In this article, an adaptive fuzzy backstepping dynamic surface control approach is developed for a class of nonlinear systems with unknown backlash-like hysteresis and unknown state discrete and distributed time-varying delays. Fuzzy logic systems are used to approximate the unknown nonlinear functions and a fuzzy state observer is designed for estimating the immeasurable states. Then, by combining the backstepping technique and the appropriate Lyapunov–Krasovskii functionals with the dynamic surface control approach, the output-feedback adaptive fuzzy tracking controller is designed. The main advantages of this article are (i) the existence of the state discrete and distributed time-varying delays such that the investigated systems are more general than that of the existing results, (ii) the proposed control scheme can eliminate the problem of “explosion of complexity” inherent in the backstepping design method, and (iii) for the nth nonlinear system, only one fuzzy logic system is used to approximate the unknown continuous time-varying delay functions since all of them are lumped into one unknown nonlinear function, which makes our design scheme easier to be implemented in practical applications. It is proven that the proposed design method is able to guarantee that all the signals in the closed-loop system are bounded and the tracking error can converge to a small neighborhood of origin with an appropriate choice of design parameters. Finally, the simulation results demonstrate the effectiveness of the proposed approach.
In the past decades, many new control theories have been gradually established because of the controlled plants and the control objectives becoming more and more complex, such as the nonlinear sliding mode control,1 neural network control,2,3 fuzzy control,4 and so on. It should be emphasized that fuzzy control with heuristic knowledge or linguistic information has been successfully applied to many nonlinear systems since it does not need an accurate mathematical model of the system.5–9 In a study by Qin et al.,5 a fuzzy adaptive robust control strategy was put forward for the trajectory tracking control of space robot, which can control the space manipulator to achieve a good trajectory tracking effect in different gravity environments without changing the structure or parameters. In a study by Bakdi et al.,6 the off-line path planning problem for mobile robots was dealt with by combining with the fuzzy adaptive control. And in a study by Cazarez-Castro et al.,7–9 the output regulation problem for the servomechanisms with nonlinear backlash was solved using type-1 or type-2 fuzzy logic controllers. Moreover, in recent years, the control design of nonlinear systems with hysteresis has become a challenging yet rewarding problem. One of the main reasons is that the hysteresis phenomenon can be often encountered in a wide range of physical systems and devices.10 On the other hand, since the hysteresis nonlinearity is non-differentiable, the system performance is often severely deteriorated and usually exhibits undesirable inaccuracies or oscillations and even instability.11,12 And in the literature,13–18 in order to control uncertain nonlinear systems with unknown backlash-like hysteresis, fuzzy logic systems (FLSs) of Mamdani type were used to approximate the uncertain smooth nonlinear functions, and then an adaptive backstepping technique was applied to design controllers. In a study by Boulkroune et al.,13 the authors investigated the fuzzy adaptive control design for uncertain multivariable systems with unknown backlash-like hysteresis and unknown control direction that possibly exhibited time delay. In a study by Wang et al.,14 in order to handle the nonlinear properties of hysteretic systems, an indirect adaptive fuzzy controller was proposed. Furthermore, in a study by Li et al.,15–17 the proposed adaptive fuzzy control schemes with a state observer can be used to deal with those uncertain single-input single-output or multiple-input multiple-output (MIMO) nonlinear systems with unknown backlash-like hysteresis. And in a study by Cui et al.,18 an adaptive tracking control problem was studied for a class of switched stochastic nonlinear pure-feedback systems with unknown backlash-like hysteresis under arbitrary switching.
Moreover, it should be pointed out that a drawback with the backstepping technique is the problem of “explosion of complexity,” that is, the complexity of the controller grows drastically as the order n of the system increases. This “explosion of complexity” is caused by repeated differentiations of certain nonlinear functions. To overcome the “explosion of complexity,” dynamic surface control (DSC) was proposed in many existing results, for example,19–25 In a study by Swaroop et al.,19 a DSC technique was proposed to eliminate this problem by introducing a first-order filtering of the synthetic input at each step of the traditional backstepping approach. In a study by Swaroop et al.,20 DSC was considered for the tracking problem of non-Lipschitz systems. In a study by Zhang and Ge,21 the control scheme was developed using the DSC approach for pure-feedback nonlinear systems with an unknown dead zone. In a study by Wang et al.,22 the authors constructed an adaptive neural controller for a class of pure-feedback nonlinear time-delay systems through the DSC technique. Moreover, in the lierature,23–25 the adaptive fuzzy backstepping control approaches were proposed for nonlinear systems with unknown time delays and immeasurable states, MIMO nonlinear systems with immeasurable states, and uncertain stochastic nonlinear strict-feedback systems without the measurements of the states, respectively. And in a study by Zhang and Lin,26 for a class of nonlinear systems with unknown backlash-like hysteresis at the input, based on a high-gain observer, an adaptive DSC scheme was proposed which can be able to mitigate the effect of hysteresis, to eliminate the explosion of terms inherent in backstepping control. However, by combining the state observer with the FLS and the DSC technique, how to design an adaptive fuzzy output-feedback controller for a class of uncertain nonlinear systems with unknown backlash-like hysteresis is a challenging subject.
Since time-delay phenomena are often encountered in various engineering systems such as biological reactors, rolling mills, and so on, the existence of time delay is a significant cause of instability and deteriorative performance, so the control design of nonlinear time-delay systems has been receiving much attention. Recently, several fuzzy adaptive control schemes have been reported which combine the Lyapunov–Krasovskii functional with the adaptive backstepping fuzzy control for nonlinear systems with time delays.2,13,17,27–30 However, it is worth noting that the results in them were obtained in the context of continuous fuzzy systems with constant27,28 or time-varying delays.2,13,17,29,30 When the number of summands in a system equation is increased and the differences between the neighboring argument values are decreased, systems with distributed delays will arise. Thus, the topic of distributed delay systems has been an attractive research topic in the past years.31–34 However, for a nonlinear system with unknown backlash-like hysteresis and unknown distributed time-varying delays, how to design an effective controller is worth studying.
Motivated by the above observations, an adaptive fuzzy DSC output-feedback control approach is presented in this article for a class of uncertain nonlinear systems, under the conditions of unknown backlash-like hysteresis, unmeasured states, unknown state discrete time-varying delays, and unknown state distributed time-varying delays. A fuzzy state observer is constructed to estimate the unmeasured states, the appropriate Lyapunov–Krasovskii functionals are used to deal with the unknown discrete and distributed time-varying delay terms, the FLS is employed to approximate the nonlinear functions, and finally, the adaptive backstepping approach is utilized to construct the fuzzy controller. The main contributions of this article are listed as follows:
Considering15,17,23 the distributed time-varying delays, the systems investigated in this article are more general. And the existence of the distributed time-varying delays such that the investigated systems are much more complex and difficult.
By combining the DSC approach, the proposed control scheme can eliminate the problem of “explosion of complexity” inherent in the backstepping design method.
All the unknown time-delay terms are lumped into one unknown nonlinear function which can be approximated by only one FLS such that the suggested adaptive fuzzy controller contains less adaptive parameters and this makes our design scheme easier to be implemented in practical applications. Moreover, in the studies by Li et al. and Tong et al.,17,23 it was assumed that the time-delay nonlinear terms were bounded by known functions, but in this article, the assumption is relaxed.
It can be proven that all the signals in the closed-loop system are bounded and the tracking errors can converge to a small neighborhood around zero. The effectiveness of the developed scheme is illustrated by a simulation example.
Problem formulation and preliminaries
Problem formulation
Consider the system described by
where is the state vector of the system with and y ∈ R is the output signal. fi(⋅), hi(⋅), and mi(⋅) are all unknown smooth nonlinear functions. is the control input and φ(υ) denotes the hysteresis type of nonlinearity. This article assumes that the states of the system (1) are unknown and only the output y(t) is available for measurement.
Assumption 1
The discrete and distributed time-varying delays and satisfy and with and , respectively. In particular, the constants d1, d2, , and may be unknown.
Assumption 2
There exists a known constant Li such that
where is the estimate of xi.
Assumption 3
The desired trajectory yr(t) is continuous and known. Moreover, yr(t), , and are all assumed to be bounded.
Assumption 4
There exists a large positive constant M such that .
Remark 1
Practically speaking, assumption 1 is common and relaxed, we can see it in many results, for example2,17,29,34,35 and the references therein. Moreover, it should be emphasized that the constants d1, d2, , and are introduced only for the stability analysis and they are not used in the controller design, thus they can be unknown in the controller design procedure. Moreover, assumptions 3 and 4 are both common, which can be found in many existing literature.25,15,17,23,36 Due to the assumption of (M may be a large constant), the stability of the closed-loop control system of this article is built in the sense of semi-globally uniformly ultimately bounded (SUUB).15,17
Moreover, since the states of the system (1) are unmeasurable, (1) can be rewritten as follows
where , is the estimate of and the observer will be given later.
Control objective
Our control objective is to design the output-feedback controller υ(t) and parameter adaptive laws such that all the signals involved in the resulting closed-loop system are SUUB, and the output y(t) tracks the given reference signal yr(t) as desired.
Fuzzy logic systems
In this article, the following rules are used to develop the adaptive fuzzy controller.
Rl: if x1 is , x2 is and xn is , then y is Gl, l = 1, 2…, Q
where and y are the FLS input and output, respectively. Fuzzy sets and Gl are associated with the membership functions and , respectively. Q is the rule number. Through singleton function, center average defuzzification, the FLS can be expressed as follows
where is the membership function of , and . Define and with the fuzzy basis function ξl given by
Then, the FLS (4) can be rewritten as
Our first choice for the membership function is the Gaussian function , where and are fixed parameters. It has been proven that when the membership functions are chosen as Gaussian functions, the above FLS is capable of uniformly approximating any continuous nonlinear function over a compact set with any degree of accuracy. This property is shown by the following lemma
Lemma 1
Let f(x) be a continuous function defined on compact set Ω.4 Then, for any constant , there exists an FLS (6) such that
Lemma 2
Given a positive definite matrix and two scalars g > d ≥ 0 for any vector , we have
By lemma 1, the FLS (6) is a universal approximator, that is, it can approximate any unknown continuous function on a compact set.31 Therefore, it can be assumed that the unknown function in system (3) can be approximated by the following FLS. Define the optimal parameter vector as
where Ξi and Ωi are compact regions for and , respectively. The fuzzy minimum approximation error and fuzzy approximation error and are defined as
Assumption 5
and , where and are unknown constants, i = 1, …, n.
Denote , by assumption 5, we have with being an unknown constant. By (10), system (3) can be rewritten as follows
From10,15,17 the control input υ and the hysteresis type of nonlinearity φ(υ), system (1) can be described by
where α, c, and B1 are constants and c > 0 is the slope of the lines satisfying c > B112. In this article, the parameters of hysteresis in (12), that is, α, c, and B1 are completely unknown.17 Based on the analysis of the literature,10,11,15 (12) can be solved explicitly as
where υ(0) = υ0 and φ(0) = φ0.
Remark 2. According to (12) and (13), the backlash-like hysteresis is dealt with successfully and then using the backstepping technique, the input signal υ(t) is designed finally
Based on the above solution, it is shown that d1(υ) is bounded.10,11,15 In this article, we assume that with being a constant. Thus, using (11) and (13) gives that
Fuzzy adaptive observer design
Note that the states of system (1) are not available for feedback, thus a state observer must be designed to estimate the unmeasured states. In this article, a fuzzy adaptive observer is designed for (14) as follows
Rewriting (15) in the following form
where , , , , and is the estimate of c.
Given a positive definite matrix Q = QT > 0, appropriate constants ψ and ε, choose the vector K in A such that the following matrix inequality is satisfied
where PT = P > 0 is a positive definite matrix.
Remark 3
To obtain the positive definite matrix P and vector K from (17), we can decompose A into with and . Then, (17) can be transformed into a standard linear matrix inequality (LMI)
where and N = PK. By solving the LMI (18), one can obtain P and N, which are numerically efficient with a commercially available software. Finally, the matrix K can be computed as K = P−1N.
Let be an observer error, then from (14) to (16), the observer error equation can be obtained as follows
where , , and .
Consider the following Lyapunov candidate V0
the time derivative of V0 is given by
Utilizing Young’s inequality, lemma 2 and assumptions 1, 2 and 4, one has
then, we have
Adaptive fuzzy control design and stability analysis
The adaptive fuzzy backstepping output-feedback control design is based on the following change of coordinates
where αi−1 is called the intermediate control function, which will be defined later.
Step 1. The time derivative of z1 is given by
Consider the Lyapunov function candidate V1 as follows
The time derivative of V1 can be given by
By using Young’s inequality under assumptions 1 and 2, one has
According to (26) and (27) results in
where the term is introduced to deal with the term and . Note that for any κ > 0, we have , then
Step 2. The time derivative of z2 is given by
where . Consider the Lyapunov function candidate V2 as follows
then, the time derivative of V2 along the solutions of (30) is given by
by using , we have
then, similar to (29) yields that
Stepi. Similar to step 2, the time derivative of zi is given by
Consider the Lyapunov function candidate Vi as follows
the derivative of Vi is given by
Step n: The time derivative of zn is given by
Consider the Lyapunov function candidate Vi as follows
the derivative of Vi is given by
Choosing the following Lyapunov function candidate
where
then, we can get that
where . From assumption 1 and (17) yields that
then, (44) can be rewritten as
where
where and is some known compact set in R2. Notice that in (46), the term is discontinuous at z1 = 0. Therefore, it cannot be approximated by the FLS. Similar to the study by Wang and Chen, we introduce hyperbolic tangent function to deal with the term. Define
where ϑ is a positive design parameter. Note that exists, thus the nonlinear function can be approximated by an FLS such that
then, by using
where is an unknown parameter and is the upper bound of . We can have
in order to obtain the control laws αi,d, now, define the boundary layer errors as
where
using gives that
substituting (50) into (49) yields that
then, choose the control laws defined as follows
where li is a positive design parameter. Moreover, combining (53) to (56) gives that
Remark 4
By (47) and (48), we can see that all the unknown time-delay terms are lumped into one unknown nonlinear function , thus only one FLS is used to approximate it. Furthermore, by using the technique such that only one unknown parameter β1 needs to be adjusted, which reduces the online computation burden greatly and makes our design scheme easier to be implemented in practical applications.
Then, consider the following Lyapunov function
the time derivative of is given by
choose the adaptive laws as follows
where σ1, σ2, σ3, , and are all positive design parameters and .
Remark 5
From (60), it can be seen that the function is nonnegative. This implies that if , then . Consequently, decreases until . So, for any given initial condition , holds for all t > t0.
Then, using yields that
moreover, we have
combining (62) and (63) yields that
According to assumption 4 gives that , thus we can obtain
where .
Assumption 6
23 For all initial conditions, there exists positive constant p satisfying .
According to and assumption 6 gives that
then, from (54) and (55) yields that
where χi is a continuous function. For any B0 > 0 and p > 0, the sets and are compact in R3 and R8, respectively; therefore, Π × Π1 is also compact in R11, and χ1 has a maximum M1 on Π × Π1. Similarly, the sets and are compact in R3 and , respectively; therefore, Π1 × Πi is also compact in and χi has a maximum Mi on Π1 × Πi. Using with τ being a positive design parameter gives that
choosing yields that
Stability analysis
Before proposing the main theorem, we first introduce the following lemma
Lemma 3
Consider the set Ωϑ defined by . Then, for any , the inequality is satisfied.28
The main results are summarized as follows.
Theorem 1
Consider the closed-loop system consisting of system (1) under assumptions 1 to 6, the control laws (54) to (56), and the parameter adaptive laws (60) to (61). Suppose that the packaged uncertain function can be approximated by the FLSs in the sense that approximation errors are bounded. Then, there exists li, τi, σ1, σ2, σ3, , and such that the solution of the closed-loop system is SUUB, and the steady-state tracking error is smaller than a prescribed error bound.
In the following, similar to the above discussion, the proof process is also divided into two cases.
Case 1. . In this case, Since , the boundedness of yr and z1, we can obtain that x1 is bounded. Then, according to lemma 3 yields that . Moreover, since is a continuous function of the variable x1, we obtain that is bounded. Let , thus
combining (69) with (70) gives that
Now, choose and with l* and being positive constants, then we have
where and Let , then on . Thus, is an invariant set, that is, if , then for all t ≥ 0. Therefore, (72) holds for all and all t ≥ 0. Solving (72) gives that which means that eventually is bounded by . Furthermore, the boundedness of , , zi(t), ei(t), , , and yi are obtained. In addition, according to the boundedness of the signals θi, β1, c, ε1, ωi gives that , , c, , and are all bounded, and from (54) to (56) yields that and υ are all bounded. Finally, from (51), the boundedness of αi is ensured for
Case 2. . In this case, According to lemma 3 gives that Similar to (72), we obtain
where and . Then, similar to case 1, the boundedness of all the signals in the closed-loop can be proven.
This concludes the proof.
Simulation
In this section, to illustrate the validity of the proposed scheme, consider the following nonlinear time-varying delay system
In this simulation, we choose , , , and . The upper bounds of them are d1 = 1.4 and d2 = 1.4. The simulation objective is to apply the developed adaptive fuzzy controller such that (1) boundedness of all the signals in the closed-loop system is guaranteed and (2) the system output y follows the reference signal yr to a small neighborhood of zero with .
Choose the first intermediate control function a1,d as (54) and the input of the backlash-like υ(t) as (56) and the parameter update laws as (60) and (61), respectively. Given the symmetric positive matrix , ε = 75, ψ = 12.5 and L1 = L2 = 0.02, by solving LMI (18), the symmetric positive matrix P and observer gain matrix K are obtained as and . The initial states are chosen as , y1(0) = 0, , ε1(0) = 0.001, , , and . Then, select the design parameters as η = 0.5, κ = 0.1, λ = 0.5, l1 = 299, l2 = 300, ς = 0.0028, , , , σ1 = 0.2, and σ3 = 0.2. Furthermore, when , for i = 1, 2, j = 1, 2, choose x1(t) = x2(t) = 0. Membership functions are specified as .
represents an output of the following backlash-like hysteresis
where α = 6, c = 3.1635, and B1 = 0.345.
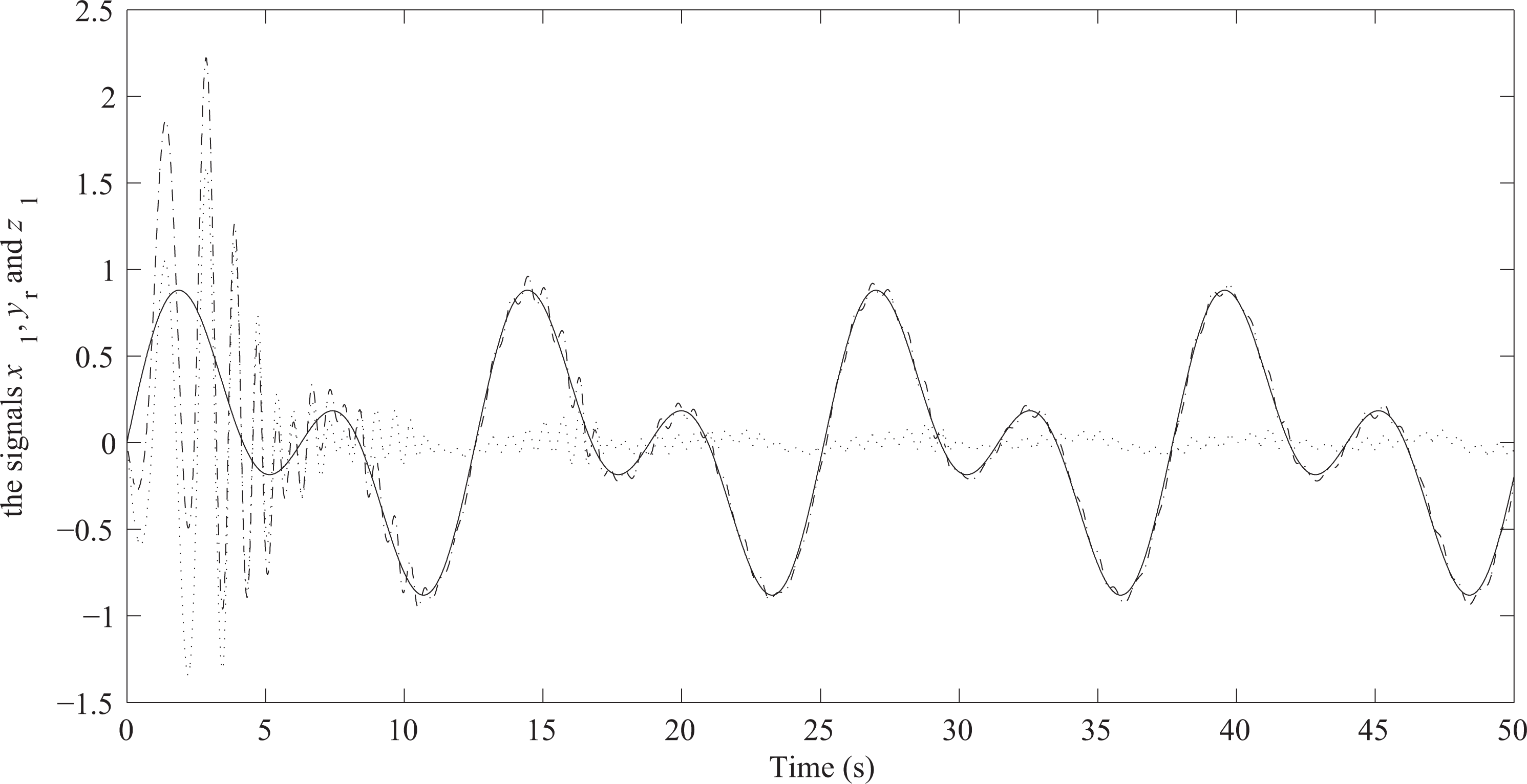
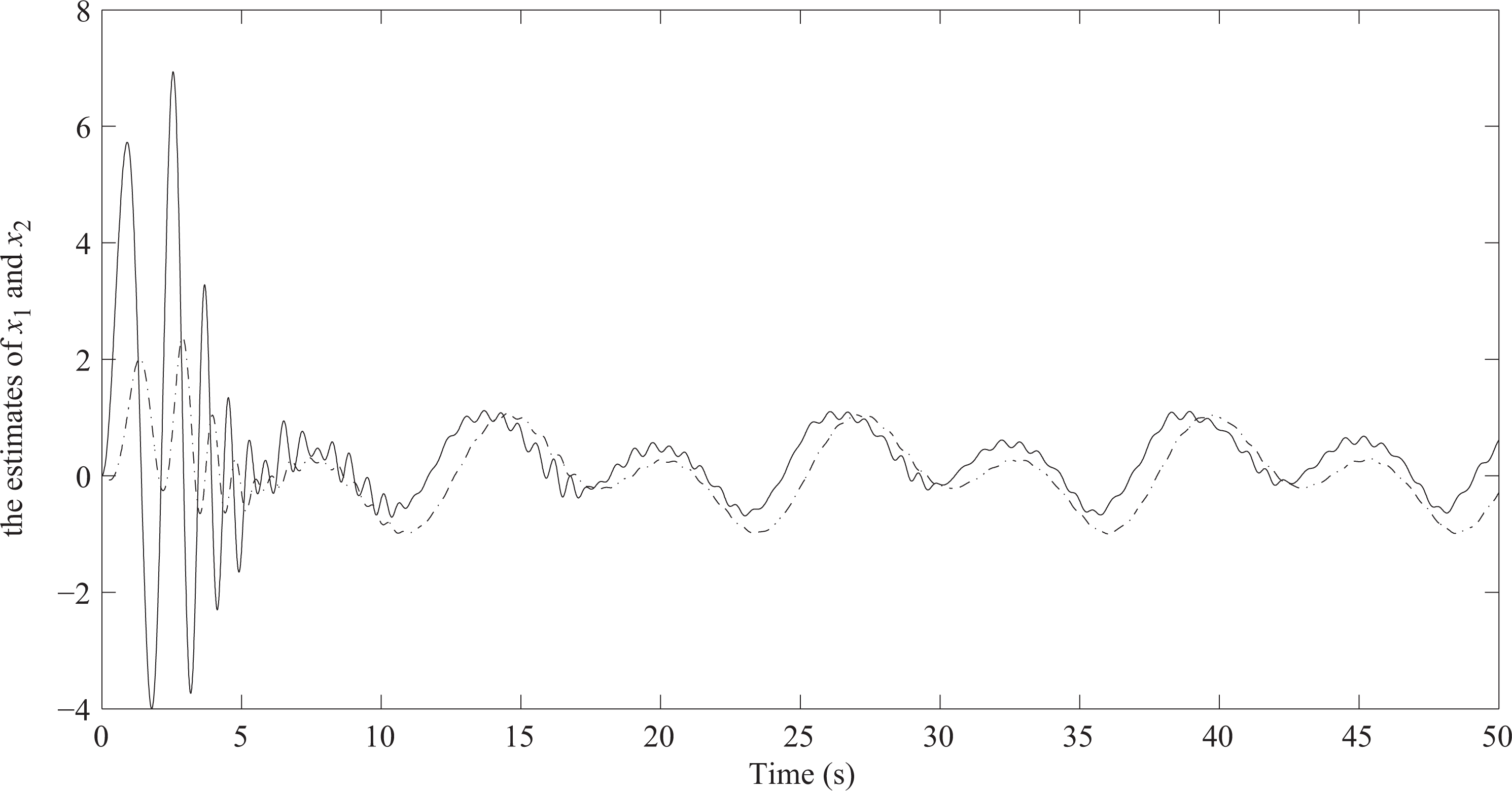
The simulation results are shown in Figures 1to 7, where Figure 1 illustrates the trajectories of the tracking error, the output, and tracking signals; Figures 2 and 3 exhibit the boundedness of the trajectories of , , and υ(t); and Figure 4 shows that and are all bounded. Finally, in Figures 5to 7, the boundedness of , , and are illustrated, respectively.
The trajectories of x1, yr (solid line) and z1 (dot line).
The signals (dash–dot line) and (solid line).
The signal υ(t).
The signals (dashed line) and (solid line).
The trajectory of .
The trajectory of .
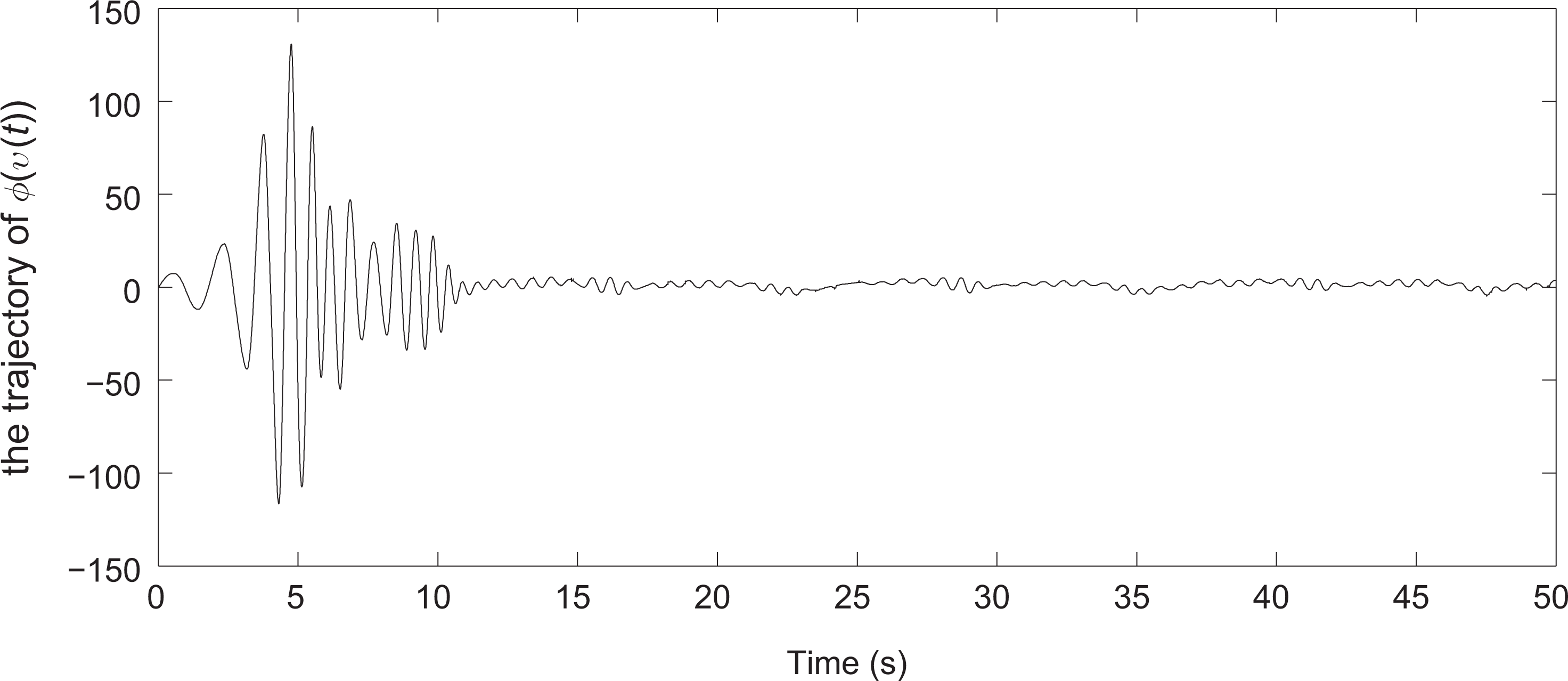
The trajectory of .
Conclusion
In this article, based on an appropriate observer, an adaptive fuzzy DSC control scheme is presented for a class of nonlinear time-varying delay systems with unknown backlash-like hysteresis. By choosing appropriate Lyapunov–Krasovskii functionals, the adaptive output-feedback fuzzy controller is designed. The proposed adaptive fuzzy controller guarantees that the closed-loop system is stable in the sense of SUUB. Moreover, all the unknown time-delay terms are lumped into one unknown nonlinear function which can be approximated by only one FLS such that the suggested adaptive fuzzy controller contains less adaptive parameters and this makes our design scheme easier to be implemented in practical applications. The simulation results have been given to illustrate the effectiveness of the proposed scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project is supported by the Special Funds of the National Natural Science Foundation of China (11626183, 11661066), Shaanxi Province Natural Science Fund of China (2017JQ6059, 2016JM1035), Youth Foundation of Xi’an University of Architecture and Technology (QN1436), and Talent Foundation of Xi’an University of Architecture and Technology (RC1425).
References
1.
MatveevASHoyMKatupitiyaJ. Nonlinear sliding mode control of an unmanned agricultural tractor in the presence of sliding and control saturation. Rob Auton Sys2013; 61(9): 973–987.
2.
ZhangTPGeSS. Adaptive neural control of MIMO nonlinear state time-varying delay systems with unknown dead-zones and gain signs. Automatica2007; 32(6): 1021–1033.
3.
ShafieiSESoltanpourMR. Robust neural network control of electrically driven robot manipulator using backstepping approach. Int J Adv Rob Sys2009; 6(4): 285–292.
4.
WangLX. Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Englewood Cliff, New Jersey: Prentice-Hall, 1994.
5.
QinLLiuFCLiangLH. Fuzzy adaptive robust control for space robot considering the effect of the gravity. Chin J Aeronaut2014; 27(6): 1562–1570.
6.
BakdiAHentoutABoutamiH. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Rob Auton Sys2017; 89: 95–109.
7.
Cazarez-CastroNRAguilarLTCastilloO. Designing type-1 and type-2 fuzzy logic controllers via fuzzy Lyapunov synthesis for nonsmooth mechanical systems. Eng Appl Artif Intel2012; 25(5): 971–979.
8.
Cazarez-CastroNRAguilarLT,CastilloO. An observer for the type-1 fuzzy control of a servomechanism with backlash using only motor measurements. Soft Comput Intell Control Mobile Robo2011; 318: 405–421.
9.
Cazarez-CastroNRAguilarLT,CastilloO. Fuzzy logic control with genetic membership function parameters optimization for the output regulation of a servomechanism with nonlinear backlash. Expert Syst Appl2010; 37(6): 4368–4378.
10.
SuCYStepanenkoYSvobodaJ. Robust adaptive control of a class of nonlinear systems with unknown backlash-like hysteresis. IEEE Trans Autom Control2000; 45: 2427–2432.
11.
ShahnaziRParizN,KamyadAV. Adaptive fuzzy output feedback control for a class of uncertain nonlinear systems with unknown backlash-like hysteresis. Commun Nonlin Sci Numer Simul2010; 15: 2206–2221.
12.
WenCYZhouJ. Decentralized adaptive stabilization in the presence of unknown backlash-like hysteresis. Automatica2007; 43: 426–440.
13.
BoulkrouneAMSaadandM,ChekirebH. Design of a fuzzy adaptive controller for MIMO nonlinear time-delay systems with unknown actuator nonlinearities and unknown control direction. Inform Sci2010; 180: 5041–5059.
14.
WangCHWangJH,ChenCY. Analysis and design of indirect adaptive fuzzy controller for nonlinear hysteretic systems. Int J Fuzzy Sys2015; 17(1): 84–93.
15.
LiYMTongSC,LiTS. Adaptive fuzzy output feedback control of uncertain nonlinear systems with unknown backlash-like hysteresisInform Sci2012; 198: 130–146.
16.
LiYMTongSC,LiTS. Adaptive fuzzy output feedback control of nonlinear uncertain systems with unknown backlash-like hysteresis based on modular design. Neural Comput Appl2013; 23: 261–270.
17.
LiYMTongSC,LiTS. Adaptive fuzzy output feedback control of MIMO nonlinear uncertain systems with time-varying delays and unknown backlash-like hysteresis. Neurocomputing2012; 93: 56–66.
18.
CuiGZXuSYZhangBY. Adaptive tracking control for uncertain switched stochastic nonlinear pure-feedback systems with unknown backlash-like hysteresis. J Franklin Inst2017; 354: 1801–1818.
19.
SwaroopDGerdesJCYipPP. Dynamic surface control of nonlinear systems. Proceedings of American Control Conference, Albuquerque, NM, USA, 6 June 1997, 3028–3034, IEEE.
20.
SwaroopDHedrickJKYipPP. Dynamic surface control for a class of nonlinear systems. IEEE Trans Autom Control2000; 45(10): 1893–1899.
21.
ZhangTPGeSS. Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure feedback form. Automatica2008; 44(7): 1895–1903.
22.
WangMLiuXP,ShiP. Adaptive neural control of pure-feedback nonlinear time-delay systems via dynamic surface technique. IEEE Trans Sys Man Cybern B Cybern2011; 41(6): 1681–1692.
23.
TongSLiYFengG. Observer-based adaptive fuzzy backstepping dynamic surface control for a class of non-linear systems with unknown time delays. IET Control Theory Appl2011; 5(12): 1426–1438.
24.
TongSCLiYMFengG. Observer-based adaptive fuzzy backstepping dynamic surface control for a class MIMO nonlinear systems. IEEE Trans Sys Man Cybern B Cybern2011; 41(4): 1124–1135.
25.
TongSCLiYLiYM. Observer-based adaptive fuzzy backstepping control for a class of stochastic nonlinear strict-feedback systems. IEEE Trans Sys Man Cybern B Cybern2011; 41(6): 1693–1704.
26.
ZhangXLinY. An adaptive output feedback dynamic surface control for a class of nonlinear systems with unknown backlash-like hysteresis. Asian J Control2013; 15(2): 489–500.
27.
WangMChenBLiuKF. Adaptive fuzzy tracking control of nonlinear time-delay systems with unknown virtual control coefficients. Inform Sci2008; 178: 4326–4340.
28.
WangMChenB. Adaptive fuzzy tracking control for a class of perturbed strict-feedback nonlinear time-delay systems. Fuzzy Sets Sys2008; 159: 949–967.
29.
TongSCLiYM. Observer-based fuzzy adaptive robust control of nonlinear systems with time delays and unmodeled dynamics. Neurocomputing2010; 74: 369–378.
30.
TongSCLiYMXiaYQ. Adaptive fuzzy backstepping output feedback control of nonlinear time-delay systems with unknown high-frequency gain sign. Int J Autom Comput2011; 8(1): 14–22.
31.
KarimiHR. Adaptive H∞ synchronization of master-slave systems with mixed time-varying delays and nonlinear perturbations: an LMI approach. Int J Autom Comput2011; 8(4): 381–390.
32.
XuSChenT. An LMI approach to the H∞ filter design for uncertain systems with distributed delays. IEEE Trans Circuits Sys II Exp Briefs2004; 51(4): 195–201.
33.
XuSLamJChenT. A delay-dependent approach to robust H∞ filtering for uncertain distributed delay systems. IEEE Trans Sig Process2005; 53(10): 3764–3772.
34.
YueHYLiJM. Adaptive fuzzy dynamic surface control for a class of perturbed nonlinear time-varying delay systems with unknown dead-zone. Int J Autom Comput2012; 9(5): 545–554.
35.
LiYMRenCE,TongSC. Adaptive fuzzy backstepping output feedback control for a class of MIMO time-delay nonlinear systems based on high-gain observer. Nonlin Dyn2012; 67(2): 1175–1191.
36.
LiYLiYM,TongSC. Adaptive fuzzy decentralized output feedback control for stochastic nonlinear large-scale systems. Neurocomputing2012; 83: 38–46.