrow passages, such as hallways, doors, or pedestrian paths; (2) passing by a person from his left side; (3) overtaking a person from his left side; and (4) avoiding close sudden appearances from behind walls. Xuan-Tung and Trung-Dung 22 propose a human-comfortable safety framework based on a dynamic social zone (DSZ) which considers human states (position, orientation, motion, and hand poses) and social interaction information about human–object and human group interactions. The DSZ-based human-comfortable safety framework uses a two-dimensional Gaussian function to model the extended personal space. An extension of this system with a proactive social motion model (PSMM) is also proposed by Xuan-Tung and Trung-Dung. 23 The PSMM is developed by taking advantages of an extended SFM and a hybrid reciprocal velocity obstacle technique.
The framework for the mobile robot path planning proposed in this study considers task constraints and social conventions, which differs from traditional techniques 4 –14 that only consider task. The task constraints and social conventions are as follows: (1) minimizing the distance traveled toward a goal to conserve energy, (2) avoiding obstacles, (3) keeping a safety buffer around obstacles, (4) keeping a certain comfortable distance from humans, (5) tending to stay on the left side of humans when passing by them (this tendency is a social convention in China), and (6) avoiding passing through the middle of a group. To enhance the navigability of mobile robots in social environments, we developed a human-comfortable safety framework that models a social interaction space using a two-dimensional asymmetric Gaussian function based on task constraints and social conventions. Thus, to generate a human-comfortable and safety path, the mobile robot must use a global planner that has the ability to optimize a cost function among multiple task constraints and social conventions. As discussed by Kirby, 15 the heuristic planner A* with a cost function can account for both task and social conventions. In this article, the A* technique-incorporated social interaction space is used to generate a safe and comfortable path.
The framework in this article is compared to the DSZ-based framework 22 as follows: (1) Social interaction space modeled in the DSZ-based framework does not consider the social convention of staying on the left or right side of people when passing them. Hence, the Gaussian function used in the DSZ-based framework is symmetrical along the x-axis. However, it is asymmetrical along the x- and y-axis in this article. (2) The group social interaction space modeling used in this article is different from that used in the DSZ-based framework. The value of cost function in the center of the group circle is large in DSZ. However, it is a preset fixed value in this article. Hence, when a robot meets a group that blocks the road and the robot has no way to go, it will pass through the center of the group.
The remainder of this article is organized as follows. The second section describes how to model social interaction space. The third section presents path planning based on the A* technique-incorporated social interaction space. The fourth and fifth sections show the simulations and real-world experiments, respectively, and the final section concludes this article.
Modeling social interaction space based on a two-dimensional asymmetric Gaussian function
The concept of personal space is an aspect of social convention for spatial interaction that has been widely studied. 15 The shape of personal space is modeled using a two-dimensional asymmetric Gaussian function.
Two-dimensional asymmetric Gaussian function
A typical two-dimensional Gaussian function is symmetrical along the X- and Y-axis. 15,22 The mean is the center of the function (xo, yo ). Furthermore, variance is represented by two values, namely, σx and σy 22

where d and θ are computed as follows


A two-dimensional asymmetric Gaussian function is developed using the Gaussian function with varying σx
and σy
values. Figure 1(a) and (b) shows the contour and surface maps of a two-dimensional asymmetric Gaussian, respectively. The function is allowed to have an arbitrary rotation such that aligning it to the X- and Y-axis is unnecessary. We use the following notations:
θpo
—rotation of the function minus
σl
—variance to the right side (θpo
direction);
σh
—variance along the rotation of function (
σs
—variance to the left side (θpo
+ π direction);
σr
—variance to the rear (
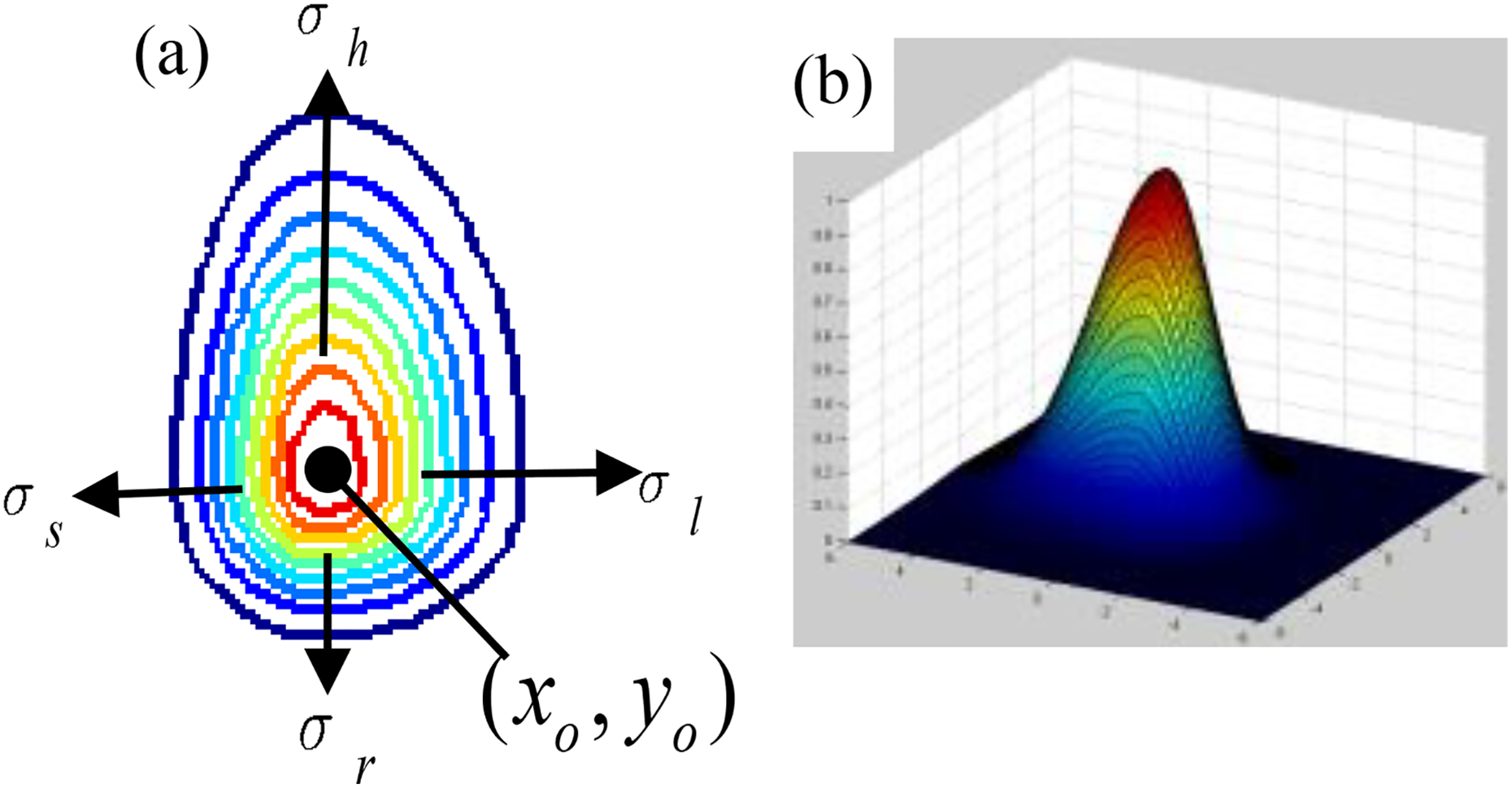
Contour and surface maps of a two-dimensional asymmetric Gaussian function.
The two-dimensional asymmetric Gaussian function is as follows

where α = θ − θpo . In addition, convert α into (−π, π].
The values of σx and σy in equation (4) vary according to α in different quadrants as follows

Modeling social interaction space
According to literature, 15 people maintain various culturally defined interpersonal distances from each other depending on the type of interaction and relationship between them . Hall divides personal space around a human into four zones, namely, intimate (from close physical contact to about 0.5 m apart), personal (friendly interaction at “arm’s length,” 0.5–1 m), social (business interaction, 1–4 m), and public (speaking to a crowd, more than 4 m away). Based on Hall’s personal space, we model the social interaction space which considers the following task constraints and social conventions: (1) avoiding humans, (2) keeping a safety buffer around humans, (3) keeping a comfortable distance from humans, (4) tending to stay on the left side of humans when passing by (this is a social convention in China), and (5) avoiding passing through a group. We use a two-dimensional asymmetric Gaussian function to model the social interaction space, which is divided into the human and human group social interaction spaces.
Human social interaction space
As shown in Figure 2, the red square block (0.5 × 0.5 m2) represents the intimate zone of a human whose position is (xo , yo ). The robot should not pass through this intimate zone. Hence, the intimate zone is defined as follows


Human social interaction space.
where (xb , yb ) is the point in the intimate zone.
In Figure 2, the outer contour of a human social interaction space is depicted by a green curve, whose intersection points with the X- and Y-axis are A, B, C, and D. The distances from points A, B, C, and D to the square block are dl
, dh
, ds
, and dr
, respectively. Therefore, a human social interaction space consists of curve ABCDA and outer contour of square, which is modeled based on the following. When a human is motionless, the distance to the front of a human social interaction space (dh
) is decided by Hall’s social zone (1–4 m). In this article, dh
= 1.2 m. When a human is on the move, dh
is affected by his speed. The faster the speed, the greater the dh
. Therefore, dh
is determined by Hall’s social zone and movement speed as follows where v is the movement speed in m/s and (v × 1) is the distance of 1 s in m. A mobile robot to the rear of a human is less dangerous than that in front of a human at the same distance. Hence, dr
should be smaller than dh
. In this paper, dr
= 0.8 m. A mobile robot on either side of a human is less dangerous than that in front of a human at the same distance. However, the risk is the same as that of a robot to the rear of a human. Particularly, the robot tends to stay on the left side of a human when passing, which is the social convention in China. Therefore, ds
< dl
= dr
< dh
. In this article, ds
= 0.5 m and dl
= 0.8 m.

A human social interaction space is represented as f(xs , ys ) which is calculated using equations (4) and (5). The value of f(xs , ys ) ranges from 0.0 to 1.0, where the maximum of f(xs , ys ) is 1.0 when the robot and human are in the same position. The value of f(xs , ys ) decreases when the robot moves farther from humans. The smaller the value of f(xs , ys ), the farther the relative distance between the robot and human. When the robot’s position is at a point on curve ABCDA as shown in Figure 2, the value of f(x ABCDA, y ABCDA) is 0.01, which is considered as the threshold of safety and comfort for humans. The four variances (σl , σh , σs , and σr ) for function f(xs , ys ) are calculated as follows

where lr is the length of the square which represents the intimate zone of a human, σ represents σl , σh , σs , and σr , and accordingly d represents dl , dh , ds , and dr .
When lr = 0.5 m, dl = 0.8 m, dh = 1.2 m, ds = 0.5 m, and dr = 0.8 m, σ is calculated by equation (8) as σl = 0.346, σh = 0.478, σs = 0.247, and σr = 0.346. f(xs , ys ) is then calculated by equations (4) and (5). Figure 3(a) illustrates a contour map of f(xs , ys ) (a human social interaction space) with a motionless human, where the person’s position is (0, 0) and rotation of the function f(xs , ys ) is 0. When a person moves at a speed of 1 m/s, the distance to the front of a human social interaction space (dh ) is 2.2 m as calculated by equation (7), and then, σl = 0.346, σh = 0.807, σs = 0.247, and σr = 0.346 are calculated by equation (8). Figure 3(b) shows the contour map of f(xs , ys ) (a human social interaction space) with a human speed of 1 m/s.

(a) Human social interaction space with motionless human. (b) Human social interaction space with a human speed of 1 m/s.
Human group social interaction space
Robots in social environments encounter not only a single person, but also groups such as friends chatting or walking abreast. A robot is not allowed to pass through the group. According to this social convention, a human group social interaction space is defined as follows: First, each person in a group models his own human social interaction space (fpi
) as shown in Figures 4(a) and 5(a). The three persons in Figure 4 are stationary, in which the position of the person on the left is (1.5 m, 1.5 m) and the rotation is −60°. The position of the person on the right is (3 m, 1.5 m) and rotation is 60°. The position of the person in the middle is (2 m, 3 m) and rotation is 180°. The two persons in Figure 5 move side by side. Second, enclose all persons of a group using a minimum circle as shown in Figures 4(b) and 5(b). Set the value of each point in the minimum circle with a fixed value fo
∈ [0, 1], where fo
indicates the danger level of the robot passing through the group. The larger the fo
, the more dangerous the robot passing through the group. The fixed value of fo
is set to 0.3 in this article. The human group social interaction space is the union set of each person’s human social interaction space in the group and the minimum circle space enclosing all persons. The value of the point in human group social interaction space is fpg
= max(fpi
,fo
). Figures 4(c) and 5(c) show the contour maps of the human group social interaction space.
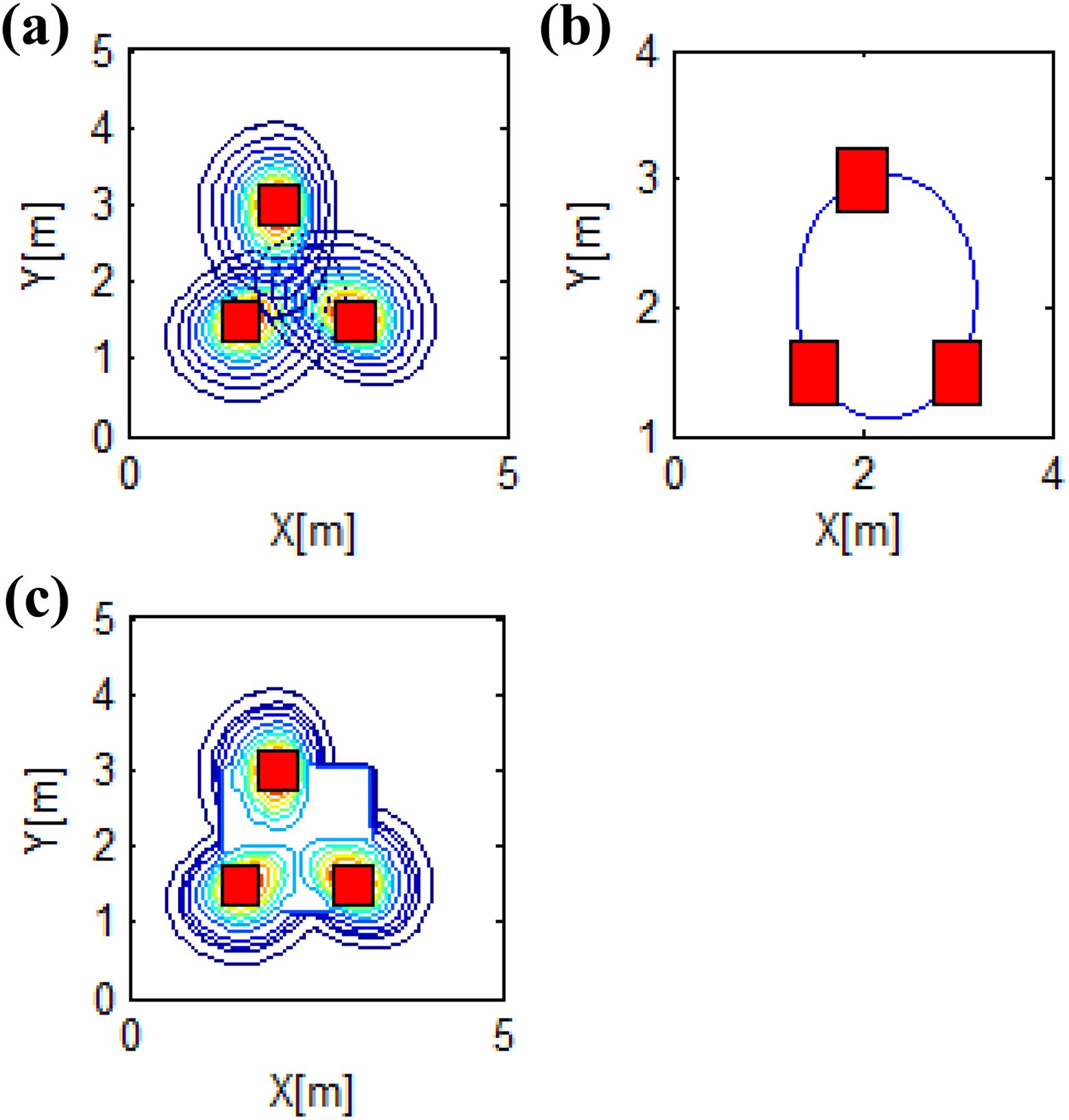
Human group social interaction space with three stationary persons.
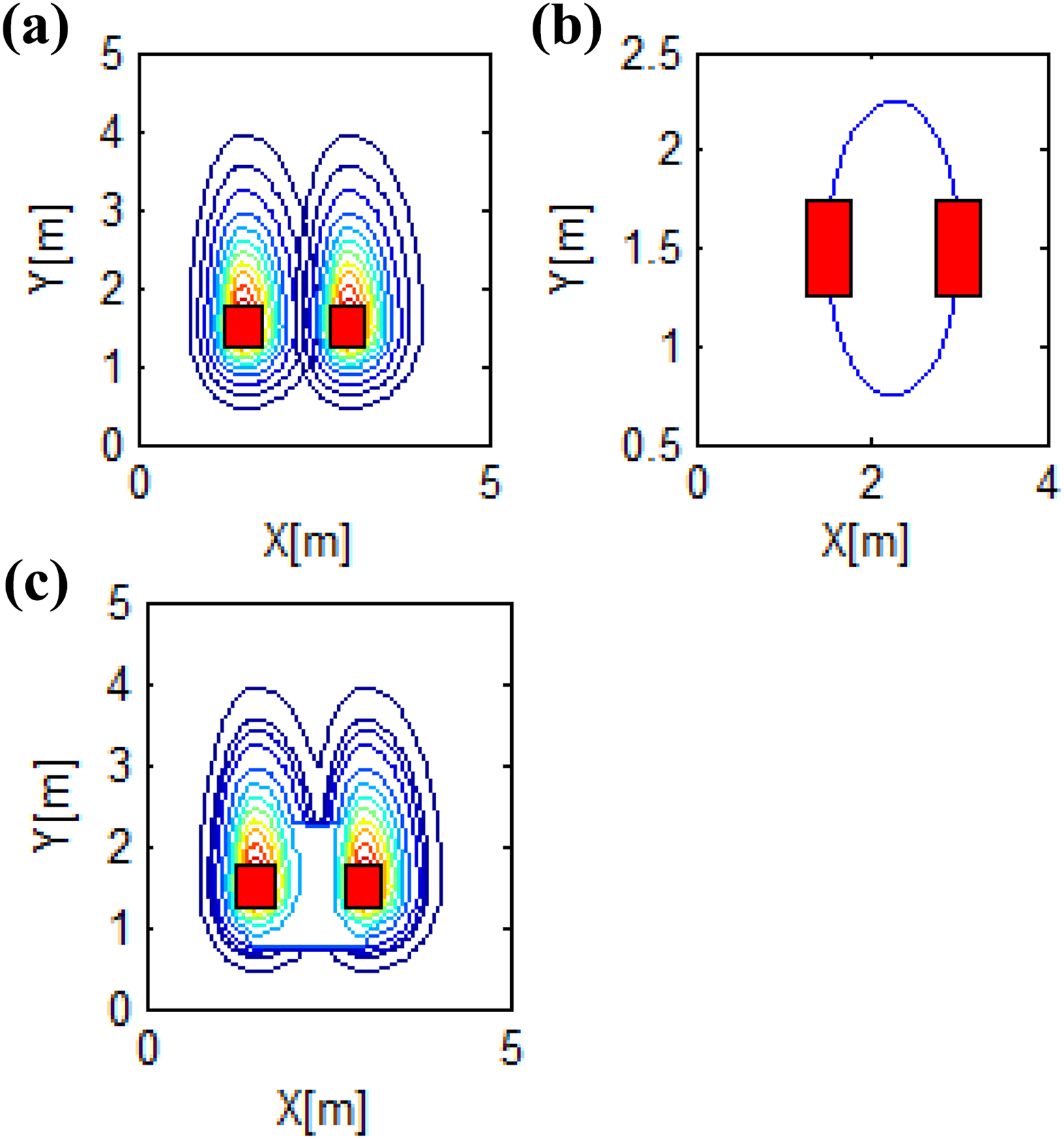
Human group social interaction space with two moving persons.
Path planning based on A* algorithm-incorporated social interaction space
In social environments, path planning for mobile robots should consider social interaction space for humans to feel safe and comfortable. We utilize A* algorithm for global optimal path planning. Figure 6 shows the flowchart of path planning based on A* algorithm-incorporated social interaction space, where f(x, y) is the value of the point in social interaction space and fb (xb , yb ) is the value of the point in the intimate zone of a human. F(x, y) is the cost function of the basic A* algorithm. The motion path for robots is planned by the A* algorithm-incorporated social interaction space.
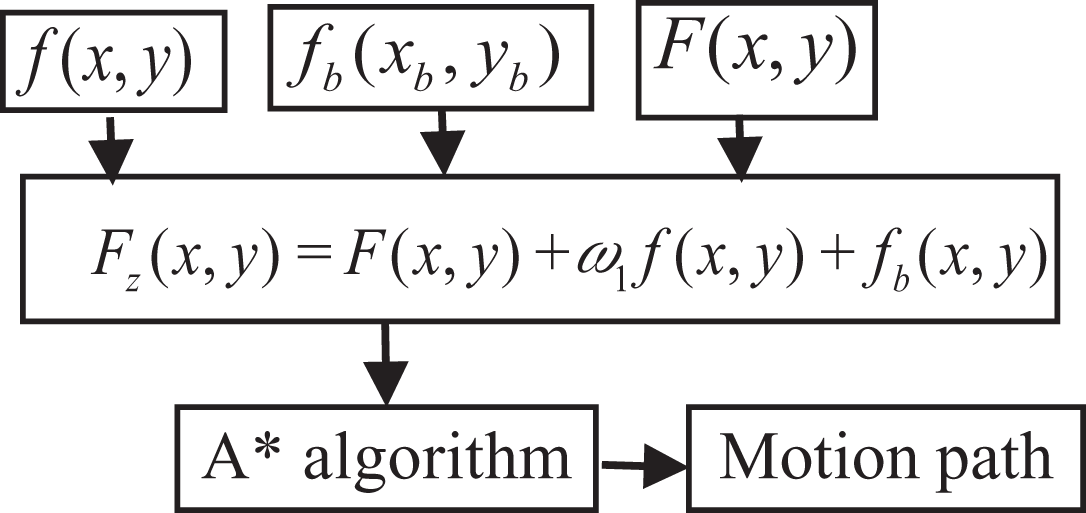
Flowchart of path planning based on the A* algorithm-incorporated social interaction space.
The A* algorithm and its derived algorithm are popular solutions to path planning. We selected the heuristic planner A* with a cost function that accounts for task constraints and social conventions, expressed as mathematical costs. The basic A* algorithm is used to find a path from start to end states. It relies on a cost function g(x, y) between two states and a heuristic function h(x, y) to estimate the expected remaining cost to goal as follows

For typical shortest-distance path planning, the cost function g(x, y) is the distance between the start and current state (x, y). In addition, the heuristic function h(x, y) is a rough estimate of the remaining distance to the goal.
To account for task constraints and social conventions, a weighted linear combination of the social interaction space, intimate zone, and basic A* algorithm cost functions is used by the A* algorithm for path planning as follows

where (g(x, y) + h(x, y)) is the cost function of the basic A* algorithm for the shortest-distance task constraint, f(x, y) is the cost of social interaction space for social conventions, ω 1 is the weight of social conventions in path planning, and fb (xb , yb ) is the cost function of a human intimate zone for person avoidance, which is infinity inside the intimate zone and zero outside the intimate zone. (g(x, y) + h(x, y) + fb (xb , yb )) is the cost function for task constraints (minimizing the distance traveled toward a goal, avoiding obstacles, and keeping a safety buffer around humans), which is the traditional obstacle avoidance technique only considering task constraints.
In grid map representing robot application environments, Fz (x, y) is the total cost of each grid. A motion path for human safety and comfort can be planned by the A* algorithm with Fz (x, y).
Simulation and analysis based on different obstacles
We implemented and tested the proposed framework in the MATLAB 2013b-based simulation. To narrow the gap between the simulated and real-world environments, we create an office-like environment ((27 × 0.5) × (45 × 0.5) m2), represented by a grid map with 27 × 45 grids at 0.5 × 0.5 m2 per grid, as shown in Figure 7. The size of the test robot is 0.5 × 0.5 m2. In the grid map of the simulation environment, the positive direction of the X-axis is from left to right, whereas that of the Y-axis is from top to bottom. We use the line and column numbers of the grid map to represent the x- and y-coordinates of the robot, respectively. For example, position (40, 9) denotes line 40 and column 9 in the grid map. Here, we set the start position of the robot at (40, 9) and end position at (40, 23). Without obstacles, the robot motion path created by the A* algorithm is a straight line, as shown in Figure 8. With various obstacles, such as a stationary person or group and a moving person or group, paths are created by the A* algorithm using equation (10) as follows:

Simulation environment.

Robot motion path without obstacles.
Stationary person as an obstacle
A stationary person appears at the grid map coordinate (40, 17) with rotation π/2. The paths created by the proposed method are shown in Figure 9(a) to (c), which correspond to ω 1 = 300, ω 1 = 10, and ω 1 = 1, respectively.
Robot motion path when the obstacle is a stationary person.
In Figure 9, the robot passes on the left side of the person as per the social convention in China to model the social interaction space. In addition, the larger the weight of the social convention (ω 1), the farther the robot is from a human social interaction space. For instance, the robot passes by a human social interaction space with ω 1 = 300 in Figure 9(a). By contrast, when the weight of social convention is small, the robot may pass through a human social interaction space to achieve the shortest-distance, such as the case shown in Figure 9(b) with ω 1 = 10 and Figure 9(c) with ω 1 = 1. The robot motion path in Figure 9(c) hardly considers social conventions, but only task constraint.
Stationary group as an obstacle
Four stationary persons are chatting at grid map coordinates (42, 16), (42, 20), (39, 16), and (39, 20), with the corresponding rotations −2π/3, 2π/3, −π/6, and π/6, respectively. The paths created by the proposed method are shown in Figure 10(a) to (c), which correspond to ω 1 = 30,000, ω 1 = 300, and ω 1 = 3, respectively.

Robot motion path when the obstacle is a stationary group.
Figure 10(a) shows that the larger the weight of social convention (ω 1), the farther the robot is from a human group social interaction space. By contrast, when the weight of social convention is small, the robot may pass through the social interaction space, as shown in Figure 10(b). Particularly, when the weight of social convention is least, path planning hardly considers social convention, but only task constraint, as shown in Figure 10(c), which makes the persons feel uncomfortable.
A moving person as an obstacle
A person is located at grid map coordinate (40, 15) with rotation −π/2. He starts moving with the robot at the speed of 0.25 m/s, whereas the speed of the robot is 0.5 m/s. The robot motion sequence path is created by the proposed method as shown in Figure 11, with ω 1 = 30,000.

Robot motion sequence path when the obstacle is a moving person.
In Figure 11, the robot passes on the left side of the person, as shown in Figure 9. The robot bypasses the social interaction space just right with ω 1 = 30,000 in Figure 11 and ω 1 = 300 in Figure 9(a). These values mean that, to make the robot bypass the social interaction space just right, the weight of social conventions must be larger when the obstacle is a moving person compared with that of a stationary person.
Moving group as an obstacle
A moving group composed of two side-by-side persons is located at grid map coordinates (39, 20) and (41, 20). They start moving with the robot in the opposite direction at the same speed (0.5 m/s) as that of the robot. The robot motion sequence path created by the proposed method is shown in Figure 12, with ω 1 = 30,000.

Robot motion sequence path when the obstacle is a moving group.
In summary, the abovementioned simulations based on various obstacles show that the proposed framework enables the mobile robot to move with socially safe and acceptable behaviors. A number of analyses for the simulations are as follows: When the mobile robot encounters a person, it will pass on his left side, which is one of the basic social conventions in China for modeling social interaction space, as shown in Figures 9, 11, and 12. The robot motion path created by the proposed method is affected by the weight of social conventions (ω
1). The larger the weight of the social conventions, the farther away the robot is from the social interaction space. By contrast, when the weight of social convention is small, the robot may pass through the social interaction space to achieve the shortest-distance, as shown in Figures 9(b) and 10(b). When the weight of social conventions is least, the path planning hardly considers social conventions, but only task constraints, as shown in Figures 9(c) and 10(c). Hence, Figures 9(a) to (c) and 10(a) to (c) illustrate the planning path affected by the weight of social conventions in path planning. The smaller the weight of the social conventions, the greater the weight of the task constraints. For the robot to bypass the social interaction space properly, the weight of social convention should be larger when the obstacle is moving than when it is stationary, such as the contrast between Figures 9(a) and 11.
Experiment
To examine and validate the feasibility of the proposed framework, we tested it on our mobile robot platform equipped with a Microsoft Kinect sensor as shown in Figure 13. The standard Microsoft Kinect sensor is composed of an infrared light projector, RGB camera, and depth sensor which provides RGB-D data with a 1920 × 1080 pixel resolution at a maximal frame rate of 30 frames per second. The depth sensor range is from 0.5 m to 4.5 m. The software core of the robot is based on MATLAB and C# programming language run on an upper computer (Intel(R) Core (TM) i5-5250U CPU at 1.60 GHz). A video with our experimental results can be found at this link (https://pan.baidu.com/s/1c125ypy).

Mobile robot platform.
We conducted an experiment in an office environment to validate whether our robot could navigate safely and socially in a real-world environment as shown in Figure 14(a). The experimental site is 22.5 m long and 12.5 m wide. The corridor is 2 m wide and 22.5 m long. The hall is a square, of 5.5 × 5.5 m2. The grid map of the experimental site has 45 × 25 grids as shown in Figure 14(b), where a grid size is 0.5 × 0.5 m2. The coordinate origin of the grid map is in the upper left corner. Additionally, the x-axis is positive in the right direction, whereas the y-axis is positive in the downward direction (which is in contrast to its traditional upward direction).

(a) Experiment site. (b) Grid map of the experiment site.
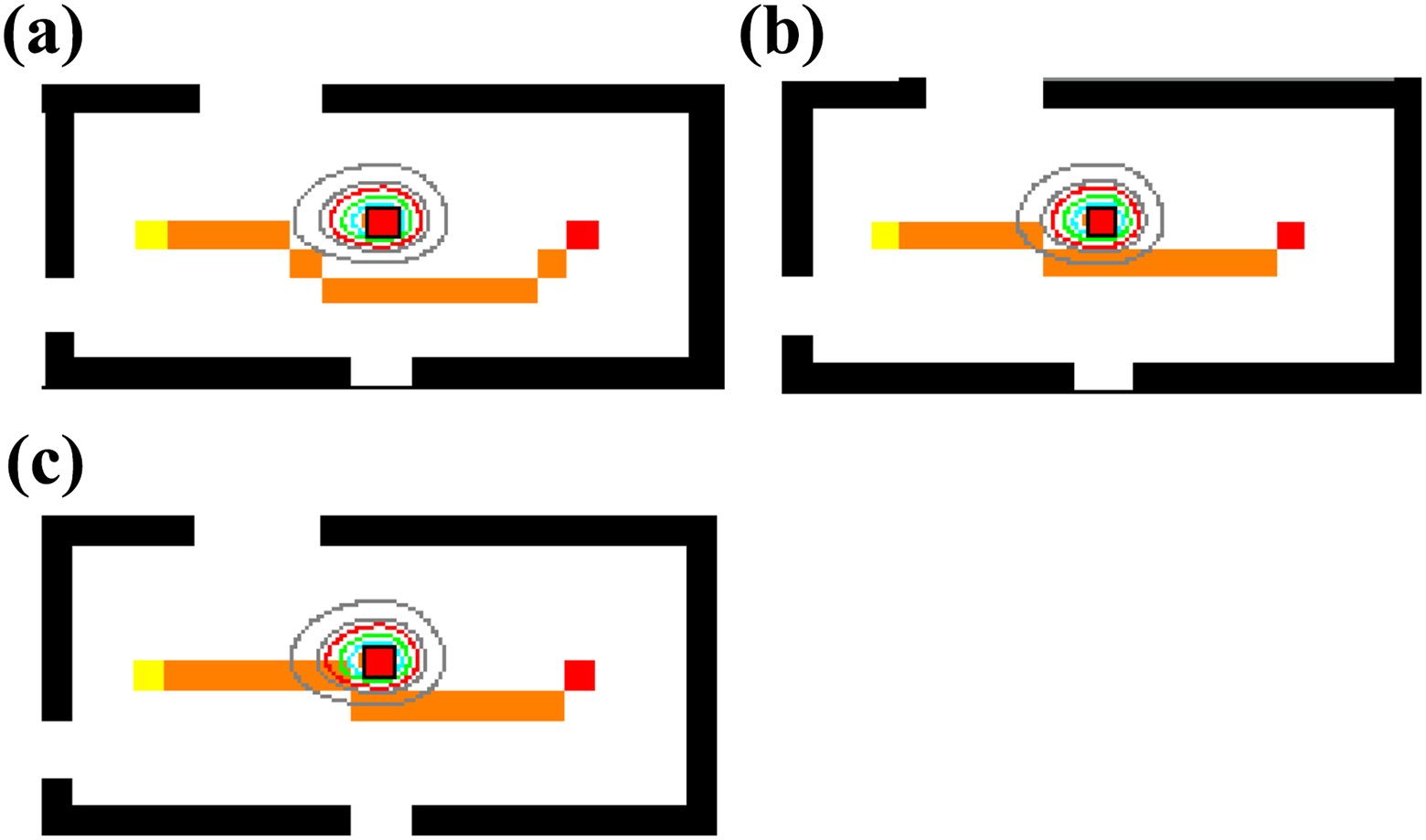
The mobile robot moves along the corridor to the target point in the hall. When the corridor and hall present no obstacle, the robot motion path created by the A* algorithm is blue, as shown in Figure 15. In this figure, the starting and target points are denoted as yellow and red dots, respectively. When the mobile robot encounters four obstacles, namely, a single person in the same direction, two persons side by side traveling in the opposite direction, a single person in the opposite direction, and a stationary group with four persons, the sequences of the robot motion path occurred as shown in Figure 16 (in orange).

Robot motion path without obstacle.

Sequences of robot motion path.
In Figure 16, the mobile robot encounters four obstacles. First, a single person is moving in the same direction in front of the robot. When the robot is close to the social interaction space behind the person, it passes on his left side, as shown in Figure 16(a) to (c). Second, the robot encounters two side-by-side persons traveling in the opposite direction, and it passes on the left side of the persons. The social interaction space in front of the persons is larger than the one behind them, as shown in Figure 16(c) to (e). Third, a single person is moving on the left side of the robot in the opposite direction. The robot tends to pass the rear of the person, as shown in Figure 16(e) and (f). Fourth, the robot encounters a group with three stationary persons. The robot bypasses the social interaction space of the group, as shown in Figure 16(f) and (g). In summary, the mobile robot moves along the corridor to the target point in the hall safely and socially.
Conclusion
We proposed an efficient framework for mobile robot navigation systems in social environments. The framework considers task constraints and social conventions for path planning, which differs from traditional techniques that only consider task constraints. Social conventions take human states (position, orientation, and motion) and social interaction into account to model social interaction space which is indicated by a two-dimensional asymmetric Gaussian function. The robot motion path created by the proposed A* method incorporates social interaction space and meets task constraints and social conventions as follows: (1) minimizing the distance traveled to a goal, (2) avoiding obstacles, (3) keeping a safety buffer around obstacles, (4) keeping a certain comfortable distance from humans, (5) tending to stay on the left side of people (which is the social convention in China), and (6) avoiding passing through a group.
The social interaction space-based framework in this article enables the mobile robot to reach a target using an optimal path, which makes humans safe and comfortable around the robot.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.