
Abstract
As a class of autonomous deep-space exploration robots, Mars lander is simultaneously affected by wind disturbance and actuator fault, which hinders precise landing on Mars. In this article, we propose a composite guidance approach by combining disturbance observer and iterative learning observer together. The Mars wind disturbance is dealt by the disturbance observer providing wind estimation which is rejected through feed-forward channel. Meanwhile, the iterative learning observer is used to estimate the deficiency of actuators. The proposed guidance scheme ensures not only the precision but also the reliability of the Mars guidance system. The stability of the closed-loop system is analyzed. Simulations made in different situations demonstrate the performance of the proposed approach.
Keywords
Introduction
Powered descent phase is the final regulation phase in Mars landing tasks. 1,2 Unfortunately, landers will inevitably face Mars wind disturbance, which may result in far range away from the prespecified landing point, sometimes it even causes a crush into the ground. 3 –5 Besides, the Mars landing mission needs to endure a long stage including launching from the earth, in-orbit flying, and landing. Therefore, landers will probably occur fault which leads to the safety problem of landers. 6,7 Reviewing the past 46 Mars exploration missions since 1960, only eight landing missions were successfully achieved due to the strong impact of disturbance and fault during the Mars landing process. 8,9 Overall, improving the precision and reliability of Mars landers is a key issue that needs to be addressed.
Considering dynamics and constraints of the spacecraft guidance system, Apollo guidance approach gives a comprehensive reference trajectory satisfying mission requirements. A simple guidance framework is then set up to cancel the tracking error preserving the nominal performance. With the advantage of low calculation cost and parameters preassigned, the guidance technique of Apollo has been successfully applied in Lunar and Mars space exploration missions since 1970s. 10 –12 Gradually, based on the Apollo method and its extension, a great deal of attention has been focused on the guidance problem using zero-effort-miss/zero-effort-velocity theory, optimal nonlinear feedback guidance algorithm, and sliding mode guidance approach during Mars landing process. 13 –17 Nevertheless, most studies ignore the effect of disturbances or just regard the disturbance as a norm bounded vector. Abandoning the prior information or not using measurable signals will bring great conservativeness to the system. Consequently, landers may consume extra energy when coming into unexpected disturbances during the landing process. Recently, anti-disturbance control theory is widely applied due to its advantage of achieving a better performance by fully making use of attainable disturbance information. 18 –21 The essential virtue of the anti-disturbance control has been introduced into the Mars landing problem to improve the anti-disturbance performance of landing system. 22,23
Although guidance command is calculated to improve the precision of landers, unresolved actuator fault or deficiency issues still limit the ability of safely delivering the Mars lander to the prescribed landing point. Until now, some effective active and passive tolerant control methods have been provided to solve fault problems like partial loss of actuator effectiveness, saturation constraints, control allocation, and controller degradation. 24 –29 Recently, intelligent methods including adaptive-proportional integral derivative (PID) control, fuzzy control, and iterative learning observer (ILO)-based control have gradually come into attention. 30 –33 Benefiting from its “smart” construction, intelligent methods achieve a desirable performance of ensuring the reliability of spacecraft.
However, when disturbance and fault coexist, it is not enough to just handle one aspect of the problem by using traditional methods. Meanwhile, few literatures consider the additive wind disturbance and multiplicative actuator fault problem on Mars precision landing. Motivated by this problem, a novel anti-disturbance guidance method integrating disturbance observer (DO) with ILO is proposed to simultaneously improve the landing accuracy and ensure the performance of reliability.
The main contributions of this article can be summarized as follows: (1) the powered descent guidance model has been established, considering the concurrence of wind disturbance and actuator fault problem; (2) compensating the effect of wind disturbance and autonomously healing actuators fault, DO and ILO are combined to achieve a high precision and safe landing; and (3) the closed-loop landing guidance system has been analyzed to guarantee the stability of the proposed approach.
This article is organized as follows. In the “Problem description” section, the guidance system model is given and the problem is formulated. In the “Composite guidance scheme design” section, ILO is designed under disturbance affecting to deal with the time-varying actuators inefficiency; DO is constructed for the purpose of rejecting the effect of Mars wind; the Apollo-based guidance law combining the estimation of ILO and DO is then described. The closed-loop system stability is analyzed in the “Stability analysis” section. In the “Illustrative examples” section, the proposed approach is simulated on Mars lander guidance system and, in addition, comparisons are made between different situations. Finally, the “Conclusion” section gives a total conclusion to this article.
Problem description
Consider the following Mars lander system during powered descent phase

where rL ∈ ℜ3 and vL ∈ ℜ3 represent lander’s positions and velocities, respectively, H 0 ∈ ℜ3 × 3 is given system matrix, ua ∈ ℜ3 is the control input, d(t) ∈ ℜ3 is the disturbance acceleration from Mars wind, 3 –5,22 and f 1(vL (t), t) is nonlinear function corresponding to the Mars angle rotating velocity which is supposed to be known and satisfies bounded condition described in Assumption A.1. Here, f 1(vL (t), t) = 2ω × vL + ω × ω × rL + g(rL ), where ω denotes the rotation angular velocity of the Mars, vL and rL denote the velocity and position of the Mars lander, respectively, and g(vL ) denotes the gravity vector.
Assumption A.1
For any vL ∈ ℜ3, nonlinear function f 1(vL (t), t) satisfies

where U 1 is given constant weighting matrix.
The lander guidance system is fully operated in the condition that all actuators perform well. However, considering long-time flying and fiercely conflicting with atmosphere, actuators usually work with loss of effectiveness, representing by constant or time-varying loss of the command signal. F(t) ∈ ℜ3 × 3 is adopted to represent the deficiency of each actuator. It needs to be pointed out that 0 < F(t) ≤ 1 not including actuators totally broken issue. Then the actual input signal can be described as

The control input considered here also has its saturation action ability, representing by |u| ≤ u max. Here, the unknown disturbance d(t) has to be noticed. Considering the collected information of Mars surface, the Mars wind is a crucial affecting factor during the powered descent phase. Here, the wind disturbance is supposed to be generated by an external generated system. Then the formulation below is adopted 22

where w(t) ∈ ℜ2 is the disturbance state and W ∈ ℜ2 × 2 and V ∈ ℜ3 × 2 are given known matrices. Because of the unknown initial values of equation (4), the disturbance is unpredictable to the guidance system.
Then converting equation (1) into state-space representation with equation (3), we can get

where x(t) = [rL vL
]
T
,
Remark 1
Different from the previous works, 22,33 there are both additive modeled uncertainty d(t) and multiplicative one F(t) in the established model. Therefore, traditional approaches give single consideration to either additive term or multiplicative variable, which is not suitable for the wind disturbance and actuators fault coexisting problem.
Composite guidance scheme design
The purpose of the proposed composite guidance scheme is to simultaneously compensate the loss of the efficiency in actuators and cancel the effect of the wind disturbance. The composite guidance scheme contains two layers: The inner layer includes the DO estimating wind disturbance, ILO estimating loss of the efficiency, and the compensator in the feed-forward path; the outer layer includes the nominal guidance method with disturbance attenuation and precision requirement. The structure of the composite guidance scheme is shown in Figure 1. It needs to be pointed out that the minus sign in Figure 1 represents that the composite guidance scheme simultaneously rejects wind disturbance and compensates the loss of actuators in the feed-forward path. Therefore, both the ILO and the DO are designed at the same time. The ILO is first introduced followed by the DO.

Composite guidance scheme structure.
During powered descent phase of Mars landing, engine propelling is the major power whose precision directly decides the flight performance of landers. Because of the iterative updating law, the ILO costs less online computing power than other algorithms, which makes it a potential technique of engineering application prospect. 34 The objective of ILO design is to improve the reliability of guidance system by estimating the deficiency value of actuators which can be reconstructed by its estimation into dynamic equations.
At first, for calculation convenience, a transition can be made as follows 31

where ψ = diag(u
1, u
2, …, un
) and
The ILO is constructed as

where

The derivative of state estimation error can be also obtained

As in Zhang et al.,
33
the estimation of deficiency value
Followed by dealing with actuators fault, the wind disturbance is then handled through DO methodology. According to the wind disturbance modeled as equation (4), the DO can be constructed as

where L ∈ ℜ2 × 6 is the DO gain to be calculated. In order to ensure all states can be obtained, we use

For the purpose of proving estimated value can track actual disturbance, the estimation error is defined as

Remark 2
Different from previous studies, 33,34 the ILO equation (7) is constructed together with wind disturbance estimation provided by the DO due to the direct effect of wind disturbance. The import of disturbance estimation reduces the conservation of traditional ILOs. Similarly, the DO equation (11) takes actuators fault estimation into account which is different from the DO utilized by Guo and Wen 21 . The combination of ILO and DO simultaneously causes coupling problem of estimation performance, which is analyzed in the following section.
Finally, the composite guidance scheme is designed by infusing the reconstructed information of fault and disturbance estimation into the Apollo guidance law. The reference trajectory is not designed in this article using nominal condition curve instead. Therefore, the total guidance law applied to the system is given by

Substituting equation (12) into equation (4), we have

Considering the entire system equation (14) with ILO estimation error equation (8), state estimation error equation (9), and DO estimation error equation (12), the state can converge to a small set containing the origin by the analysis in the following section.
Stability analysis
The stability of the guidance system under the proposed composite scheme is guaranteed by Theorem 1, which is described as follows.
Theorem 1
Consider system equation (14) together with equations (9) and (12), if there exists positive matrices P > 0, Q > 0, M, N, and R > 0 satisfying

where



then the closed-loop system with gain LH = R −1 N and HK = P −1 M such that equation (14) together with equations (8), (9), and (12) is bounded stable.
Proof
We choose a Lyapunov function as

where



According to equations (8), (12), and (14), the derivative of equation (13) can be deduced as follows
let EF (t)u = σ, then we can show that

Let u max represents the max value of control input, then we can have

where

It can be seen that
Illustrative examples
In this article, the powered descent guidance model used in the simulations is similar to those in other studies 16,35 and is representative of the Mars Science Laboratory lander. The simulation parameters adopted are shown in Table 1.
Mars lander initial and terminal simulation parameters.
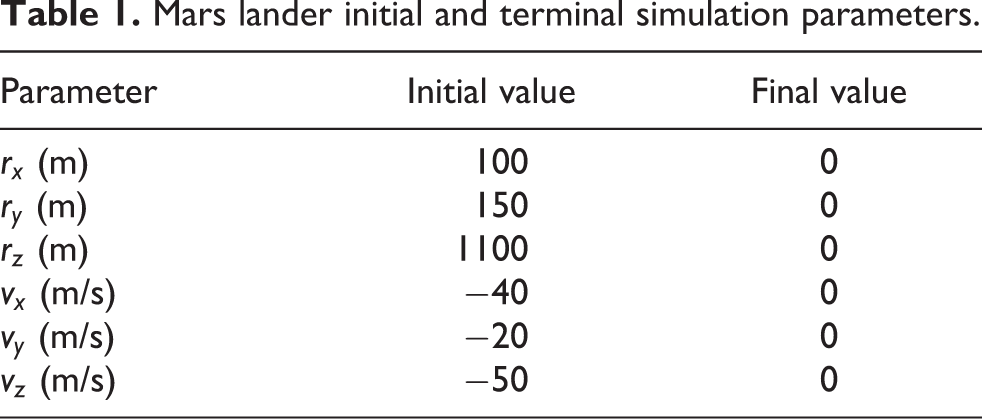
The mass of Mars lander is approximately 1905 kg. The wind disturbance functioning on Mars lander is considered to be about 380–760 N and is transformed to 0.2–0.4 m/s acceleration disturbance d(t) in the channel of control input. The control input is constructed by eight power engines symmetrically installed around the lander with maximum propelling of 3000 N for each power engine, which representing by u max = 10.4 m/s2. As the lander is approaching near enough to the Mars surface, the Mars angle rotating velocity here is ignored. Due to the requirement of pinpoint soft landing, the Mars lander needs to touch the surface of Mars with the vertical velocity < 0.75 m/s. Meanwhile, under the precondition of safety, the lander is better to be sent nearer to the target point. The performance of the proposed guidance method is verified by comparing the Apollo guidance method which is already applied in the previous Mars landing missions together with Apollo guidance combined with DO (Apollo+DO) and Apollo guidance combined with ILO (Apollo+ILO). Simulations are driven by different occasions that fault simultaneously occurring combined with wind disturbance cases.
In simulation, the three-axis fault scenario



is introduced to the power engine propelling and the signal(t) is an aperiodic signal. G = 250I 3, γ 1 = 1, and γ 2 = 20 are parameters for the iterative observer equation (7)


The DO and controller gains are using parameters in equations (20) and (21).
Figure 2 shows the fault estimation in Apollo+ILO and proposed method. It can easily be seen that without the function of DO, the fault estimation has been affected. Figure 3 shows the wind disturbance estimation performance is also inaccurate by just using DO.

Deficiency histories for different methods.
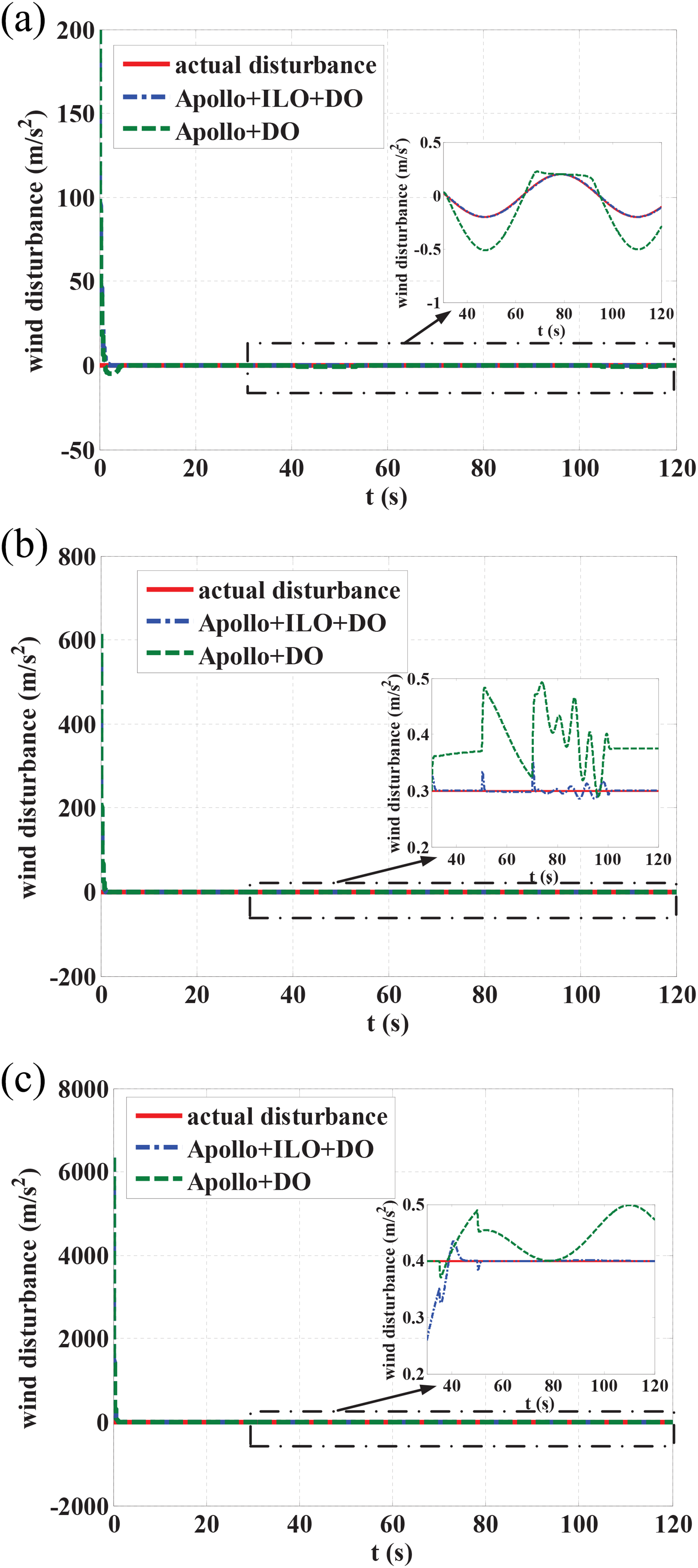
Wind disturbance histories for different methods.
Remark 3
The simulation result in Figure 3 indicates that the performance of single observer approach is worse than that of the baseline Apollo guidance method. The reason is that the estimation is bigger than the actual disturbance, which causes a heavier damage to the system.
Figure 4 shows the height and the vertical velocity of the lander under. As can be seen from the pink line, as the fault estimation is bigger than actual fault value, the lander gives less propulsion than it actually requires, which leads to an early touch with high velocity. Similarly, the lander cannot satisfy the demand for touching the Mars surface. As can be seen from Figure 2(a) that, under case 1, using the Apollo guidance method the lander touches surface at t 1 and the velocity is > 0.75 m/s which is not satisfying the requirement of pinpoint soft landing. Horizontal position and velocity of lander are shown in Figures 5 and 6. It also can be seen that the final position is not satisfiable. The final precision of different methods is demonstrated in Table. 2; it can be seen that the proposed guidance scheme is effectiveness dealing with wind disturbance and loss of efficiency. The sign of parameters here is set to be negative according to the landing descent mission as height and velocity are decreasing.

Z-axis position and velocity histories for different methods.

X-axis position histories for different methods.

Y-axis position histories for different methods.
The terminal precision (rz = 0 m) of Mars lander using different methods with the condition.

DO: disturbance observer; ILO: iterative learning observer.
Conclusion
This article has proposed a novel composite guidance method for powered decent phase of precise landing on Mars subject to wind disturbance and deficiency of actuators. The adoption of the learning mechanism promotes the ILO dealing with multiplicative time-varying fault formations more than constant ones. The DO is utilized to estimate and reject the additive influence of the wind disturbance. The combination of two techniques provides the solution to resolve disturbance term and actuators fault coexisting problem. The results show that with the proposed method, the guidance system can achieve a better performance against the disturbance and time-varying actuator faults. The technique developed in this article has the potential to be an intelligent (learning ability) guidance method for future high-precision and high-reliability Mars lander.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant numbers 61627810, 61320106010, 61633003, 61661136007 and 61603021), the Program for Changjiang Scholars and Innovative Research Team (grant number IRT 16R03) and Innovative Research Team of National Natural Science Foundation of China (grant number 61421063).