
Abstract
Multi-robot consensus has been extensively applied in robotics. In this study, a new protocol is proposed to solve the finite-time average consensus problem. The protocol can improve the convergence rate. The upper bound of the convergence time is obtained. Analysis shows that there exists a limit value of the convergence time when the disagreement of initial states tends to be infinitely large, and the value is irrelevant to the initial states. The relationship between convergence time and initial states, communication topology, parameter is analysed. Lastly, the effectiveness of the results is verified by simulations.
Introduction
In recent years, many applications require a massive number of robots or vehicles to work cooperatively and accomplish a complicated task. Thus, many researchers investigated coordination control of multi-robot systems or multi-agent systems, such as the flocking, 1 formation control 2 –4 and cooperative control of the unmanned aerial vehicles 5,6 and the attitude alignment of clusters of the artificial satellites. 2 The multi-robot consensus means all the robots of a system can reach an agreement with regard to certain quantities of interest through designing a proper consensus protocol. The protocol is based on the local information of each robot. 7 Additional details can be found in the studies by Cao et al. 8 and Kantamneni et al. 9 and the references therein.
In the study of the consensus problem, convergence time is a significant performance indicator for a consensus protocol. The typical linear model of the consensus for multi-robot systems was proposed by Olfati-Saber. 1 The authors used a graph to model the communication topology among agents and demonstrated that the second smallest eigenvalue of the graph Laplacian matrix quantifies the convergence rate; this finding prompted many researchers to develop ways to increase algebraic connectivity and lots of valuable achievements have been obtained. 10,11
Unfortunately, the protocols in the aforementioned works can only achieve state consensus in infinite time interval, that is, the consensus is achieved only asymptotically. However, the stability or performance of a multi-robot system in a finite-time interval needs to be considered in several cases. The finite-time stability focuses on the behaviour of a system response over a finite-time interval. 12 Therefore, studying the finite-time stability of a multi-robot system is valuable to some extent. The multi-agent finite-time stability analysis has attracted the attention of many researchers recently. Wang and Xiao 13 discussed two continuous finite-time consensus protocols and determined the conditions under which the protocols are guaranteed to achieve the finite-time consensus. Shang 14 proposed a sufficient criterion to ensure that the system reaches a consensus in finite time. Zhang et al. 15 investigated the distributed finite-time consensus-tracking problem for coupled harmonic oscillators using both state feedback control and output feedback control. In the study by Zuo and Lin, 16 a new consensus protocol was constructed, and the convergence time of the proposed consensus protocol has an upper bound for the arbitrary initial state. Zhu et al. 17 investigated the finite-time consensus problem with single and double integrator dynamics and constructed new non-linear protocols for the first-order and second-order leader–follower multi-agent systems. In the study by Wang et al., 18 a linear term was added to the protocol to solve the finite-time average consensus problem, thereby improving the convergence performance. Yu and Long 19 investigated the distributed finite-time consensus problem of the second-order multi-agent systems in the presence of bounded disturbances. In the study by Zhu et al., 20 the finite-time consensus problems of heterogeneous multi-agent systems composed of both linear and non-linear dynamics agents were investigated. Some sufficient conditions for the finite-time consensus were established in the leaderless and leader-following cases.
However, the convergence time of most existing protocols is closely related to the initial states of the robots. If the states of different robots significantly differ, then the convergence time is very large, and this condition limits the practical engineering applications. Although the convergence time of the protocol in the study by Zuo and Lin 16 has an upper bound for the arbitrary initial state, the protocol is complex and the parameters are restricted. Furthermore, the relationship between convergence time and the factors is unclear. In the current study, a new protocol is proposed to solve the finite-time average consensus problem and overcome the defect of existing protocols.
The main contributions of this study are threefold: (1) a new protocol is proposed to solve the finite-time average consensus problem, and it can improve the convergence rate. (2) The stability is verified, and the upper bound of convergence time is obtained. The analysis result shows that there exists a limit value of the convergence time when the disagreement of initial states is infinitely large, and the value is irrelevant to the initial states. (3) The relationship between convergence time and protocol parameter, communication topology, initial state is analysed.
The rest of the article is organized as follows. ‘Preliminaries and problem formulation’ section presents several basic definitions and results on algebraic graph theory, the formulation of the problem and a list of basic properties. The main results and the proof are provided in ‘Main results’ section. The simulation results are presented in ‘Simulations’ section, and the conclusions are elaborated in the last section.
Notations
Preliminaries and problem formulation
Preliminaries
Several basic definitions and results on the algebraic graph theory are introduced in this subsection. Comprehensive discussions are found by Godsil and Royle. 21
We let
Lemma 1
Let

then L has the following properties L always has a 0 eigenvalue and For any If the graph is undirected and connected, then the second smallest eigenvalue of L, which is denoted by λ
2(L), called the algebraic connectivity of graph, is larger than zero and
Lemma 2
Suppose that function V(t): [0, ∞) → [0, ∞) is differentiable and satisfies the condition 22

where K > 0 and 0 < α < 1, then V reaches zero at t*, and V(t) = 0 for all t ≥ t*

Lemma 3
If

If

Problem formulation
Under the assumption that n nodes exist in the studied multi-robot system, each robot can get up to the required rate for the proposed protocol of this study. The state of robot vi
is denoted by xi
,

where ui is called the consensus protocol.
With the given protocol ui
, for any initial states, if there exists stable equilibrium x* satisfying xi
= x* for all
The protocol which is utilized to solve the finite-time average consensus problem is

where μ > 0, η > 0 and m > 1, and the sign(·) is a sign function defined as

Basic properties
Property 1
Protocol (7) is continuous with respect to the variables x
1, x
2,…, xn
. Under this protocol, at least one solution of the differential equation (6) exists in [0, ∞) for any initial states
Proof
Consider the function f(r) = μsign|r|2−1/m
+ ηsign|r|1/m
, where m > 1. If r > 0, then f(r) = μr
2−1/m
+ ηr
1/m
is continuous and
According to Peano’s existence theorem,
25
at least one solution of differential equation (6) exists in [0, t] for any initial states
Property 2
With protocol (7), the equilibrium point set of the differential equation (6) belongs to span{
Proof
We prove this property by contradiction. We let
To prove the opposite, we suppose that
Main results
Stability analysis
Protocol (7) is studied in this subsection. The protocol is verified to solve the finite-time average consensus problem. The stability of the system is guaranteed. Furthermore, the upper bound of convergence time is obtained. Moreover, there exists a limit value of the convergence time when the disagreement of initial states is infinitely large, and the value is irrelevant to the initial states.
Theorem 1
Suppose that communication topology
Proof
Given that the topology is undirected and connected, aij
= aji
for all

We let

According to equation (9), κ is time invariant. We let

Consequently

Here, the first Lyapunov function is taken

Obviously, V 1(t) ≥ 0 for all δ, and V 1(t) = 0 if and only if δ(t) = 0.
By differentiating V 1(t) versus time, we obtain
Equation (14) results from

Denote

Suppose that V
1 ≠ 0, then

We assume that




We assume that


Combining the above formulas results in

We let

We let

Then

Here, the second Lyapunov function is taken, we let V 2 = s 2. Evidently, V 2 ≥ 0 for all s, and V 2 = 0 if and only if s = 0. By differentiating V 2 versus time, we obtain



We let




The function f(x) = arctan(x) is monotonically increasing. If x > 0, we get f(x) > 0, and if and only if x = 0, we get f(x) = 0. Supposing when the convergence time is T, V 1(t) converges to zero. That is

Finally, we can get

Obviously, T is the upper bound of the convergence time. Moreover, if the disagreement of the robots’ initial states is infinitely large, we can obtain a limit value Tu

Now we have proved that V 1(t) satisfies the condition of lemma 2 and thus makes V 1(t) reach zero in finite time. Finally, the states of all robots reach final state κ, the average of their initial states.
If V
1(t) = 0, then
Remark 1
Theorem 1 offers a new protocol to solve the finite-time average consensus problem. The system stability is guaranteed. The upper bound of convergence time is obtained. Analysis shows there is a limit value of the convergence time when the disagreement of initial states is infinitely large and the value is irrelevant to the initial states, and it also shows that the limit value is the upper bound of upper bound of convergence time.
Remark 2
The kinematics equation of the proposed protocol shows that the changing rate of system state is larger compared with that of the typical finite-time consensus protocol in the studies by Wang and Xiao 13 and Wang et al. 18 owing to the existence of the first non-linear term, especially during the early stage. Thus, the convergence rate of the system can be improved effectively. Moreover, the second non-linear term guarantees that the system can achieve the consensus in finite time.
Performance analysis
In this subsection, we study the relationship between convergence time and other factors, including initial states, underlying communication topology and parameter.
Convergence time is defined as the amount of time the system consumes to reach a consensus. Obtaining the precise convergence time of the studied non-linear system is difficult. However, convergence time can be analysed through its upper bound obtained using equations (37) and (38).
Firstly, we study the relationship between convergence time and initial states. In the consensus problem, rather than the size of the initial states, the disagreement between states is more concerned. By definition, V 1(t) measures the disagreement of the robots’ current states with their common final state. In particular, V 1(0) measures the disagreement of the initial states with the final state. Equation (37) shows that the convergence time increases when V 1(0) increases. The convergence time tends to the limit value Tu if V 1(0) is infinitely large.
Given the unique advantage of the protocol, next we only study the relationship between convergence time and communication topology, parameters m and n when V 1(0) is infinitely large.
As shown in equation (38), the convergence time decreases when λ min is large. Therefore, the convergence time can be decreased by increasing the algebraic connectivity.
Lastly, we study the relationship between convergence time and parameters m and n. Using equation (38), and taking the derivative with respect to m, we obtain
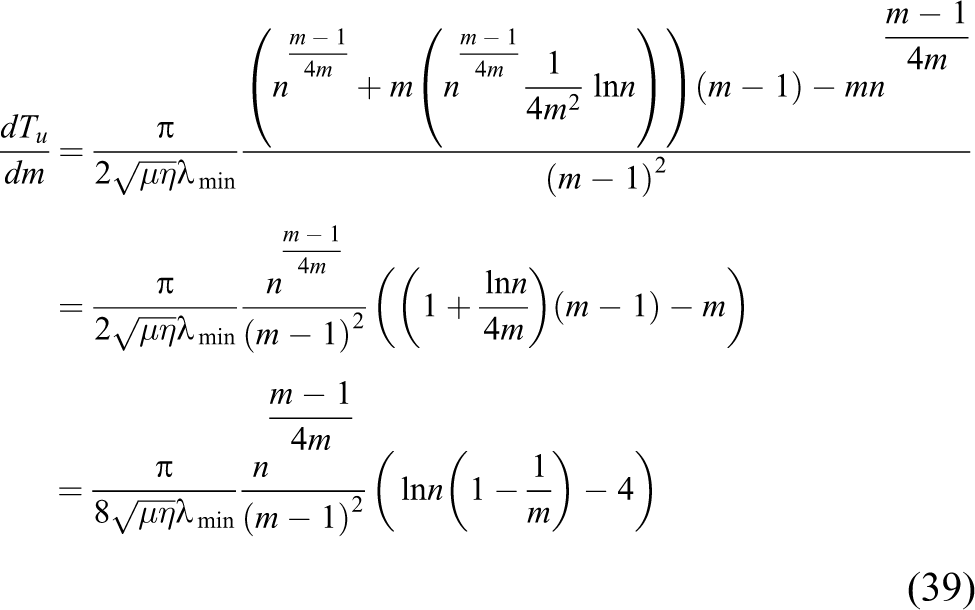
For m > 1, we obtain 0 < 1−1/m < 1. If a small number of nodes are present in the multi-robot system (approximately n<53), we obtain dTu /dm < 0. Therefore, the convergence time decreases when m is large. If a large number of nodes are present in the multi-robot system (approximately n > 53), we obtain dTu /dm < 0 if m is small and dTu /dm > 0 if m is large (the size of m is decided by the number of nodes). In other words, the convergence time decreases initially and then increases as m becomes large. Therefore, an optimal parameter m which can enable the convergence time to obtain the minimum value exists.
Remark 3
The relationship between convergence time and initial states, communication topology, parameters m and n is analysed. Accordingly, the convergence time can be effectively adjusted.
Simulations
For simplicity, we suppose the control gain of protocol (7) μ = η = 1 in this study. Consider an undirected network with n = 6 nodes as shown in Figure 1. The graph has 0−1 weights. Through calculation, we obtain λ
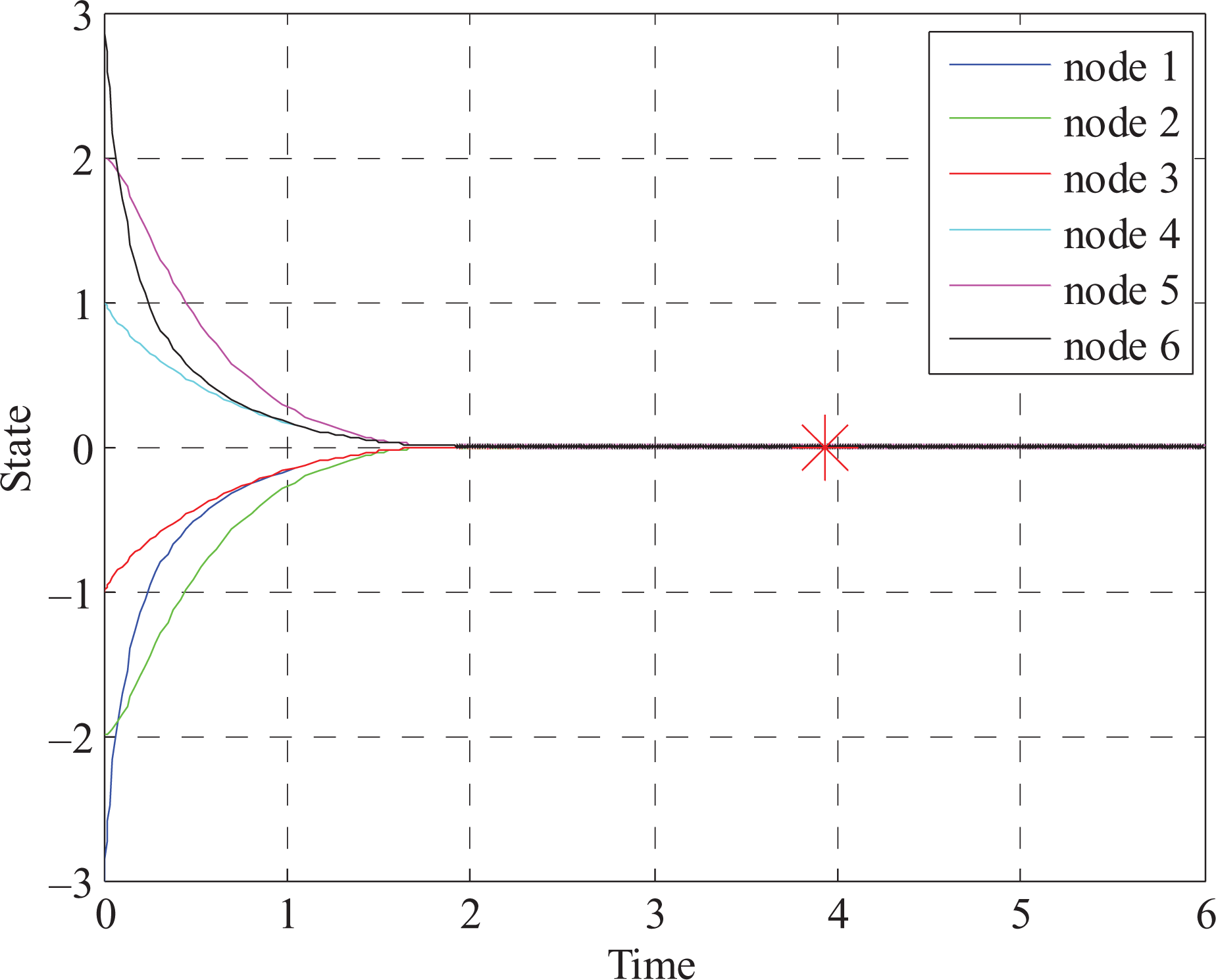
2(L) = 0.2679. When m = 2, the initial states are [−3; −2; −1; 1; 2; 3]T, and the state trajectories of robots are shown in Figure 2 when protocol (7) is applied. The red asterisk (*) denotes the limit value Tu
. The final consensus state is
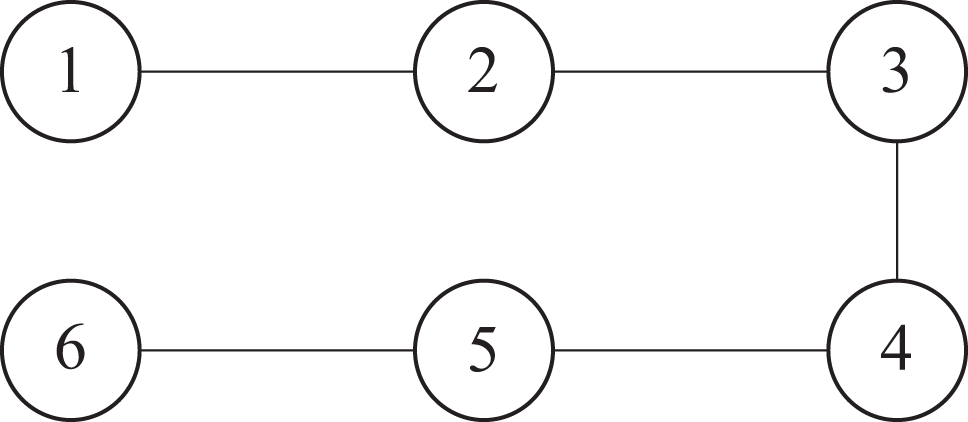
The communication topology of six robots.

The state trajectories when m = 2 and the initial states are [−3; −2; −1; 1; 2; 3]T.
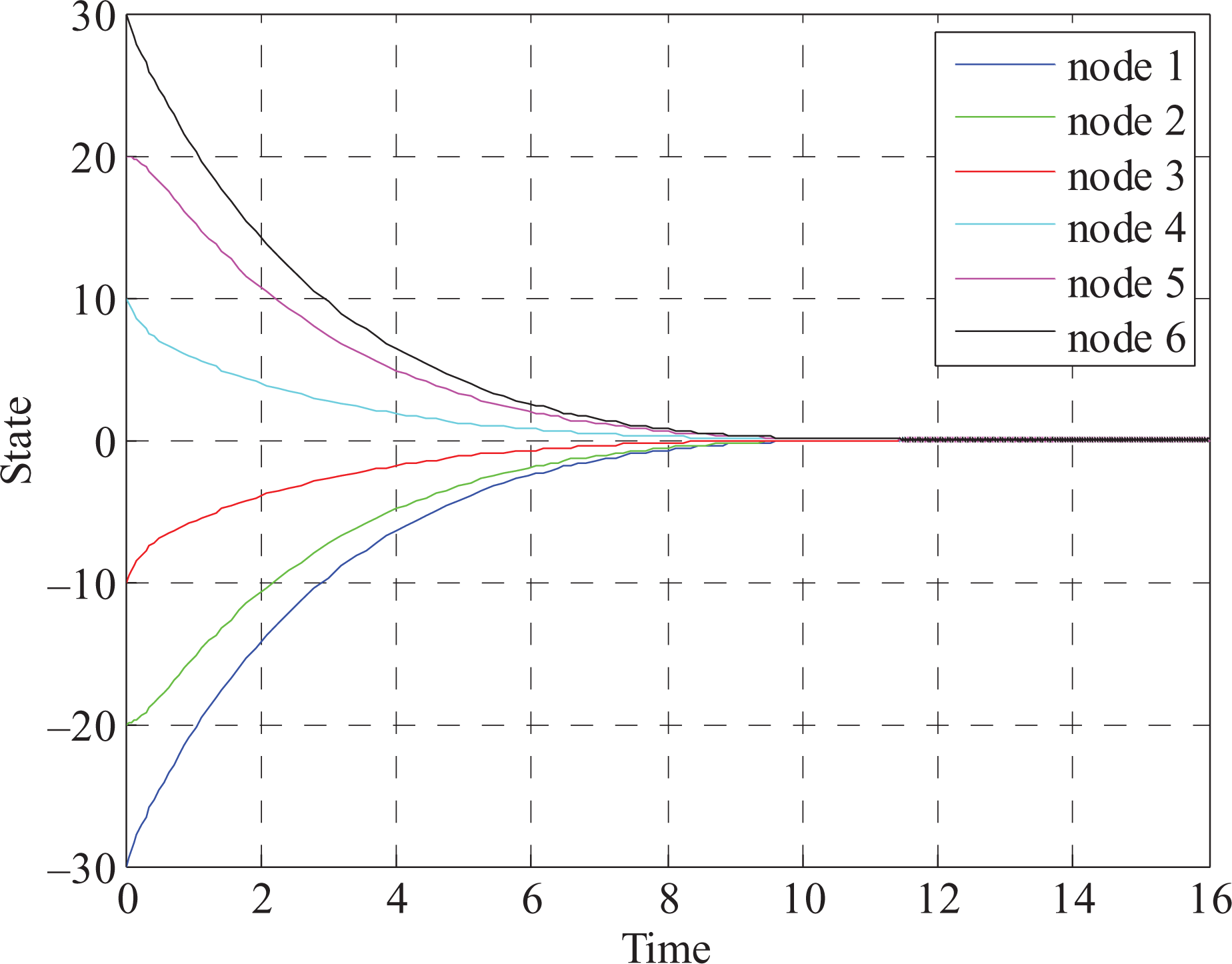
Under the initial states of [−30; −20; −10; 10; 20; 30]T, the state trajectories when m = 2 and m = 4 are shown in Figures 3 and 4, respectively. Comparing Figures 2 and 3 shows that the convergence time is large when V 1(0) is large. Therefore, when the difference in the initial state is large, the convergence time is long. Moreover, comparing Figures 3 and 4 shows that the convergence time decreases when m is large and if n is small (n = 6).
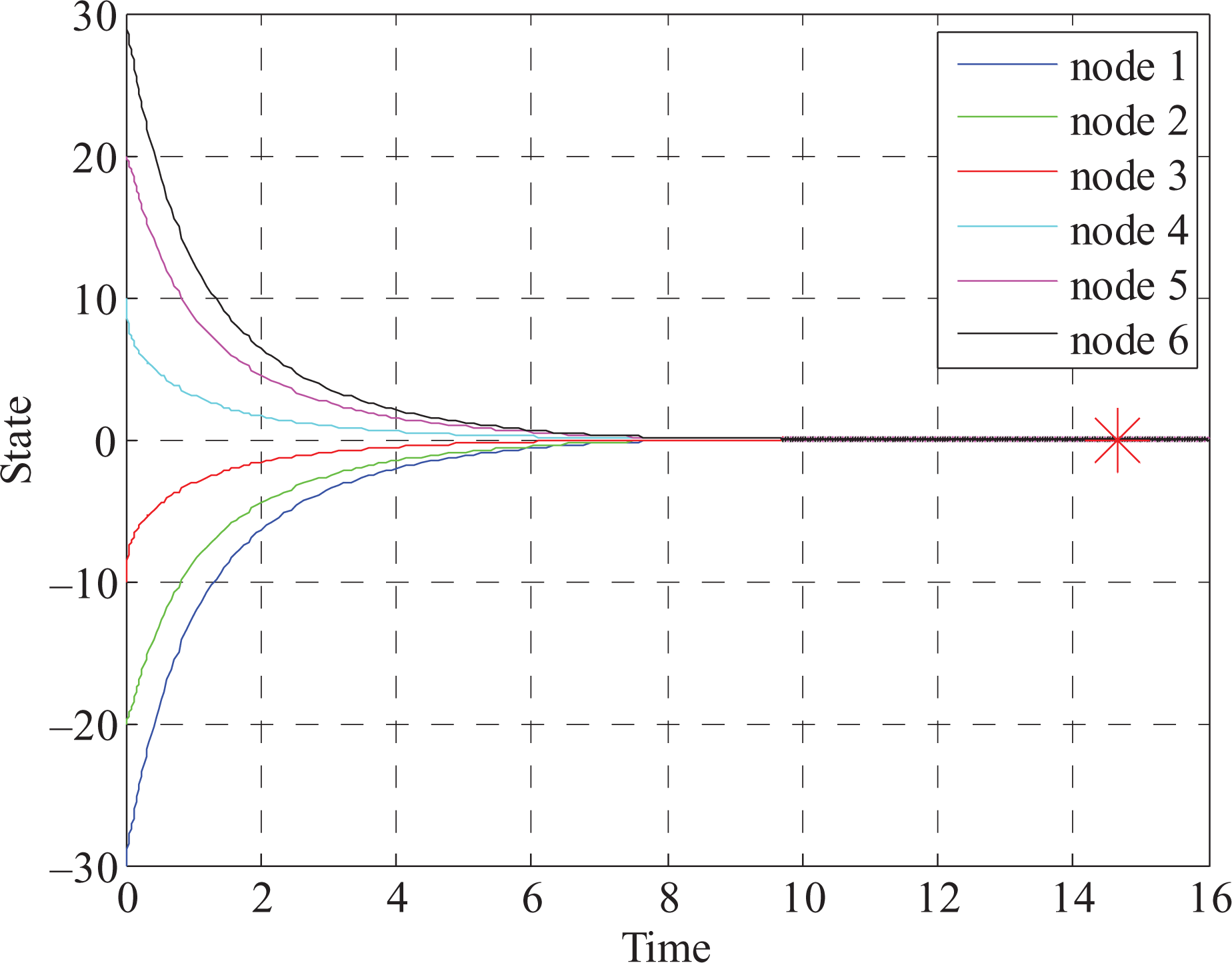
The state trajectories when m = 2 and the initial states are [−30; −20; −10; 10; 20; 30]T.

The state trajectories when m = 4 and the initial states are [−30; −20; −10; 10; 20; 30]T.
The state trajectories under the consensus protocol in the study by Wang et al. 18 are shown in Figure 5. The communication topology when the initial state is [−30; −20; −10; 10; 20; 30]T and the other parameters are the same is provided in Figure 1. Comparison with Figure 3 shows that the convergence time of protocol (7) is shorter than that of the consensus protocol in the study by Wang et al. 18 Therefore, the existence of the first non-linear term can effectively reduce the convergence time.
The state trajectories of robots under the consensus protocol in the study by Wang. 18
We verify the relationship between convergence time and communication topology. Another undirected network with n = 6 nodes is shown in Figure 6. The graph also has 0−1 weights. Through calculation, we obtain λ 2(L) = 1. The state trajectories when m = 2 and the initial states are [−3; −2; −1; 1; 2; 3]T are shown in Figure 7.

Another communication topology of six robots.
The state trajectories of robots when topology is Figure 6.
Comparison with Figure 2 indicates that the convergence time decreases if the algebraic connectivity is large and when the other conditions are similar.
We demonstrate that the convergence time has a limit value when V 1(0) is infinitely large through the topology given in Figure 1. The relationship between convergence time and parameters m and V 1(0) is simulated, and the result is shown in Figure 8(a). In particular, the relationship between convergence time and V 1(0) when m = 4 is shown in Figure 8(b). The red solid line represents the relationship between T and V 1(0). The red broken line represents the limit value Tu . Comparing the two figures shows that the convergence time moves to a limit value which is irrelevant to the initial states, when V 1(0) is infinitely large.

The relationship between convergence time and parameters V 1(0) and m.
Lastly, we demonstrate the relationship between convergence time and parameters m and n when V 1(0) is infinitely large. For a series of different undirected and connected graphs with 4 nodes to 30 nodes, we suppose that the algebraic connectivity of all the graphs is 1. The relationship between convergence time and parameters m and n is shown in Figure 9(a). In particular, the relationship between T and m when n = 10 is shown in Figure 9(b). The two figures show that the convergence time decreases when m is large and if a small number of nodes are present in the multi-robot system.

The relationship between convergence time and parameters m and n (if n is small).
For a series of different undirected and connected graphs with 180 nodes to 210 nodes, we suppose the algebraic connectivity of all the graphs is also 1. The relationship between T and parameters m and n is shown in Figure 10(a). In particular, the relationship between T and m when n = 200 is shown in Figure 10(b). The two figures show that if a large number of nodes are present in the multi-robot system, then the convergence time decreases initially and then increases as m becomes large. Therefore, an optimal parameter m which can enable the convergence time to obtain the minimum value exists.
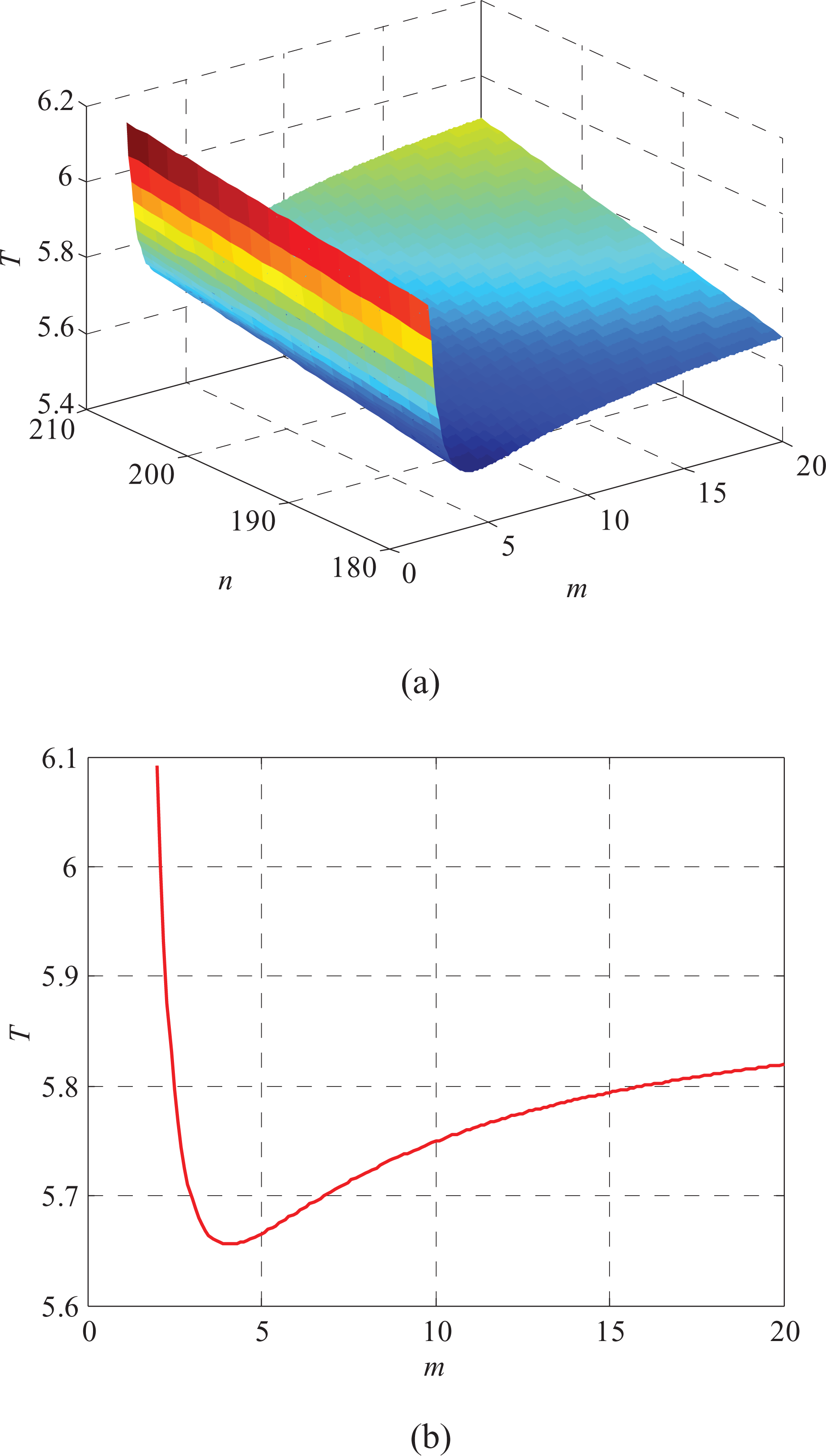
The relationship between convergence time and parameters m and n (if n is large).
Conclusions
In this study, a new protocol was developed to solve the finite-time average consensus problem in multi-robot systems. The relationship between convergence time and initial states, communication topology, parameters m and n was analysed. Through simulation, the following conclusions were obtained. The proposed protocol can solve the finite-time average consensus problem. The system stability can be guaranteed and the upper bound of the convergence time was obtained. Analysis shows that the new protocol can effectively improve the convergence rate; moreover, there exists a limit value of the convergence time when the disagreement of initial states is infinitely large, and the value is irrelevant to the initial states. The convergence time decreases when the parameter m increases if a small number of nodes are present in the multi-robot system (approximately n < 53). If a large number of nodes are present in the multi-robot system (approximately n > 53), then the convergence time decreases initially and then increases as m becomes large.
The authors in this study only considered leaderless first-order multi-agent systems. Future works will focus on extending the proposed protocol to second-order or high-order multi-robot systems with directed and time-varying networks.
Footnotes
Acknowledgements
The authors would like to express their appreciation to the anonymous referees and the associate editor for their valuable comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no 61603414 and grant no 51505499).