
Abstract
Hypersonic cruise missile always adopts the configuration of waverider body with the restraint of scramjet. As a result, the lateral motion exhibits serious coupling, and the controller design of the lateral lateral system cannot be conducted separately for yaw channel and roll channel. A multiple input and multiple output optimal control method with integrators is presented to design the lateral combined control system for hypersonic cruise missile. A hypersonic cruise missile lateral model is linearized as a multiple input and multiple output plant, which is coupled by kinematics and fin deflection between yaw and roll. In lateral combined controller, the integrators are augmented, respectively, into the loop of roll angle and lateral overload to ensure that the commands are tracked with zero steady-state error. Through simulation, the proposed controller demonstrates good performance in tracking the command of roll angle and lateral overload.
Introduction
With the breakthrough of the scramjet and heat safeguard, the hypersonic vehicle has tended to develop into cruise missile to realize global strike. 1 –7 Many projects of hypersonic cruise missile (HCM) such as High-Speed Strike Weapon programs and Hypersonic Air-breathing Weapon Concept, which are being managed by the US Air Force Research Lab and Defense Advanced Research Programs Agency, have been carried out. 8
Over several past decades, a large number of researches have been focused on hypersonic aircraft aerodynamic modeling, 9–11 because hypersonic vehicle has a character of highly areo-propulsion integrated configuration. Consequently, it is difficult to measure and estimate the aerodynamic parameters and set an accurate model. Also, the scramjet is highly sensitive to the vehicle flying conditions such as angle of attack and sliding angle. Many works have been concentrated on designing high-precision control system to guarantee that the scramjet works efficiently. The uncertainties in the dynamic model, such as aerodynamic, thermodynamic, and elastic coupling, are considered as the primary disturbances. Matthew 12 reported an adaptive linear quadratic altitude and velocity tracking control algorithm for the longitudinal model of a generic air-breathing hypersonic flight vehicle. In case of input saturation, dead-zone input nonlinearity, states constraint, and actuator fault, the reader can refer to the studies of Xu et al. 13 –16 A nonlinear controller for an air-breathing hypersonic vehicle was designed by Fiorentini et al. 17 Xu et al. 18 presented an adaptive sliding mode control for hypersonic aircraft with nonlinear and model uncertainty. Considering the effect of a digital computer on board with a certain sampling interval, the control system for an HCM using discrete sliding model is proposed by Fan et al. 19 Xu et al. 20 –23 have studied the dynamic surface control with neural network to deal with the system uncertainty using minimal-learning-parameter technique and global tracking design.
The researchers are mainly focused on the longitudinal controller design for hypersonic vehicle, and only a very few are focused on the lateral controller. 24,25 The lateral controller design is more difficult than the longitudinal. As in many published papers, the height and velocity are usually controlled in longitudinal autopilot; nonetheless, they are also in the same channel. However, there is serious coupling between yaw and roll due to the surface symmetrical configuration. The lateral autopilot should control the yaw channel and roll channel simultaneously. Also, the desirable control performance cannot be got if the lateral system is designed separately as yaw and roll. In addition, the lateral model of hypersonic aircraft can be seldom studied in literatures, since the lateral model is more complicated.
In this article, a lateral control strategy for an HCM is proposed. Firstly, an HCM’s lateral model is established and the aerodynamic force and moment coefficients are given. Then, the HCM’s lateral model is linearized as a multiple input and multiple output (MIMO) plant by small perturbation linear method. Based on the MIMOs optimal control theory, the lateral combined control system is designed. To ensure that the commands are tracked with zero steady-state error, the integrators are augmented, respectively, into the loop of roll angle and lateral acceleration. It is proved by simulation results that the proposed controller demonstrates good performance in tracking the command of roll angle and lateral acceleration, even when the serious couple exists in the lateral model.
This article is organized as follows: The dynamics and discrete model of HCM is given in “The lateral aerodynamic model of HCM” section. The design of lateral combined controller is illustrated in “The optimal controller with integrator” section. Then, we conduct simulations and give the results to demonstrate the reasonability of our design. Finally, we make a conclusion in the last section.
The lateral aerodynamic model of HCM
HCM has waverider configuration with an under-fuselage scramjet inlet. The asymmetrical aerodynamic configuration is shown as Figure 1.

The aerodynamic configuration of HCM. HCM: hypersonic cruise missile.
HCM has four control surfaces: two outward canted vertical tails are used for yaw control and a pair of horizontal elevators is applied for pitch and roll control. The equations of lateral motion are

where Cz is the lateral force coefficient; Cmx and Cmy are the rolling moment coefficient and the yawing moment coefficient, respectively; ψv is the trajectory heading angle; γ is the flight-path angle; β is the sideslip angle; and ψ is the yaw angle.
The force and moment coefficients of lateral motion are as follows

where α is the angle of attack, β is the sideslip angle, δx is the aileron, and δy is the rudder.

where Lref denotes the reference length, and V is the flight speed.
By using the method of coefficient frozen, the lateral motion equations of HCM can be linearized

The dynamic coefficients in equation (4) are


The control coefficients in equation (4) are

In equation (2), the roll moment coefficients Cmx contain the yaw motion coupling parameters such as the sideslip angle β, rudder δ y , and the rotational angular rate of yaw ω y , which denotes the yaw motion, will affect the roll response. In equation (4), the coefficients b14, b12 and b17 indicate the coupling in roll which is caused by yaw channel. Conversely, b21 and b35 are the coupling caused by roll.
Rewriting the above equations into the form of state space, we have
where

The optimal controller with integrator
The design of control system can be transformed as the “standard” linear quadratic regulator (LQR) problem

Subject to the dynamics



We can get the optimal state feedback is

where P is the solution to the algebraic Riccati equation

The optimal state feedback can be transformed as output feedback with equation (9)

Clearly, the LQR problem has no integrator which will cause the steady error. Also, the control fin is proportion to the track error; as a result, the fin will move with a large rate. So we can penalize the control rate instead of the fin deflection. The cost function is

Let

The cost function can be written as

The state equation can be augment

Let

where
By integrating both side of equation (18), we can get

The aim of the lateral control system of HCM is to keep yaw channel stable by using overload feedback control and to achieve lateral maneuver through roll angle tracking control. That is to say, the purpose of the control system is to ensure roll angle
So we choose the cost function

where the positive definite matrix Q1 is error weighting matrix, and
To introduce the integrator, the δx and δy be augmented as new states, using the
where


D1 is zero, and therefore,
where

By introducing roll angle command γc and lateral overload command nzc into the state-space equation, we can get the state space model of command tracking that

where



Equations (20) and (23) are a standard LQR problem. So we have transformed the optimal tracking problem to a regular problem. By solving the Riccati equation (24), we have

where
We can obtain the optimal control law

In equation (25),
By transforming the state feedback to output feedback, the optimal control law is easily denoted as

where

By integrating both side of the equation (27), one can yield the optimal control commands
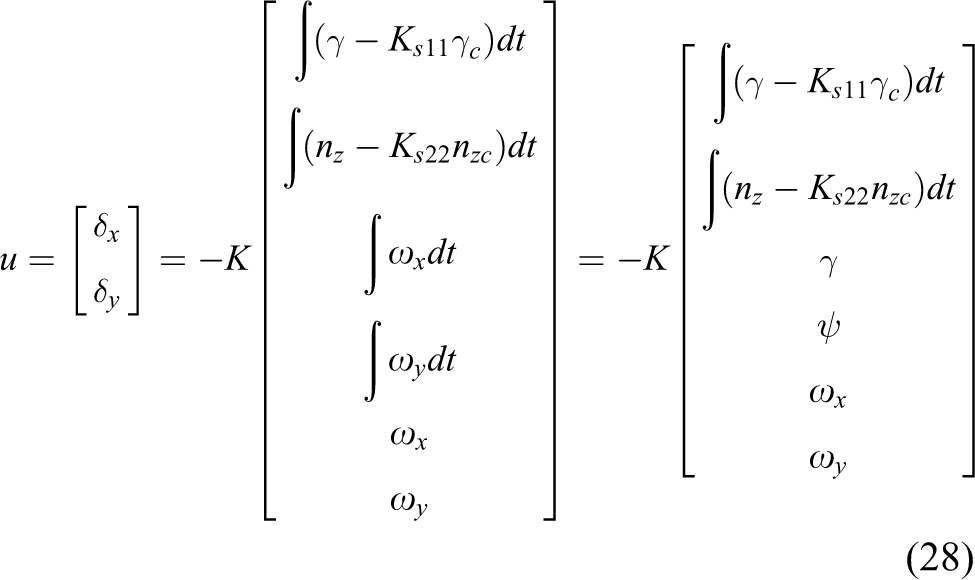
where
Consequently, the structure of lateral control system of HCM is shown in Figure 2.
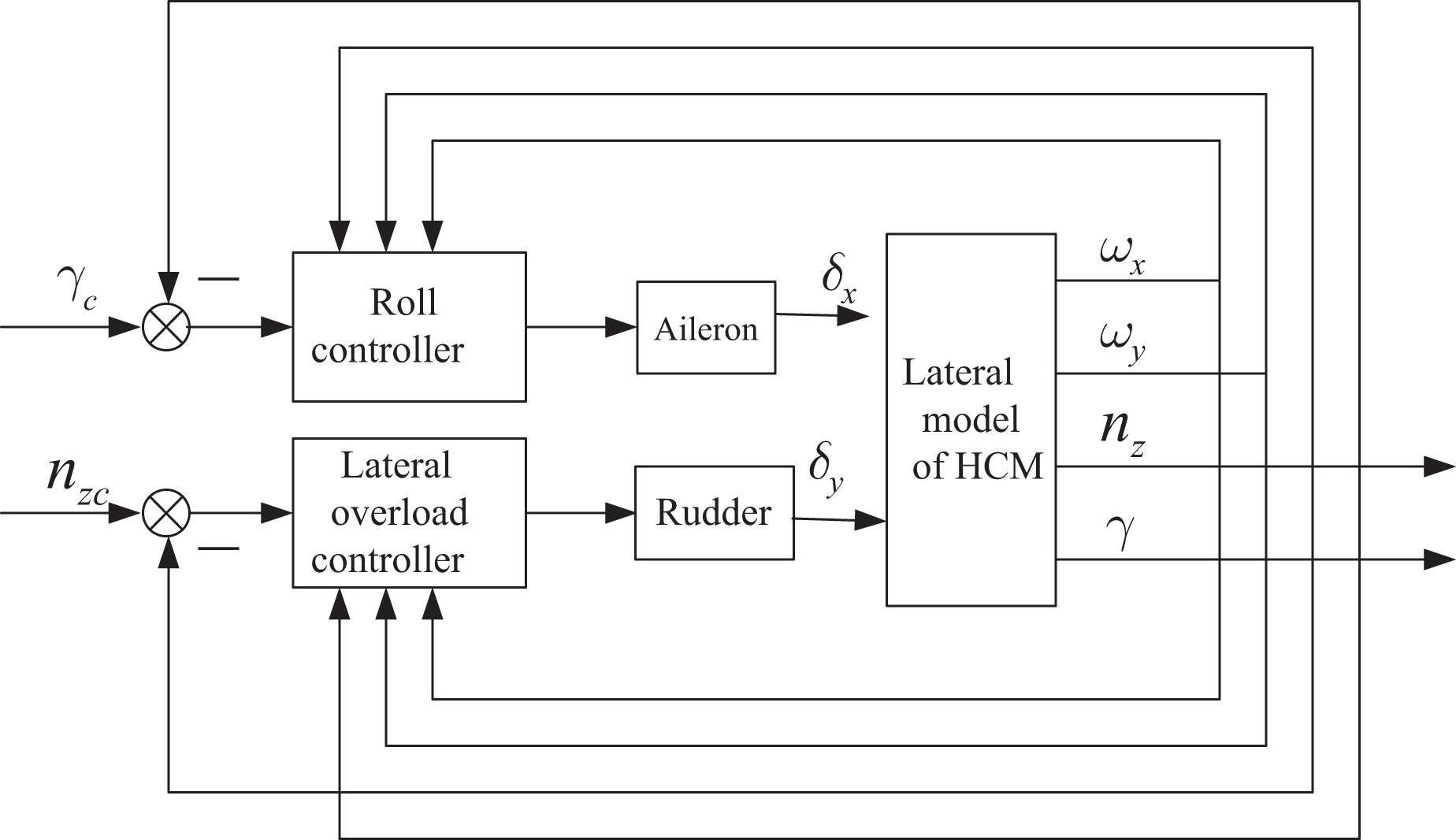
The structure of lateral control system of HCM. HCM: hypersonic cruise missile.
Simulation
Assuming the missile cruise at height


Chose weighted matrixes

According to equation (26), we can get the gain matrices K and Ks


To validate the robustness of controller, the uncertainties of the model are considered as

Results of lateral overload.

Results of sideslip angle.

Results of roll angle.

Results of roll rate.

Results of yaw rate.

Results of aileron.

Results of rudder.
Simulation results show that the lateral combined control system can track the roll angle command and lateral overload command with zero steady-state error. However, under this condition, it means that the lateral overload is obtained by the sideslip angle which is called STT. While tracking 1 g lateral overload command, the missile will introduce the sideslip about −2.4°. Although sideslip angle is not larger, it can also cause intense coupling in roll, as shown in Figures 5 and 6. The amplitude of roll is disturbed up to 9.7°, and the roll rate is up to 47°/s. Therefore, the lateral maneuver using STT cannot be applied for HCM; it should use the method of BTT, which achieves the lateral maneuver by controlling the roll to change the direction of lift which can be seen as follows.
2) BTT simulation. Let

Results of roll angle.

Results of lateral overload.

Results of sideslip angle.

Results of roll rate.

Results of yaw rate.

Results of aileron.

Results of rudder.
Under this condition, the lateral maneuver is called BTT; in this mode, the purpose of yaw with feedback of lateral overload nz is only to augment the stability, and therefore,
Conclusion
In this article, a lateral combined control system is designed by using MIMO optimal method for HCM with strong coupling in lateral model. In the controller, integrators are augmented to achieve no steady error. Simulation results demonstrate that the control system has good performance in tracking roll angle command and yaw overload command, even when the strong coupling exists in the model.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is supported by Fundamental Research Funds for the Central Universities under grant no. 3102015BJ008, Aeronautical Science Foundation of China under grant no. 2015ZA53003, Natural Science Basic Research Plan in Shaanxi Province (2014JQ8326, 2015JM6272, 2016KJXX-86), and Fundamental Research Funds of Shenzhen Science and Technology Project (JCYJ20160229172341417), and this work is also supported by the Special Science Research Foundation of Doctor Subject for Higher education under grant no. 20136102120012.