
Abstract
Since dynamic model can be obtained through various approaches with certain different accuracies, the accuracy of model in simulation plant compared to reality is found to be influential but seldom concerned under robotic cooperation. This may result in acceptable simulation but unsatisfactory practical application. Based on different dynamics’ demands or accuracies, an inverse model-based backstepping sliding-mode controller and another model-free controller are derived using feedforward radial basis function neural networks to compensate the uncertain dynamics of the system. Model-based algorithm is found to provide much more satisfactory contribution than that of model free. Thus, a model weight is introduced to adjust contribution of inverse dynamics and neural compensation, and a novel model weighted adaptive neural backstepping sliding-mode controller is proposed to cope with different dynamics’ demands or accuracies. The neural networks require no off-line learning and it is shown that they can deal well with the dynamic uncertainty, joint friction, and external disturbances. With Lyapunov stability approach, these controllers are proved to be robust, both position/force convergence and tracking stability are guaranteed. Simulation and analysis indicate that these controllers provide good tracking performance in position and internal force. Moreover, the model weighted controller achieves better tracking accuracy and stability under various degrees of model errors.
Keywords
Introduction
Cooperative manipulators have been witnessing an increasing interest due to their versatility within robotic applications such as assembly of heavy objects, grasping, material handling, transporting, and so on; meanwhile, cooperative manipulation provides potential alternative, high productivity, and perhaps lower cost. However, it is much more coupled and extremely complicated to design a controller of a cooperative manipulation than that of a single one. The main problem is that, when cooperative manipulators hold a common object, as they have to stay in contact with the object while moving, a set of kinematic and dynamic constraints will be formed. As a result, undesired stress may occur. All the cooperated manipulators have to perform synchronously to track a desired trajectory of the object, which makes the control problem become further complex due to internal forces. Meanwhile, those internal forces contribute nothing to the motion of the object, also they should be fully and carefully controlled.
Control of manipulator cooperation has drawn the attention of lots of researchers. Yoshikawa and Nagai 1 proposed a new definition of grasping and manipulating forces for multifingered robot hands. Alford and Belyeu 2 designed a master–slave control scheme to enable two robot arms to function in a coordinated manner. Hybrid control method 3,4 addresses the motion and force control problem of multiple manipulators manipulating a cooperatively held object, controlling the force, and the position in desired directions. 5 Kleinfinger and Khalil 6 developed an algorithm for dynamic modeling of cooperative manipulators containing closed kinematic chains with the object being held. A distributed impedance controller 7 was proposed based on a realistic model of both robot impedance and object dynamics. The aforementioned schemes with nonadaptive mechanism are usually based on the complete knowledge of the system dynamics; however, besides complicated cooperation in practical, system uncertainties and external disturbances do exist.
As a result, lots of adaptive controllers were suggested. A decentralized continuous sliding proportional–integral–derivative (PID) controller 8 for tracking tasks with exponential convergence of tracking errors was proposed. A reduced order dynamics of manipulator system was derived, and an adaptive control scheme 9 that guaranteed the asymptotic convergence of the object’s position and the acting force to their desired values was achieved. Another adaptive and robust control method 10 was derived for handling an object by two-link planar robot manipulators ensuring a parameter adaptation satisfying the stability condition of uncertain systems. Gueaieb et al. 11 proposed a robust decentralized control scheme for the payload’s position/orientation as well as the internal forces control induced in cooperative multiple manipulator systems. Many other adaptive schemes can be seen in literature. 12 –14
Most of these kinds of adaptive schemes estimate plant’s physical parameters requiring certain knowledge of system dynamics, extensive system modeling, or preliminary regression computing. However, the knowledge focuses on structured uncertainties regardless of unstructured uncertainties and external disturbances. Recently, artificial intelligent algorithms (neural network (NN), fuzzy, etc.) have shown outstanding feasibility to compensate uncertainties or to develop model-free controllers. NN is known with strong ability to learn, distributed structure and highly nonlinear approximation, enables to approximate part of the robotic manipulator unknown dynamics. Karayiannidis et al. 15 proposed a novel neuro-adaptive controller which exploited the approximation capabilities of the linear in the weights, guaranteeing the uniform ultimate boundedness of force and position error. Cheng et al. 16 proposed an NN-based adaptive controller for the tracking of manipulators with uncertain kinematics, dynamics, and actuator model where did not need the “linearity-in-parameters” assumption for the uncertain terms in the dynamics. And more recently, He et al. 17 developed an adaptive impedance controller for an n-link robotic manipulator with input saturation by employing NNs. Li et al. 18 proposed a novel recurrent NN to resolve the redundancy of manipulators for efficient kinematic control in the presence of noises in a polynomial type. Pan et al. done a lot contributions 19 –23 to NN-based adaptive controllers. An NN-based adaptive controller 24 for a new deployable manipulator system which consisted of a deployable link and a slewing joint was presented. However, these NN adaptive controllers are most designed for single manipulator situation.
As for the case of multiple manipulators, NN-based scheme is seldom found in the literature. Some neural controllers are trained off-line 25 ; however, such controllers lack online adaptation capability for changing dynamics or disturbances. Meanwhile, others with online adaptation, Hou et al. 26 applied a dual NNs approach to resolve the coordination problem of two redundant robots. Panwar et al. 27 developed an adaptive neural controller for cooperative manipulator system manipulating a common rigid object, where no preliminary off-line learning was required. More studies with online neural learning and adaptation can be found elsewhere. 28 –30 Besides, radial basis function (RBF) NN–enhanced estimator and observer were developed 31,32 to estimate system uncertainty and obtain the leader manipulator’s acceleration and control torque online. As for sliding-mode controllers, Wang et al. 33 proposed a decentralized position synchronized force control scheme. Incremona et al. 34 proposed a modular and composable approach, including a supervisor and a couple of hybrid position/force control schemes associated with a couple of cooperative robotic manipulators. Some researchers 35 focused on the equations, drawbacks, and the modeling of the leader–follower formation scheme for multirobot systems with uncertainties.
Look through the literature, some advances have done much work, but there still exist some improvements to make: Dynamic uncertainty and unknown disturbances: Most of the cooperative manipulator controllers aforementioned rely on knowledge of local manipulators themselves, as well as other cooperated ones. This knowledge includes but not limited to nonlocal dynamic uncertainties of other manipulators, not to mention nonlocal unknown external disturbances. Model-based control and estimating compensation to internal force regulation: Model-based (inverse dynamics) algorithm and approximating (of such inverse dynamics) algorithm are usually adopted in controller design, but which single part contributes more effectively to internal force regulation is seldom concerned. Despite the similar architecture in other single robotic applications, the contribution adjustment becomes uncertain and more complicated because of internal force. Dynamic model error between simulating plant and practical application: The dynamic accuracy from simulating plant to reality differs with different approaches, for example, calculation (Lagrangian method), adequate 3-D modeling, and physical measurement, which is rarely considered and thus discussed as pseudo-model later. While most studies ignore the difference of simulating plant compared to practical application, which is here referred by a model weight, thus more problems may occur in practical application.
In this study, we aim at a decentralized control scheme to achieve internal force regulation, meanwhile with less nonlocal uncertainties than centralized design. A model-based neural backstepping sliding-mode controller together with a model-free neural backstepping sliding-mode controller is developed to cope with issues 1 and 2. Furthermore, integrating the former controllers, a novel model weighted controller is proposed to adjust contribution of inverse dynamics and neural compensation, which can cope with different dynamics’ demands or accuracies. Feedforward RBF NNs are adopted to deal with joint friction, external disturbances, as well as dynamic error between control loop and simulating plant, and so on.
The rest of the article is organized as follows. The “Kinematics and dynamics of cooperative manipulator system” section outlines the dynamic and kinematic modeling features of cooperative manipulators with the object and derives an integrated dynamic model. In the “Feedforward RBF neural network (FFNN)” section, a brief review of feedforward RBF NN is given. Several adaptive neural backstepping sliding-mode controllers are designed, and pseudo-model is discussed and then model weighted controller is introduced in the “Design of model weighted neural backstepping sliding-mode controller” section. The performance with numerical simulation of two 3 degree-of-freedom (DOF) manipulators holding a rigid object is presented comparatively in the “Simulation and discussion” section and finally conclusion is discussed in the last section.
Kinematics and dynamics of cooperative manipulator system
Consider a system of m cooperative manipulators, each end-effector holds a common rigid object at certain point as shown in Figure 1. All cooperative manipulators must be controlled carefully to move the object to
keep its center of mass tracking a predefined trajectory under joint friction and external disturbances; regulate the internal forces to desired values to prevent damage.
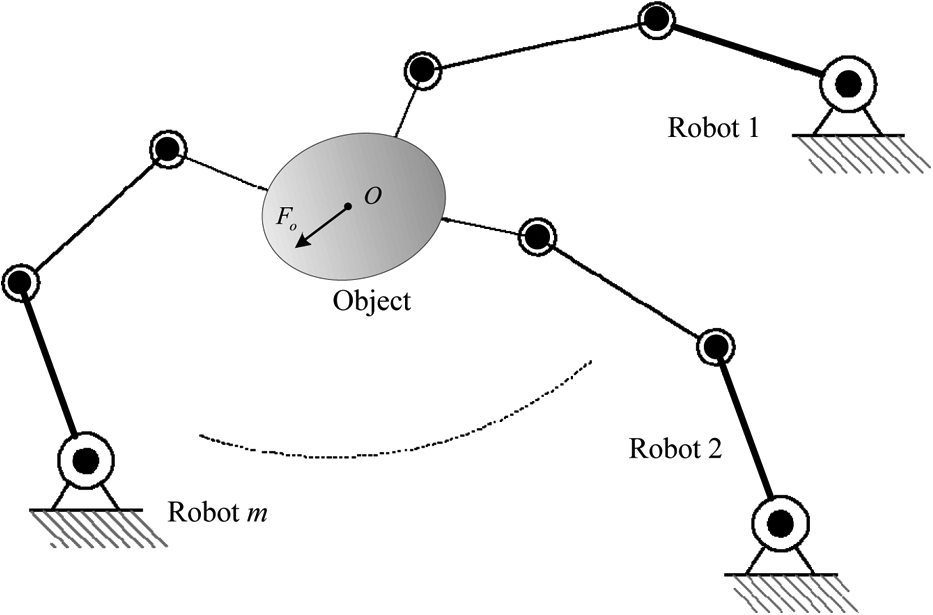
Cooperative manipulators holding a rigid object.
In order not to increase the system’s DOFs, we will assume that cooperative grasp state is always guaranteed and the object is rigidly grasped by the end-effectors, meaning there is no relative motion between the end-effectors and the object. Also, the manipulators’ forward kinematics are supposed to be known.
Kinematics
The forward kinematics p can be expressed as

where


where superscripts
Dynamics
The dynamic equation of the i th manipulator in the robotic system in joint space is given
36
as

where τi denotes the joint torque/force applied by the actuators on the i th manipulator,
Based on Wang et al.,
33
we take advantage of the cooperative relations in the following and then build the system dynamic equation. The dynamic model of the grasped object is given as

where Mo(p),

where

Also it is obtained that

And Ei can be expressed as

where positive-definite diagonal matrix ϖi(t) can be regarded as time independent, representing the load distribution of the object onto the ith manipulator.
37
Substituting equation (9) into equation (7) yields

Using equation (10) alone with equations (2)–(4) and (6), for simplicity let

Feedforward RBF neural network (FFNN)
FFNN can adjust local weights and offer mathematical tractability. An FFNN with hn hidden units can be described as

where Y is the output determined by the input X. ψ(X) are the RBF as


where ci represents the center and bi represents the width.
Assumption 1
There exists an ideal tracking of a continuous output Y for an object Yideal, that with a very small compact set range ε0

where

where
Then FFNN can show arbitrary precise tracking capability for continuous function 38 under assumption 1.
Design of model weighted neural backstepping sliding-mode controller
Backstepping method decomposes complex nonlinear manipulator system to subsystems without exceeding the system order, separately designs Lyapunov functions and virtual control law for each subsystem, finally reverses back to complete the entire system control design. To cope with joint friction, external disturbances, as well as model error between simulating plant and reality, several adaptive neural backstepping controllers are proposed based on different dynamics’ demands or accuracies. Although similar control scheme may be provided for single robotic application, this combination of backstepping, NN, sliding mode, and model weighting in complex cooperative internal force regulation can be seldom found in literature.
Dynamic model–based adaptive neural backstepping sliding-mode controller (MANNBS) design
The cooperative manipulators system is autonomous nonlinear and its mathematical model can be expressed as follows

where x1 and x2 are state vectors and y denotes the systems output. The main steps of MANNBS can be described as follows
Step 1
According to tracking and operating on the object, the position tracking of the object is developed, and z1 is selected as the trajectory tracking error in joint space as follows

where

where α is the virtual control coefficient and λ is a positive constant. And the velocity error of the manipulator is defined as

To the first corresponding subsystem, Lyapunov function is selected as follows

and

As λ is a positive constant that it is brief to see if equation (22) satisfies z2 = 0, then the first subsystem of the manipulator system is stable.
Step 2
Define the sliding variable as

where k is a positive constant. And we have the robot dynamics written in terms of filtered tracking error as

Define another Lyapunov function as

Then

As

To satisfy

where

where the notation
where

The ideal FFNN weights are bounded so that

where
Step 3
The third Lyapunov function is defined as

where η is a positive constant. Using (20), (31), and (33) then

The adaptive control rule can be selected as

Using (32) and (35) then equation (34) can be rewritten as

where





Define

then

where

Selecting the proper parameters of W2, λ, and k to satisfy

From the property of internal forces we have

where

It is easy to know that

Thus,

or

Therefore,
We achieve internal force regulation with a decentralized control scheme instead of centralized design, meanwhile with less nonlocal uncertainties. It is obvious from control law (28) that no dynamical knowledge for other manipulators is required for that local particular manipulator. This means that each manipulator achieves its own dynamic estimation and calculates forward kinematics with its own attributes. A feedforward NN is adopted requiring no preliminary off-line learning, and moreover, traditional force feedback is replaced by feedforward of the desired internal force

where
Adaptive neural backstepping sliding-mode controller (ANNBS) design
MANNBS takes advantage of existing knowledge of system dynamics; however, for practical applications, this dynamic knowledge is sometimes out of reach, thus ANNBS is provided based on MANNBS, for model-free circumstance. Considering equations (16), (38), and neural estimation for robot nonlinear function in the study by Panwar et al.,
27
a new RBF NN is introduced as
where X0 can be chosen as

with the same input X, the two FFNNs build up the whole nonlinear estimation and estimate certain part of the system nonlinear function respectively and adaptively. Thus, it is capable to use only one FFNN instead of two to simplify equation (40) with adaptive engine, and we can conclude a new ANNBS as

with familiar neural adaptive law

where this FFNN deals with global cooperative manipulation system dynamic estimation, which is totally different from dynamic uncertainty compensation using MANNBS, although they have similar construction. It is still reasonable with equation (30). So does the Lyapunov stability proof as error part
With this promotion, no knowledge for dynamics of any manipulators is required with ANNBS. This ANNBS can be regarded as one particular expansion generalized out of MANNBS with all the restrictions and also all the capabilities.
Model weighted adaptive neural network backstepping sliding-mode controller (MWANNBS) design
Application problem between simulation model and reality dynamic is concerned here. Consider all the dynamics a controller usually related through a design, which can be divided into three categories: (a) dynamics of reality
We regard pseudo-model as an extension of traditional nominal model and consider the differences existing between simulating plant and realistic physical plant. Model weight, meaning weighting factor (or accuracy) of dynamic model used for controller design, is introduced here for dynamic accuracy to adjust dynamic part and the neural part in controller to cope with pseudo-model, in a relatively global and convenient way. Take positive constant Γ between 0 and 1 as model weight and we define an impact factor as
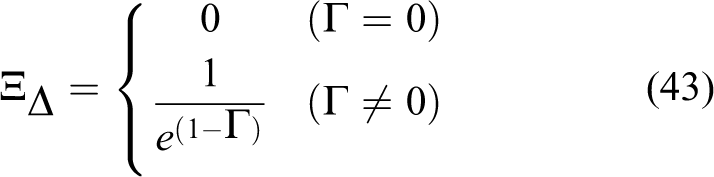
Figure 2 depicts the block diagrams of the MWANNBS and when Γ = 0, MWANNBS works the same as ANNBS. Within low dynamic accuracy, impact factor ΞΔ is adopted after model-based part to weaken model-based control because lower Γ represents more pseudo-model. It is worth noting that there is no big problem adopting a continuous saturated function instead of the impact factor ΞΔ, but to meet the following conditions: (a) remaining in the range of 0–1 and (b) being monotonically increasing function of model weight Γ. Such saturated function can also provide the weighting adjustment, without changing the structure of the controller. While model weight Γ and robust term e(1−Γ) are selected to reinforce and adjust FFNN part as well as to adjust robust part. Combining former MANNBS and ANNBS, MWANNBS is designed as

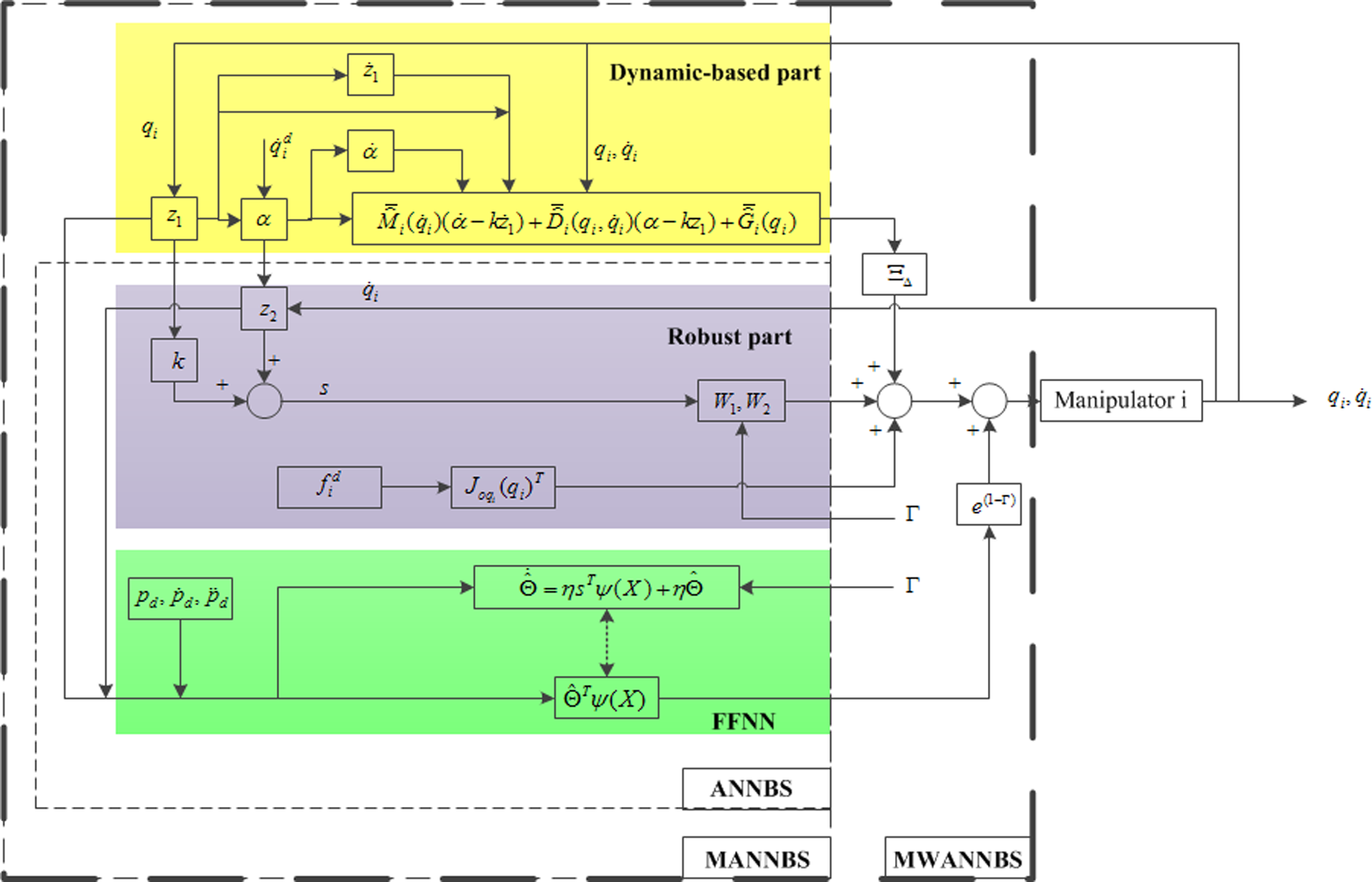
Block diagram of MWANNBS. MWANNBS: model weighted adaptive neural network backstepping sliding-mode controller.
with the same input X as

where
Simulation and discussion
Simulation plant and settings
A set of simulations has been carried out on two identical 3-DOF planar robot manipulators holding a common circular disc rigidly. The physical parameters of the cooperative manipulators and the object are listed in Table 1. The explicit expressions of mass matrix, Coriolis and centripetal matrix, gravity matrix, and so on, are similar to the work of Zribi et al.
9
For simulation, the bases of the two manipulators are set to

Physical parameters of the system.

where (x, y, zφ) represents the position and orientation of the diameter joining contact points with the world frame axis, respectively. The kinematic equation is given as
We carry out some simulations to verify the capability of the proposed controllers. The preset trajectory of the circular object is set up as
Simulation using MANNBS and ANNBS under no pseudo-model
The first simulation is in the case of no friction or external disturbance assuming that 

The following parameter values are taken: (a) PID,
The global position and internal force tracking errors of the object are shown in Figure 3. It is clear from these results that both controllers proposed here perform superior to the traditional methods with higher accuracy and stability, all tracking errors converge to zero in considerable time. However, less accuracy and slower convergence can be found using PID. Moreover, MANNBS converges faster and little more precise than ANN and ANNBS which arise a small erupt at the beginning. Obvious training process can be found within ANN and ANNBS. And we think that model-based part in MANNBS provides much more precise contribution than model-free ANN and ANNBS.

Comparison of cooperative tracking errors of several controllers without any uncertainties: (a)
In the second simulation, fully amplified (for more significant results) friction and external disturbance are considered. The global position and internal force tracking errors of the object are shown in Figure 4. These results reveal the superiority of the proposed controllers’ tracking ability to that of the ANN and PID under friction and external disturbance. Nevertheless, MANNBS converges faster and is more stable than ANN or ANNBS which arises small erupt sometimes at velocity direction turning.
Comparison of cooperative tracking errors of several controllers in the presence of structured and unstructured uncertainties: (a)
To solve the computational burden, we can run our controllers with a hierarchical structure. 40 Specifically, dynamic-based part is implemented at a high bandwidth, and FFNN part operates at a lower bandwidth. This can be found as a computationally effective compromise, taking into account the benefits of hard controllers’ capabilities as well as those of soft computing techniques in terms of NN learning.
In order to compare the performance of the controllers to better highlight the advantages of the proposed strategy, we also compute some performance indices, for example, root mean square error in Table 2 and standard deviation in Table 3.
RMS error comparison.

RMS: root mean square; PID: proportional–integral–derivative; ANN: adaptive neural controller; MANNBS: model–based adaptive neural backstepping sliding-mode controller; ANNBS: adaptive neural backstepping sliding-mode controller.
SD comparison.

SD: standard deviation; PID: proportional–integral–derivative; ANN: adaptive neural controller; MANNBS: model–based adaptive neural backstepping sliding-mode controller; ANNBS: adaptive neural backstepping sliding-mode controller.
Simulation with MANNBS and MWANNBS under pseudo-model
It is not a coincidence that MANNBS always shows better performance than pure neural approximating structured methods as ANN or ANNBS. The model-based term in control loop offers immediately impressive contribution while NNs are in sort of training and learning. This notes the necessity of turning contribution of the inverse dynamics and the neural approximation for internal force.
As a result, MWANNBS becomes even meaningful to adjust model-based part and the neural part around pseudo-model circumstances, neither simply take all nor just estimation. A third experiment is carried out between MANNBS and MWANNBS under different degrees of pseudo-model, that is,
Selection for model weight Γ.
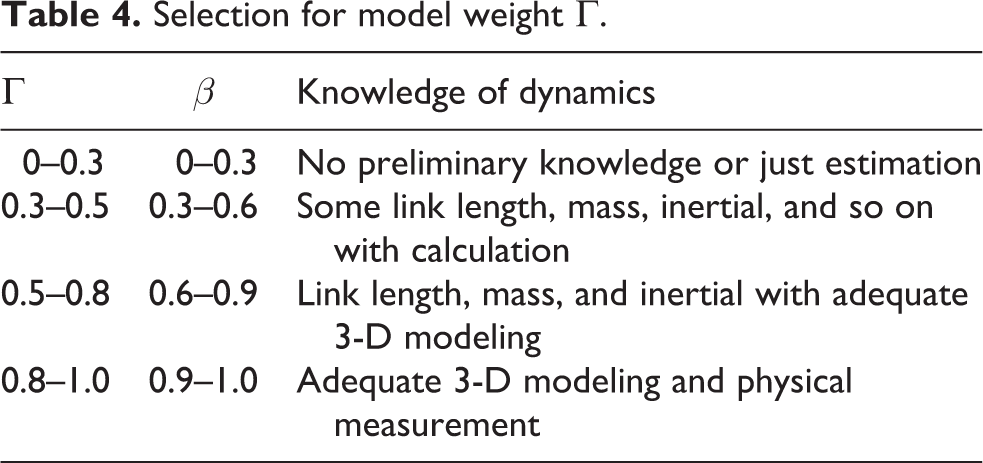
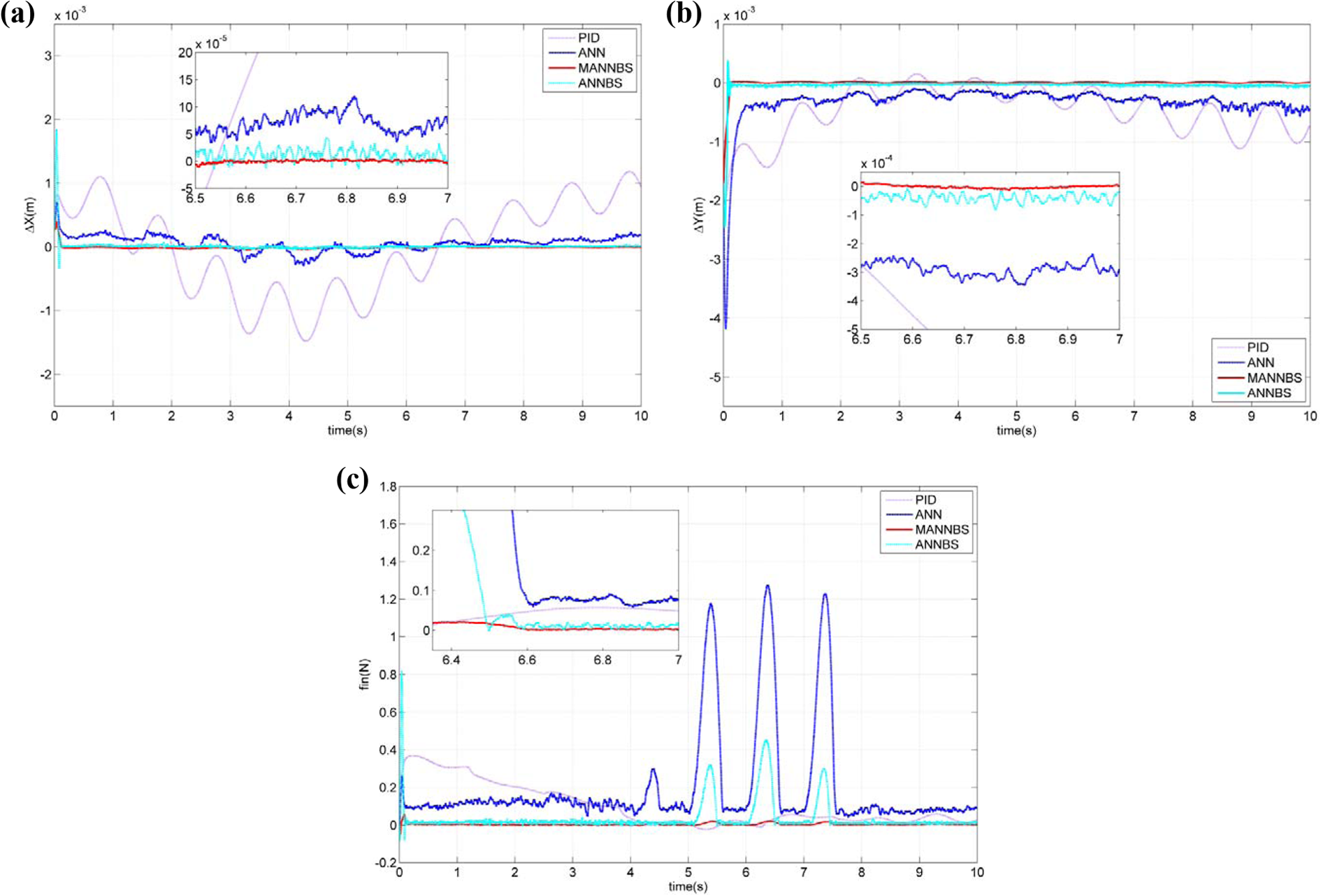
Figure 5 shows the results that those pseudo-model errors do affect the tracking performances terribly. For desire situation (β = 1 and

Comparison of cooperative tracking errors in the presence of pseudo-model error: (a)
Conclusion
In this article, a novel decentralized MWANNBS is proposed for cooperative manipulators holding a single rigid object, which is based on different dynamics’ demands or accuracies without any force sensors. A model-based MANNBS is first developed using a feedforward RBF NN to compensate the uncertain dynamics of the manipulators and the object. And without any preliminary knowledge of the dynamics, a model-free NN-based ANNBS comes out of the former one. Both of the NNs require no off-line learning and show efficiently compensating capability under joint friction and external disturbances in simulating results. Model weight is suggested in face of pseudo-model to keep more direct control. And an optimized MWANNBS is developed for achieving more preferable performance, integrating both MANNBS and ANNBS. Since model-based part exhibits better contribution to higher accurate tracking than that of estimation part, MWANNBS adjusts and distributes control contribution within model-based part, FFNN estimation part, and robust part. This relatively new combination of backstepping, NN, sliding mode, and model weighting in complex cooperative internal force regulation can be seldom found in literature. No knowledge for other manipulators is required for that local particular manipulator. Thus, nonlocal uncertainties can be avoided, also local dynamic is not essential but selectable. The position and internal forces tracking errors have superior convergence for all three controllers compared with other traditional methods in simulation results. MWANNBS outstands with higher accuracy and stability under various degrees of pseudo-model. The overall stability is proved through Lyapunov function and numerical simulations. However, since professional equipment like force or displacement sensors costs enormous, yet there are insufficient conditions, experiments will be included as future work. This structure is also feasible with single robotic arms and multifingered manipulators, and maybe some underactuated cooperative manipulators with our backstepping application. Centralized control design may consider complicated relative motion among different individuals, which is helpful for internal force regulation, but more coupled uncertainties should be cared as future scope.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors have received support from the National Natural Science Foundation of China (51675470), and the Fundamental Research Funds for the Central Universities (2017QNA4001).