
Abstract
Target following plays an important role in oceanic detection and target capturing for autonomous underwater vehicles. Due to the model nonlinearity and external disturbance, the dynamic model of a portable autonomous underwater vehicle was usually established with parameter uncertainties. In this article, a petri-based recurrent type 2 fuzzy neural network has been built to approximate the unknown autonomous underwater vehicle dynamics. The type 2 fuzzy logic system has been applied to the network to improve the approximation accuracy for systematic nonlinearity, and the petri layer in the network can improve estimation speed and reduce energy consumption. A petri-based recurrent type 2 fuzzy neural network–based adaptive robust controller has been proposed for target tracking. In the offshore experiments, the proposed controller has not only realized stable position and pose control but also successfully followed mobile target on the surface. In the tank underwater experiments, the pipeline target has been successfully followed to further verify the controller performance.
Keywords
Introduction
Underwater vehicles, including autonomous underwater vehicles (AUVs) and remotely operated vehicles (ROVs), have been widely applied for scientific applications, 1 environmental surveillance, 2 target tracking 3 harbour protection and so on. The ROVs are usually tethered to enable surface manoeuvre to complete complex tasks 4 with the disadvantages of limited range and coupled disturbance with the tether. On the other hand, AUVs are usually torpedo shapely designed, with one or more main propeller, cross-shaped or X-shaped wings for the underactuated control, 5 such as HUGIN 1000, 6 Autosub 6000, 7 REMUS 6000 8 and so on. They usually carry out long-range survey operations with hierarchical architecture of artificial intelligence 9 and high-resolution controllers. 10
In order to make the AUV a highly refined machine for oceanic cruising and operation, considerable researches have been performed to address precise attitude and trajectory control. 11,12 On the face of input nonlinearities and unknown disturbances, sliding mode controller is well known for its robustness. Cui et al. proposed an adaptive dynamic anti-wind-up sliding mode attitude controller on the basis of a simplified second-order dynamics; the controller has employed a nonlinear disturbance observer and an auxiliary dynamic compensator for the dead-zone nonlinearity and rudder saturation. 13 Joe et al. have developed a second-order sliding mode controller in order to compensate for the uncertainties in the hydrodynamic and unpredictable disturbance effects due to ocean currents. 14
However, conventional sliding mode controllers usually suffer from chattering phenomenon. 15 On the basis of system dynamics, adaptive concept can be utilized to minimize the chattering effect. Dong et al. have presented a state feedback-based back stepping control algorithm in the presence of constant and ocean current disturbance. With the expression of the relationship between desired heading angle and direction angle of the ocean current, the controller has further been enriched through an additional integral action in order to enhance the steady-state performance. 16 Xu et al. have proposed a novel adaptive dynamical sliding mode control-based methodology to enhance the robustness in the presence of environmental disturbances; it utilized a virtual velocity variable to represent the attitude error so as to avoid the representation singularities and simplify the analytical expression of the controller. 17 In order to reduce the chattering effect in the trajectory control of underwater vehicle, Soylu et al. proposed an adaptive concept to replace the switching term in conventional sliding mode control. 18
Fuzzy and neural network scheme can be used to estimate the unknown dynamic uncertainties and parameter uncertainties. 19 In order to minimize chattering effect and improve control resolution against unknown disturbance through exercise rules, Bessa et al. proposed an adaptive fuzzy sliding mode controller with a boundary layer to deal with the parameter uncertainties, external disturbance and chattering effect. 20 Zhang et al. introduced adaptive switching law with T–S fuzzy observer to estimate the AUV states and reduce trajectory tracking error. Furthermore, fuzzy strategy and neural network can be used to estimate uncertainty items online to reduce system chattering. 21 Zhang et al. have issued an adaptive sliding control method, switch gain adjustment method has been employed to deal with chattering problem, and network has been employed to estimate unknown items online. 22 But the feedforward network requires a great number of neurons to represent dynamical responses; moreover, the approximation function of neuron is difficult to interpret. Recently, petri network has been successfully applied for system modelling and analysis. On the vehicle nonlinear characteristics, Huang et al. proposed a petri-based recurrent neural network to improve the vehicle robustness. 23 Wai et al. utilized a petri recurrent fuzzy neural network to reduce the computation burden of model learning and to enhance the dynamic mapping ability. 24 In comparison with type 1 fuzzy logic system, type 2 fuzzy logic system can handle rule uncertainties with antecedent or consequent membership functions, although it is also characterized by IF–THEN rules, its antecedent or consequent sets are type 2. 25 This article will apply type 2 fuzzy logic in the petri network recurrent system in order to deal with unknown and nonlinear dynamics of AUV system and propose an adaptive robust controller to compensate approximation errors and uncertainties.
The rest of this study is organized as follows. The motion of a portable AUV will be modelled in the section ‘Motion modelling for a portable AUV’. An adaptive robust petri-based recurrent type 2 fuzzy neural network (PRT2FNN) controller will be proposed in the section ‘PRT2FNN-based adaptive robust control approach’. Target following experiments will be discussed and analysed in the section ‘Experimental results’. We will make conclusion in the section ‘Conclusions’.
Motion modelling for a portable AUV
The designed torpedo-shaped portable intelligent detection AUV is illustrated in Figure 1 with length at 4.4 m, greatest gyrator diameter at 0.53 m, greatest submergence depth at 1000 m, greatest cruising speed at 5 kn and continuation journey at 200 km. The AUV has been divided into three sections, for example, fore, mid and stern. It realizes cruising, diving and yawing through a propeller, horizontal wings and vertical rudders. The control software architecture is shown in Figure 2. Its navigation and position reckoning can be realized through Doppler velocity meter (DVL) and inertial navigation system. Exploring and oceanic surveillance will be realized through bathymetric side scan sonar and Charged Coupled Device (CCD). The software is written in the C++ language with motion control and intelligent decision two subsystems. Each subsystem module works independently with distributed task progress and unified communication protocol. Information transmission between two subsystems in the cabin is client–server.

Portable AUV construction. 1: Propeller, 2: communication sonar, 3: Global Positioning System (GPS), 4: wireless antenna, 5: strobe light, 6: rings for the crane, 7: vertical rudder, 8: horizontal wing, 9: DVL and inertial navigation system, 10: bathymetric side scan sonar and 11: CCD. AUV: autonomous underwater vehicle; DVL: Doppler velocity meter.

Control software architecture.
In the following, we establish the earth-fixed coordinate (

AUV coordinate system. AUV: autonomous underwater vehicle.

If the roll of AUV can be ignored, then the AUV motion equation in the vertical plane and in the horizontal plane can be expressed as

and
where
In general, the dynamics of an AUV can be expressed as

where
The thrust force for the AUV propeller can be obtained as

where ρ is the water density, D is the diameter of propeller, KTd is the thrust coefficient, n is the propeller shaft speed and J0 is the speed-related coefficient. If we set ua as ambient water velocity, then we have
Since the AUV is underactuated, motions of vertical and yawing are realized through the horizontal wings and vertical rudders. When the wings move at the speed V and effective attack angle α, they are subjected to the lift L vertical to the flow direction and the resistance D against the flow 27

where δe is the effective angle of the fin, CLα is the lift coefficient, CDα is the resistance coefficient, AR is the projection area of the fin profile and CLα is the function of α. If we set CL as the lift coefficient, according to the Hoerner and Whicker empirical formula, CLα and CDα can be improved as
where λ is the effective span and chord ratio

where Swing is the effective area, b is the span of wing length, Au is the auxiliary value and Cd0 is the resistance coefficient of the fin shape. If we set βse as effective attack angle of the fin at zero plane, then the relationship between the effective angle fin’s δe and the fin’s angle δs referenced to the vehicle hull and is (see Figure 4.)


Effective wing angle of attack.
If

Then we have

If we set TE as time constant and KE as control gains, then we obtain the model as

PRT2FNN-based adaptive robust control approach
PRT2FNN model estimation structure
Although AUV can be controlled through model equation (3) of the section ‘Motion modelling for a portable AUV’, there are still some uncertain parameters and external disturbances to be determined. Since the type 2 fuzzy logic system is superior for the prediction and handling of system uncertainties with type 2 membership functions, a PRT2FNN has been designed to approximate and handle unpredicted system disturbance, model uncertainties. The structure is the five-layer block diagram, which incorporates type 2 fuzzy logic features of the petri neural network system. The propagation details in each layer are issued as follows 1. Layer one is the input layer: In this layer, the inputs

where ni is the number of input signals. 2. Layer two is the membership layer: The input of this layer can be expressed as

where

where

and
3. Layer three is the petri layer: The purpose of PRT2FNN is to produce threshold through the competition laws to select the suitable nodes
where 4. Layer four is the rule layer: The output

where 5. Layer five is the output layer:

where ωk is the value of output action strength of the kth rule.
Adaptive robust control algorithm
The adaptive robust PRT2FNN control algorithm has been defined as (see Figure 5)

where

where


Adaptive sliding mode PRT2FNN controller architecture. PRT2FNN: petri-based recurrent type 2 fuzzy neural network.
The model approximation error

In the following, the linearization technique is applied to transform the membership functions into partially linear form from the Taylor expansion series of
where




From equations (18) and (3), one has

The transform equation can be obtained through equations (21) and (22)

where

where

where bu and δ are positive constants.
Controller stability analysis
In order to prove the proposed controller stability, the Lyapunov bounded function candidate has been defined as

Substitute equations (22) and (23) into equation (27), one obtains

In order to realize the controller convergence, the learning update law of the network is proposed as
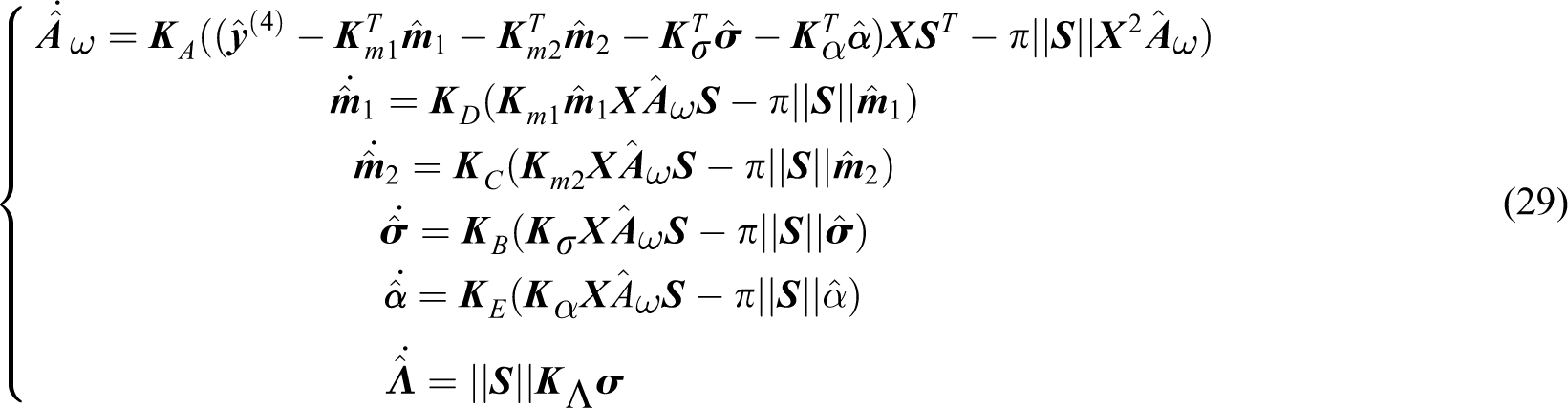
where
Thus equation (28) can be rewritten as follows

By using equation (24) and set
one obtains

Thus, we have from the robust function (25)

Therefore
Experimental results
In order to verify and analyse the proposed PRT2FNN-based adaptive robust control approach, experiments have been made based on the portable AUV of Figure 1. The following experiments of Figures 6 to 9 have been made in the Penglai offshore in Chinese Shandong province. The external environmental disturbances were obtained in Figure 6. The proposed PRT2FNN-based adaptive robust control approach of equation (18) consists of a PRT2FNN network approximator, linear and robust term, where the controller parameters are set as:

External disturbance obtained from DVL. DVL: Doppler velocity meter.

Controller comparisons in the offshore experiments. (a) Comparisons of heading control. (b) Comparisons of depth control.

Straight-line following in the offshore experiments. (a) Straight-line following trajectory. (b) Following errors. (c) Target following speed.

Circle following in the offshore experiments. (a) Circle following trajectory. (b) Following errors. (c) Target following angle.
From Figure 7, the proposed PRT2FNN-based adaptive robust control approach has realized a smooth and better performance in depth and heading control with less chattering and better convergence accuracy. The control responses of proposed controller are much better than the proportional integral and derivative controller and petri-based recurrent type 1 fuzzy neural network (PRT1FNN) controller 23 with fast settling time and smaller output deviations. In Figures 8 and 9, the AUV of section ‘Motion modelling for a portable AUV’ is planned to follow another bigger AUV along straight-line and circle, respectively. In straight-line following of Figure 8, the distance between the two AUVs was about 68.1 m at first and 8.1 m at the last. The following AUV continued closing the target AUV with designed controller. From Figure 8(c), the following process was becoming stable. From the circle line following the experiments of Figure 9, the distance between the two AUVs was about 65.1 m at first and 11.3 m at the last. The following AUV continued closing the target AUV with designed controller. From Figure 9(c), the following process was becoming stable. Therefore through wireless communication, the AUV has realized precise and convergence mobile target following with proposed control scheme.
Since the visibility distance is very limited in the submarine of Shandong Province offshore, the pipeline tracking experiments have been made in a 50 × 30 × 10 m3 tank of Harbin Engineering University (see Figure 10(a)). The pipeline was laid in the bottom of tank for inspection. The wave generator can generate oblique regular and irregular waves through Alternating Current (AC) servo motors, with the direction from wave generator to wave beach. The pipeline inspection experiment was made in disturbance environment (with current speed at 0.1 m/s from wave generator to wave beach in the tank). AUV was cruising with the depth control at 7 m. During the pipeline tracking experiments, the offset distance and the angle of pipeline tracking were obtained through the comparison between the midline of pipe contour and the AUV trace (see Figure 10(b)). After image filtering, segmentation, morphological processing and edge detection, the pipeline contour was extracted (see Figure 10(c)). The AUV made motion plan and obtained the route point according to the extracted pipeline contour in the embedded computer of autonomous plan. The designed PRT2FNN controller has been applied to realize the pipeline tracking experiments. Figure 10(d) illustrates the pipeline tracking path and reported pipeline positions by AUV in the disturbance environment. Figure 10(e) shows the tracking errors and the position measurement errors relative to the actual pipeline positions. The inspection results in illustrated precise tracking and recognizing results in disturbance environment.

Pipeline inspection results. (a) The wave and local current generation device. (b) Pipeline inspection principle. (c) Pipeline contour extraction. (d) Horizontal slices measurement path. (e) Measurement results.
Conclusions
A portable AUV can realize high-accuracy submarine topography detection and target following through high-accuracy motion control and sensors. In the consideration with propulsion and control system, the dynamic model of a portable AUV has been established with parameter uncertainties. A PRT2FNN has been built to approximate the unknown dynamics of the portable AUV. In order to improve the approximation accuracy for the systematic nonlinearity, the type 2 fuzzy logic system has been applied to the network; and further the petri layer in the network has been applied to improve the estimation speed and reduce energy consumption. A PRT2FNN-based adaptive robust controller has been proposed for target tracking. In the offshore experiments, the proposed controller has not only realized stable position and pose control but also successfully followed mobile AUV target on the surface. In the tank underwater experiments, the pipeline target has been successfully followed to further verify the controller performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This project is supported by National Science Foundation of China (nos 5129050, 51579053, 61633009), Major National Science and Technology Project (no. 2015ZX01041101), the Promotion Funds for the National Significant Requirements of Central Universities (HEUCFP201603) and also funded by the Key Basic Research Project of “Shanghai Science and Technology Innovation Plan” (no. 15JC1403300). All these supports are highly appreciated.