
Abstract
A task-priority redundancy resolution with restoring moments optimized on acceleration level for the underwater vehicle-manipulator system is investigated in this article. Redundant resolution is a key and difficult problem in underwater vehicle-manipulator system’s trajectory planning. Firstly, kinematic modeling and dynamic modeling based on Lagrange method are studied. To overcome acceleration’s sudden change in traditional task-priority method, a new redundancy resolution method on the acceleration level is proposed. In this approach, a scalar potential function is established and used for reducing the effect of restoring moments by applying gradient projection. Finally, simulation is performed to verify the effectiveness of the proposed approach by comparing with traditional approaches.
Introduction
Underwater robots nowadays are playing a more and more important role in the field of ocean exploitation. Cable remote controlled submersible, known as remote operated vehicle, is relatively mature however very limited physically. 1 Autonomous underwater vehicle (AUV), which is capable of extending navigation range with higher intelligence, will be used more widely. 2 However, AUV lacks the ability to carry out the intervention task. So AUV’s application has many limitations. Underwater vehicle-manipulator system (UVMS), which is based on AUV and equipped with one or more manipulators, is a kind of more practical submersible. Compared to AUV, UVMS has enhanced the operational capacity and made its application value to be further improved.
Because of kinematic redundancy, dynamic coupling, and interference from the outside environment, it is very difficult to determine the optimal trajectory during the executing tasks. For the UVMS with limited energy, a reasonable trajectory can improve the performance on saving energy and increasing its duration. Redundancy resolution of UVMS, which determines UVMS’s position, velocity, and acceleration during the task, is an important part of trajectory planning. Definitely, a reasonable redundancy resolution method is able to ensure the stability of the system, meanwhile, reduce the external interference as much as possible. Therefore, it is of great significance to study the redundancy resolution method for UVMS trajectory planning.
For a UVMS with kinematic redundancy, there are infinite solutions of inverse kinematics. One of the methods is to obtain the least squares solution using Moore–Penrose pseudoinverse of Jacobian matrix. 3,4 The physical meaning of least square solution is that the solution makes the two-norm of generalized velocity vector minimum. 5 Usually, there is big difference between the mass of the vehicle and manipulator. For a UVMS whose energy is limited, the movement of the vehicle should be as small as possible, meanwhile, fulfills the requirements of performance. It is a common method to assign weights between degrees of freedom (DOFs). The motion amplitude of different DOFs can be adjusted by changing the values of the weight matrix. If the weight matrix is taken as the inertia matrix, then weighted least square solution reaches minimal kinetic energy physically. This approach is not suitable for UVMS’s trajectory planning since hydrodynamic forces are not considered in this approach.
Because of the underwater environment, hydrodynamic force is the key factor affecting the movement of the system. Its impact on the system cannot be ignored in redundancy resolution. Gradient projection method (GPM) is one of the methods that often used to solve this problem. The GPM has been successfully applied to the optimization of fluid drag force, obstacle avoidance, and torque optimization. 6 –9 In this method, a scalar potential function to be optimized is established firstly and then its negative gradient is projected into the inverse kinematics solution by means of the null space operator. In the study by Ji et al., 10 zero moment point equation is chosen as the function to be optimized. That means the propulsion energy for controlling the vehicle’s motion can be reduced. The restoring moments have been optimized using GPM in the studies by Ismail and Dunnigan 11 and Han and Chung, 12 and results are verified by simulation examples.
Antonelli and Chiaverini 13 developed a task-priority redundancy resolution for UVMS. Afterward, Soylu et al. 14 have proposed a revised task-priority approach that is able to avoid singular configurations of the manipulator. Targets are divided into priority task and secondary task. Task-priority method completes the secondary task while ensuring the completion of the priority tasks. When the two tasks conflict, the secondary task is released to allow fulfillment of the primary task.
However, all these three methods have some deficiencies. The hydrodynamic factors of UVMS are not considered in weighted generalized inverse method. For GPM, it is difficult to determine its gradient amplification coefficient, so the optimal result cannot be reached. The task-priority method is well developed because of its practical significance. However, the relationship between the secondary task and the optimization target is usually hard to determine. Besides, traditional resolution on velocity level often leads to abrupt change of acceleration and discontinuity of the velocity. In this article, a task-priority redundancy resolution on acceleration level is introduced, and the secondary task is replaced by optimization function which using GPM approach. Such system performance can be improved while the priority task is ensured. The effectiveness of the approach is verified by simulations.
This article is organized as follows. In the next section, the kinematic and dynamic modeling of the UVMS is introduced. Then, a task priority with restoring moment optimized solution of redundancy on acceleration level is proposed. Afterward, some numerical examples are carried out to validate the effectiveness of the proposed method. The last section holds the conclusion.
Kinematic and dynamic modeling of UVMS
Kinematic modeling
The UVMS system is usually made up of a vehicle and one or more manipulators. The coordinate system and some key vectors of a UVMS which is equipped with an n-DOF manipulator are shown in Figure 1. Here,

where

where

where

where


where

where


Coordinate systems of a UVMS. UVMS: underwater vehicle-manipulator system.
Matrix
Dynamic modeling
In this work, the dynamic modeling of the UVMS in the inertial frame is established through the second Lagrange equation which is expressed by

where
According to Antonelli, 15 dynamic equation of the UVMS can be written in a compact state-space form, which is the final outcome of solving equation (9). It is governed by

where


In equation (11),
The damping effect of the fluid cannot be ignored in UVMS’s dynamics. It can be considered as the sum of the drag force and the lift forces. The former is opposite to the relative velocity between the body and the fluid, while the latter are normal to it and they are supposed to act on the CM of the body. 16 For a completely submerged body, a simplified damping coefficients matrix which only consists of linear and quadratic terms is presented by 15

where
Vector

where



where
Generalized external force
Acceleration-level task-priority redundancy resolution approach with restoring moments optimized
Classical task-priority approach
Considering task-priority kinematics equation

where vector
The expression of task priority is represented in the form

where
Task-priority approach with restoring moments optimized on acceleration level
In order to avoid the discontinuity of acceleration, the task-priority method is extended to the acceleration level in this section. Meanwhile, in order to optimize the solution of redundancy, the GPM is used to optimize restoring moments which have a strong influence on both vehicle and manipulator.
By taking the derivative of equation (18) with respect to time, the kinematic equation on acceleration level can be expressed as

where matrix

Then using GPM, the inverse kinematic of equation (20) on acceleration level is in the form

where

Here,
In order to reduce the influence of restoring moment, here a positive definite scalar potential function is defined as

where

By amplifying the gradient ∇p(ζ) using a suitable amplification factor, the arbitrary vector

where κ is a gain coefficient. Because of the existence of numerical floating, the acceleration variable

where

Numerical examples
Simulation setup
Three numerical are carried out to verify the validity of the proposed approach in this section. Its expressions are as follows: inertia weight solution on velocity level inertia weight solution on acceleration level restoring moment optimized solution on acceleration level



The first one uses inertia weight resolution on velocity level whose weight matrix
Because capsizing is not allowed in the actual system during its manipulation operation, the priority task is selected as the position of end effector, vehicle pitch angle, and vehicle roll angle

In equation (29),
The data used for the simulation come from a physical UVMS which consist of a 6-DOFs vehicle and a 3-DOFs rotary joint manipulator. The specific parameters are displayed in Tables 1 and 2. The coordinate system of manipulator is shown in Figure 2.
D-H parameters of manipulator in UVMS.

UVMS: underwater vehicle-manipulator system.
Main parameters of UVMS.

UVMS: underwater vehicle-manipulator system.

Coordinate system of 3-DOFs manipulator. DOF: degree of freedom.
The initial generalized position vector is
Results and discussion
Figures 3 to 5 show the simulation results of three approaches mentioned above. In general, the three approaches have successfully completed the scheduled end effector trajectory.

History of inertia weight solution on acceleration level. (a) Translational velocity. (b) Rotational velocity. (c) Joint velocity. (d) Translational acceleration. (e) Rotational acceleration. (f) Joint acceleration. (g) Moving trail. (h) Restoring moments.

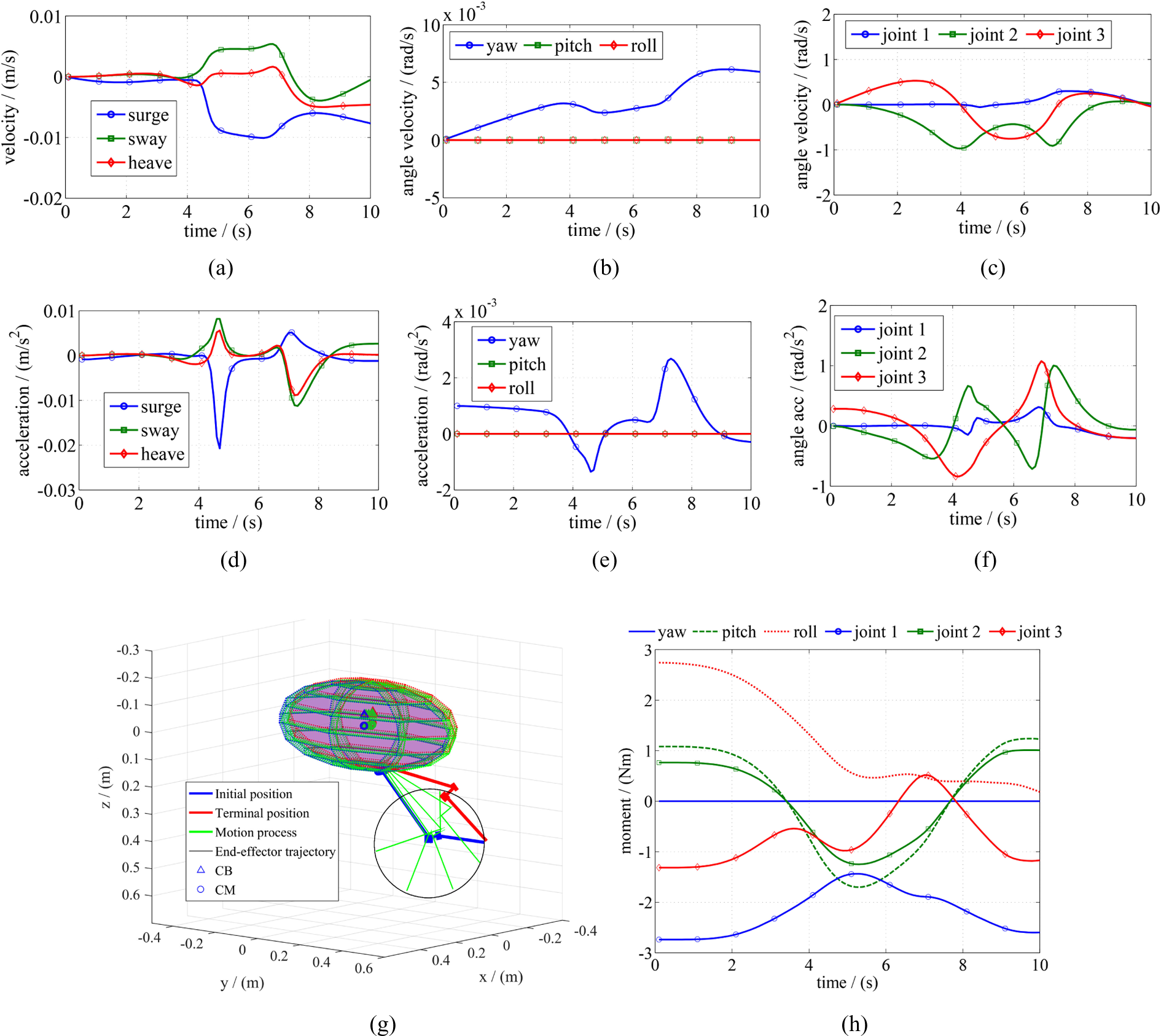
History of restoring moment optimized solution on acceleration level. (a) Translational velocity. (b) Rotational velocity. (c) Joint velocity. (d) Translational acceleration. (e) Rotational acceleration. (f) Joint acceleration. (g) Moving trail. (h) Restoring moments.
History of restoring moments two-norm ||G||.
The moving trail of inertia weight resolution on velocity level is shown in Figure 3(g). The advantage of approach 1 is that the minimal instantaneous kinetic energy is guaranteed during the travel using inertia matrix
However, there are obvious sudden changes, which are unfavorable for the control system, in vehicle and manipulator’s acceleration history. This problem can be solved by solving the redundancy on the acceleration level.
The simulation result of inertia weight resolution on acceleration level is shown in Figure 4. Similarly, the displacement of vehicle is much smaller than the manipulator’s. Meanwhile, because of using equation (29) as the priority task, the velocity and acceleration of vehicle pitch angle and roll angle approach zero so that the pose of the vehicle is able to remain stable. Most notably, there is no sudden change in acceleration, and the velocity curve becomes smoother. Comparing Figure 4(a) to (c) with Figure 3(a) to (c), respectively, the trajectory obtained by the redundancy resolution on acceleration level is smoother than one on velocity level. Meanwhile, there are smaller amplitude in both acceleration and velocity. It can be seen that the redundant resolution acceleration level can ensure the continuity of the acceleration, that is, smooths the velocity curve and reduces the impact of the system. So that the dynamic performance of system can be improved.
In case of restoring moment optimized approach, its simulation results are shown in Figure 5. As shown in Figures 4(g) and 5(g) intuitively, in case of restoring moment optimized approach, the vehicle movement is significantly decreased, as well as in the range of motion of the manipulator’s movement.
The change of restoring moments can be observed from the numerical curves in Figures 3(h) to 5(h). It can be observed that restoring moments on the joints, vehicle yaw angle, and vehicle pitch angle have the same trend, and there is no significant difference in the numerical value. It is worth to be mentioned that the maximum of amplitude of the pitch angle is reduced significantly. In the case of restoring moments optimized solution on acceleration level, moments on the vehicle roll angle decreases constantly and finally tends to zero. The optimization results are shown in Figure 6. The curves in Figure 6 are the histories of the restoring moments vector

History of inertia weight solution on velocity level. (a) Translational velocity. (b) Rotational velocity. (c) Joint velocity. (d) Translational acceleration. (e) Rotational acceleration. (f) Joint acceleration. (g) Moving trail. (h) Restoring moments.
Conclusion
A restoring moment optimized task-priority redundancy resolution approach on acceleration level for UVMS is proposed in this article. Firstly, considering the influence of the restoring torque and the viscous force, the kinematic and dynamic modeling of UVMS is established based on the second Lagrange equation. Then, the proposed task-priority approach is introduced and it replaces the process of determining the secondary task with the optimization of restoring moment using gradient projection. In order to verify the validity of the approach, simulation is carried out using real UVMS data. By comparing with cases 1 and 2, it can be found that the acceleration curve is smoother and the restoring moments’ two-norm is reduced in case 3. So far, the simulation results show that the proposed approach is feasible and effective in redundancy resolution of UVMS.
However, the proposed method has not been verified in the actual system. The future work will focus on transferring the work to real physical UVMS system and verifying the proposed method in detail and more practically. Still, the acceleration is not smooth enough using the redundancy resolution on acceleration level. The redundancy resolution on the jerk speed level will be researched in the following.
Footnotes
Acknowledgement
All financial supports for this work are highly appreciated.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Key Basic Research Project of “Shanghai Science and Technology Innovation Plan” under grant 15JC1403300, the National Natural Science Foundation of China under grants 61603277 and 51579053, the State Key Laboratory of Robotics and Systems (Harbin Institute of Technology), key project under grant SKLRS-2015-ZD-03, and the SAST Project under grant 2016017. Meanwhile, this work is also partially supported by the Fundamental Research Funds for the Central Universities under grant 2014KJ032 (“Interdisciplinary Project” with no. 20153683), and “The Youth 1000 program” project under grant 1000231901. It is also partially sponsored by “Shanghai Pujiang Program” project under grant 15PJ1408400, the National College Students Innovation Project under grant 1000107094, as well as the project from Nuclear Power Engineering Co., Ltd under grant 20161686.