
Abstract
In order to realize intelligent and autonomous navigation, a bio-inspired method of autonomous positioning using spatial association based on place cells firing is proposed. First, a vision sensor is used to get the landmarks in the environment and the distances between the agent and the different landmarks so as to construct an internal map of place cells. Then, we build a relationship between the distances and the activities of place cells using a radial basis function neural network, and further achieve the memory and association of spatial locations by comparing the activities of all place cells. Finally, we also provide a detailed analysis on the feasibility of this method for autonomous positioning and how the involved parameters in the model have an influence on the performance of positioning. The result of simulation shows that the method presented is effective and feasible for autonomous positioning.
Introduction
With the rapid development of unmanned vehicle, the intelligent and autonomous performance of the navigation system has been the subject of intensive interest. The brain, as a best manifestation of intelligence and cognition, has a unique capability of autonomous navigation in the complex and dynamic environment. 1 –3 The Nobel Prize in physiology for 2014 reveals a special navigation system in brain. 4 O’Keefe, one of the winners, finds a kind of special neural cell of which the firing intensity has a strong correlation with the position of the rat and is then called place cell (PC). He thinks the brain is able to form a cognitive map in which every place is characterized by the corresponding PC. 5 With the discoveries of the head directed cells, 6,7 grid cells, 8,9 the boundary cells 10 and the speed cell 11 in the brain, the mechanism of biological brain navigation has been further explained. The combined effect of these cells forms an accurate navigation system of the brain, which is like a Global Positioning System (GPS) system that can provide the navigation information at any moment.
For the study on the various navigation cells in the brain, the researchers are more interested in how to use the important achievements in the field of brain science and life science to solve the practical problems of navigation. 12 –15 However, current studies 16 –19 about the biological PCs mostly focus on new discoveries and mechanisms of biological navigation, which have no realization in physical level. Giovannangeli and Gaussier 20 proposed a method of autonomous vision-based navigation for goal-oriented action planning, which combines the visual information with the activities of PCs. This model mainly focuses on the path planning and pays a little attention to the mechanism of PCs firing. Besides, the method relies on the measurement accuracy of the magnetic compass and the degree of object recognition, which has high computational complexity. The work in the study by Jauffret et al. 21 builds a multimodal biological model for robot navigation by integrating the perceptual information of self-motion with the activities of visual PCs. The results of simulations and experiments confirm that the model is able to complete the navigation task in small indoor environment. But this method is considered from the perspective of function simulation and implementation, which is not in line with the biological foundation about brain navigation. Gordon 22 presents a RatSLAM algorithm to realize autonomous positioning, which defines the pose cell, local view cells and experience map to help the agent to represent the spatial environment. But the cells defined in the model are supposed and not existed in animals or human. The method is applied in the limited environment and has a poor real-time performance.
In this article, we learn from the mechanism of biological navigation in hippocampus and propose a bio-inspired method of autonomous positioning using spatial association based on PCs firing. The radial basis function (RBF) neural network is introduced to build a connection between the visual sensory information and the firing activities of PCs. The agent is able to estimate the location in the environment by sensing the landmarks and driving the PCs fire. This method is a prototype simulation of PCs firing for autonomous positioning from the perspective of bio-inspired navigation. The rest of this article is arranged as follows. First, we introduce the character and firing rate model of the PC. Second, the method of autonomous positioning using spatial association is proposed and described in detail. Third, we demonstrate that the method presented is feasible by simulation and make an analysis on how the performance of positioning is influenced by the change of the corresponding parameters. Finally, a summary is given.
The firing model of PC
O’Keefe finds that there are some special neural cells in rat’s hippocampus of which activities are closely related to the spatial location of the rat. When the rat is in a narrow range, if some cell shows firing with a maximum frequency while in other places with little or no firing, then the cell is defined as ‘PC’ and the corresponding range of environment of the firing cell is called ‘firing field’ or ‘place field’. This particular firing activity of the cell helps the rat determine its position in the current environment. A single PC represents a location in the environment, while a particular environment can be characterized by the electrical activities of a number of PCs. Figure 1 shows a response diagram of the PCs in firing state in CA3. 23 It can be seen that there are some corresponding PCs firing when the rat moves in the environment and the intermediate region of PC has a maximum response while decreasing outwards in turn.
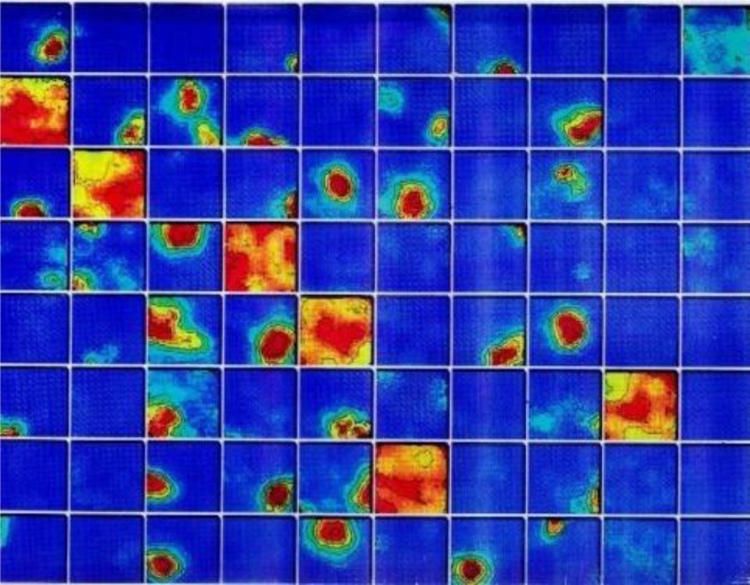
The response diagram of the place cells in firing state. 23
According to the shape of the response diagram, O’Keefe proposes to use Gaussian function to imitate the firing PC. Let

where

The distribution of a simulated place cell.
The method of autonomous positioning using spatial association
From the introduction of the previous section, we know that the biology describes the spatial location by the way of the PCs firing in hippocampus. Learning from biological navigation mechanism, a bio-inspired method for autonomous positioning by spatial association is proposed in this article. First of all, a vision sensor is used to detect the landmarks and get the distances between the agent and the different landmarks. Then, an internal map of PCs is constructed to represent the location. Furthermore, a relationship between the distances and the activities of PCs in firing state is built so as to generate a function for spatial representation.
The neural network has a strong capability of nonlinear fitting and is similar with the working mechanism of the biological brain.
24
–26
Since we have achieved the distances between the agent and the different landmarks as the input and the firing rates of PCs as the output, the supervised learning network is adopted. RBF neural network, as one of the supervised learning network, has an advantage in convergence speed, approaching performance and classification capability.
27
So we decide to use the RBF neural network to link the distances with the firing rates of PCs and complete autonomous positioning using spatial association. Concrete steps are as follows.
Step 1. Setting spatial environment
Suppose the moving area of the agent in the environment is covered by a a × a square. In order to represent the space, we establish a coordinate system and regularly set some points as the memory points. As shown in Figure 3, the space is uniformly compartmentalized along the x- and y-axes direction, respectively, at a certain interval. The red circle is the agent and the green triangle is the landmark. The agent’s location in the area can be represented by the concrete coordinate of the memory point which is characterized by solid black circle.

The schematic diagram of spatial environment setting.
Step 2. Establishing spatial correspondences between the location and the landmarks
N landmarks with uniform distribution in the environment are detected through the visual sensor and computer system (N ≥ 3, there are three landmarks at least which are not at the same line). The different locations of the agent in the area are coded by the distances between the agent and the different landmarks. For example, the location at time k is
Step 3. Constructing PCs for representing spatial location
The PCs are constructed evenly in the environment at a certain distance interval so that the entire environment can be covered by PCs through adjusting the distance interval. Thus, any location of the agent in the spatial environment can be represented by a corresponding PC in firing state. Figure 4 shows a schematic map of the constructed PCs.

A schematic map of the constructed place cells.
Suppose that (x, y) represents the real location of the agent in the environment and

Thus, the agent’s position in the space can be resolved by comparing the firing rate of different PCs. The position characterized by the cell with the maximum firing rate is the estimated position of the agent currently.
Step 4. Building a spatial memory model.
Based on steps 2 and 3, we integrate the distances between the agent and the different landmarks with the firing rates of all PCs at the memory points and use the RBF network for the information conversion. The least mean square algorithm is used to train and adjust the weights. As can be seen from Figure 5, the model is composed of three levels, which is, respectively, the input level, the output level and the hidden level. The inputs are the distances between the agent and the different landmarks at memory points, the outputs are the firing rates of all PCs and the hidden level is an RBF neural network. After learning, the parameters of the network can be confirmed so that the relationship between the inputs and the outputs is built and the spatial memory can be realized.

Spatial memory model.
Step 5. Positioning by perception and association
Memory information about locations of the agent in space can be obtained through above steps. Taking advantage of the constructed spatial memory model, we put the sensed real-time information about the distances between the agent and the different landmarks into the model and drive the PCs fire. The activities of PCs are the result of a matching function which is achieved by computing the distance between the learned set and the current set. Comparing the activities of all PCs, we can find the cell with the maximum firing rate and use the characterized position as the estimated position of the vehicle.
During the whole process, the agent realizes memory through sensing and learning from spatial environment and achieves autonomous positioning by associating spatial locations.
Results and discussion
Aiming at the method of spatial association for autonomous positioning proposed above, we make an analysis from two aspects in simulation, where the first is the simulative implementation of the model and the second is the discussion on how the parameters variety of the model involved has an influence on the performance of positioning. The conditions in simulation are set as follows: the moving area of the agent in spatial environment is a square with the size of 100 × 100 m2 and the mean square error is set to 0.0001 when using RBF network for training. The velocity and direction of the agent maintain invariable within each positioning cycle, and when the agent moves to the border region, it will be given a reverse direction and keep moving to the next location. All simulations are based on the platform of MATLAB R2010a.
Model implementation
First of all, the corresponding parameters involved in the simulation are set as follows. (1) The number of memory points: the space area is evenly divided along the x- and y-axes, respectively, forming 20 × 20 memory points in total like Figure 3. (2) Setting landmarks: choose four landmarks in spatial environment whose coordinates are (31,22), (63,44), (27,72) and (83,62). Then, the distances between the vehicle and the different landmarks at each memory point are calculated. (3) The number of PCs: the space area is evenly divided along the x- and y-axes, respectively, at the interval B = 5 m, forming 20 × 20 small square regions. Then, we use the centre of each small square as the reference points to construct the PCs, thereby forming 400 cells. Next, we use the RBF network to build the spatial memory structure where the inputs are the distances between the agent and the different landmarks at each memory point and the outputs are the firing rates of different PCs. Figure 6 gives the position error of each PC at the memory points where the error is defined as the difference between the association output and the real output. From Figure 6, we know that the result of the association output reflects the true position of the agent well, and the position error is very small. The mean position error of all PCs obtained from association is just 9.3558 × 10−5 m. Therefore, the model of spatial memory is feasible.
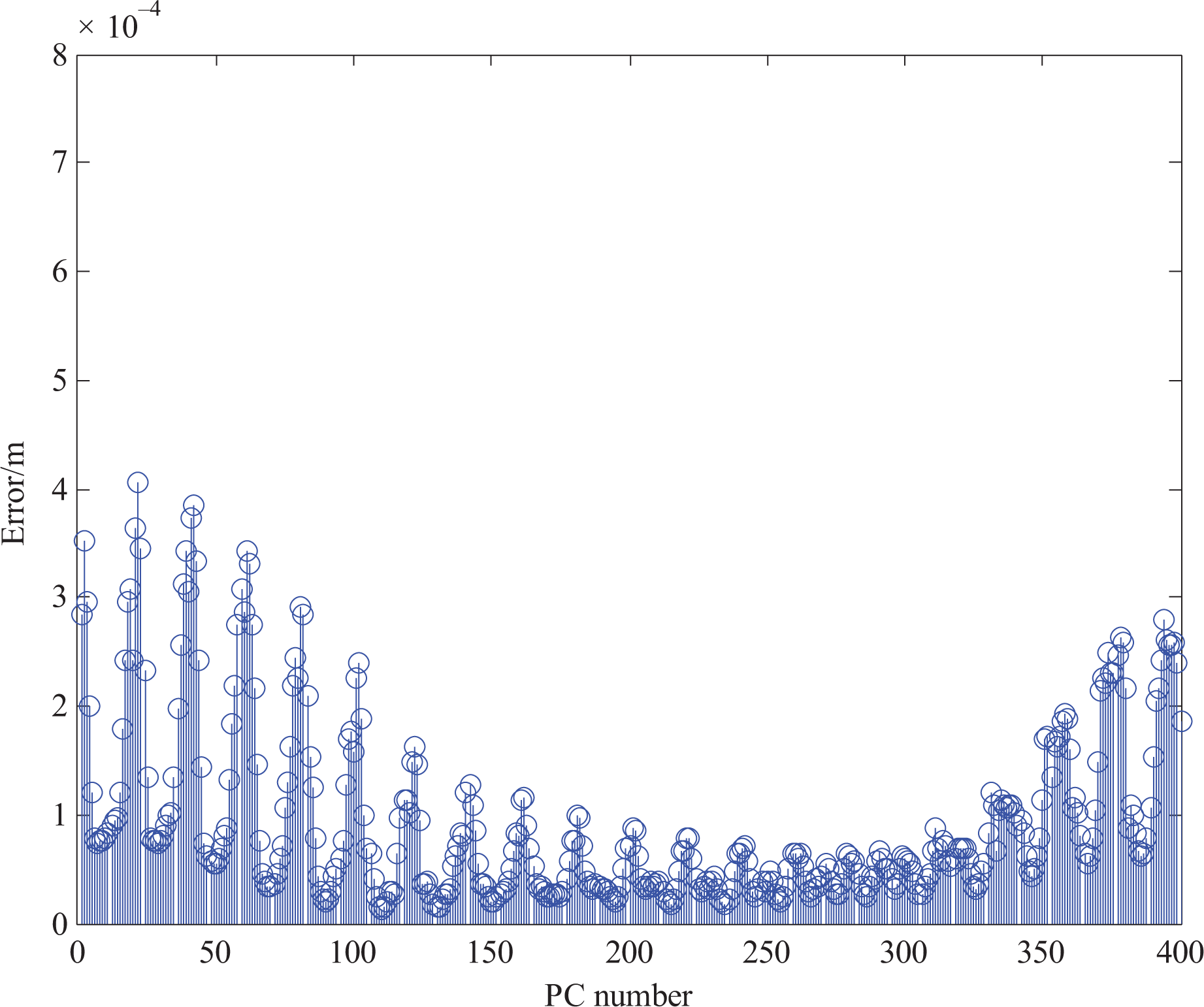
The position errors of place cells through association.
After that, we make an analysis of the positioning performance when the agent is moving arbitrarily in the environment. Suppose that the velocity of the agent is 10 m/s and the positioning period is 1 s. The agent puts the sensed real-time distances between the agent and the different landmarks into the constructed memory model and drives the PCs fire and then estimates the spatial position of the agent through association using the RBF network. Figure 7 shows a trajectory of the agent moving arbitrarily in the environment and the corresponding estimation obtained by memory association model. It can be seen that the agent has an ability to estimate its location in real time using the model of spatial memory association.

The positioning result through association.
To further illustrate the validity of the model, we make the agent move arbitrarily in the environment with 2000 s, while other simulation conditions remain invariable. Then, the position of the agent is estimated using the same method. Figure 8 shows the estimated result in real time and Figure 9 gives a graph of the positioning error at each time. It can be seen from Figures 8 and 9 that the agent can complete to estimate the position well during the whole moving process, and the positioning error is controlled below 4 m and the average positioning error reaches 1.3162 m approximately. Therefore, using this model of spatial association for autonomous positioning is effective and feasible.

The estimated positioning result in real time.
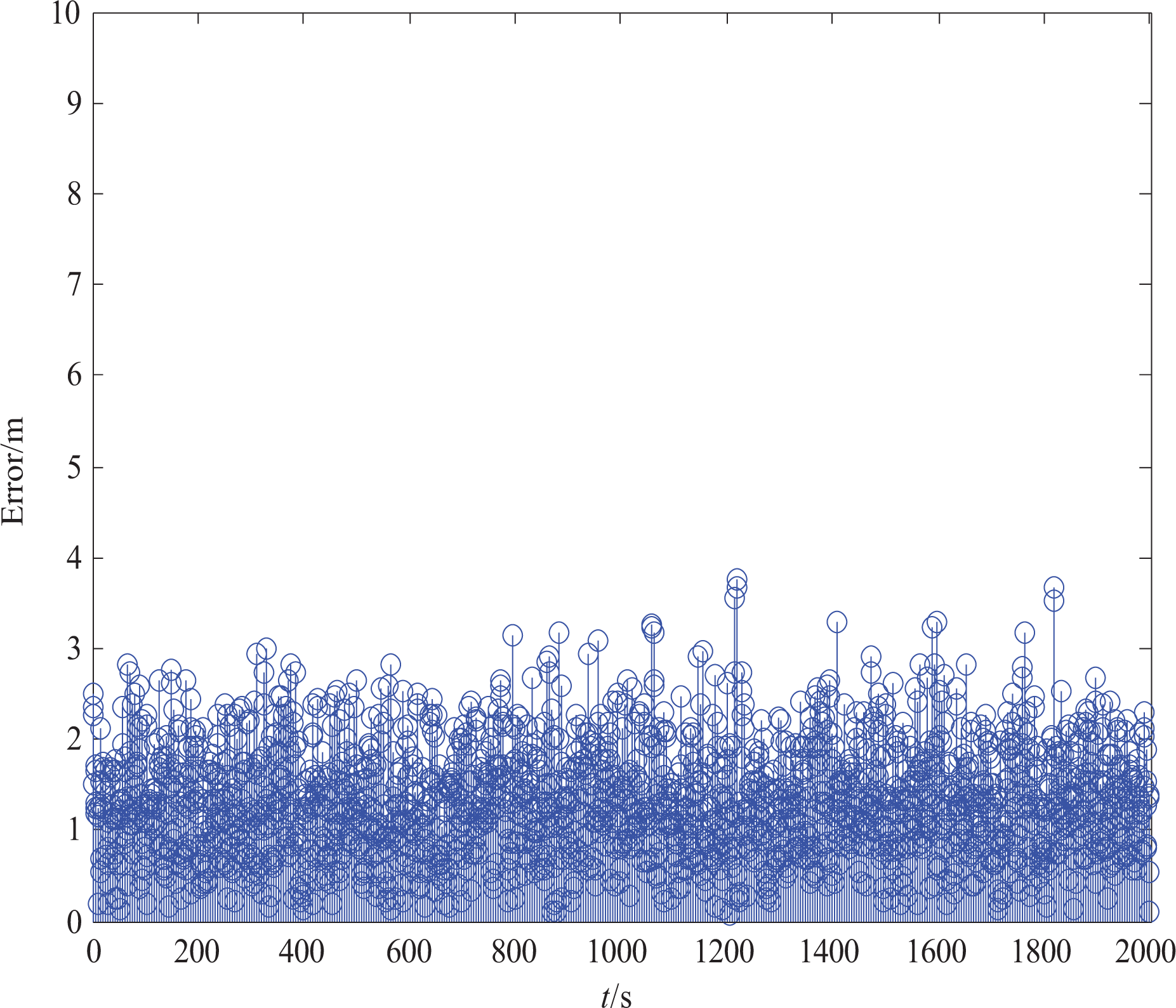
The positioning errors in real time.
Positioning performance influenced by relevant parameters
From the process of constructing the spatial association model, we know that the main parameters of the model are the number of memory points, landmarks and PCs. So, we make a discussion on how the change of three parameters has an impact on the positioning result.
The number of landmarks
The variety of the number of landmarks influences the input of the spatial memory model, which leads to get a different correspondence on RBF network. So it is necessary to analyse the positioning performance under the situations with different landmarks number. The simulation sets the number of landmarks from 4 to 12, and the number of the memory points and the number of PCs are, respectively, 100 and 400. The agent moves arbitrarily in spatial environment. The velocity is 10 m/s and the positioning period is 1 s. The moving time is 2000 s. Then, we calculate the positioning mean error and the standard deviation under different number of landmarks and analyse the positioning result. Table 1 gives the result of positioning error under different number of landmarks and Figure 10 shows the corresponding error graph. It can be seen that the positioning error is not influenced by the number of landmarks on condition that the number of memory points and PCs are certain. With the number of landmarks increasing, the positioning mean error and the standard deviation only have a small decrease in amplitude. Because three different landmarks which are not at the same line can uniquely ensure the location of the agent, so the positioning error is almost invariable as long as more than three landmarks can be detected by rule and line.
Positioning error under different number of landmarks.


Positioning error trend with the number of landmarks increasing.
The number of PCs
The change of PCs number affects the construction of spatial memory model and also influences the performance of positioning through association. In this simulation, we build the PCs evenly in spatial environment at different distance intervals and choose four landmarks like ‘Model implementation’ section and 100 memory points. Other simulation parameters are the same as ‘The number of landmarks’ section. Suppose that the agent moves arbitrarily in spatial environment. Aiming at different number of PCs, each situation conducts 2000 times positioning through association. Then, we analyse the positioning performance under different number of PCs through calculating the positioning mean error and the standard deviation. Table 2 gives the result of positioning error under different number of PCs and Figure 11 shows the corresponding error graph. As can be seen, the positioning mean error and standard deviation are gradually reduced with the number of PCs increasing. When the number of PCs reaches 400, the positioning mean error is 2.7393 m and the standard deviation is 1.2990 m. When the number of PCs continues to increase, the positioning mean error only has a small decrease in amplitude and the improvement of positioning performance is not obvious. Therefore, the number of PCs has a great impact on the result of association output under a certain range. In specific implementation, it is necessary to choose the number of PCs reasonably according to the actual situation.
Positioning error situation under different number of PCs.

PC: place cell.
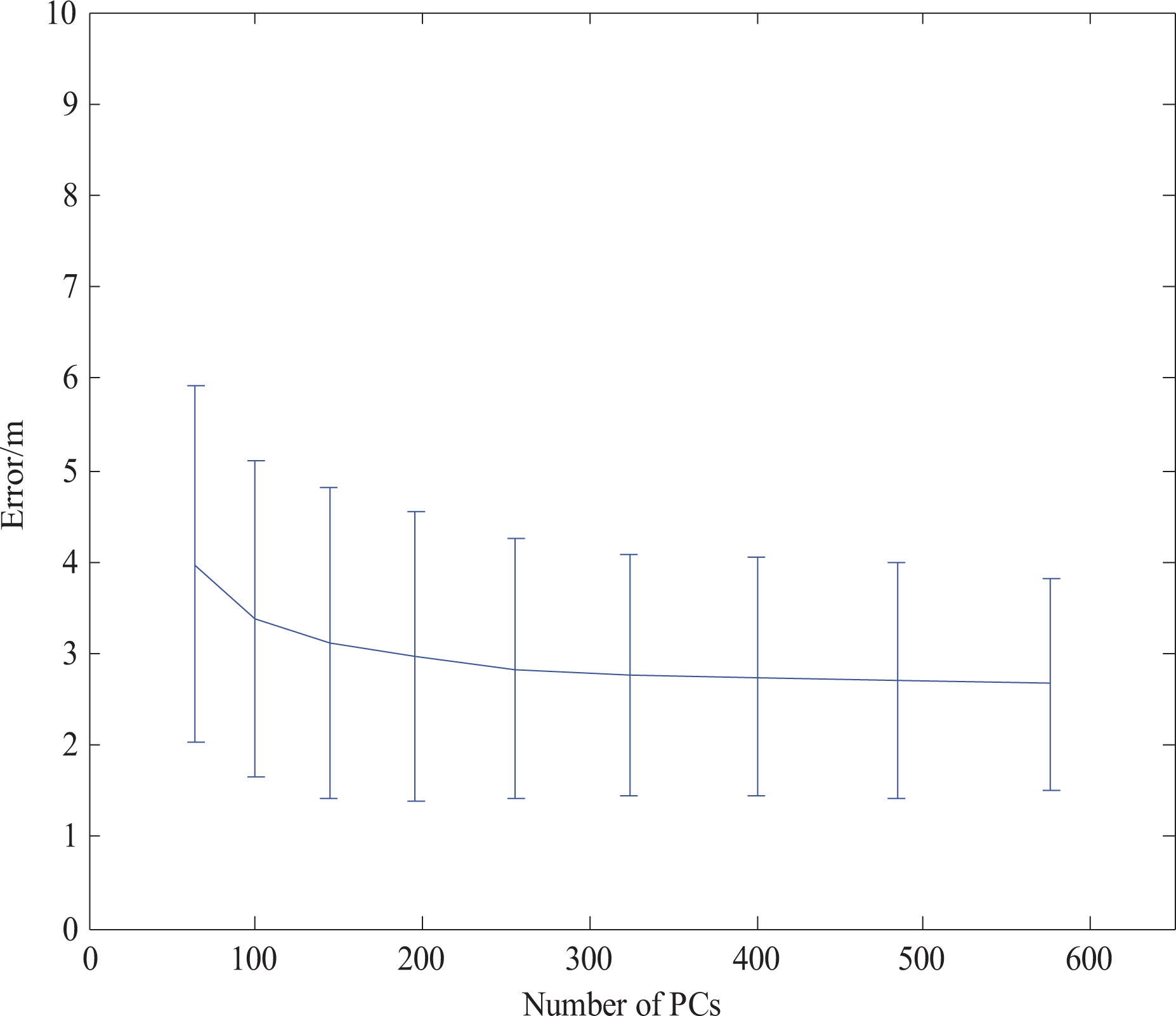
Positioning error trend with the number of place cells increasing.
The number of memory points
In this simulation, we separate the spatial area along the x- and y-axes, respectively, at different intervals and get the memory points distributed evenly. The number of landmarks is 4 as given in ‘Model implementation’ section and the number of PCs formed is 400. Other simulation parameters are the same as given in ‘The number of landmarks’ section. Suppose that the agent moves arbitrarily in spatial environment. In each case, we conduct 2000 times positioning through association. Then, we analyse the performance of positioning under the situations of different number of memory points through calculating the positioning mean error and the standard deviation. Table 3 gives the result of positioning error under different number of memory points and Figure 12 shows the corresponding error graph. With the number of memory points increasing, on the premise that the number of PCs is unchangeable, the positioning mean error and standard deviation decrease gradually. When the number of memory points is more than 256, the positioning mean error and the standard deviation only have a small decrease in amplitude, and the improvement of positioning performance is not significant. Therefore, the number of memory points should be set reasonably according to the actual situation.
Positioning error situation under different number of memory points.


Positioning error trend with the number of memory points increasing.
In summary, the model of spatial memory association for autonomous positioning is feasible. When moving in spatial environment, the agent can use the vision sensor to get the landmarks and sense the distances between itself and the different landmarks so as to drive the PCs fire. Then according to the firing rates of all PCs, the agent can estimate its position through association using the RBF network. This method imitates in a certain extent biological intelligent navigation with a capability of memory and association. In specific implementation, it is necessary to choose the number of landmarks, PCs and memory points reasonably according to the actual situation.
Conclusions
The discovery of biological PCs exhibits strong sensitivity to specific location in the course of navigation and makes researchers be looking for a model that can imitate the function of PCs and further apply it to autonomous navigation. This article presents a method of autonomous positioning, which uses the RBF network to build a spatial memory model based on the mechanism of PCs firing so as to imitate a way of biological intelligent navigation with a capability of cognition. The result of simulation shows that the proposed method can succeed to realize autonomous positioning and the involved parameters, such as the number of landmarks, PCs and memory points, should be set reasonably with the comprehensive consideration of the actual situation from the need of positioning accuracy and computing time.
Footnotes
Author note
Jia Du is now affiliated with Xi’an Communications Institute, Xi’an, Shaanxi, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Natural Science Foundation of China under grant numbers 61273048 and 61473308.