
Abstract
This article investigates a tube model predictive control scheme ensuring robustness and constraints fulfillment for hypersonic vehicles with bounded external disturbances. The polytopic linear parameter varying model is established using tensor-product modeling method, and tube-model predictive control controller is designed to satisfy all vertices of the polytopic linear parameter varying model. Firstly, the nominal model predictive control law is constructed for the nominal system without disturbances. Secondly, tube invariant set strategy is introduced for the unknown bounded disturbances, and the local robust feedback control law is presented to restrain disturbances. The proposed tube-model predictive control method not only steers the nominal state to track a reference trajectory but also keeps the real states within a tube centered with the nominal trajectory. Simulation results show the effectiveness of the proposed method for the hypersonic vehicle with bounded disturbances.
Keywords
Introduction
Hypersonic vehicles have attracted more and more interests due to special application value in both military and civilian areas, such as horizontal landing space vehicle, hypersonic missile, hypersonic aircraft, and trans-aerosphere vehicle. 1 Since hypersonic vehicles use scramjet, 2 they have high speed and can carry more payload than other ordinary flight vehicles. In recent years, hypersonic vehicles have been studied extensively in the world. Moreover, the United States has attempted some experimental vehicles, such as NASA’s X-43A 3 and Air Force’s X-51. 4 Although the hypersonic vehicle is a promising technology in aeronautic and aerospace engineering, it is still a challenge to design a good controller due to its high nonlinearity and strong coupling and the existences of external disturbances. 5
Hypersonic vehicles have a large flight envelop, where aerodynamic characteristics and flight dynamics will change dramatically during flight. Especially in rapid flight, parameters are very sensitive to the change of flight condition, and any change would possibly lead to a vehicle unstable. Therefore, there are a higher requirement for flight control system. That is, controller must be adapted to the larger parameter variation range and has strong robustness. 6 For example, Xu et al. 7 proposed indirect and direct global neural controllers combining dynamic surface design for hypersonic vehicle with unknown dynamics. As we know, linear parameter varying (LPV) model can fully describe the time-varying and inherent nonlinear characteristics, where the advanced linear control theory can be used instead of complex nonlinear approaches, 8 for example, linear matrix inequalities (LMIs). Fortunately, the hypersonic vehicle system can be represented as an LPV model. Qin et al. 9 used polytopic LPV model to design a robust variable gain controller for hypersonic vehicles. In the study by Wang et al., 10 a variable gain state feedback H ∞ controller with LPV model is proposed for the hypersonic vehicle.
In complex flight environment, in addition to parameter uncertainty, there always exist external disturbances, for example, wind, noise, and electromagnetic disturbance. 11 Thereby, it is very important and realistic for hypersonic vehicles to design a controller with strong anti-disturbance ability. Thus, robust or adaptive control becomes the main strategy for the hypersonic vehicle. In the study by Hu et al., 12 robust adaptive sliding mode controller is designed for the hypersonic vehicle with parameter uncertainty and external disturbances, where a robust sliding mode surface is predesigned and then the adaptive sliding mode controller based on the error model is designed. In addition, the disturbance observer is often used to handle disturbances. For example, Xu 13 presented dynamic surface control for longitudinal dynamics of aircraft and designed a disturbance observer to compensate model parameter uncertainty and external disturbances. Guan et al. 14 proposed a fuzzy predictive control method based on disturbance observer. The disturbance observer is constructed to estimate the size of unknown disturbances, and the adaptive fuzzy system is used to approximate disturbances. However, the disturbance observer often assumes the derivative of disturbances being zero or approximating to zero, which does not meet the actual flight.
It is known that model predictive control (MPC) is an attractive control strategy for handling complex systems with diverse constraints and multiple variables effectively. 15,16 Originally, the nominal MPC can solve the open-loop optimal control problems rapidly enough; however, the robustness of MPC becomes more and more important for existence of uncertainty and disturbances. Consequently, robust MPC receives much attention. Generally, robust MPC with constraints is transformed into the LMI problem, 17 and the many robust MPC control methods are proposed. For example, the robust MPC with bounded rates of parameter changes and robust MPC with saturated actuator are studied by Li and Xi 18 and He et al. 19 Ding et al. 20 and Ding 21 designed output feedback robust MPC controllers. In flight control, robust MPC has also got development. Qin et al. 22 designed a robust MPC controller for hypersonic vehicles using polytopic LPV model. A robust MPC tracking control strategy is presented for hypersonic vehicles with input constraints by Hu et al. 23 Although the open-loop min-max MPC is the feasible strategy for uncertainty and disturbances, 24 the control input may be too conservative and the good control performance cannot be ensured. So the feedback or closed-loop MPC becomes an attractive alternative. 25 However, the computation burden is often intolerable. Hence, Mayne et al. proposed the tube-MPC, 26 an effective technique for practical implementation of robust MPC. It can make the state of uncertain system to keep in a tube by designing a sequence of parameterized control strategy. This control action consists of a nominal MPC control law and a robust state feedback control law. Wherein the MPC control law steers the state of nominal system to track a reference trajectory, the state feedback control law maintains the actual trajectory within a tube centered along the nominal trajectory. Tube-MPC can not only deal with disturbances effectively but also improve the control performance. Meanwhile, online computation burden is reduced and the controller can be implement easily in practice. Cannon et al. 27 utilized successive linear approximations to develop MPC laws for nonlinear system, where tubes are used to bound the approximation errors. In addition, the tube is also used to design stochastic MPC controller. 28 Wang et al. 29 designed a tube-MPC method for constrained unmanned surface vessels based on trajectory linearization being used to translate the continuous nonlinear model to a linear time varying predictive model. In the study by Mayne et al., 30 tube-MPC controller is proposed to realize robust control of nonlinear system with additive disturbances using an ancillary MPC controller to replace the local linear controller. Sun et al. 31 proposed a method that consists of a nonlinear feedback control and a dual-mode MPC, where the nonlinear feedback control guarantees the actual trajectory being contained in a tube, and the dual-mode MPC is designed to ensure asymptotic convergence of the nominal trajectory to zero. We can see that for complicated hypersonic vehicle system, tube-MPC has the great potential to deal with disturbances and it can obtain the good control performance and stability. In the studies by Su et al.32 and Mayne et al., 33 tube-MPC based on state observer is considered for the case of existence of unmeasured states.
Thereby in this article, the tube-MPC strategy 32,33 is introduced, and the controller based on polytopic LPV model is designed for hypersonic vehicles with bounded external disturbances. Firstly, the original nonlinear longitudinal model is linearized by Jacobian linearization, and LPV model is formulated with altitude and velocity as the scheduling parameters. Secondly, the polytopic LPV model is established using tensor-product modeling method. Then, the offline tube-MPC controller is designed based on the disturbance invariant set. The center of the tube is generated by nominal MPC optimization with tighter input constraints. The local robust feedback control is employed to weaken the effect of disturbances, that is, to restrict the size of the tube. Finally, simulations comparing with the traditional MPC show that tube-MPC is more effective, and it has lower computation complexity and strong practicability.
The rest of this article is organized as follow. In “Vehicle model” section 2, the nonlinear model of hypersonic vehicle is presented. The polytopic LPV modeling is given in “Polytopic LPV model” section. A tube-MPC controller is designed in “Design of the tube-MPC controller” section. In “Simulations” section, simulations are given. Finally, we conclude this article in the last section.
Notation: Given two subsets
Vehicle model
In this article, the longitudinal model of hypersonic vehicle is developed by Bolender and Doman 34 and Parker et al. 35 of the air force research laboratory (AFRL), called AFRL model. The basic geometry of the hypersonic vehicle longitudinal model is given in Figure 1. 35
Figure 1 shows a longitudinal sketch of the hypersonic vehicle, in which

Geometry of the hypersonic vehicle model.

where h, V, α, θ, and q denote the altitude, velocity, angle of attack, pitch angle, and pitch rate, respectively. g is the acceleration due to gravity. I is the moment of inertia. L, D, T, and M are the lift, drag, thrust, and pitching moment, respectively.
The expressions of L, D, T, and M are modeled as
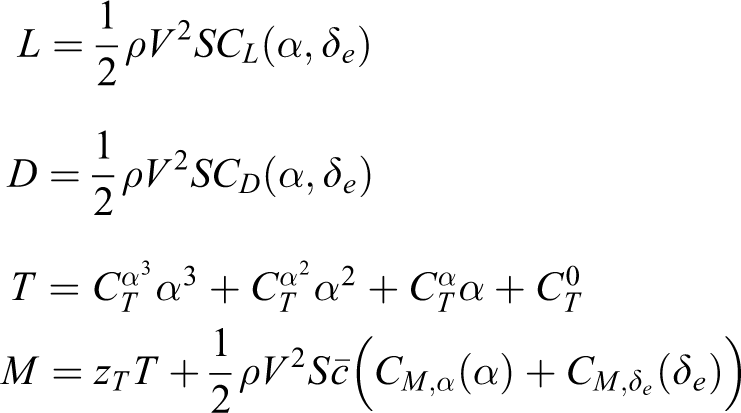
where S is reference area of the vehicle and ρ is the air density. The lift, drag, moment, and thrust coefficients are given as follows

where
The engine dynamics can be seen as a second-order system

where
Polytopic LPV model
In this section, the polytopic LPV model of hypersonic vehicle is constructed by the Jacobian linearization and tensor-product modeling method. Firstly, Jacobian linearization is used to develop the LPV model. The scheduling variables are altitude and velocity, that is,

By solving equations

Then, AFTR model is linearized by Jacobian linearization at different equilibrium points in the flight envelope Γ. Corresponding to these equilibrium points, the LPV model of the hypersonic vehicle is described as

where


Then, the continuous LPV models (2) and (3) are transformed into polytopic formation using tensor-product approach.
36
Moreover, the high-order singular value decomposition method
37
is used to simplify the complicated tensor. In the flight envelope Γ, choosing a certain number of sampling points, the continuous LPV model is discretized, and the tensor is established to store this discrete system. Next, we extract the linear time invariant (LTI) vertex system by high-order singular value decomposition and construct the weight function of the LTI vertex system. In this article, sampling density is 21 × 21, and four big singular values are remained for h and five big singular values for V by high-order singular value decomposition. Therefore, the polytopic convex system with 20 vertices is constructed. Consequently, time-varying matrix
Generally, the hypersonic vehicle is affected by external disturbances, such as strong wind in aerospace, which degrades the performance of control system. Therefore, the following discrete polytopic LPV model with external disturbances is formulated

where
The system (4) is subject to the input constraints

where
Design of the tube-MPC controller
In this part, a tube-MPC control approach is presented for polytopic LPV model (4) of the hypersonic vehicle. Firstly, the nominal polytopic LPV system (without disturbances) is defined as

where
The purpose of the proposed algorithm is to keep the state of polytopic LPV system with disturbances (4) within a tube, which centered with the nominal trajectory. Meanwhile, the control input constraint (5) is satisfied. That is
Define the following error equation by subtracting equation (6) from equation (4)

where

The overall tube-MPC control scheme design is shown in Figure 2.

Tube-MPC control scheme. MPC: model predictive control.
As shown in Figure 2, tube-MPC controller can be regarded as a feedback MPC with two degrees of freedom. Wherein, the nominal MPC controller is employed in an outer loop to provide a suitable central path, and the controller is only based on the knowledge of the nominal system without disturbances. The local robust feedback controller is separately designed in an inner loop to attenuate the effect of disturbances. The control input for the hypersonic vehicle with bounded disturbances is obtained as the sum of two components, that is,
Due to

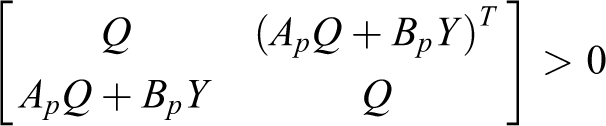
If the auxiliary feedback gain K, such that
Theorem 1
Consider the polytopic LPV error system (9), if there exist matrices Y and

Then, feedback controller
Proof
It is known that error system (9) is linear,

It is clear that if there are a positive-definite function

Let

Multiplying equation (13) from the left and right by Q, respectively, then there is

Applying Schur complement 8 to equation (14), then there is
Next, we should bound
Definition 1 (RPI set)
The set
Definition 2 (mRPI set)
The RPI set S is the mRPI set of the system (4), if and only if S is contained in every closed RPI set of the system (4).
We can calculate the mRPI set by the approach in the study by Raković et al.
39
and Tahir.
40
The mRPI set in the study by Raković et al.
39
is given by
Here, we present a lemma about the disturbance invariant set:
Lemma 1
Assume that Z is a disturbance invariant set of system (9), equation (4) is the real system with bounded disturbances, and equation (6) is the corresponding nominal system.
42
If
As can be seen from lemma 1, the control law
A significant requirement for the tube-MPC controller is to get a suitable nominal trajectory. Thereby, we employ the algorithm in the study by Kothare et al.
17
and make some changes. The nominal control law is parameterized as
Consider the following optimization problem 1 for the nominal system (6).
Optimization problem 1

where
Assumption 1
Considering the input constraint U and disturbance invariant set Z, we assume that
In the robust control, such an assumption is not uncommon. Because if disturbance set W is too large, the actuator constraints are unlikely to meet. Meanwhile, the corresponding disturbance invariant set Z gets bigger, and the control performance of system will be difficult to guarantee. Subsequently, optimization problem 1 is transformed into the following LMI formulation. Given a feasible initial state
Optimization problem 2

where
Since the nominal control law
In the following, we formulate a tube-MPC algorithm for the hypersonic vehicle and then present the main results of this article.
Algorithm (tube-MPC)
Step 1. The polytopic LPV model of the hypersonic vehicle is established using Jacobian linearization and tensor-product modeling method.
Step 2. Calculate the local feedback gain K using theorem 1.
Step 3. Compute the mRPI set corresponding to the feedback gain K, that is, the disturbance invariant set Z of the hypersonic vehicle.
Step 4. Get a suitable nominal trajectory. Compute the nominal control law
Step 5. Apply the input
Simulations
In this part, the simulations are presented to verify the effectiveness of the proposed method. Here, the bounded external disturbances
Case 1
In this case, the multistep maneuver commands for climbing and accelerating are selected with the same step changes
First, by solving LMI (10), we obtain the feedback control gain K as follows

The mRPI set corresponding to the feedback gain K is computed using the method in the study by Raković et al. 39 and as the disturbance invariant set Z of the hypersonic vehicle
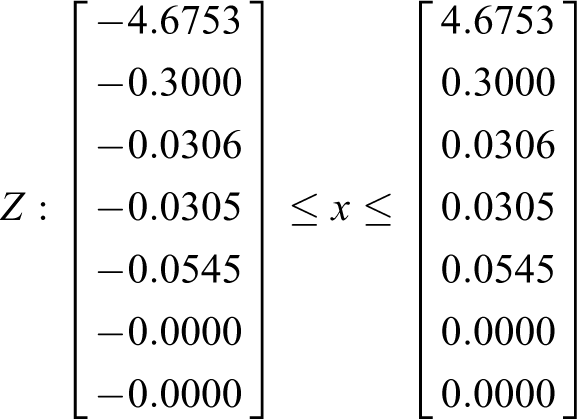
For case 1, the tube about the altitude and velocity is written as

A tube
The feedback gain matrix

The altitude and velocity tracking results together with the control inputs are presented in Figures 4 to 7. Other state variables of the hypersonic vehicle are shown in Figures 8 to 10.

Altitude tracking performance.

Velocity tracking performance.

Values of fuel-to-air ratio.

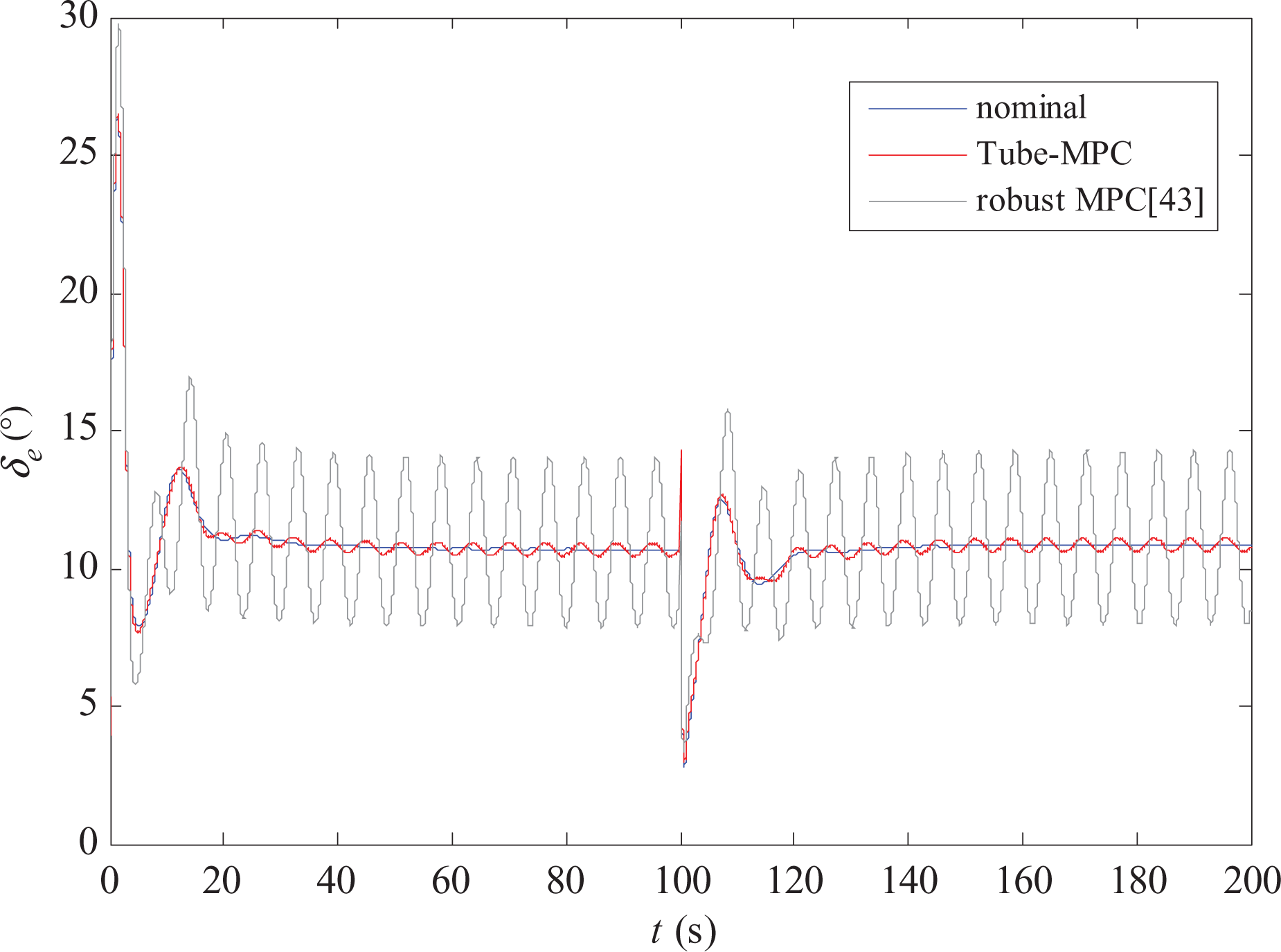
Elevator deflection.

Attack angle.

Pitch angle.

Pitch rate.
Figures 4 and 5 show the reference trajectory, nominal trajectory, and two trajectories obtained by different control strategies. The black line is the reference trajectory. The red line is the trajectory obtained by the tube-MPC controller in this article. The gray dotted line is the trajectory obtained by the robust MPC controller in the study by Bumroongsri.
43
And the blue line is the nominal trajectory without disturbances, that is, the center of the tube. We can see from these figures, the tube-MPC scheme achieves stable tracking of altitude and velocity. Figures 6 and 7 show the control inputs
Case 2
In this case, the reference value of altitude h is chosen as 85650 ft and switches to 85000 ft at 100 s. And the velocity V is chosen as 7800 ft/s and switches to 7500 ft/s at 100 s. Firstly, same as the case 1, we calculate the local robust feedback gain K that restricts the effect of disturbances, the feedback gain F that ensures the stability of nominal system, and the disturbance invariant set Z corresponding to the feedback gain K. Because the size of disturbances does not change, the values of K and Z are same as the case 1. Here, the new feedback gain

The trajectory of altitude and velocity of the error system (9) is given below.
Figure 11 shows the tube

A tube
Altitude and velocity tracking results and the control input curves are given in Figures 12 to 15. Other state variables of the hypersonic vehicle are shown in Figures 16 to 18.

Altitude tracking performance.

Velocity tracking performance.

Values of fuel-to-air ratio.
Elevator deflection.

Attack angle.

Pitch angle.

Pitch rate.
Figures 12 and 13 show the reference trajectory, nominal trajectory, and two trajectories obtained by different control strategies. From these results, we can see that the tube-MPC scheme achieves stable tracking of altitude and velocity. As a result of the existence of bounded disturbances, the state variables of the hypersonic vehicle cannot be stable to a certain point but into a bounded set, that is, the tube
Conclusion
We have presented a tube-MPC strategy for hypersonic vehicles with bounded external disturbances. Firstly, the polytypic LPV model of the hypersonic vehicle is built in a given flight range using tensor-product transformation. The nominal trajectory is determined using traditional MPC with the tighter input constraints. The auxiliary robust feedback controller steers the actual state with disturbances toward the nominal trajectory. The proposed method has same computation burdens as the nominal MPC despite the uncertainty. Moreover, the robust stability and input constraints can be satisfied. The tube-MPC controller developed in this article assumes that the states of hypersonic vehicles are available for measurement. However, during the actual flight, the attack angle and pitch angle are very small, so that it is difficult to get exact measurements. Therefore, the control approach can be extended to the hypersonic vehicle subject to unmeasured states in the future work.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China under grant (61673294) and Research Foundation of Tianjin Key Laboratory of Process Measurement and Control (TKLPMC-201613).