
Abstract
In this article, an adaptive coordinated tracking control problem for a group of nonholonomic chained systems has been discussed under the assumption that the desired trajectory is available only to a part of neighboring agents. Firstly, coordinated tracking controllers under the directed communication topology graph containing a spanning tree are designed for two subsystems, adaptive control gains are employed in the linear subsystem based on the state information of neighboring agents, then the global information of the topology graph is not required to be known in the control laws. Furthermore, the backstepping strategy is applied in the rest of chained-form subsystem such that the state of all robots converge to the desired reference trajectory. And then, the results are further evolved with the case of switching topology. Finally, an application is introduced and the simulation results are given to show the validity of the proposed theoretical results.
Introduction
With the rapid development of distributed computing technology and modern control theory, distributed cooperative control of multi-agent systems has caused researchers’ tremendous attentions in the last few years. This research direction includes consensus, formation, rendezvous, containment, and tracking control. 1 These problems have been discussed in pioneering works via different control strategies, such as leader–follower, 2 virtual structure, 3 behavior-based, 4 and graph theory methods. 5 Obviously, the topic of coordinated tracking has a wide range of applications in engineering and physics, such as tracking control of mobile robots, satellites clustering, unmanned helicopter, and autonomous underwater vehicles. 6 –8
The main objective of coordinated tracking control is to make a group of autonomous vehicles to track a target in a cooperative manner via distributed control protocols such that some challenging tasks can be completed and many inevitable physical constraints including sensor ranging are removed. Hence, this distributed control behavior not only reduces the operational costs but also improves the robustness and adaptivity of the systems. In most of the previous technical notes concerned with decentralized control, the coordinated control problem of multi-agent systems which are usually considered as linear dynamic systems has been studied by many researchers. 9 In the study by Qu et al., 10 by the use of matrix theory, a sufficient and necessary condition is given to guarantee the convergence of the closed-loop system. Two different distributed tracking controllers for linear dynamic systems in the study by Li et al. 11 are proposed to guarantee that the states reach an agreement. Ni and Cheng 12 considered leader-following consensus problem of high-order linear systems, the Lyapunov inequality and Riccati inequality are introduced to solve the consensus problem.
In practical applications, the practical physical model cannot be described by the linear model, and the most practical model may be nonlinear model. Moreover, most of the mobile models have to satisfy nonholonomic constraints. The design of control laws for nonholonomic systems is involved, mainly due to Brockett’s condition which indicates that continuous pure state feedback law is not applied. Therefore, when agents with nonholonomic constraint are considered, the coordinated tracking control problem becomes more challenging. Some proposed effective control strategies, such as time varying, 13 discontinuous feedback, 14 and hybrid control method, 15 establish the foundation for our further study. The distributed tracking controller is designed in the study by Yang et al. 16 with the aid of the dynamic oscillator strategy. In the study by Dong, 17 the state of each follower converges to the leader by utilizing the adaptive control technique. Some other methods including small gain and dynamic feedback linearization are employed in the study by Liu and Jiang 18 to deal with the formation problem of nonholonomic mobile robots. Cao et al. 19 also considered the consensus problem of high-order chained-form systems, the cascading theory is applied to construct hybrid distributed controllers. In the studies by Peng et al. 20 and Qiu et al., 21 distributed adaptive controller is designed to steer a class of mobile robots to achieve a prespecified geometric pattern and track a reference trajectory. Xu et al. 22 consider the output consensus of nonholonomic system, a time-varying control law is given to demonstrate the stability of the overall closed-loop system. However, for the tracking control problem in the study by Zhang et al. 9 , and Ni and Cheng, 12 the input information of a reference trajectory is either available to all the other neighboring agents or equal to zero, which is impractical and restrictive due to the constraints of large scale of network. All the above studies 13 –22 consider the nonholonomic chained-form system, then the global information of the communication topology graph is required to be known.
Motivated by the previous studies and investigations on coordinated tracking control of multiple mobile robots, the distributed coordinated tracking problem for a group of nonholonomic chained systems is discussed in this article. Compared to the result in the study by Xu et al., 22 the contributions of this work are stated as follows. First, the time-varying control strategy is applied in the cooperative control law instead of strict time-invariant continuous feedback linear system. Second, the controllers are designed on the basis of the neighboring state information of the agent with the coupling adaptive gains. The global information of communication topology is not required to be known in the controllers. Furthermore, it is worth mentioning that the tracking problem is solved under a practical assumption that the information of the reference trajectory is available to a part of neighboring systems rather than all neighboring systems.
Preliminaries and problem statement
Graph theory and notations
In this article, the interconnection topology of multi-agent systems is modeled as a directed graph. The communication topology of the N agents can be described as the weighted graph
Throughout this article, the following notations are used. 1
N
represents a column vector with all elements equal to one. For a vector
Assumption 1
Graph
Problem statement
Many kinematic systems in our life such as nonholonomic wheeled mobile robots can be transformed into chained form by coordinate transformation.
22
In this article, we consider a group of chained-form nonholonomic systems as follows

where
In chained-form systems, the formation tracking control problem is taken into consideration in this article. Assume that the desired reference trajectory
where
Assumption 2
The reference inputs
Let us define the tracking error as

The Coordinated Tracking Control Problem is to design the control laws u1i and u2i for each agent i,


Lemma 1
If graph
Controller design and convergence analysis
In this section, we will design a coordinated tracking controller under a directed communication topology containing directed spanning tree by two parts. In the first part, we add a new auxiliary variable in the traditional cooperative tracking control protocol instead of linear control strategy. An adaptive control law is also proposed for updating the linear subsystem gain. In the second part, the controller for the rest of system in chained form is constructed by the backstepping design method.
Control law design for the linear subsystem
Consider the linear subsystem in equation (1)

The control law u1i is designed by adopting the adaptive scheme for updating coupling gain and adding a new auxiliary variable in the traditional cooperative tracking protocol as follows



where
Theorem 1
For the system (6) with controller (7) to (9), if assumptions 1 and 2 hold, then we have
Proof
The closed-loop system can be written as in the following form


where


where L1
N
= 0 is applied. Choosing the following Lyapunov candidate function

where α is a positive constant. It is directly checked that V1 ≥ 0. Taking the time derivative of V1 along the solution of equation (14) as follows

In light of Lemma 1 in the study by Li et al.,
11
it yields that the matrix (L + C)2 is positive definite. Choosing α large enough such that

By noting that
Control law design for the remainder of chained-form subsystem
Noting that the remainder of chained-form subsystem in equation (1), the control law u2i is designed by utilizing the backstepping design method.
Theorem 2
Consider the rest of chained-form subsystem in equation (1), if assumptions 1 and 2 hold, then the coordinated tracking problem of chained-form subsystems is solved with the following controllers



where
Proof
Firstly, consider the error dynamic chained-form subsystem in equation (3)

In order to simplify the variables, we will omit partial second variable i of right subscript. Take

There exists a function to satisfy

which ensures the exponential stability of the subsystem (20). Obviously, as V2 decays with 2k1,
Secondly, we introduce the error variable


Similarly, regard

Using Lyapunov candidate function

In this step,
For all further steps, similarly introduce an error variable


Regard

Using Lyapunov candidate function

Using a similar method as before, choosing the parameter
Finally, in the last step, introduce an error variable


Choosing the Lyapunov candidate function

Let

Since L + C is positive definite matrix. Hence, we get
Remark 1
Compared to the static controller in the study by Li et al., 11 the proposed adaptive control law (7) to (9) does not need to calculate the minimal eigenvalue of L, then the global information of the topology graph is not required to be known. On the other hand, the coupling gains need to be dynamically updated in equations (7) to (9), implying that the adaptive control law (7) to (9) is more complex than the static controller.
Coordinated tracking for switching communication graph
In the preceding sections, the fix communication graph is considered, If the communication graph
Theorem 3
For the system (6) (1 ≤ i ≤ N) with controller (7) to (9), if the switching communication topology
Proof
In any time instant t, we have the following closed-loop systems


Choosing Lyapunov candidate function

And taking the time derivative of V1t along the solution of equation (31) with the aid of the equations (7) to (9). One gets

where α > 0, and
Theorem 4
Consider the remaining subsystem in equation (1) (1 ≤ i ≤ N), if the switching communication topology

where
Proof
Similar process of proof in Theorem 2, the variables
Remark 2
In control laws (7) and (16), aij and ci are control parameters. The parameter of the control law affects the convergence velocity of the system. Therefore, the convergence rate of
Applications
Tracking control of wheeled mobile robots has extensive application in cooperative transportation and target tracking. In this section, an application example is showed in formation control with a desired trajectory by converting the wheeled mobile robots into nonholonomic chained form and integrating with the proposed control laws.
Consider a group of N wheeled mobile robots to track a presupposed target in a plane. The kinematic model of each mobile indexed by i ∈ N is given as follows

where
The trajectory of tracked target

The position of desired formation is given by constant vectors
Control goals: Design coordinated tracking controllers for each robot, on the basis of neighboring state information and tracked trajectory information, such that the multi-robot system can obtain desired formation and track the desired trajectory. Therefore, coordinated tracking control goals can be rewritten as follows


For completing the above control goal, in this subsection, it is necessary to construct a new coordinate transformation as follows

In the same way, letting
The systems in equations (35) and (36) can transform into equations (1) and (2) with n = 3 through the coordinate transformation in equations (39) and (40). The following corollary can be easily derived through simple derivative and calculation to the above results, which the process of the proof is omitted here.
Corollary 1
By the changes of variables, the systems in equations (35) and (36) are converted to the nonholonomic chained system in equations (1) and (2) with n = 3, under theorems 1 and 2, the coordinated tracking can be achieved, that is
Numerical illustrations
To verify the effectiveness of proposed theoretical results, we give the corresponding value to carry on the simple simulation. Consider the example described in the above section. There exist five robots, and their desired trajectory coordinates are given by
Let the communication topology graph be shown in Figure 1. The coordinated tracking control can be achieved by corollary 1 combining with previous results in the section “ Controller design and convergence analysis.” The control parameters are selected as

The communication topology graph

The movement trajectories of five robots with a reference path.
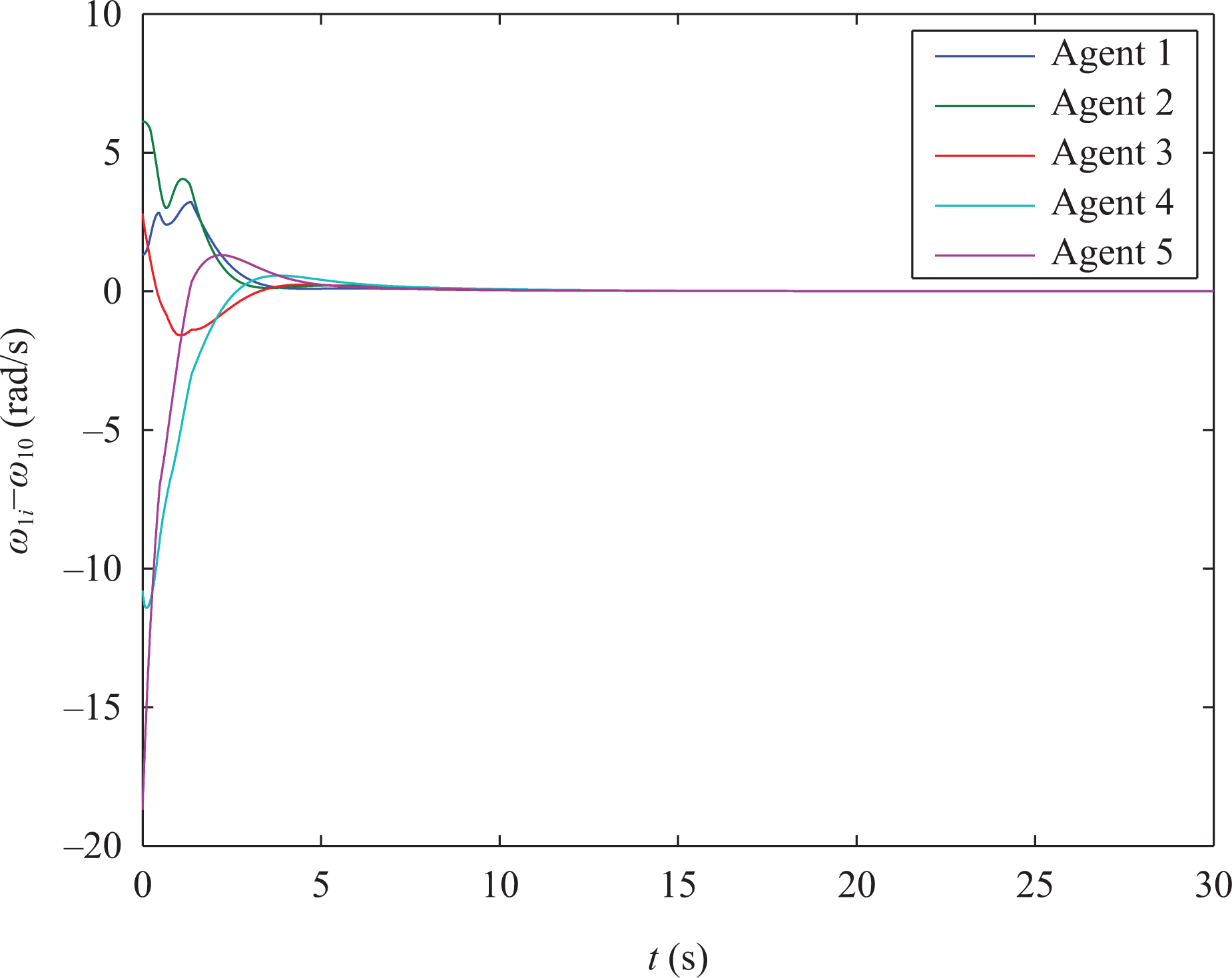
The angular velocity tracking error of five robots.

The state tracking errors of five robots.
If the communication topology graph is different in each time interval, the control laws are valid in theorem 3. Assume that the switching communication topology graph shown in Figures 1 and 5 satisfies the following rules

The communication topology graph
Figure 6 shows the formation trajectory of five robots with a tracked reference path for switching topology graph case. In the case of topology graph switching, Figures 7 and 8 show that the tracking error of angular velocity and three original states still converge to zero, which verifies the effectiveness of the proposed coordinated tacking control algorithm.

The movement trajectories of five robots with a reference path.

The angular velocity tracking error of five robots.

The state tracking errors of five robots.
Conclusions
In this article, the distributed adaptive coordinated tracking control problem for a group of nonholonomic chained systems has been discussed under the condition that the communication topology graph has a spanning tree. At least one of the agents can receive the state information of the desired reference trajectory whose control input is bounded. The design of control laws is divided by two parts. The control law of the linear subsystem is proposed with the aid of adaptive control method, and the control protocol of the remaining subsystem in chained form is addressed on the basis of the backstepping techniques. The state of each agent exponentially converges to the reference trajectory by the virtue of Lyapunov techniques, Barbalat’s Lemma and graph theory. Finally, the coordinated tracking controllers design is also investigated under the switching topology. Simulation results show the validity of the proposed controllers.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Nature Science Foundation under grants 61503329, 61573307, 61473249, and 61773335; Jiangsu Planned Projects for Postdoctoral Research Funds 1601024B; and the Natural Science Foundation of Jiangsu Province BK20171289.