
Abstract
In this article, an adaptive neural tracking controller is designed for near-space vehicles with stochastic disturbances and unknown parametric uncertainties. Based on the great nonlinear function approximation capability of neural networks, the unknown system uncertainties are tackled using the radial basis function neural networks. Furthermore, on the basis of stochastic Lyapunov stability theory, an adaptive tracking control scheme is developed for near-space vehicle which can guarantee the closed-loop system stability. Under the developed adaptive neural control scheme, all closed-loop system signals are bounded in the sense of probability, and the tracking error converges to a small neighborhood of the origin. Finally, simulation results are provided to illustrate the proposed adaptive neural control scheme that can guarantee the satisfactory tracking performance for the attitude motion of the near-space vehicle with stochastic disturbances.
Introduction
Near-space vehicles (NSVs) are novel aerospace vehicles that have attracted more and more attention. With the advantages of traditional aircrafts and spacecrafts, such as high mobility and wide flight envelope, 1 –4 it has raised concerns on military and civilian application. As a kind of flight control systems, NSV has the complicated characteristics, such as strong nonlinearity, strong coupling, system uncertainties, special working environment, and multiple mission modes. The robust flight control of NSV becomes a challenging and valuable work, and some control approaches have been proposed in the literature. 5 –15 Meanwhile, the control design as one of the most important research topics in NSV, the tracking control problem has been extensively studied. The novel global neural dynamic surface tracking control scheme is presented for hypersonic flight vehicle in the study by Xu et al. 16 The guaranteed transient performance-based attitude control scheme was proposed for NSV with input saturation by Chen et al. 17 In the study by Chen et al., 18 a robust sliding mode control strategy was presented for attitude dynamics of NSV. In the study by Cheng et al., 19 an online support vector regression compensated nonlinear-generalized predictive control (NGPC) system was presented for hypersonic vehicles.
As is well known, the NSV is a multiple-input multiple-output (MIMO) nonlinear system subject to external deterministic disturbances which will further increase the design difficulty of the reliable and accurate flight control scheme. Over the past few decades, the disturbance observer–based control schemes have been well studied in the literature. 20 –30 To efficiently handle the unknown disturbance based on the dynamic information of disturbance, the adaptive dynamic surface control scheme based on disturbance observer was proposed for the NSV with input saturation by Chen and Yu. 31 In the study by Chen et al., 32 on the basis of terminal sliding mode technique and disturbance observer method, an anti-disturbance control scheme was developed for the hypersonic flight vehicles with input saturation. In the study by Cheng et al., 33 an NGPC strategy based on sliding mode disturbance observer (SMDO) was designed for the hypersonic NSV attitude control system. However, stochastic disturbances always exist in practical systems which need to be further considered. Especially, the flight attitude control of NSV will become more complicated if above mentioned aspects are simultaneously considered.
Recently, some significant results on backstepping-based control scheme 34 –41 for deterministic nonlinear systems have been generalized to stochastic nonlinear systems. For instance, by introducing a quartic Lyapunov function, a backstepping design scheme was proposed for a class of strict-feedback stochastic nonlinear systems by Deng et al. 42 Based on the great nonlinear function approximation capability of neural networks (NNs) or fuzzy logic systems, by combining adaptive fuzzy control or adaptive neural control with backstepping technique, many adaptive control schemes can be used to efficiently handle the uncertainties of stochastic nonlinear systems. Furthermore, some meaningful results were presented for stochastic nonlinear systems on the basis of the quartic Lyapunov function in the literature. 43 –55 It is well known that mechanical systems are often subjected to stochastic disturbances, which significantly affect the performance. By reasonably introducing random noise, a method to construct stochastic Lagrangian control systems was given and an adaptive tracking controller was designed by Cui et al. 56 Using geometric stochastic feedback control, a robust asymptotic stabilization of rigid body attitude dynamics with stochastic input torque was studied by Samiei et al. 57 In earlier study, 58 a new robust stochastic control methodology was developed for unmanned aerial vehicles. In a realistic environment, according to the characteristics of the NSV, stochastic components and random noises are included in the models which will lead to the considerable difficulty in the design stage of the flight control system for the NSV with stochastic disturbances.
Motivated by above analysis, in this article, using backstepping technology, an adaptive neural tracking control scheme will be developed for the NSV with stochastic disturbances, unknown parametric uncertainties, and external disturbances. This article is organized as follows: The stochastic nonlinear control system of NSV with stochastic disturbance and mathematical preliminaries is given in “Problem statements and preliminaries” section. The design and stability analysis of an adaptive neural tracking controller is proposed in “Adaptive neural tracking control design” section. In “Simulation study” section, simulation results are given to demonstrate the effectiveness of our developed robust attitude control approaches. Conclusions are addressed in the last section.
Throughout this article, ∥ ⋅ ∥ stands for the Euclidean norm (or Frobenius norm for a matrix); λmin(⋅) and λmax(⋅) denote the minimum and maximum eigenvalues of a matrix, respectively. Let E[⋅] and P{⋅} represent the expectation operator and the probability of a random variable, respectively.
Problem statements and preliminaries
Problem formulation and some assumptions
The uncertain attitude dynamics with external disturbance of the NSV can be described as the following MIMO nonlinear system 3 :

where
By considering the influence of the stochastic disturbance torque, as shown in the study by Zhu, 59 the attitude dynamics in the body frame is obtained as follows

where
According to Section 5.5 of the reference,
60
with
where W is a m-dimensional independent Wiener process.
To facilitate the controller design for attitude dynamics with stochastic disturbances, the system (3) needs to be transformed into the equivalent

where
where
The control object of this article is that the output of system (5) can track the desired bounded signal
Assumption 1
For the nonlinear attitude dynamics system (5) of NSV with stochastic disturbances, the gain matrices G1 and G2 are invertible.
3
In addition, there exist unknown positive constants
Assumption 2
For all t > 0, there exist the unknown positive constants ϖi such that
Assumption 3
For the time-varying unknown external disturbances di(t), there exist unknown positive constants
Assumption 4
There exist unknown positive constants
Mathematical preliminaries
Consider the following stochastic nonlinear system 61

where
Definition 1
For any given

where
Definition 2
The stochastic process

Definition 3
The stochastic process
61
x(t) of equation (6) is said to be semi-globally uniformly ultimately bounded (SGUUB) in pth moment, if for a given compact set
Lemma 1
Consider the stochastic nonlinear system (6).
42
If there exists a positive definite, radially unbounded, twice continuously differentiable Lyapunov function

then, (i) the system has an unique solution almost surely and (ii) the system is bounded in probability.
Lemma 2 (Young’s inequality)
For

where
Neural networks
The radial basis function NNs (RBFNNs) are used to approximate an unknown continuous function

where

where

where δ is the approximation error and satisfies |δ| ≤ δ* with δ* > 0. Φ* is the optimal weight vector and it is expressed in the following form

Adaptive neural tracking control design
In this section, the backstepping design is based on the following coordinate transformations

where z1 and z2 are called the error variables, and υ1 is the virtual control law which will be given later.
To begin with the backstepping design procedure, for i = 1, 2, denote
Step 1
Noting

As shown in “Neural networks” section, the unknown uncertainty ΔF1 will be approximated using the RBFNNs. Thus, there exists an NN approximation

where the approximation error vector δ1 satisfies
Substituting equation (17) into equation (16) yields

According to assumption 3, the compounded disturbance
The virtual control law υ1 is designed as

where
The adaptive laws are designed as follows


where
Consider the Lyapunov function candidate as

From equation (7), and combining with equations (19) to (21), we have
According to Lemma 2, we have





Substituting equations (24) to (28) into equation (23) yields

Step 2
According to

Similar to step 1, the RBFNNs will be utilized to tackle the unknown uncertainty ΔF2, and the optimal approximation can be written as

where the approximation error vector δ2 satisfies
Substituting equation (31) into equation (30) yields

where
The control law Mc is designed as follows

where
The parameter adaptive laws are designed as follows



where
Consider a stochastic Lyapunov function as

From equation (7), one has

According to Young’s inequality, one has






Substituting equations (39) to (45) into equation (38), we have
By combining with equation (29), it yields
where
Thus, from equation (47), and according to the stochastic Lyapunov stability theory, the signals of the closed-loop system are uniformly bounded in the sense of probability. It may directly show that the tracking error z1 is as small as possible by choosing suitable design parameters, and the estimate errors
Simulation study
In this section, simulation results are presented to illustrate the effectiveness of the proposed adaptive neural attitude control scheme for NSV with stochastic disturbances. The attitude dynamics of NSV with stochastic input torque is in the form of system (5).
Suppose that the aerodynamic coefficients and aerodynamic moment coefficients have +20% and −20% uncertainties. On the other hand, suppose that all the external disturbances are assumed to act on the fast-loop system in the form of the moment disturbances d2 which are given as

The stochastic input disturbance is in the form of the Gaussian white noise
Thus, we obtain

It is clear that the following inequalities hold


where
The initial values are chosen as H 0 = 21,000 m, V 0 = 4000 m/s, α 0 = 2°, β 0 = −1°, μ 0 = 3°, p = q = r = 0°/s. The desired flight attitudes Ω d are chosen as

The designed parameters and matrices of the controller are chosen as

Response curves of attitude angles under adaptive neural controller.

Response curves of tracking errors under adaptive neural controller.

Response curves of attitude angles rate under adaptive neural controller.
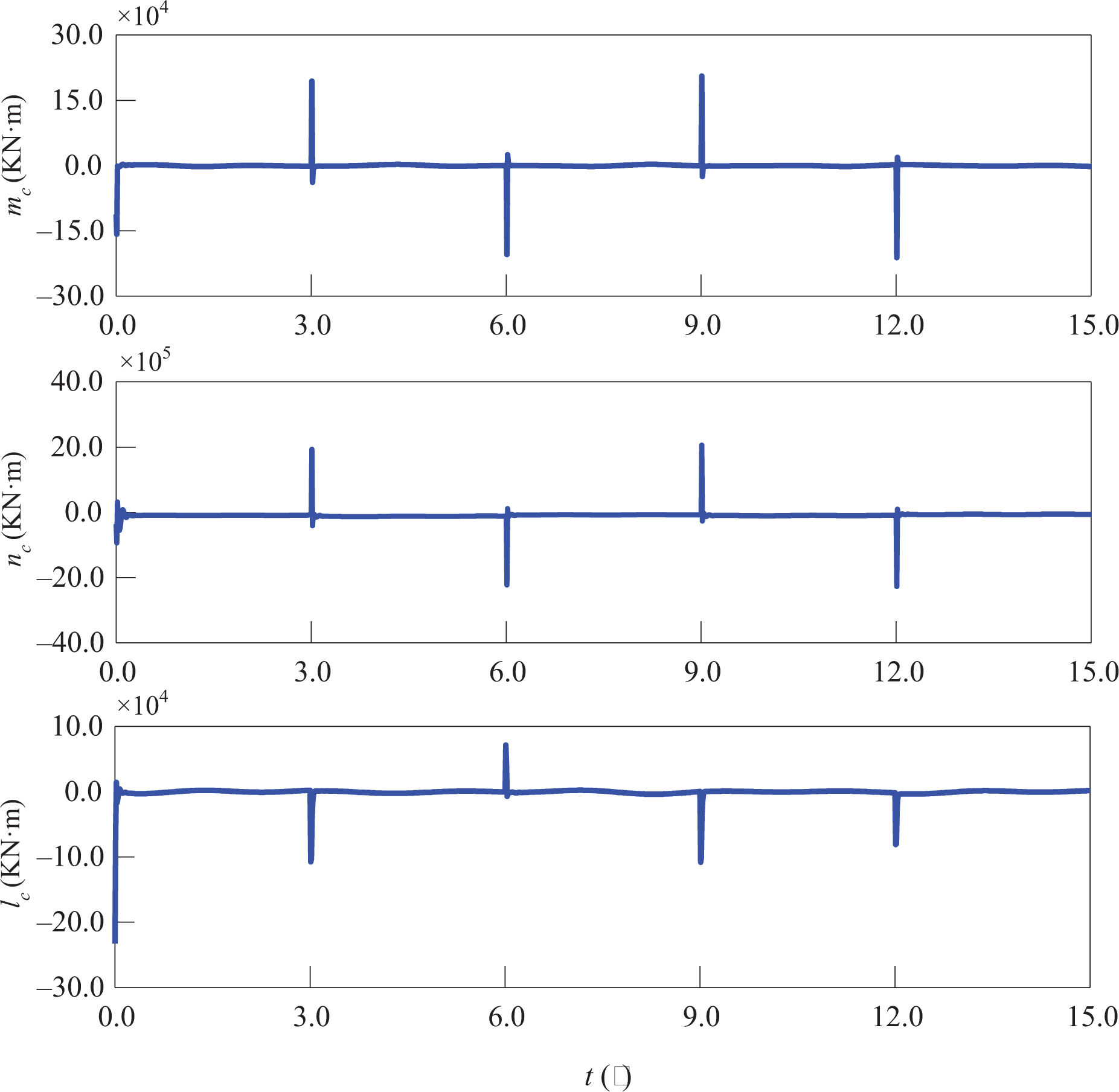
Actual control inputs under adaptive neural controller.
Conclusions
In this article, an adaptive neural controller has been proposed for the NSV with stochastic disturbances and unknown uncertainties. The packaged unknown uncertainties are tackled using the RBFNNs. Furthermore, an effective robust adaptive backstepping-based control scheme has been designed. On the basis of the stochastic Lyapunov stability theory, the stability of the closed-loop system is proved, and the tracking error can converge to a small neighborhood of the origin. Finally, the effectiveness of the proposed robust attitude control scheme was illustrated via the simulation results.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under grants 61573184 and 61374212, in part by the Fundamental Research Funds for the Central Universities under grant NE2016101, and in part by the Projects of Anhui Province University Outstanding Youth Talent Support Program under grant gxyq2017068.