
Abstract
This article investigates the synchronization problem of robotic teleoperation systems by developing a novel event-triggered networking strategy. Furthermore, the randomly occurring controller gain fluctuations are considered for the robotic teleoperation systems, such that more robustness can be obtained in the controller implementation. Based on model transformation, sufficient synchronization conditions are derived by employing the Lyapunov–Krasovskii method. Then, distributed controllers are designed for achieving the mean square synchronization. Finally, the effectiveness and feasibility of our proposed control strategy are demonstrated by an illustrative example.
Keywords
Introduction
In the past decade, robotic teleoperation systems (RTSs) have received increasing attention due to the urgent demand in both civil and military applications, such as remote surgery, 1 rescuing in hostile zones, 2 exploration in unknown environments, 3 and so on. 4 –6 RTSs are typically composed of a master system (MS) with the human operator and the corresponding slave systems (SSs), where the information can be exchanged via the communication network. A basic function of RTS is achieving the synchronization, which means that the SS can track the motion of the MS controlled by the human operator. To deal with this issue, many effective control approaches have been reported (see, e.g.,refs 7 –9 and the references therein). It should be pointed out that the communication network has played a key role for successful synchronization. However, it is well known that the communication networks are with certain constraints, such as limited transmission speed, stability, network bandwidth, and so on. 10 –13 As a result, these constraints should be addressed for the analysis and design of RTSs.
Recently, many researchers have intensively investigated the so-called event-triggered networked control systems and related results have been proposed following this research line. Different from traditional control strategy, the event-triggered strategy can obtain benefits in increasing the robustness and reliability of signal transmission and decreasing the network load. 14 –16 Among many event-triggered control strategies, discrete-time event-triggered approach is designed, 17,18 where the computing and networking resources can be utilized more effectively without relying on continuous-time monitoring the event-triggered conditions. Although the usefulness of event-triggered control approaches has been proved in many open literature, so far, there are few results on the event-triggered synchronization problem of RTSs, which is a challenging issue.
On another research frontline, it is noteworthy that the controller parameter perturbations in the real-world implementation could decrease the closed-loop performance. 19 -22 These facts give rise to the so-called nonfragile control problem. As a result, some effective control method with regard to gain fluctuations have been developed. 23 –25 In addition, further studies have shown that the gain fluctuations often happen in a random way, 25,26 such that considering the randomly occurring gain fluctuations in design can lead to less conservatism. For the synchronization problem of RTSs in the realistic applications, the randomly occurring gain fluctuations of the synchronization controllers should be addressed to be more practical. Unfortunately, this problem still remains open.
The above considerations motivate us for the investigation on the event-triggered synchronization design of RTSs with distributed information exchanges. In comparison with the existing results, the main contributions of this article can be summarized as twofold: (i) A novel asynchronous event-triggered networking strategy is developed for the communication of the MS and multi-SSs, where discrete-time measurement is introduced and event-triggered transmission is adopted. (ii) The developed synchronization controllers are in distributed configuration with nonfragile properties. The random model obeying the Bernoulli distribution is used for characterizing the randomly occurring controller gain fluctuations.
The remainder of this arranged is arranged as follows. Some preliminaries on the algebraic graph basics and the RTS dynamics are first introduced. Then, the event-triggered synchronization controllers are designed, and the corresponding sufficient synchronization conditions are established in the mean square sense. Furthermore, we give the simulation results to demonstrate the effectiveness of our developed methods. In the end, the conclusion and discussions are given.
Preliminaries and problem formulation
Algebraic graph basics
For representing the teleoperation communication, the undirected graph

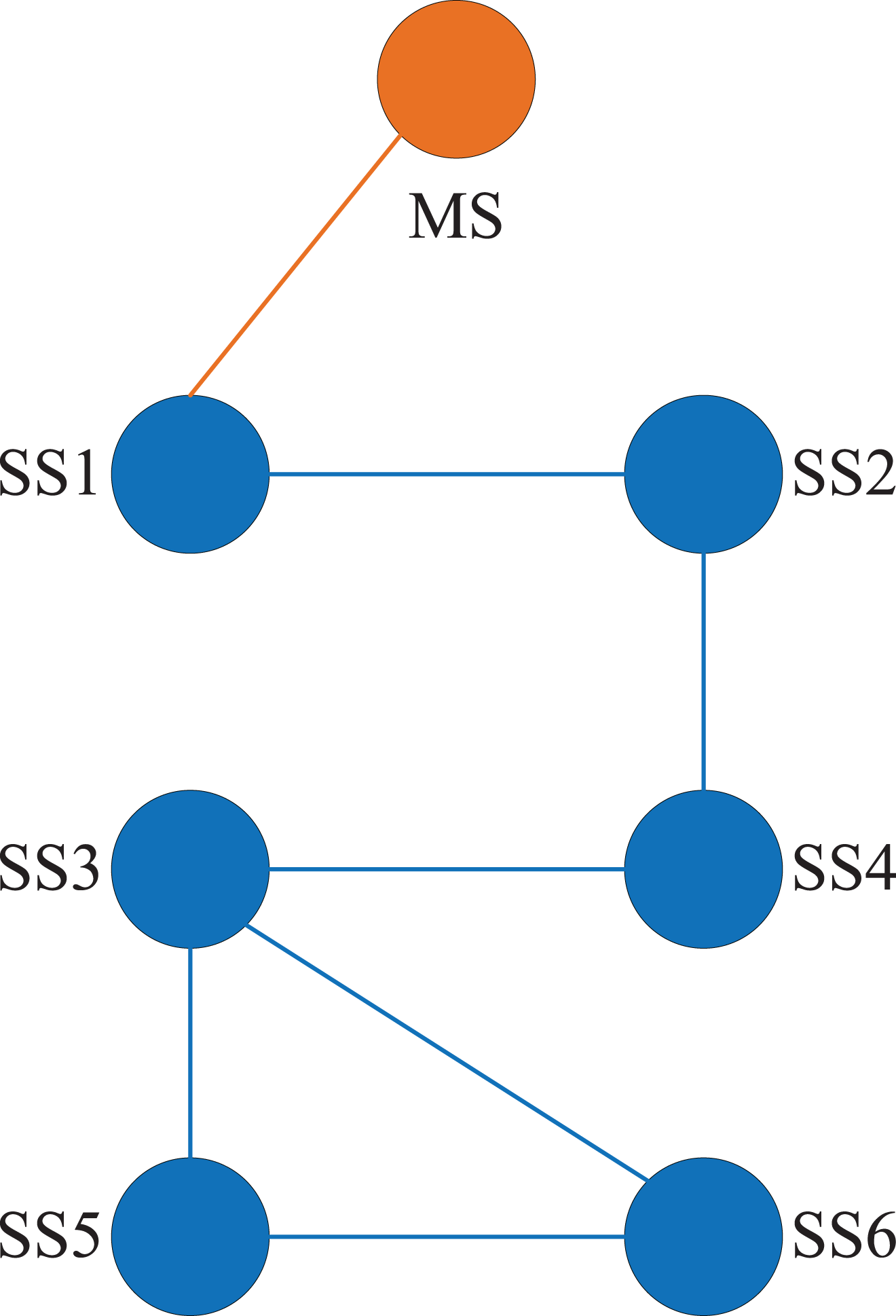
An illustration of the communication graph of 1 MS and 6 SSs, where the lines between the nodes denote the communication connections of the RTS, respectively


Robotic teleoperation systems
For the sake of simplicity, consider the following RTS with 1 MS and N SSs with one degree-of-freedom 27 :

where J denotes the inertia, θi denotes the rotate angle, b denotes the viscous fiction coefficient, and τi(t) denotes the control torque.
System (4) can be rewritten in state-space formulation as follows:

where

Then, by applying the same multi-agent framework in the work by Rakkiyappan et al., 28 system (5) can be further described in a general framework:

Hence, it can be verified that the synchronization is achieved if
The aim of this article is to design event-triggered controllers for RTS (equation (4)) such that the synchronization teleoperation can be achieved.
Event-triggered synchronization controller
Assume that the controller and the actuator are event driven. For the time-driven sampler, the sampling period is set as h. In order to trigger the transmissions, the following function is introduced:


where
Remark 1. In the proposed asynchronous event-triggered networking strategy, once the triggering function is satisfied, the neighboring SSs and the MS would exchange the information to the local SS.
Consequently, the synchronization controllers for multi-SSs are designed by
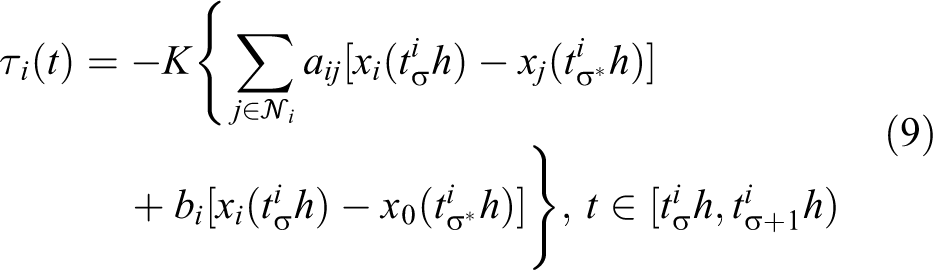
where K denotes the controller gain.
Due to the randomly occurring controller gain fluctuations, the synchronization inputs are rewritten as
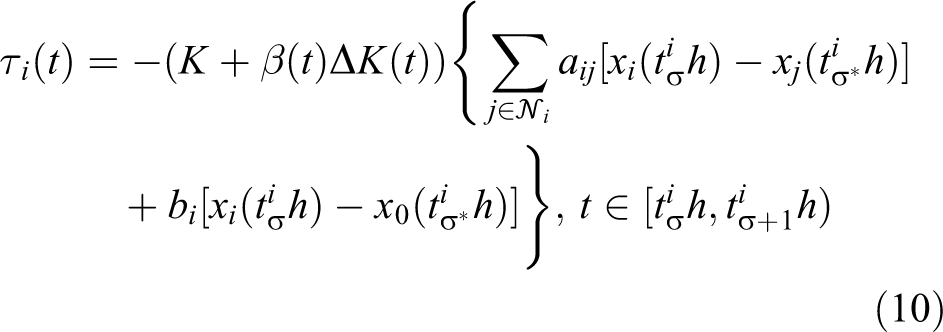
where

Moreover, assume that


Remark 2. As Bernoulli distribution has been well utilized to represent the randomly occurring phenomenon in control systems, the Bernoulli distribution is adopted to describe the randomly occurring controller gain fluctuation. Moreover, in order to use the convex optimization method for solving the controller design problem in terms of linear matrix inequalities,
Define

The following lemma is needed for later use.
Lemma 1.
29
Given LT = L, real matrices H, E and F(t) satisfying
Main results
In this section, sufficient mean square synchronization criteria will be established by the linear matrix inequality technic.
Theorem 1. With the event-triggered control input (equation (10)) and connected







Proof. For

where
Choose the following Lyapunov–Krasovskii function:

Define the infinitesimal operator

It yields that

Note that

where



Moreover, one obtains from equation (7) that
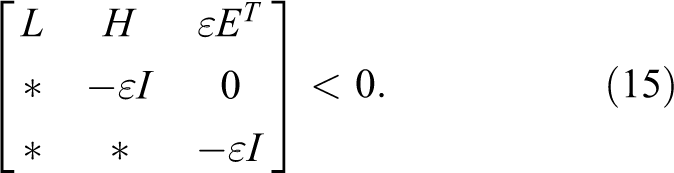
Hence, by Schur complement, one has if










By

where




Consequently, it can be obtained by Lemma 1 that Π < 0 holds and completes the proof.
Remark 3. It is noteworthy that the developed results of event-triggering networking strategy can be extended to the so-called leader–follower consensus problem of multiagent systems. 28,30
By Theorem 1, the following Theorem is given to deal with the synchronization controller design problem.
Theorem 2. With the event-triggered control input (equation (10)) and connected







The synchronization controller gains can be obtained by
Proof. Let
Noting that
Remark 4. The established conditions in Theorems 1 and 2 are in the form of strict linear matrix inequalities, which can be easily solved by Matlab or YALMIP. These positive symmetric matrices should be chosen appropriately to ensure that the conditions have feasible solutions. For practical applications, once the state-space equations can be obtained, then by solving the given conditions, the controller gain can be determined accordingly.
Illustrative example
In this section, simulation results are provided to show the effectiveness of our derived results.
Consider the RTS (equation (4)) with the following parameters as J = 10 kgm2 and b = 4 Nms/rad.
Moreover, the Laplacian matrix of the communication topology is assumed to be

The controller gain fluctuations are set as follows:

Ψ(t) being Perlin noise (persistence: 0.25, octaves: 6) and
Choose the sampling period h = 0.2 s, the parameter ε = 0.02 and the parameter ε = 1. With the above parameters, the synchronization controller gain can be solved by Theorem 2 as
By setting random initial conditions, the closed-loop dynamics of the RTS (equation (4)) with event-triggered scheme are depicted in Figure 2(a). It can be seen that all the SSs can track the rotate angle and the rotate angle velocity of the MS effectively, which means that the synchronization can be well achieved with our designed controllers and demonstrates our theoretical results. In addition, the closed-loop dynamics of the traditional time-triggered case with the same sampling period h = 0.2 s is also presented in Figure 2(b). It can be found that in the time-triggered case, the synchronization can be achieved a bit faster than the event-triggered case since there are more information exchanges of the RTS. However, by the corresponding broadcasting instants and release intervals shown in Figure 3, the event-triggered case can effectively reduce the information exchanges with less communications, such that the communication burden of the network can be considerably reduced with advantage. In practical applications, this trade-off of the synchronization time and the communication burden can be considered according to the design requirement by adjusting the event-triggered networking function.
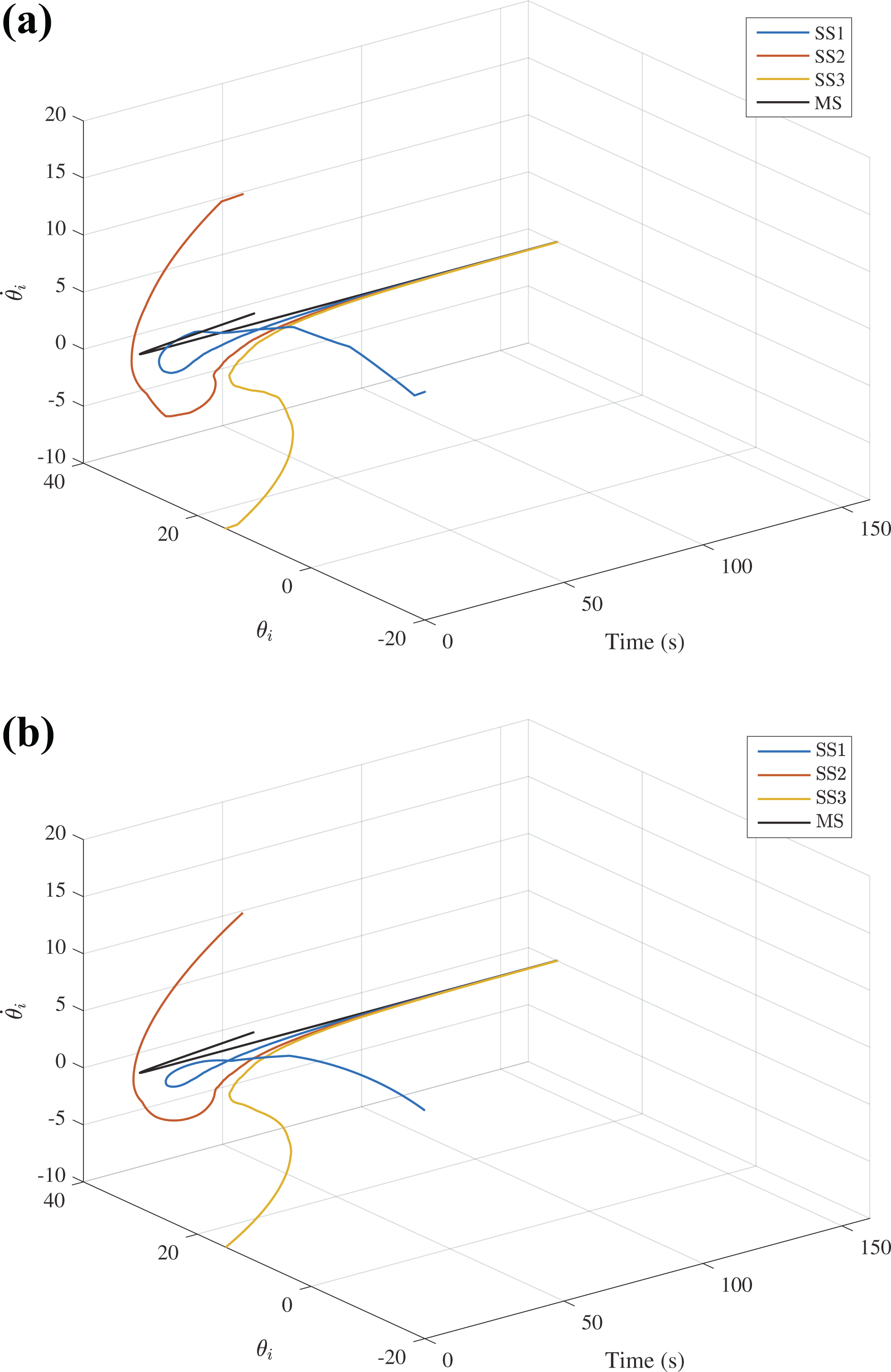
Comparison results of our proposed event-triggered scheme and the common time-triggered scheme. (a) The dynamics of the MS and SSs with event-triggered scheme and (b) The dynamics of the MS and SSs with time-triggered scheme.

Broadcasting instants and release intervals of the SSs: (a) SS1, (b) SS2, and (c) SS3.
Conclusion and discussions
In this article, the asynchronous event-triggered synchronization problem of robotic teleoperation systems is studied with gain fluctuations. In particular, a Bernoulli distributed variable is introduced to describe the randomly occurring gain fluctuations. By model transformation and applying the stochastic analysis, sufficient conditions are established based on Lyapunov–Krasovskii functionals such that the synchronization can be achieved in the mean square sense. Then, the related synchronization controllers are designed with the help of linear matrix inequalities. In the end, the effectiveness of our proposed control method is validated via the provided numerical simulations. In comparison with common time-triggered schemes, our proposed event-triggered synchronization scheme can effectively reduce the information exchanges among the RTS. Our future work encompasses investigating the cases with force reflection, which is more applicable for implementations.
Footnotes
Acknowledgements
The authors are grateful to the editor and reviewers for their valuable suggestions which improved this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Fundamental Research Funds for the Central Universities under Grant FRF-TP-15-115A1 and the National Natural Science Foundation of China under Grant 61703038, 61627808.