
Abstract
This article presents a new fractional-order sliding mode control (FOSMC) strategy based on a linear-quadratic regulator (LQR) for a class of uncertain nonlinear systems. First, input/output feedback linearization is used to linearize the nonlinear system and decouple tracking error dynamics. Second, LQR is designed to ensure that the tracking error dynamics converges to the equilibrium point as soon as possible. Based on LQR, a novel fractional-order sliding surface is introduced. Subsequently, the FOSMC is designed to reject system uncertainties and reduce the magnitude of control chattering. Then, the global stability of the closed-loop control system is analytically proved using Lyapunov stability theory. Finally, a typical single-input single-output system and a typical multi-input multi-output system are simulated to illustrate the effectiveness and advantages of the proposed control strategy. The results of the simulation indicate that the proposed control strategy exhibits excellent performance and robustness with system uncertainties. Compared to conventional integer-order sliding mode control, the high-frequency chattering of the control input is drastically depressed.
Introduction
The origins of fractional calculus can be traced to a note from Leibuiz to L’Hospital 300 years ago, in which the meaning of the derivative of order one half is discussed. 1 Actually, fractional calculus derives from extending the derivatives and integrals of integer-order to noninteger cases. In the past few decades, many scholars have pointed out that derivatives and integrals of fractional order are highly suitable for the description of various physical objects, such as continuum mechanics, porous media, thermodynamics, electrodynamics, quantum mechanics, among others. 2 Recently, designing fractional-order controllers has become one of the most exciting topics in control theory. This idea was first proposed by Oustaloup. 3 He introduced a robust fractional-order control scheme called Common Robust d’Order Non-Entire. 4 Podlubny introduced the most well-known fractional-order proportion-integral-derivative controller, which is named PI λ D μ. 5,6 Many additional fractional-order controllers have been proposed, including tilt-integral derivative (TID) controllers, 7 fractional-order lead–lag compensators, 8,9 fractional-order optimal controllers, 10,11 and fractional-order adaptive controllers. 12,13
Sliding mode control (SMC) is a well-known effective control technique that is widely applied for both linear and nonlinear systems. 14 This control is also considered as a feasible control approach for systems with uncertainties. Generally, any linear sliding surface can guarantee the asymptotic stability and desired performance of the closed-loop control systems. However, monotonous switching feedback control gain causes the settling time of the closed-loop control system to increase, meaning that the system state cannot reach the equilibrium point in a finite time. Moreover, SMC offers high-frequency chattering of control input, which leads to undesirable loads on control actuators.
In recent years, with the development of fractional controls, many scholars have employed fractional-order SMC (FOSMC) to overcome these drawbacks. In the study of Dadras and Momeni 15 , a novel type of control strategy called fractional-order terminal SMC (FO-TSMC) was introduced for a class of uncertain dynamical systems. Based on the Lyapunov stability theory, a fractional-order switching manifold was proposed to guarantee the sliding condition. The results of a simulation indicated that the proposed strategy ensured finite time stability for the closed-loop system. In the study of Mujumdar et al., 16 an FOSMC scheme was proposed for control of a single-link flexible manipulator. The switching surface was constructed based on the fractional derivatives in the differential equation. The proposed FOSMC not only achieved better performance with small control chattering, but also was robust in the face of external load disturbance and parameter variations. In the study of Tang et al., 17,18 the FOSMC was proposed for antilock braking systems (ABS) to regulate the slip to a desired value. These controllers not only deal with the uncertainties in ABS, but also track the desired slip faster than conventional integer-order SMC (IOSMC). Additionally, FOSMC has been employed for speed control of permanent magnet synchronous motors, 19,20 for vibration suppression of uncertain structures, 21 for control design of uncertain nonlinear systems, 22,23 for control of fractional-order chaotic systems, 24,25 and so on and achieved better control capacities.
To date, most of the research on FOSMC has focused on the fractional-order switching manifold, these FOSMC strategies improve the control capacities of conventional IOSMC by employing fractional-order switching manifold, but they cannot achieve optimal control performance without additional measures. In this article, an optimal FOSMC strategy is proposed for a class of uncertain nonlinear systems. The proposed control strategy is designed based on linear-quadratic optimal theory. Specially, a novel fractional-order sliding surface is introduced based on linear quadratic regulator (LQR). Therefore, the controller designed in this article is composed of two parts as nominal item and fractional item. The nominal item makes the system achieve convergence as quickly as possible and the fractional item rejects the system uncertainties to guarantee the necessary robustness. Finally, the stability of closed-loop system is proved by using Lyapunov stability theory.
The rest of this article is organized as follows. In section 2, some preliminaries and definitions of fractional calculus are introduced. In section 3, the uncertain nonlinear system and the tracking error dynamics are formulated. In section 4, the optimal FOSMC scheme based on LQR is constructed. Two academic examples are simulated in section 5. Finally, conclusions are included in section 6.
Basics definitions and preliminaries of fractional calculus
Definitions of fractional derivatives and integrals
Fractional calculus is a generalization of integration and differentiation to noninteger-order fundamental operator

There are three commonly used definitions for fractional derivatives involving Grünwald–Letnikov (GL), Riemann–Liouville (RL), and Caputo definitions. The GL definition is

where h is the time increment, [x] means the nearest integer no more than x, and

with Gamma function Γ(⋅). The RL definition is

The Caputo definition is given by

As mentioned above, under the homogenous initial conditions, the RL and the Caputo derivatives are equivalent.
Approximation of fractional derivative
Recall the approximate GL definition given below, where the step size of h is assumed to be very small
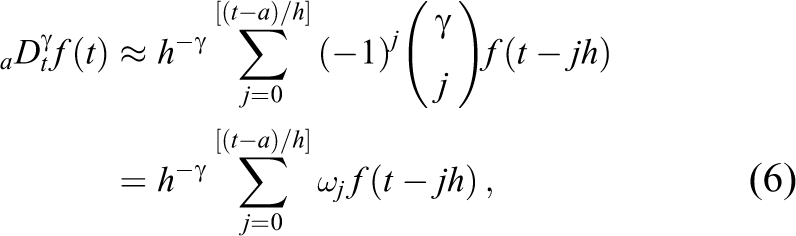
where the binomial coefficients can recursively be calculated with the following formula

This approximation method is very satisfied when

Then, only the term of
Problem statement
Consider an uncertain affine nonlinear system of the form

where
The control task is to track the reference command
After differentiating

or

where
Due to existences of the system uncertainty, equation (11) can be rewritten as the form

where
Furthermore, if
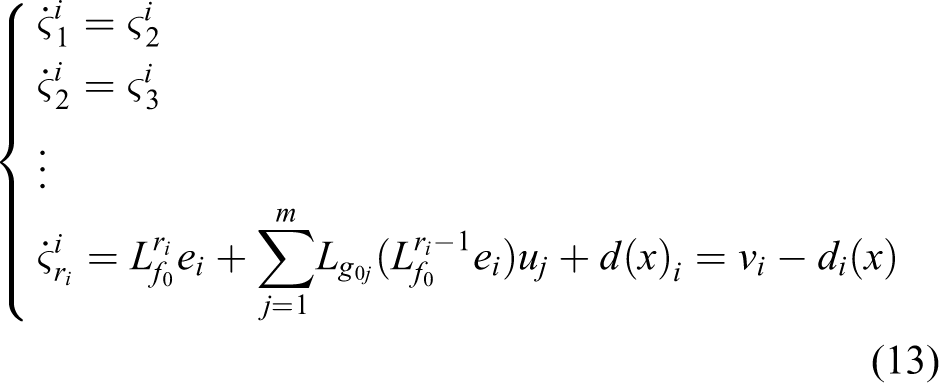
where
FOSMC based on LQR
For stabilizing system (13), when there are no uncertainties, LQR is designed to guarantee the finite time convergence of the tracking error dynamics. In classical linear control theories, LQR is an optimal controller derived from solving linear-quadratic optimization problems. It has shown excellent performance in the control synthesis of linear systems. However, if unmodeled dynamics and system uncertainties are taken into account, it will be difficult to guarantee the control objective with LQR alone. Thus, in this section, a novel optimal FOSMC strategy is designed based on LQR to counteract the inertial uncertainties. Compared to conventional IOSMC, the magnitude of control chattering is drastically depressed.
Therefore, to stabilize system (13) in finite time, the auxiliary control input

where the first item
Nominal control based on LQR (
)
Consider the particular case

where

The control objective is to drive the state of system (15) to

the control input

where P is the positive-definite solution to the Riccati equation with design parameters Q and a

Obviously, it can be easily verified that if
Fractional control (
)
As mentioned above, finite time convergence cannot be guaranteed when system uncertainties exist in system (13). Therefore, fractional control item is employed as one of the integrated control to achieve robustness. Then, the closed-loop system can reject system uncertainties, and the control input is chattering reduced.
Generally, conventional IOSMC employs the sliding surface that is linear, stable differential operator on the tracking error. 29 Thus, the conventional sliding surface gets the form as

where λ defines the bandwidth of the tracking error dynamics.
Based on the conventional sliding surface

Compared to conventional sliding surface
Then differentiating the fractional-order sliding surface in (20), we have

Combining (12) with (21), we obtain

where

where

Lyapunov stability analysis
Lyapunov stability analysis is a common approach to deal with the stability problem of linear/nonlinear systems. Thus, this part employs Lyapunov stability theory to prove the finite time convergence of the sliding motion and the global stability of the closed-loop control system as follows.
Theorem
Considering the tacking error dynamics of system (13), if it is controlled with the fractional sliding mode controlling law described by
Proof
Choosing the Lyapunov function as

Differentiating equation (25), we obtain

Substituting (23) into (26), we obtain

Therefore, on the basis of Lyapunov stability theorem, the state variables of the closed-loop control system will converge to the equilibrium point.
Before the sliding motion is stable,

Then, we obtain

The sliding motion happens within finite time, then we taking integral of both sides of (29) from 0 to

Set

Therefore, the tracking error trajectory of system (13) will converge to the sliding surface
Remark
As mentioned in Utkin,
30
non-smooth Lyapunov functions can be applied to check the finite time convergence of a system. Therefore, choosing the non-smooth Lyapunov function
Simulation examples
A kinematic model of a car
The control of a kinematic model of a car is illustrated in this part. It has been chosen to test the performances of sliding mode algorithms. 32 –34 The system is described by

where


Kinematic car model.
The relative degree of system (32) is easy to be calculated as 3



Then, we obtain

where
Let

where
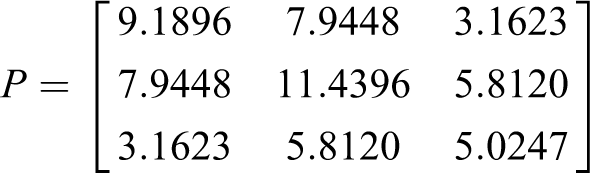
First, the continuous control part
Then, P is calculated as
Second, the fractional control part

The block diagram of the fractional-order control system is shown in Figure 2. For comparison, there are another three different controllers to be considered: a conventional IOSMC, a conventional IOSMC based on LQR (denoted as IOSMC-LQR), and a single FOSMC. These three controllers are formulated as following expressions

Block diagram of the fractional-order control system.
The IOSMC is

where integer-order sliding surface
The IOSMC-LQR is

And the single FOSMC is
In simulations, the design parameters of the three aforementioned controllers are given the values as (
Figure 3 displays a comparison of the system response between the single LQR and the proposed controller in this article (FOSMC-LQR). It can be clearly seen that single LQR results in an unsteady tracking trajectory, and the tracking error oscillates up and down around
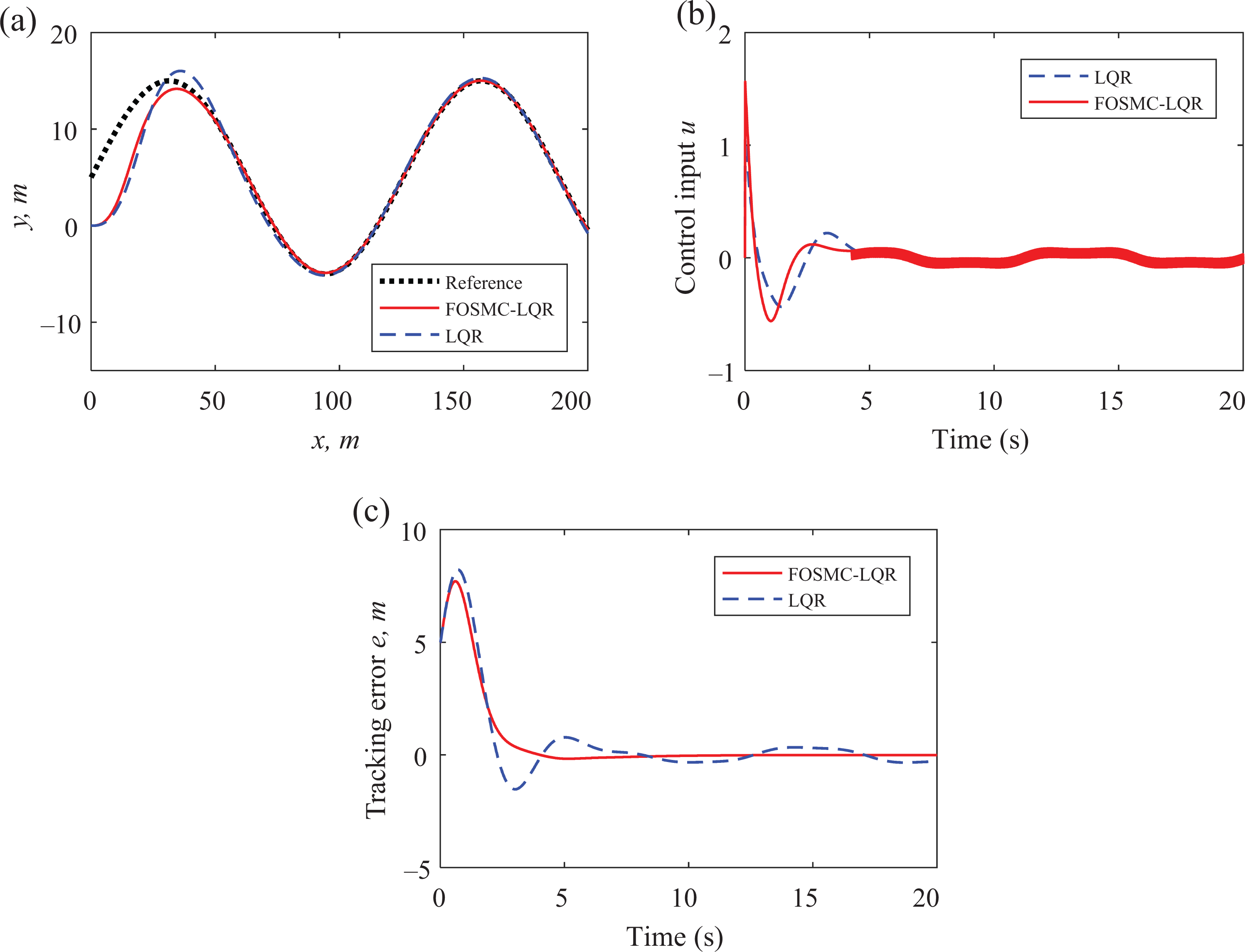
Comparison of system response between LQR and FOSMC-LQR. LQR: linear-quadratic regulator; FOSMC: fractional-order sliding mode control.
Figure 4 gives a system response comparison of the single FOSMC and the FOSMC-LQR. As shown in the figures, single FOSMC requires larger switching feedback control gain,
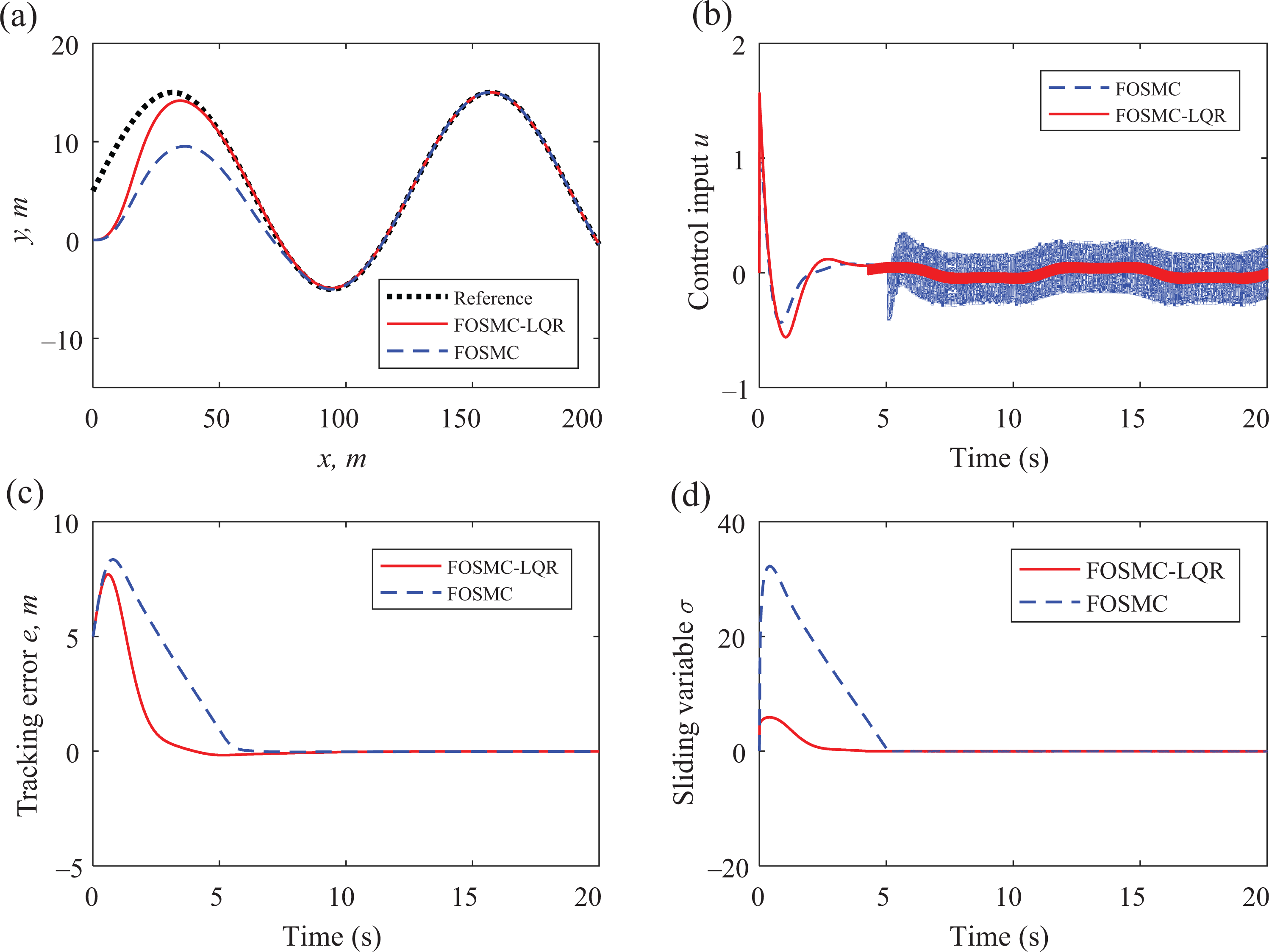
Comparison of system response between FOSMC and FOSMC-LQR. LQR: linear-quadratic regulator; FOSMC: fractional-order sliding mode control.
The integer-order and fractional-order derivatives of the tracking error are demonstrated in Figure 5, such as
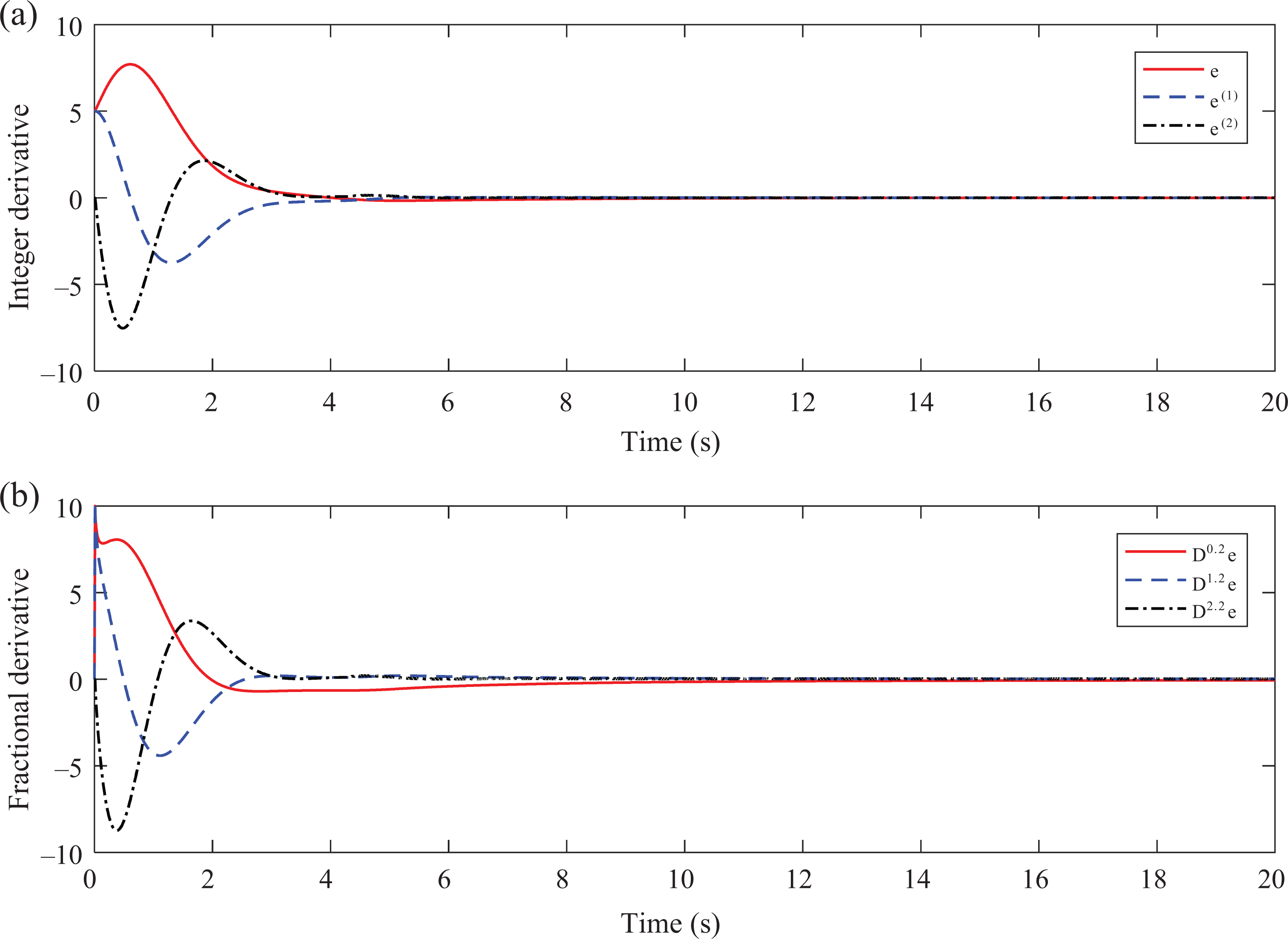
Integer- and fractional-order derivatives of the tracking error.

Comparison of system response between IOSMC and FOSMC. IOSMC: integer-order sliding mode control; FOSMC: fractional-order sliding mode control.
Figure 7 shows a system response comparison between IOSMC-LQR and FOSMC-LQR. As the figures show, FOSMC-LQR can achieve steady tracking performance with small switching feedback control gain because it adopts extra fractional-order derivatives of the tracking error. On the other hand, to ensure the similar control performance, IOSMC-LQR requires a larger switching feedback control gain, which leads to a higher magnitude of control chattering and fierce oscillation of the sliding motion.

Comparison of system response between IOSMC-LQR and FOSMC-LQR. IOSMC: integer-order sliding mode control; LQR: linear-quadratic regulator; FOSMC: fractional-order sliding mode control.
Under the conditions of
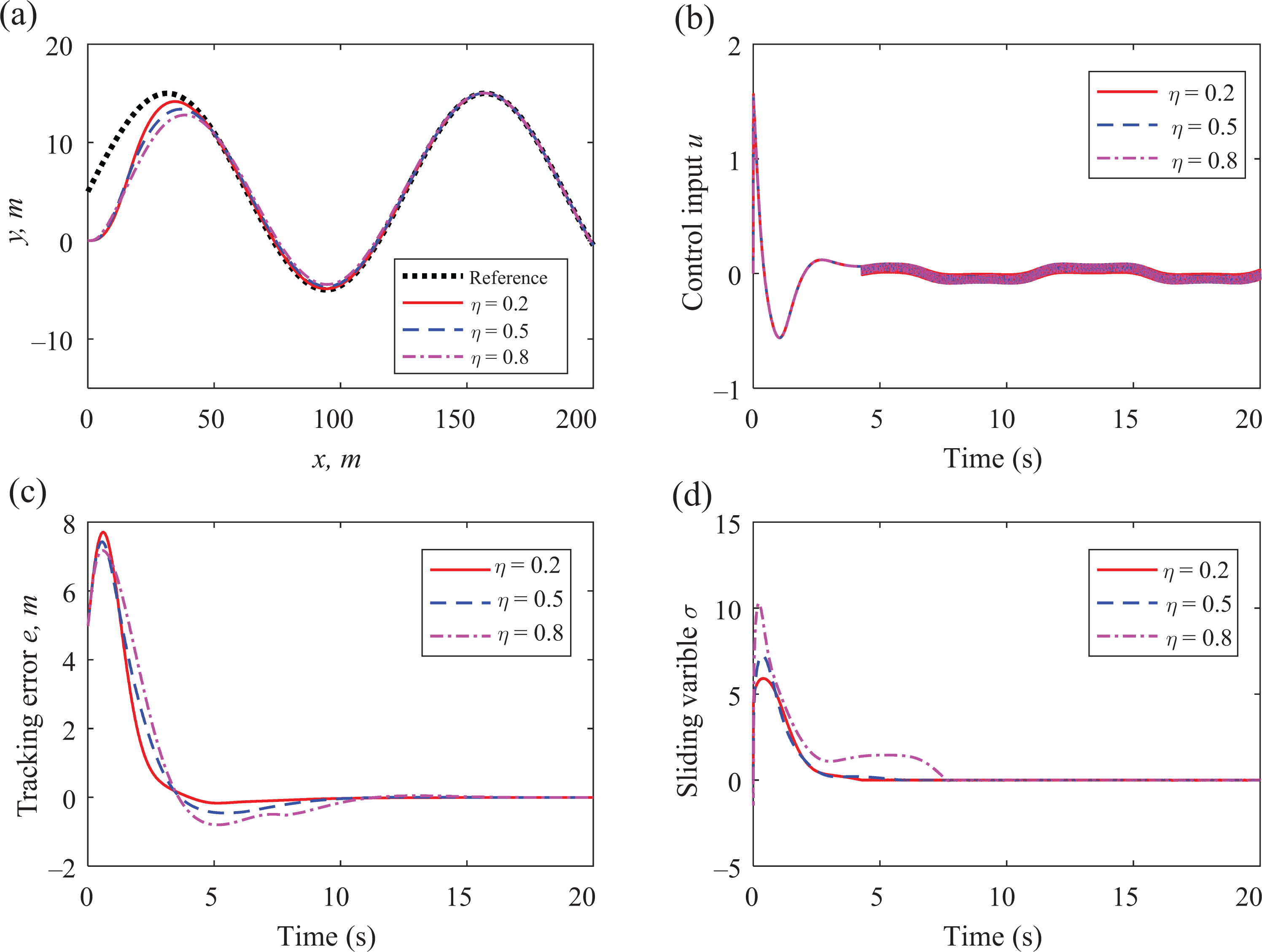
When

When
A dynamic model of a two-link rigid robot manipulator
The physical model of a two-link rigid robot that moves a horizontal plane is shown in Figure 10. Each joint is equipped with a motor for providing input torque, an encoder for measuring joint position, and a tachometer for measuring joint velocity. The objective of control design is to make the joint position q1 and q2 follow desired position histories
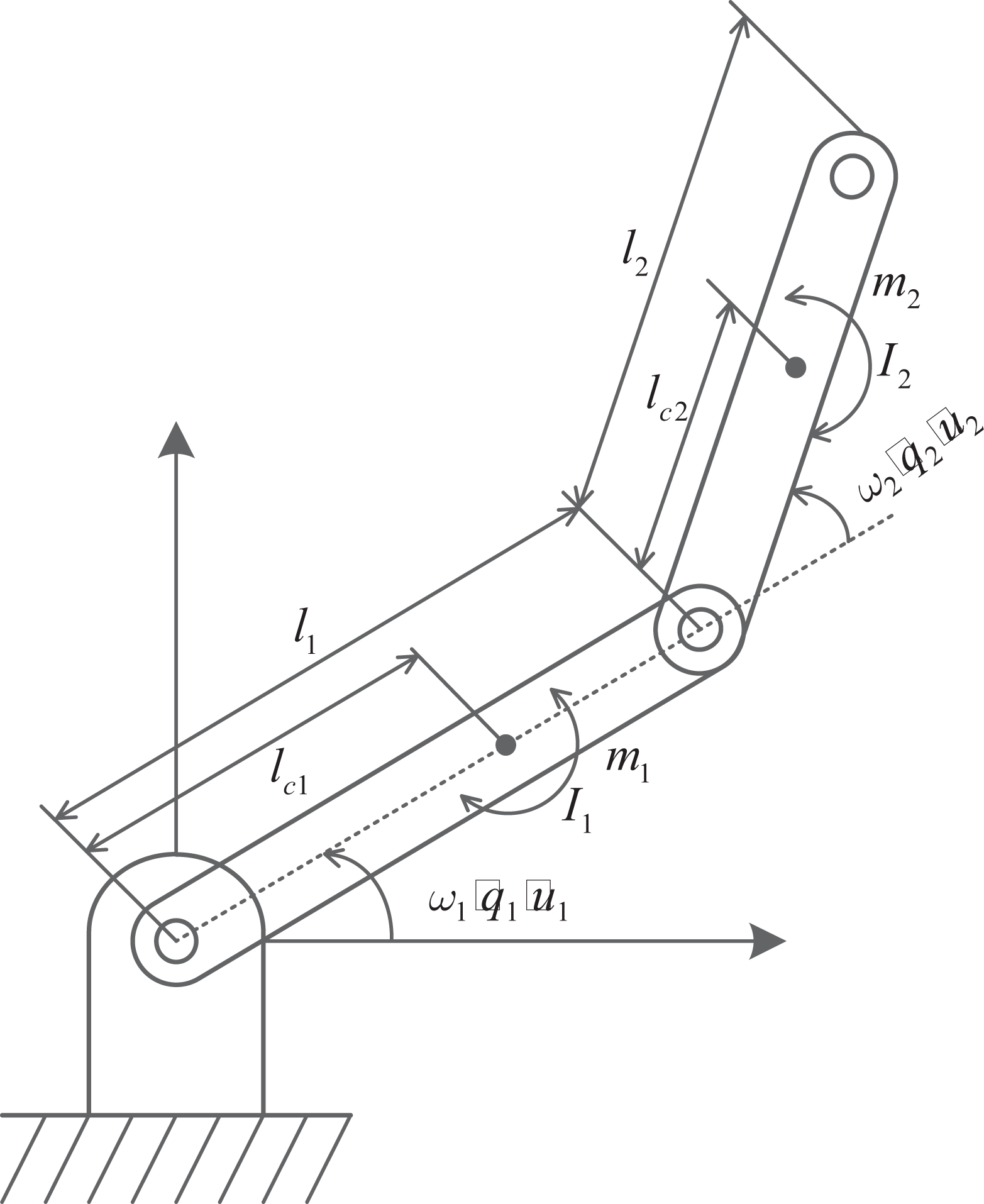
A two-link robot.
By using Lagrangian equations in classical dynamics, the differential equations of the robot are expressed as

where









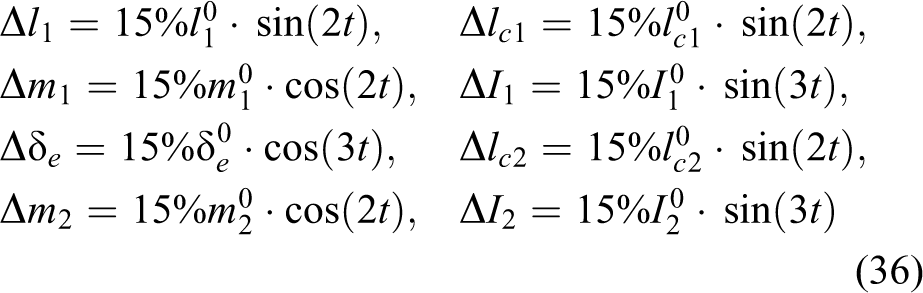
In real physical systems, the aforementioned constant parameters are always measured with inertial uncertainties. In this article, all of the parameter uncertainties are assumed as an additive variance to the nominal values. The nominal parameters are defined as 28

And the uncertain parameters are calculated as

where the additive variances (Δ) are parameter uncertainties, which are assigned as
Let

then, the robot system given by (34) is simplified as

which is the canonical form given by (9).
The desired trajectories are defined as


Then, we obtain

where
Since the relative degree of system (34) meets the condition of


where
Then, the auxiliary input v can be designed according to the control design procedures in section 4.
First, let

the continuous control parts

Second, define the fractional-order sliding surfaces as

By substituting v into (39), the nonlinear control law (FOSMC-LQR) is obtained as

In simulations, the robot initial condition is
Tracking curves of link 1 with nominal parameters.

Tracking curves of link 2 with nominal parameters.
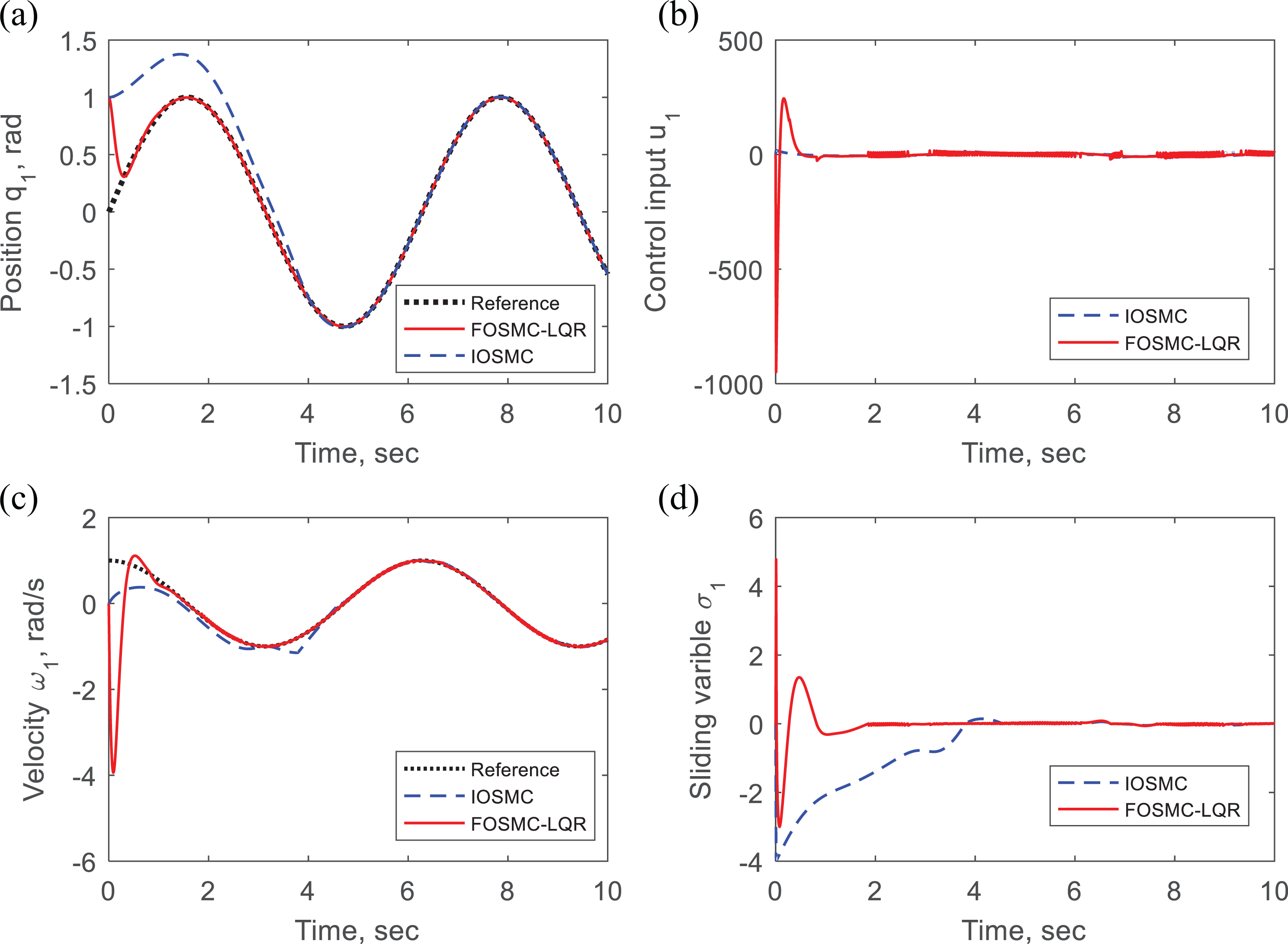
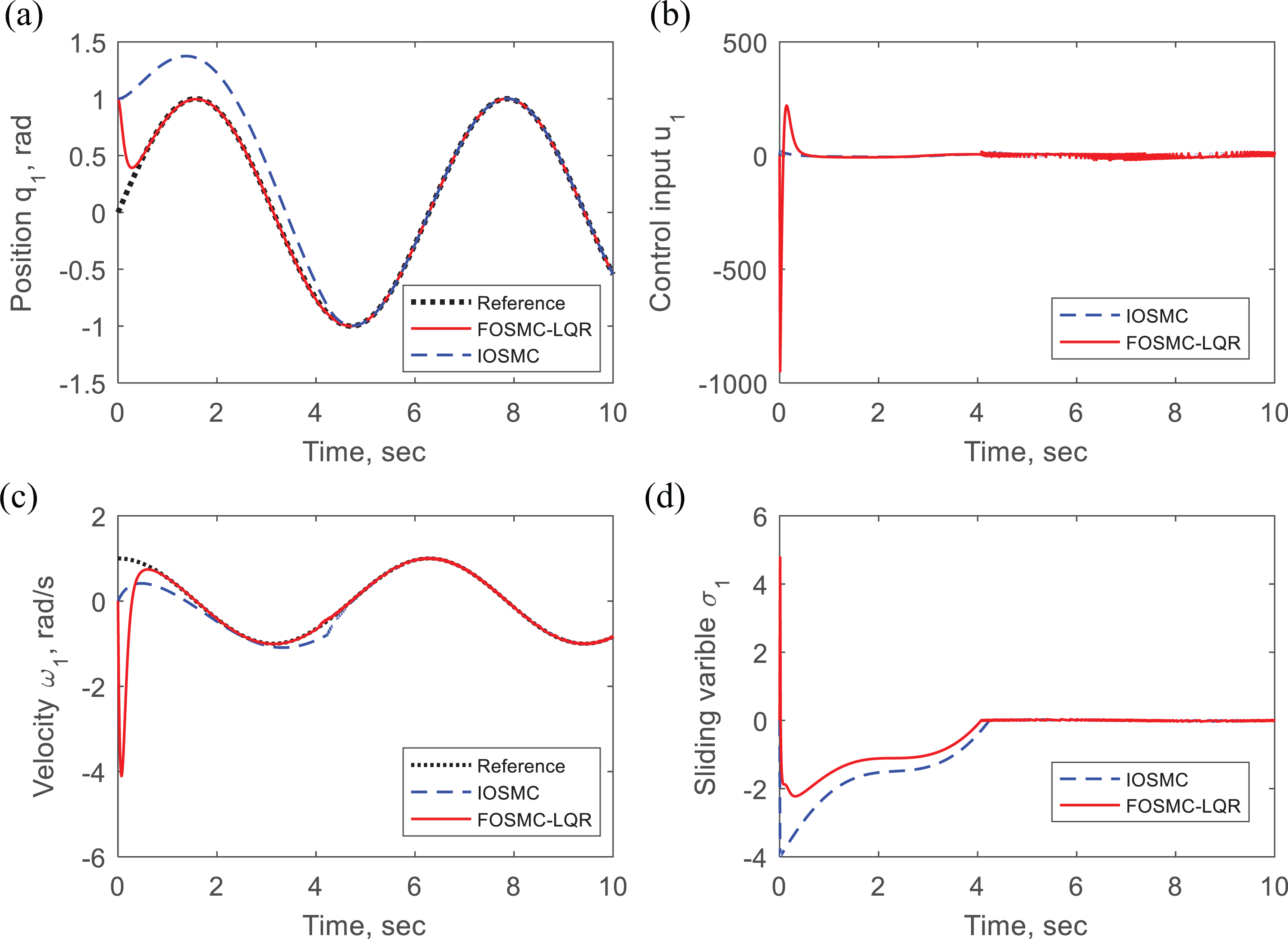
Tracking curves of link 1 with uncertain parameters.

Tracking curves of link 2 with uncertain parameters.
Figures 11 and 12 show a comparison of system response between the IOSMC and the controller proposed in this article (FOSMC-LQR) with nominal parameters. It can be easily seen that the closed-loop system response with FOSMC-LQR presents faster convergences of position tracking and velocity tracking. Because of choosing the same values of switching feedback control gain, the control signal presents the similar chattering when the closed-loop system is stable. However, the sliding motion of FOSMC-LQR has the faster convergence velocity in both q1 and q2 position channels.
Figures 13 and 14 show a comparison of system response between the IOSMC and the FOSMC-LQR with uncertain parameters. And the parameter uncertainties are described by (36). Due to the existence of parameter uncertainties, the closed-loop system response with IOSMC becomes more unsteady, which presents unsteady tracking performance in position and velocity tracking channels. However, the closed-loop system with FOSMC-LQR successfully rejects the time-varying parameter uncertainties and presents excellent tracking robustness.
Conclusion
In this article, a new FOSMC strategy based on LQR (FOSMC-LQR) for uncertain nonlinear systems has been proposed. Lyapunov stability theory is used to prove that the proposed controller results in the finite time convergence of the sliding motion and the global stability of the closed-loop control system. To demonstrate the effectiveness and advantages of the proposed controller, two academic examples, a kinematic model of a car and a dynamic model of a two-link robot, are simulated. The results of the simulation demonstrate that the proposed controller resulted in a faster convergence velocity, better tracking performance, and excellent system robustness. The proposed controller also performed better than conventional IOSMC, single LQR, and single FOSMC because it was designed based on LQR and employed extra fractional-order derivatives of the tracking error. Moreover, the magnitude of control chattering was reduced drastically.
Footnotes
Acknowledgment
The authors would like to thank the National Natural Science Fund of China(Fund NO. 11672235) for their financial support and also their help with information in this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the National Natural Science Fund of China (no. 11672235).