
Abstract
A new enhanced adaptive fuzzy sliding mode control approach is proposed in this article with its good availability for application in control of a highly uncertain nonlinear two-link pneumatic artificial muscle manipulator. Stability demonstration of the robust convergence of the closed-loop pneumatic artificial muscle manipulator system based on a novel enhanced adaptive fuzzy sliding mode control is experimentally proved using Lyapunov stability theorem. Obtained result confirms that the new enhanced adaptive fuzzy sliding mode control method, applied to the two-link uncertain nonlinear pneumatic artificial muscle manipulator system, is fully investigated with better robustness and precision than the standard sliding mode control and fuzzy sliding mode control techniques.
Keywords
Introduction
Up to now, it is evident to recognize the benefits of sliding mode control (SMC) related to maintain robust to uncertainties and external noises. A SMC approach via its switching rules ensures asymptotic stability of the investigated nonlinear system. Hence SMC has been increasingly applied in numerous industrial applications. 1 Esmaeili et al. 2 and Yang and Kim 3 successfully applied SMC for trajectory tracking of non-holonomic wheeled mobile robots. Shiri and Saeed 4 introduced adaptive SMC for robotic arms with parameter uncertainty. Matveev et al. 5 proposed a new nonlinear SMC of an unmanned agricultural tractor. Sarfraz et al. 6 applied a novel robust stabilizing control of a non-holonomic underwater vehicle system with uncertainties via adaptive integral sliding mode. Unfortunately, the inherent drawback of SMC is related to its switching control issue which causes chattering phenomenon. In order to remove the chattering effect, it is often to add a saturated function 7 within the sliding surface. The disadvantage issued is that this addition can spoil Lyapunov stability of the closed-loop nonlinear plant. As a consequence, traditional SMC method encounters difficulty in controlling unstructured model uncertainties. Recent studies proved that it can partially surpass this difficulty by combining a SMC controller and other intelligent models. Son et al. have successfully identified and controlled the nonlinear dynamic system through combining MDE with adaptive neural model, 8 and Fei et al. did that by combining SMC with recurrent neural structure. 9
An efficient combination for nonlinear dynamic system control has been introduced between SMC method and fuzzy proportional-integral controllers, 10,11 or between SMC and adaptive fuzzy model. 12 –14 The adaptive fuzzy rules in these techniques are implemented to ensure partial satisfaction of the Lyapunov stability. Such initial promising results have inspired for recently proposed hybrid fuzzy SMC (FSMC) methods in which the asymptotic stability of the investigated closed-loop FSMC plant is partly and efficiently demonstrated. Soltanpour et al. 15 , Anand and Mary 16 , Wang Y and Fei 17 , and Ullah et al. 18 applied FSMC in control of driving systems, including brush-less direct current motor, 15,16 permanent magnet synchronous motor, 17 position servo system. 18 Oveisi et al. 19 proposed adaptive FSMC combined with robust observer for uncertain nonlinear system control. Boldbaatar et al. 20 introduced a new self-organizing FSMC for uncertain temperature control. Moussaoui et al. 21 proposed an adaptive FSMC control for under-actuated dynamic system. Fei et al. 22 successfully introduced a new adaptive FSMC controller for micro electro-mechanical systems triaxial gyroscope. In robotic applications, FSMC controllers have been successfully applied in numerous cases. Jiao et al. 23 have applied the adaptive type-2 FSMC for nonlinear hypersonic aircraft system. Li et al. 24 proposed an adaptive SMC combined with an interval type-2 fuzzy system for controlling nonlinear manipulator. Liang et al. 25 successfully applied a new path following control of an under-actuated autonomous underwater vehicle based on fuzzy backstepping sliding mode approach. The advantage of this combination is that the fuzzy rules permit fuzzy systems to approximate arbitrary continuous equations. Furthermore as to approximate a time-varied nonlinear system, a fuzzy set often needs quite many fuzzy rules. Then, the very huge fuzzy rules will require a high time-consuming computation cost.
Nowadays, pneumatic artificial muscle (PAM) manipulator has been increasingly applied in numerous service, health care, and industrial applications. Unfortunately, the drawback related to the uncertain and hysteresis characteristics of PAM actuators has inspired numerous hybrid advanced controllers to efficiently control the PAM-based robotic applications, including the FSMC. Amar et al. 26 successfully applied a decentralized radial basic function neural networks type-2 FMSC controller for robot manipulator driven by artificial muscles. Chang 27 proposed an adaptive self-organizing FSMC controller for a 2-degree of freedom (2-DOF) serial PAM robot. The fact is that such proposed FSMC technique seems too complex to apply in practice and takes more time to compute and unable to attain required precision. Shi et al. 28 proposed the hybrid control for a parallel PAMs manipulator combining SMC and fuzzy cerebellar model articulation controller (CMAC). Nevertheless, this hybrid fuzzy CMAC-SMC approach for PAM manipulator system seems too complex to be applied in industry, and furthermore, the system stability based on Lyapunov stability principle is not yet demonstrated.
Based on the abovementioned results this article introduces a novel enhanced adaptive fuzzy sliding mode control (EAFSMC) approach which will be tested on the highly nonlinear serial PAM robot. The new contributions of this article are as follows: Redesign adaptation laws of algorithm which is initiatively designed for a serial PAM robot and attains more accurate and takes less time to compute than the compared FSMC of serial PAM robot
22
and the comparative hybrid fuzzy CMAC-SMC of parallel PAM manipulator.
23
Initiatively develop the Lyapunov function candidate and mathematically demonstrate the asymptotic convergent stability for the closed-loop serial PAM robot under proposed EAFSMC. Comparatively verify both FSMC algorithms
22,23
and the new advanced EAFSMC algorithm related to two principal concepts: the flexibility of the fuzzy set in use and the results that EAFSMC adaptively and robustly ensures during the control of a highly nonlinear serial PAM robot. Concretely, it comparatively tests the availability of online tuning approach, the number of fuzzy if-then laws installed of the new EAFSMC controller, the tracking precision performance, and the total time-consuming computation criteria, respectively. Moreover, our analysis of the experiment tests will be also focused on chattering attenuation.
The rest of this article is organized as follows. The second section introduces the highly nonlinear serial PAM robot. The third section presents the traditional FSMC and its application to a highly nonlinear serial PAM robot. The fourth section presents the novel proposed EAFSMC approach and demonstrates its stability based on Lyapunov theorem well suited to the serial PAM robot application. The fifth section presents the experiment results of the proposed EAFSMC algorithm applied to the highly nonlinear serial PAM robot system. Eventually, the sixth section contains the conclusion.
The 2-DOF serial PAM robot set-up
The experimental setup configuration and working principle of the 2-DOF serial PAM robot is shown in Figures 1 and 2.
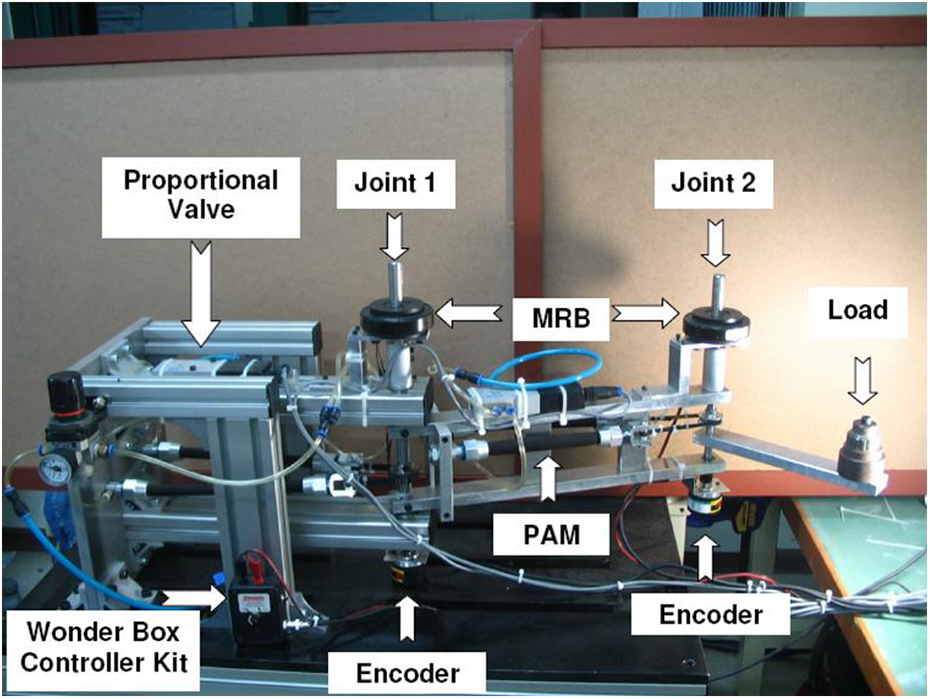
Experimental setup configuration of the 2-DOF serial PAM robot. DOF: degrees of freedom; PAM: pneumatic artificial muscle manipulator.
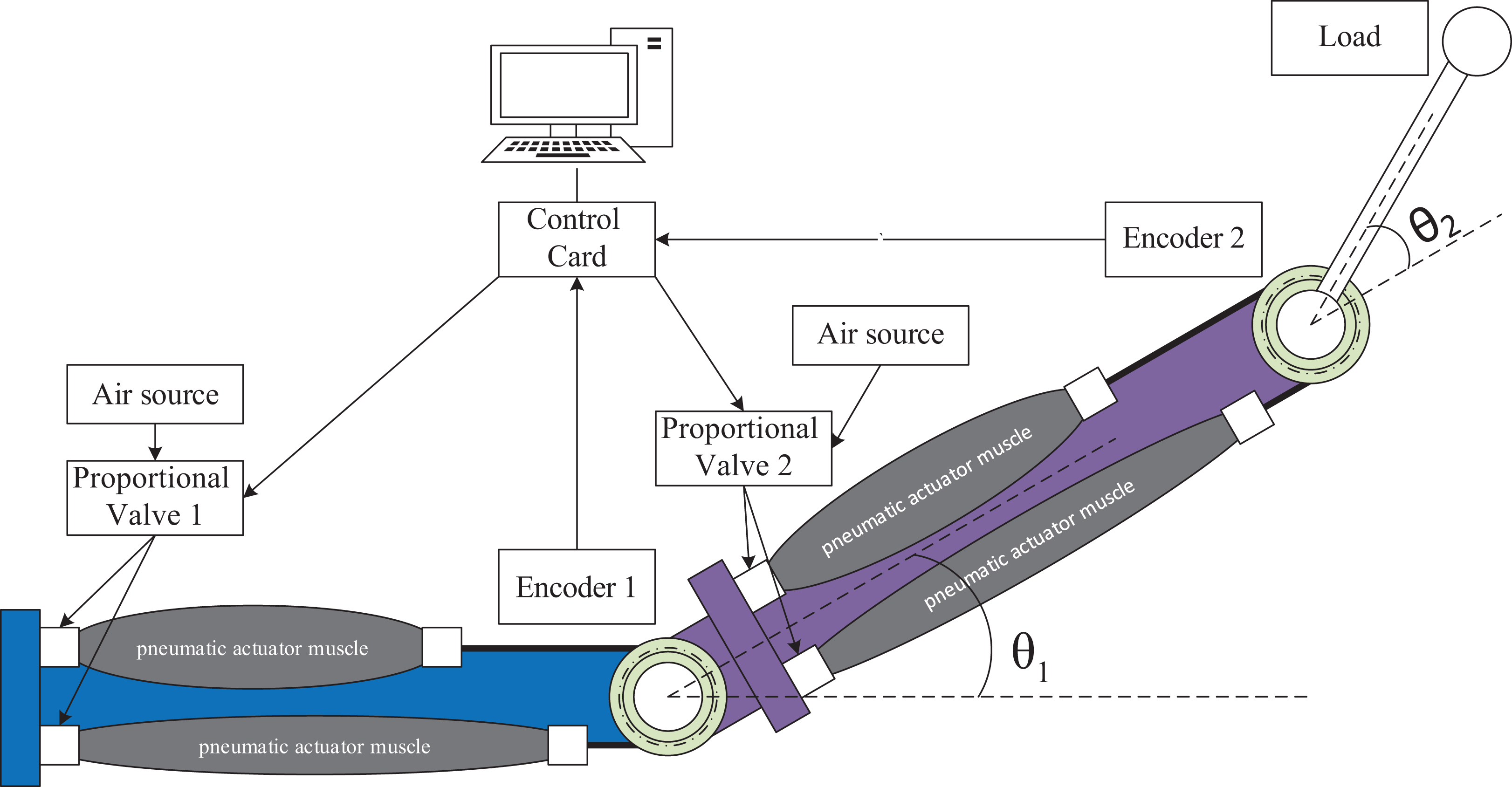
Experimental configuration of the 2-DOF serial PAM robot. DOF: degrees of freedom; PAM: pneumatic artificial muscle manipulator.
The experimental configuration of the 2-DOF serial PAM robot is illustrated in Figure 2. The setup includes a personal computer (PC; Pentium 4.7 GHz) that generates the voltage signals u 1(t) and u 2(t) to control the two proportional valves (MPYE-5-1/8HF-710B [FESTO-Germany]), via a D/A card (PCI 1720 [AdvanTech-Taiwan]) which converts numerical signals from PC to analog voltages, u 1(t) and u 2(t), respectively.
The rotation torque is produced by the pneumatic pressure difference, provided from air compressor, between the antagonistic PAM muscles. Hence, both joints of the 2-DOF serial PAM robot will be rotated to track the required joint angles (Y REF1(k) and Y REF2(k)), respectively. The joint angles, θ 1 (°) and θ 2 (°), are measured by two rotary encoders (H40-8-3600ZO [Metronix-South Korea]) and sent back to the PC via a 32-bit counter card (PCI QUAD-4 [COMPUTING MEASUREMENT, USA]) which converts pulse signals to joint angle values y 1(t) and y 2(t), respectively. The pneumatic flow is provided under the pressure of 4 bar and the software algorithm of the closed-loop control system is coded in C-mex code run in Real-Time Windows Target tool of MATLAB-SIMULINK (MATLAB@) platform. Table 1 tabulates the configuration of the experimental serial PAM robot setup installed from Figure 2.
Lists of the experimental configuration setup

SMC of the 2-DOF Serial PAM robot
The dynamic equation of an n-link robotic manipulator is defined as

where
A 2-DOF serial PAM robot is used as our simulated robotic manipulator illustrated in Figure 3.

Compact structure of the 2-DOF serial PAM robot. DOF: degrees of freedom; PAM: pneumatic artificial muscle manipulator.
The dynamics of the investigated 2-DOF serial PAM robot is described as follows

where

Our aim is to control the serial PAM robot (equation (2)) to accurately follow the desired trajectory

where

The tracking error is defined as

where
Then, the sliding surface is defined as

where λ = diag[λ 1, λ 2], in which λ 1 and λ 2 are selected as the bandwidth of the 2-DOF serial PAM robot control.
It also needs to select τ to confirm the sufficient requirement. First the reference state is defined as

Then the control input τ is determined as

where
Using equations (5) and (10), it gives

where

Then the Lyapunov function candidate is described as

Since

From equations (11) and (14), it gives

which represents a skew-symmetric matrix satisfying

Then

For

To remove the chattering issue, a saturation function is applied in the control rule instead of the sign function as presented in equation (10). The control rule has the form as,

In this standard SMC approach, the model of the serial PAM robot is partly undetermined. It needs to know the model structure of the serial PAM robot. But we can’t determine the exact values of m
1
l
2 and m
2
l
2 in
We simulate this classic SMC method for the 2-DOF serial PAM robot. We pick p 1 = 1 and p 2 = 2. Since serial PAM robot cannot instantaneously follow a step sequence, the desired trajectory will be the output of the filtered sequential values of unit steps. We define the transfer function of prefilter for each joint of the serial PAM robot as

The beginning values of the serial PAM robot’s joint positions are set to 0.5 rad. The estimated dynamics of the serial PAM robot are
First we choose
Figure 4 represents the tracking performance and the tracking error of the 1st joint of serial PAM robot in classic SMC. Figure 5 describes the results of control input value and the SMC surface of the 1st joint of serial PAM robot in SMC. Similarly, Figure 6 presents the tracking performance and the tracking error of the 2nd joint of serial PAM robot in classic SMC. Figure 7 illustrates the results of control input value and the SMC surface of the 2nd joint of the serial PAM robot in SMC. Figures 4 and 6 show that the tracking accuracy is obtained with significant error. The drawback rests here related to the chattering problem significantly exists as shown in Figures 5 and 7.
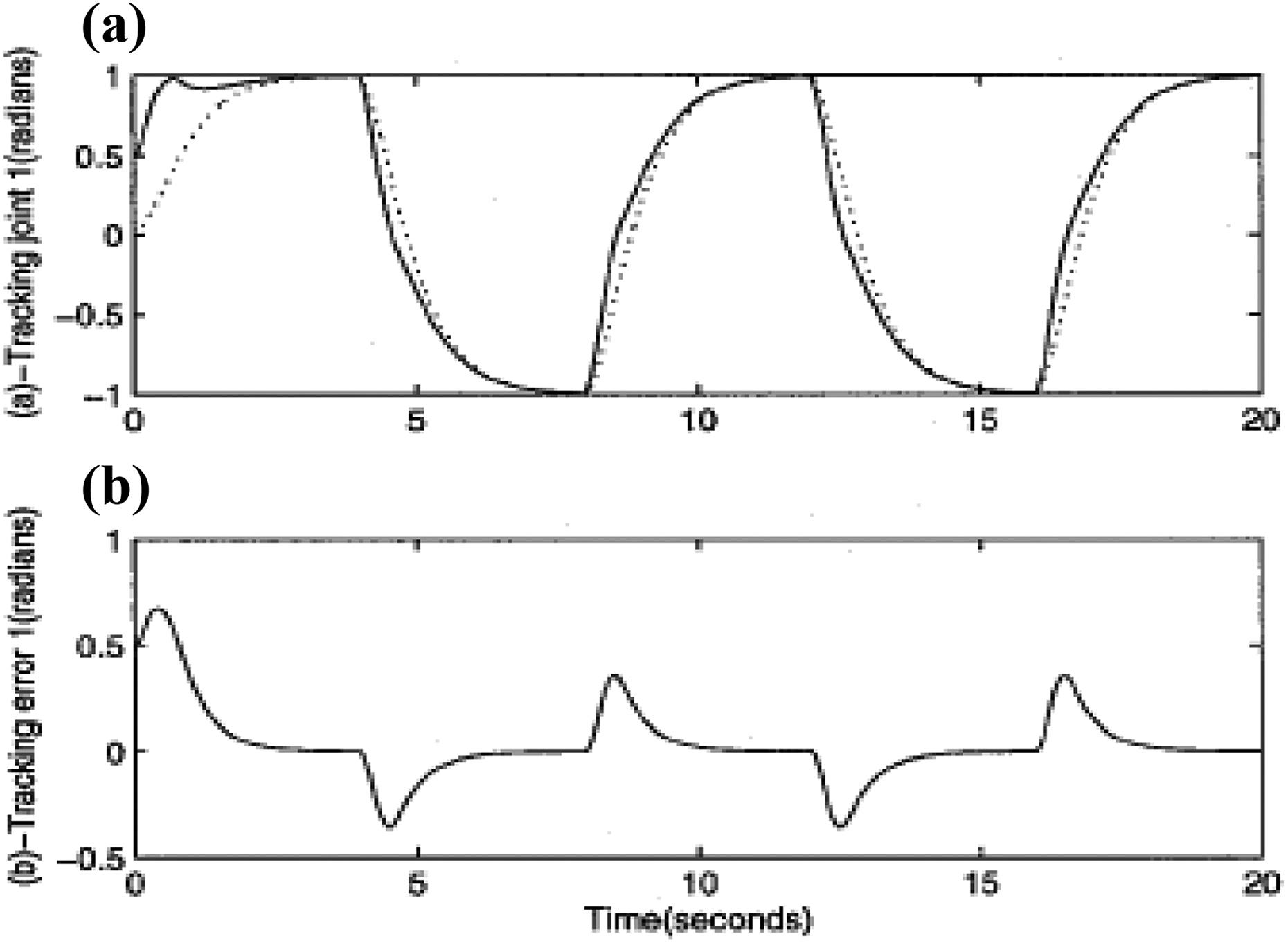
(a) Tracking and (b) errors of the 1st joint of serial PAM robot in classic SMC. Dash line: desired trajectory; solid line: actual trajectory; PAM: pneumatic artificial muscle manipulator; SMC: sliding mode control.
(a) Control input value and (b) SMC surface of the 1st joint of serial PAM robot in classic SMC. SMC: sliding mode control; PAM: pneumatic artificial muscle manipulator.
(a) Tracking and (b) errors of the 2nd joint of serial PAM robot in classic SMC. Dash line: desired trajectory; solid line: actual trajectory; PAM: pneumatic artificial muscle manipulator; SMC: serial mode control.

(a) Control input value and (b) SMC surface of the 2nd joint of serial PAM robot in classic SMC. SMC: sliding mode control; PAM: pneumatic artificial muscle manipulator.
From the above results, it is clear to notice that SMC can deal with nonlinear systems especially for the nonlinear and uncertain serial PAM robot. The control input forces the serial PAM robot to track the desired trajectories. The drawback related to the chattering issue is attenuated based on the saturation function applied in the control rule. The Lyapunov stability theorem is proved only in the case of the sign function applied in the control rule. Thus the classical SMC can be used to control the serial PAM robot under the condition of partly known model dynamics. In the next section, the proposed EAFSMC system is initiatively applied to successfully estimate and robustly control the serial PAM robot systems.
Proposed EAFSMC
The previous results show that the traditional SMC controller encounters difficulty in controlling unstructured system uncertainties. In order to solve this task, this article proposes novel EAFSMC algorithm by combining SMC and specific fuzzy model. The new concept here relies on the fact that the addition of an adaptation law to a FSMC helps ameliorate the system’s tracking performance via online updating the parameters of the fuzzy rules. Then, the new EAFSMC algorithm applied to position control of a two-link serial PAM robot is introduced in detail.
In general, the dynamic equation of an m-link serial PAM robot is described as

where
Proposed EAFSMC algorithm implementation
This article introduces a novel EAFSMC algorithm applied to improve the tracking control performance of the 2-DOF serial PAM robot. The new fuzzy model used in this method is a multiple inputs multiple outputs fuzzy system whose fuzzy if-then laws are perfectly reduced by considering the SMC surfaces as the input variable.
We rewrite equation (21) as

where
Then, the sliding surface is defined as

where

Let

where

in which

The fuzzy system

where
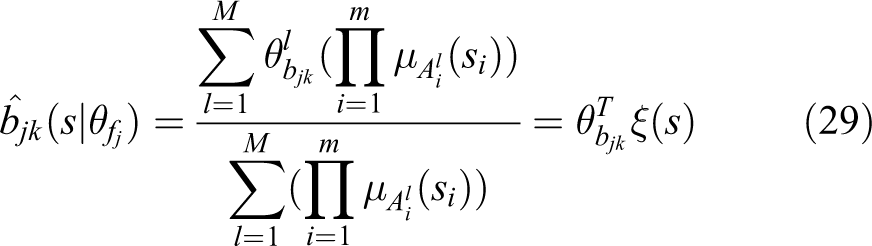
The novel fuzzy model

Then the adaptation laws are described as

where
Stability proof of the proposed EAFSMC algorithm
First, it needs to define the minimum approximation errors as



where

Put (equation (35)) into (equation (24)), it leads to

Then for each sj , we can rewrite as

where
The followed Lyapunov function Vj is defined for each joint of the serial PAM robot

The derivative of Vj is determined as

where

According to Universal Approximation Theorem, Ωj proves as small as possible. Therefore, it is simple to pick
In summary, the novel EAFSMC algorithm is proposed with the adaptation laws designed with respect to the Lyapunov stability theorem. The convergence and stability of the closed-loop serial PAM robot is mathematically demonstrated based on the Lyapunov stability principle.
Simulation results
Dynamic equations of the 2-joint serial PAM robot
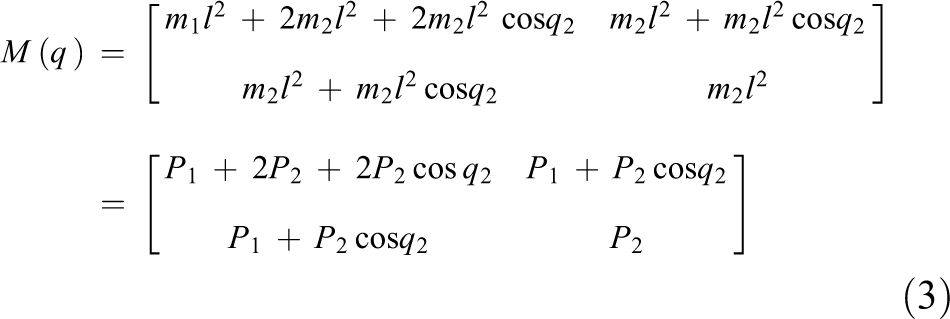
The dynamic equations for the 2-joint serial PAM robot are calculated as

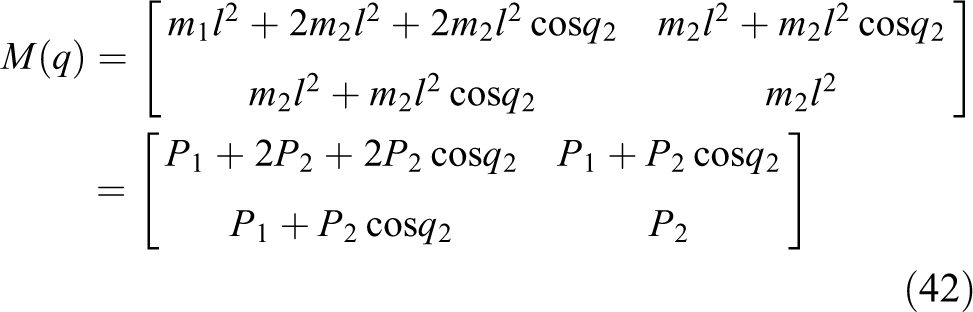


where m 1, m 2 represent the mass of links 1 and 2, respectively; l denotes the length of links 1 and 2; and q 1 and q 2 represent the joint-angle positions of links 1 and 2, respectively. The values of the parameters are chosen as P 1 = m 1 l 2 = 1 and P 2 = m 2 l2 = 2. The serial PAM robot model’s transfer function for each link is described as

The required trajectory is the output of filtered sequential unique steps. The starting values of the serial PAM robot’s joint-angle positions are given as 0.5 rad. Throughout the proposed algorithm, we choose the parameter λj in the sliding surface as same as the bandwidth of the desired model. The predefined adaptation gains in adaptation laws are selected as a trial and error values.
Control results of the proposed EAFSMC method
The novel EAFSMC approach is able to adaptively estimate online the dynamic features of the 2-DOF serial PAM robot presented in equation (41). Then, the proposed EAFSMC algorithm is quite available for controlling the nonlinear serial PAM robot system containing uncertain dynamic characteristics. The advantage of EAFSMC algorithm is to successfully and robustly remove the chattering issue using the new fuzzy-based compensators in the control rule. In comparison with FSMC algorithm applied in the serial PAM robot, 22 the number of new fuzzy if-then laws is significantly reduced by applying the SMC surfaces as the inputs with the proposed EAFSMC method.
Concretely we select k 1 = 5, k 2 = 7 as the number of fuzzy membership functions (MPs) for each input value, namely NM NS ZO PS PM and NB NM NS ZO PS PM PB, respectively. The parameters of the fuzzy MPs for s j are selected using the simulation results of the sliding surface s j realized in the “SMC of the 2-DOF Serial PAM robot” section. The membership functions for the variable s j ( j = 1, 2), described in Figure 8, are expressed as








Membership functions of sj .
The structure of MPs for each input is defined as in equation (46). Since there is an inverse matrix
Figure 9 represents the tracking performance and the tracking error of the 1st joint of the serial PAM robot with proposed EAFSMC. Figure 10 describes the results of control input value and the SMC surface of the 1st joint of the serial PAM robot with proposed EAFSMC. Continually, Figure 11 presents the tracking performance and the tracking error of the 2nd joint of the serial PAM robot with proposed EAFSMC. Finally, Figure 12 illustrates the shape of control input value and the SMC surface of the 2nd joint of the serial PAM robot with proposed EAFSMC.

(a) Joint-angle tracking performance and (b) joint-angle tracking errors of joint 1 of serial PAM robot with proposed advanced EAFSMC algorithm. Dash line: required trajectory; solid line: real trajectory. PAM: pneumatic artificial muscle manipulator; EAFSMC: enhanced adaptive fuzzy sliding mode control.

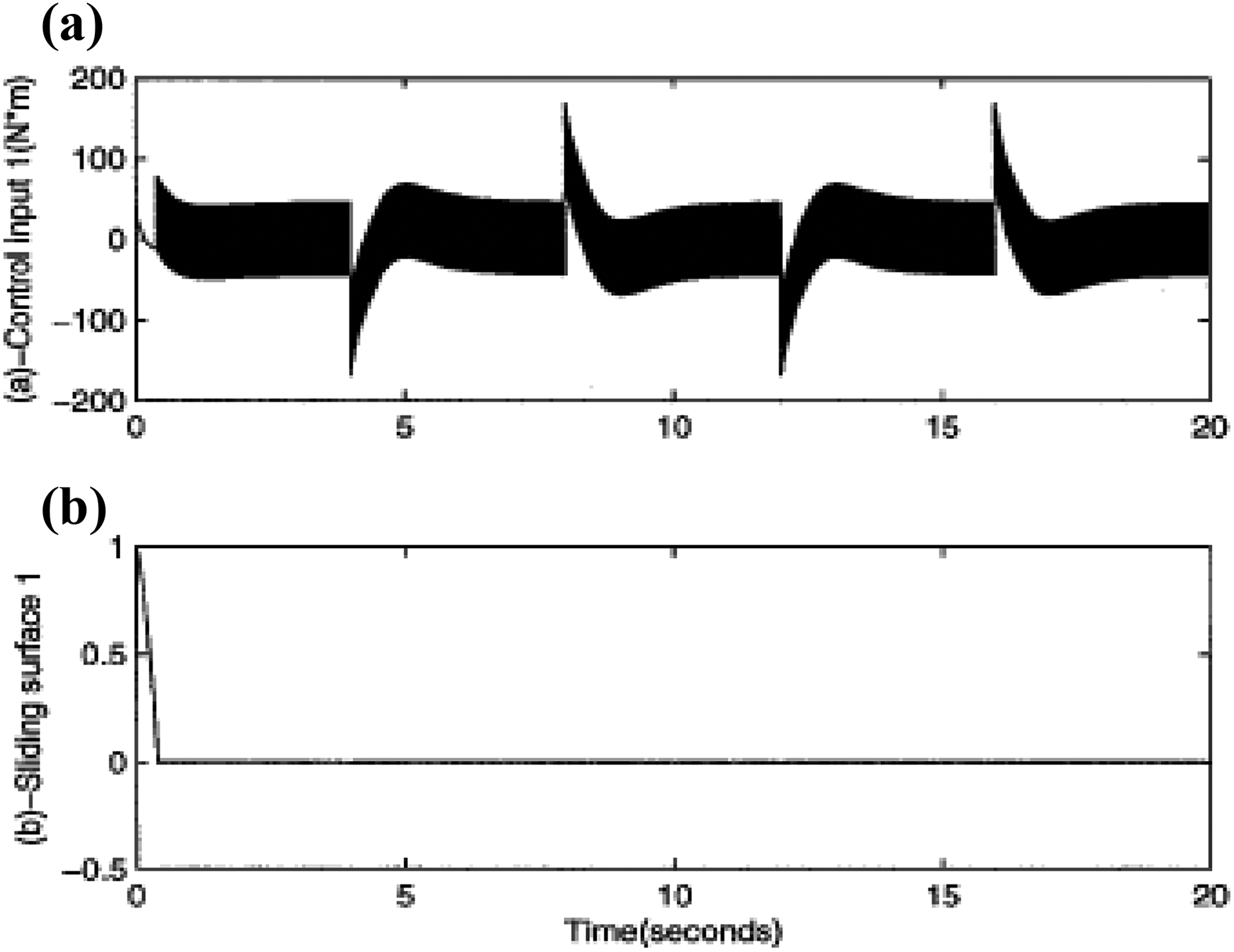
(a) Control signal and (b) SMC surface of joint 1 of serial PAM robot with proposed advanced EAFSMC algorithm. SMC: sliding mode control; PAM: pneumatic artificial muscle manipulator; EAFSMC: enhanced adaptive fuzzy sliding mode control.

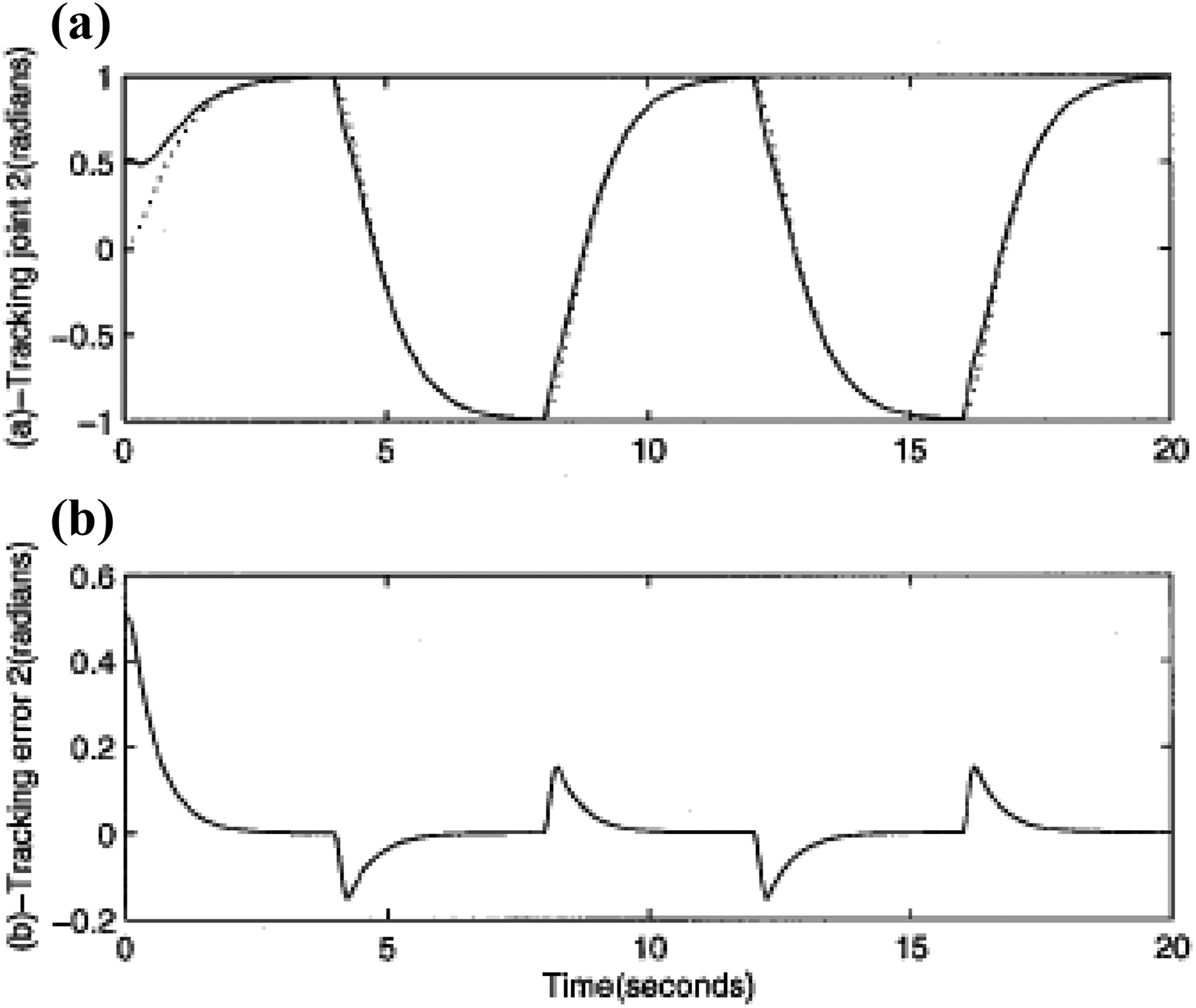
(a) Joint-angle tracking performance and (b) joint-angle tracking errors of joint 2 of serial PAM robot with proposed EAFSMC algorithm. Dash line: required trajectory; solid line: real trajectory. PAM: pneumatic artificial muscle manipulator; EAFSMC: enhanced adaptive fuzzy sliding mode control.

(a) Control signal and (b) SMC surface of joint 2 of serial PAM robot with proposed EAFSMC algorithm. SMC: sliding mode control; PAM: pneumatic artificial muscle manipulator; EAFSMC: enhanced adaptive fuzzy sliding mode control.
Figures 9 and 11 show that the joint-angle tracking errors are successfully bounded in the limit [−0.005, 0.005] rad. Furthermore, from Figures 10 and 12, it is evident to confirm that the chattering issue is successfully removed by applying the new fuzzy model as an adaptive compensator in the control rule.
Figure 13 presents the comparative ellipsoid trajectory tracking performance of the serial PAM robot system. From this figure, it is evident to see that the proposed EAFSMC method provides more accurate and much better performance than the FSMC applied in the study by Chang 27 and the standard SMC, respectively.
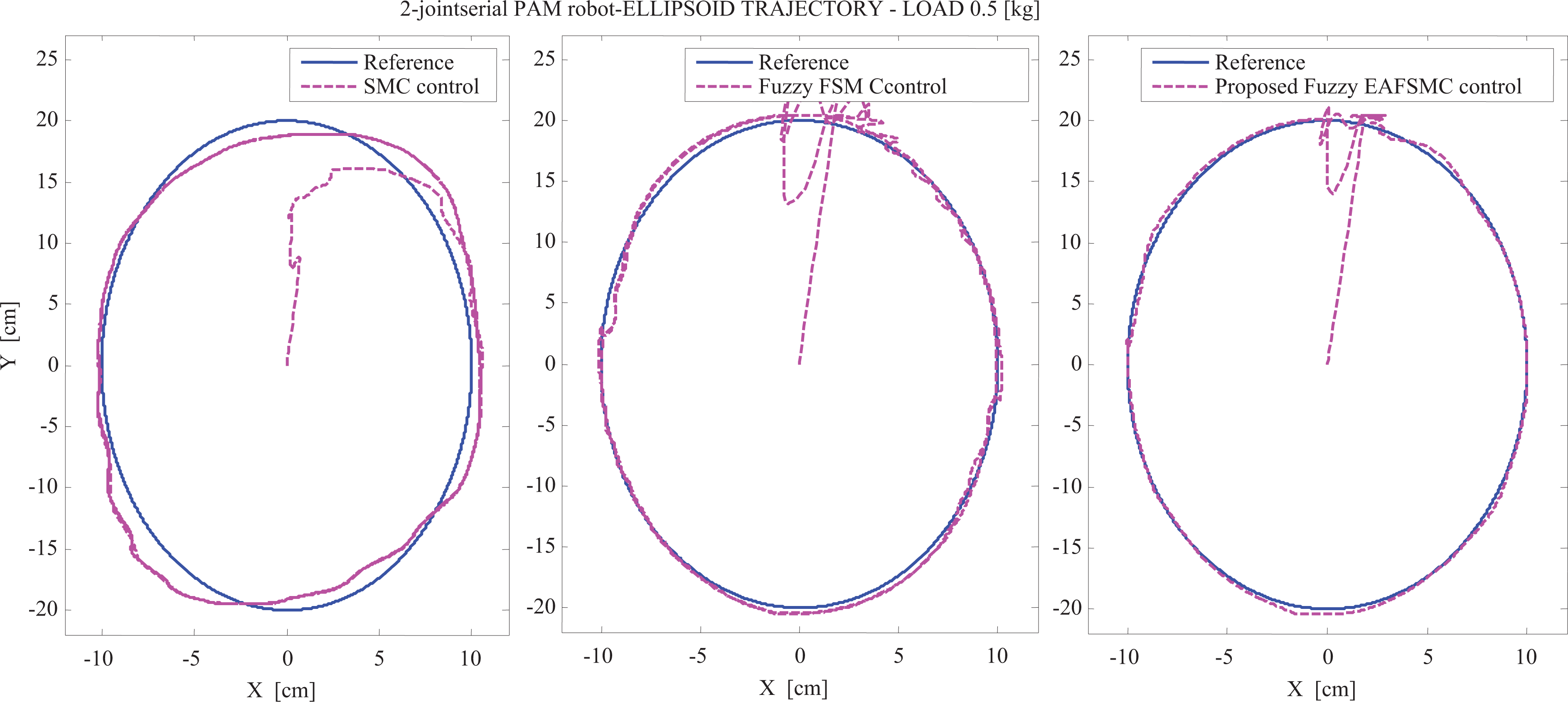
Comparative ellipsoid trajectory tracking performance.
In summary, this article proposes an EAFSMC algorithm to improve the tracking control performance of a highly uncertain nonlinear serial PAM robot. In this approach, the proposed EAFSMC fuzzy system is implemented to adaptively identify the dynamic features of the serial PAM robot. Related to the m-DOF serial PAM robot, with k
2 MPs designed for each input, the total number of fuzzy if-then laws for each joint of the serial PAM robot is
Moreover, comparative results of the novel proposed EAFSMC controller and of FSMC approaches used by Chang 27 and Shi and Shen, 28 applied to the highly nonlinear serial PAM robot system, related to the tracking precision performance, the total time-consuming computation criteria, and so on, are tabulated in Table 2.
Comparative performance results.

SMC: sliding mode control; CMAC: cerebellar model articulation controller; EAFSMC: enhanced adaptive fuzzy sliding mode control.
Comparative results in Table 2 once more demonstrate better performance of the proposed advanced EAFSMC in comparison with the FSMC by Chang 27 and/or the hybrid fuzzy CMAC-SMC used by Shi and Shen. 28
Conclusions
In this article, a novel EAFSMC algorithm is introduced and applied to a 2-DOF serial PAM robot system. The proposed adaptive fuzzy EAFSMC algorithm introduces a new indirect adaptive fuzzy EAFSMC algorithm which successfully identifies the dynamic and cross-coupled features of the serial PAM robot. The convergence and the stability of the proposed EAFSMC method for the 2-DOF serial PAM robot have also been successfully demonstrated based on the Lyapunov stability principle. The comparative results clearly demonstrate the effectiveness of the obtained results, in particular, compared with existing works in the literature.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was fully funded by Vietnam National University HoChiMinh City (VNU-HCM) under grant number C2018-20-07.