
Abstract
This article addresses a new intelligent full-body balancing control framework on a full-sized humanoid robot for stably tracking a given reference while grasping onto objects with unknown weight information. Dealing with external uncertainty from the inherent stability of humanoid is an interesting challenge for developing stable manipulation performance during their operation. To this end, intelligent fuzzy-proportional–integral control scheme where parameters are adaptively adjusted to respond to those uncertainties is proposed in this study. Application of momentum information at the torso as additional information is to make the improvement of the manipulation capability on a humanoid over an unknown weight object. Results from both experiment and simulation over a range of unknown weight objects on humanoid hand verified that the proposed scheme is more representative of the intelligent control on humanoid operation with external uncertainties.
Introduction
Since humanoid research began in the late 20th century, an important driving force behind it was the idea that robots could seamlessly be a part of our lives, conducting human-like tasks. To enhance the performance of these tasks, research to improve the kinematic redundancy of a robotic arm has been prevalent. 1 –6 Especially to maximize the reachable workspace and versatile motion, improvement on dexterity of a robotic arm has been considered as one of the more important topics. 7 –9 However, as the degree of freedom (DOF) increases, controlling the arms becomes extremely complex. Factors such as efficient power distribution to the motors and increased weight of the motors are added to the already difficult problem of fully accomplishing their performance. 10
Specifically in an intelligent control on a humanoid robot, little work has been investigated regarding redundant arms taking into account a full-body balance while conducting manipulation tasks. Implementation of a linear proportional–integral–derivative (PID) control has remained insufficient to fully compensate for uncertainties which implies on robotic system. 5,7,11 Additionally, the stability of high-order systems is often constrained to that specific task with the system parameters being extremely sensitive. Therefore, the intelligent control acting on the humanoid full-body balancing while manipulation with unknown weight objects should be more investigated for their stable performance.
As a representative intelligent control, fuzzy-PID scheme has shown good performance when it applied to account for a wide range of operating conditions. It is an implementing fuzzy logic to the traditional PID controllers to actively adjust the control gains as while the task is being conducted. 3 –5 In a tracking control of a general robotic manipulator, gain parameters on adaptive fuzzy control scheme are in general tuned by consideration of a user-defined rules which have each tracking error and error’s derivative of an end effector as control inputs.
The goal of this article is to apply a fuzzy-PID control scheme on a 7-DOF humanoid arm with no weight information following a predefined trajectory while considering the full-body balance. “Kinematics” section explains the kinematics of a redundant humanoid arm at the velocity level. “Fuzzy-PI approach” section outlines the structure of fuzzy-PID control framework. “Proposed scheme” section describes the proposed approach to implementing this framework to a humanoid. “Evaluation and results” section summarizes the results from simulations and experiments that were designed to prove the validity of this approach. The last section concludes this article.
Kinematics
Kinematics of a humanoid arm in general refers to the coordinate of the end effector from torso’s coordinate (base frame) as shown in Figure 1. The forward kinematics map of a serial mechanism can be expressed as 12

where qi and ξi are the operational angle and twist coordinates of the ith joint (i = 1, ⋯, n), respectively.

Rendering image of THOR-RD. THOR-RD: tactical hazardous operations robot-rapid deployment.
The initial map of the forward kinematics can be addressed as

where

where ωi is a unit vector indicating in the direction of the ith joint. In this application, the instantaneous spatial velocity of the end effector is given as 12

where
Inverse solution of a redundant arm gives a nonunique solution of the joint variables given an end effector posture. 2,12 This application utilizes a gradient-based optimization to determine a solution as follows

where J† is the Moore–Penrose generalized inverse of J and ∇ Φ is

In this study, the joint limit avoidance method as an additional cost function is considered. 2 qi, max and qi, min were appropriately set to avoid self-collision of two consecutive joints.

where qi, max, qi, min, and qi, mid are the maximum limit, minimum limit, and middle value of qi with x-norm calculation, respectively.
Fuzzy-PI approach
In spite of the increasingly more complex humanoid, tradition PID tracking control scheme on full-body balancing has continued to be used almost inclusively. Linear PID model on humanoid balance control doesn’t allow to be capable of properly responding to external uncertainties and demands continous tuning of the gain parameters over a variety of operational condition. 14 In addition, constant parameters are not feasible for trajectories of extended length, and when the end effector actually conducts a meaningful task of grabbing an object, the imprecise information of the weight of the object can be detrimental to the stability of the system. 6
Fuzzy logic control is one of the most frequently used control methodologies in many research to deal with a vague value. 15 Specifically the self-tuned fuzzy-PID scheme is to make easy to cover a wider range of operating conditions than conventional controllers with fixed gain parameters. Because of this, this study focuses on implementing an adaptive PI control scheme (in Figure 2) on humanoid balancing with uncertainty while manipulation task. This approach relies on user-defined rules to actively update the PI gains depending on the state of the robot during its manipulation task. It allows different dimensional data, x-axis’s error and z-axis’s error of end effector, and momentum change at torso, to be combined into the resulting output. r(t), u(t), and y(t) are the reference input, the plant input, and the system output, respectively.

Block diagram of the proposed fuzzy-PI. PI: proportional–integral.
The core components of fuzzy logic are as follows: fuzzification, inference engine, and defuzzification. 15 Fuzzification is a function of converting crisp values into fuzzy sets via user-defined membership functions. Inference engine is based on set theory where it finds a conclusion based on the rules of inference in an IF-THEN form. Defuzzification is a function of deriving a crisp value from inferred fuzzy values such as a control signal. 16
A linear PI controller can be mathematically described as follows 3

where KP and KI are the proportional and the integral gains, respectively. t and e(t) are the instantaneous time and the reference error, respectively. Inference rule of the proposed fuzzy-PI control law (two inputs: e1(t) and e2(t) and single output: u(t)) can be designed as follows

where

In addition, inference rule in this framework (

where Cf,j indicates the fuzzy sets of each gain.
For an implication of an entire possibility distribution in finding its meaningful point, the center of area and trigonometric membership function are considered to generate the resulting crisp value (control output). Resulting proportional gain, K* P , and integral gain, K* I , can be addressed as 3


where zf,j is a coefficient of Rf,j which is a conjunction of Af and Bj. Finally, the resulting control output at each iteration can be expressed as

Proposed scheme
High-DOF humanoid can be easily affected by external disturbance while conducting a manipulation task. 7,17 During these arm motions, an angular momentum at torso is created, which causes instability of the full body along with an inaccurate tracking error. In addition, an angular momentum at torso with uncertainty causes the stability worse. However, this error has been paid little attention because manipulation on a stance is considered to have little effect on the angular momentum of the torso. There is also little way of partly taking into account the rotational motion of the upper body during manipulation. 7
To note, this work only focuses on the position control of the end effector excluding angular values (roll, pitch, and yaw) at the current state. In addition, an angular momentum at the torso is regarded to have greater influence on the end effector error than linear momentum during their manipulation tasks because most of all humanoid robots are allowed to manipulate tasks on a stance. To this end, fuzzy logic is implemented to actively generate adaptive PI gains to regulate the arm motion, corresponding to the changes of the torso’s angular momentum. Two considerable inputs are the position error of the end effector on either the X-axiz or the Z-axiz, ex(t) and ez(t), respectively, and the change of the torso’s angular momentum with respect to the Y-axis from the previous iteration, δhy(t)



The motivation behind including the change of the angular momentum about the Y-axis is because of the choice of the end effector’s trajectory. For verification of the proposed scheme, grabbing a power tool and executing tasks in the positive side of the frontal plane is tested. This would primarily cause a large change of the upper body’s angular momentum about the Y-axis, compared to each angular momentum about X- and Z-axes, respectively. It means that the moment arm from the base frame to the end effector is the greatest along the pitch axis. Therefore, in the proposed control platform, fuzzy logic uses a two input and one output mapping (Table 1) and the trigonometric membership functions (Figures 3 and 4) designed from heuristic knowledge. The five fuzzy sets are negative large, negative small, zero, positive small, and positive large.
Fuzzy rule matrix.

NL: negative large; NS: negative small; Z: zero; PS: positive small; PL: positive large.
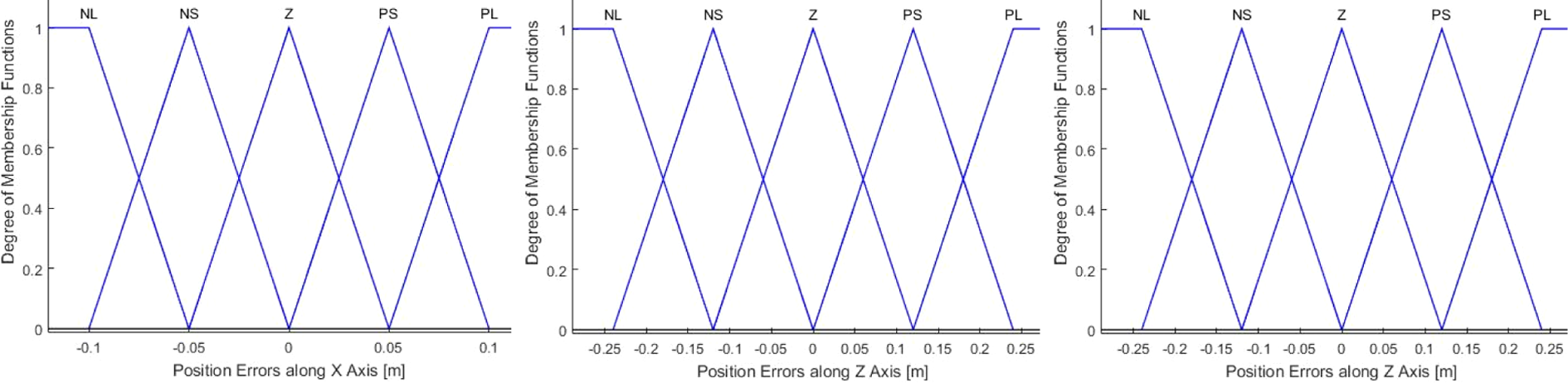
Membership function on each position error.

Membership function on both proportional and integral gain.
Evaluation and results
This section displays the effectiveness of the proposed scheme for controlling an adult-sized humanoid robot with 7-DOF arm in both simulation (Figure 5) and experiment (Figure 6). Robotic arm weighs approximately 8 kg without any tool attached to the end effector. A simulation model of THOR-RD was replicated in Cyberbotics’ Webots 8.0.3 to test the control strategy. The exact same scheme was also implemented in the actual robot. A trajectory of the end effector representative of a robot guiding a power tool to the positive frontal plane to execute a task was roughly designed as shown in Figure 7.
18
Initial PI gain parameters to follow the reference trajectory were roughly tuned such that the actual trajectory would mostly resemble that of the reference. The resulting values,
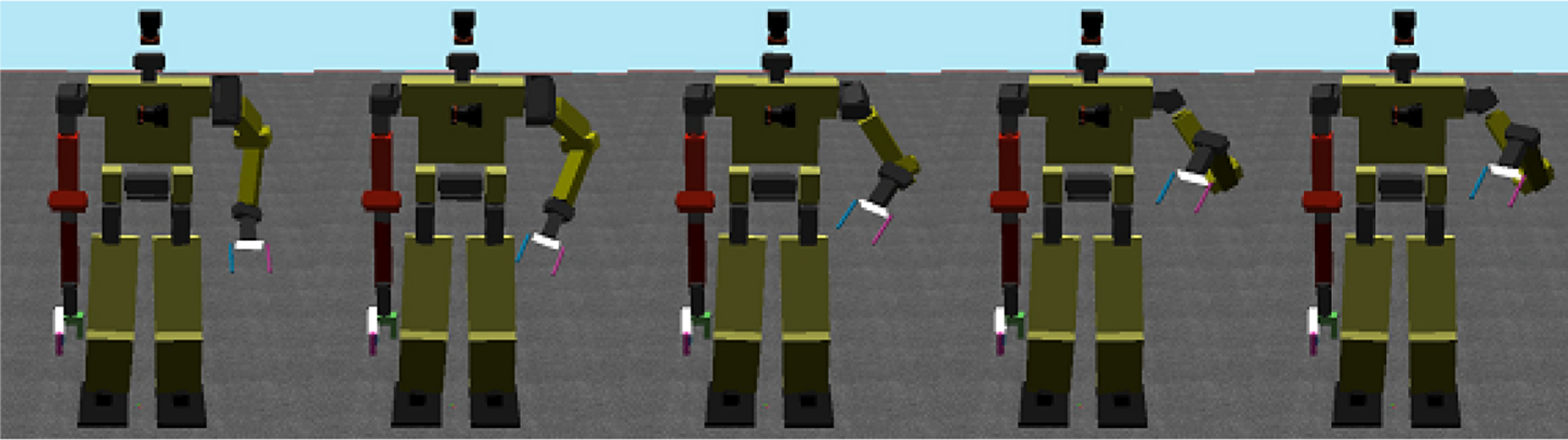
Simulation of the proposed scheme.

Experiment of the proposed scheme.

(a) Trajectory in 3-D. (b) Trajectory in X-axis view. (c) Trajectory in Z-axis view.
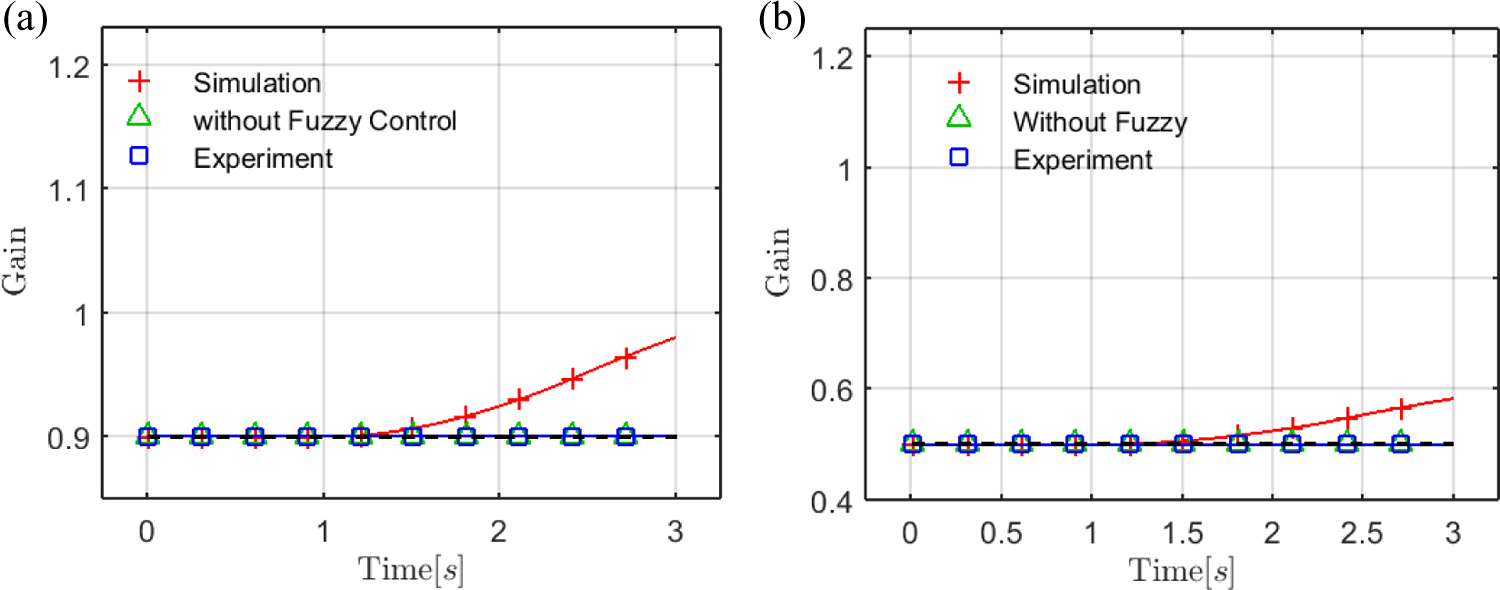
No mass situation was initially simulated and experimented. This was to test the effectiveness of fuzzy-PI relative to the conventional PI control, free from additional uncertainties that extra mass can introduce. It was to also serve as a standard value to how much additional mass can affect the final error of the end effector’s position. Figure 8 shows that after approximately 1.5 s into the trajectory, a significant change in the slope of the actual trajectory occurs. This is because the center of mass begins to significantly shift its position in the positive direction of the X-axis as the robot arm stretches forward and 1/6 of the robot’s mass is moved away from the initial idle position. With the introduction of this disturbance, fuzzy-PI’s performance relative to the conventional PID control scheme can be easily observed. In both the X and Z trajectories, not only does the simulation data show better performance than the conventional PI data, even the experimental data shows a slight improvement in performance over its simulated conventional counterpart. The primary reason behind this performance increase is that the control loop takes into account not only just the error of the end effector but also the constantly changing offset in the torso. This uncertainty is created from the center of mass moving away from the body, which effectively makes a humanoid lean toward the direction of the arm’s motion. The gyro on the humanoid detects this change in the pitch axis and the fuzzy control scheme takes this into account and adjusts the PI control parameters accordingly to overshoot, actually decreasing the positional error when seen from a global coordinate frame. Observing the effect of fuzzy-PI with variable weight on the end effector gives an even clearer view on the positive impact fuzzy has in this application. Variable weights of 1.0 (Figure 9), 1.5 (Figure 10), and 2.0 kg (Figure 11) were held by the robot’s end effector and identical trajectories were commanded.

(a) X-trajectory and (b) Z-trajectory output with no mass.

(a) X-trajectory and (b) Z-trajectory output with 1.0-kg mass.

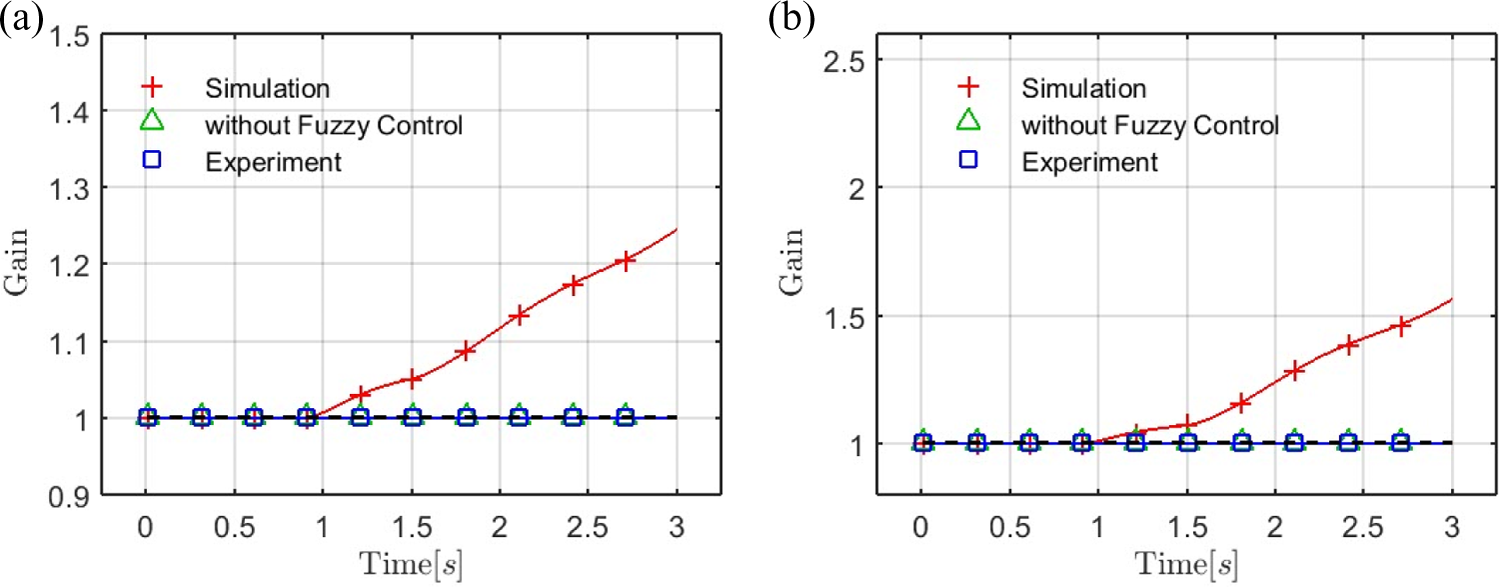
(a) X-trajectory and (b) Z-trajectory output with 1.5-kg mass.

(a) X-trajectory and (b) Z-trajectory output with 2.0-kg mass.
As seen in the trajectory figures and seen through the average errors (in Figure 12), the proposed control scheme’s errors are relatively smaller compared to those of the conventional PID scheme. With the increase in weight, the sensitive PID parameters initially tuned for the condition with no additional mass applied to the end effector are insufficient in decreasing the error. However, the fuzzy-PI controllers show a capability to continue to reduce the positional errors caused by the change in the humanoid’s balance. This shows its flexibility and robustness to imprecise inertial parameters by partly compensating for errors in different dimensions.

(a) X and (b) Z average error at different weights.
The curvature of the changing PI gains also shows the proposed control scheme correctly responding to the end effector’s position error caused by the offset in the torso. With the increase in weight, a humanoid’s posture will be affected even more during manipulation. A consequence is that the error in the end effector’s trajectory will also increase. As seen especially in Figure 13 to 20, the proposed approach accounts for this error and drastically increases the gain parameters to reduce the positional error. This results show that average errors roughly stay the same value despite the variable weights, but more importantly, always outperform the conventional PID controller.
(a)

(a)

(a)

(a)

(a)
(a)

(a)

(a)
Accordingly, the fuzzy-PI control scheme demonstrates its flexibility in accounting for the different tools a humanoid might use during its task. It effectively minimizes the positional error without having to manually tune the PID gain parameters for every different set of tools.
Conclusion
As recent humanoid is more complicate, the system uncertainties are apt to easily accelerate it to be unstable. To get this resolved, an intelligent full-body balancing control framework while grasping onto objects with unknown weight information was developed in this study. Proposed control methodology was adopted to compensate for uncertainties on a humanoid’s manipulation capability through active adjustment of the gain parameters depending on the current state of a full-body robot. The results from the simulation and experiment are promising in that the proposed control scheme could noticeably reduce the positional errors of an end effector relative to a typical PI controller. In future, testing this proposed approach in even more diverse trajectories should be considered.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.