
Abstract
This article introduces a novel methodology for dealing with collision avoidance for groups of mobile robots. In particular, full dynamics are considered, since each robot is modeled as a Lagrangian dynamical system moving in a three-dimensional environment. Gyroscopic forces are utilized for defining the collision avoidance control strategy: This kind of forces leads to avoiding collisions, without interfering with the convergence properties of the multi-robot system’s desired control law. Collision avoidance introduces, in fact, a perturbation on the nominal behavior of the system: We define a method for choosing the direction of the gyroscopic force in an optimal manner, in such a way that perturbation is minimized. Collision avoidance and convergence properties are analytically demonstrated, and simulation results are provided for validation purpose.
Introduction
This article describes a collision avoidance control strategy for a group of mobile robots whose dynamics are described according to the Lagrangian model. 1
In the field of mobile robotics, collision avoidance is a primary issue that has thus been widely addressed in the past. When driving a robot to converge to the desired configuration, it is necessary to ensure that the interaction with the environment, as well as with static and dynamic obstacles, is sufficiently safe. This implies that the mobile robot’s trajectory needs to be computed in such a way that collisions are always avoided.
Even though providing a comprehensive review of the literature on this topic is out of the scope of this article, we will briefly describe some of the main approaches that can be found in the literature, without claiming completeness, with the purpose of highlighting the motivation for the proposed methodology.
Typically, the primary task of a mobile robot is defined with the objective of reaching the desired configuration (possibly optimizing some cost function). Nevertheless, appropriate strategies for collision avoidance need to be defined, when dealing with realistic applications. Moreover, it is often desirable to introduce a reactive behavior, which allows the robots to handle unforeseen situations. A remarkable example of application where a reactive behavior is needed in the case where unknown obstacles may appear and may be identified by means of onboard sensors. In this case, the trajectory of the mobile robots must be modified and adapted online, as an obstacle is acquired, in order to ensure safety.
However, the introduction of additional control strategies, defined for collision avoidance purposes, typically generates interference with the primary task of the mobile robots. Consider, for instance, artificial potential fields (see the works of Rimon and Koditschek, 2 Bouraine et al.,3 Hokayem et al.,4 Leonard and Fiorelli,5 Lindhe et al., 6 Sabattini et al.,7 Su et al.,8 and Tanner et al. 9 ), which are a widely exploited and very effective method for avoiding collisions. Exploiting these strategies, robots are driven to perform the gradient descent of an opportunely designed artificial potential field, whose gradient can be computed in a decentralized manner, and produces a repulsive force that drives each robot to move away from obstacles or other robots. These strategies are very attractive because of their effectiveness in creating a reactive behavior, which provably avoids collisions with unforeseen obstacles. Moreover, these strategies are effective in coordinated multi-robot scenarios as well. 4 –8 Furthermore, as shown in the work of Stastny et al., 10 artificial potential fields can be combined with advanced additional nonlinear control strategies, such as model predictive control, for achieving collision avoidance in groups of multiple robotic systems characterized by complex dynamical models.
However, their main drawback is in the well-known local minima problem 11 : Interacting with the primary task of the mobile robots (e.g. convergence to a common position, creating a formation), collision avoidance artificial potential fields can create undesired asymptotically stable configurations that prevent the robots from reaching the desired configuration.
This article aims at defining a collision avoidance control strategy that allows a group of cooperative mobile robots to avoid collisions among each other and with environmental obstacles. The objective is to introduce the smallest possible interference with the multi-robot system’s primary task. In order to create a provably safe collision avoidance reactive behavior, the dynamics of each robotic system are explicitly taken into account. Therefore, the collision avoidance action is defined as a gyroscopic force.
Several works on the use of gyroscopic forces for obstacle avoidance can be found in the literature, 12 –17 typically for mobile robots moving on a two-dimensional environment (i.e. the ground floor). Roughly speaking, a gyroscopic force is always perpendicular to the velocity of the robot: This implies that these forces do not do any work. Hence, this is the main motivation in using gyroscopic forces: In fact, this property guarantees that they do not modify the convergence characteristics of desired control laws defined as the gradient of an artificial potential field.
The article is organized as follows. Related works are analyzed in “Related work and main contribution” section. “Problem statement and system definition” section provides a description of the model of the system and formally introduces the problem analyzed in this article. The collision avoidance control law is then introduced in “Definition of the collision avoidance control law” section. Avoidance of collisions is then demonstrated in “Collision avoidance and convergence” section. As an example application, in “Application: Rendezvous for fully actuated spacecraft vehicles, with global connectivity maintenance” section, we consider a group of six degree-of-freedom fully actuated vehicles that are required to perform rendezvous in a cluttered environment, while maintaining connectivity. Simulation results are described in “Simulations” section. Finally, “Conclusions” section contains some concluding remarks.
Related work and main contribution
In this section, we will analyze the main works that can be found in the literature on the use of gyroscopic forces for collision avoidance purposes. Subsequently, the main contribution of this article will be highlighted.
When planning the path for a mobile robot, it is desirable to ensure both convergence to the desired configuration and avoidance of collisions with environmental obstacles and other robots.
In the works presented by De Medio and Oriolo 15 and De Luca and Oriolo, 16 the authors consider a path planning problem for ground mobile robots. Specifically, the path for each robot is computed exploiting the artificial potential field method 18 : The path for each robot is computed according to the negative gradient of a global artificial potential field, whose minimum is in the desired configuration. Instead of introducing repulsive potential fields (as in the standard artificial potential field method), De Medio and Oriolo 15 and De Luca and Oriolo 16 introduce the so-called vortex fields that are distortions of the global artificial potential field which make the robots turn around the obstacles. This strategy can be extended considering nonholonomic constraints while planning the path. 19 This strategy is formally guaranteed to avoid the creation of local minima, which are undesired blocking points.
A similar result is obtained in the work of Antonelli et al. 17 and Antonelli et al., 20,21 exploiting the null-space-based (NSB) behavioral control. In these strategies, several tasks are considered to be simultaneously accomplished by the robots. This approach can encode the necessity of reaching the desired configuration while avoiding collisions. Roughly speaking, the lowest priority task (i.e. convergence to the desired configuration) is performed as desired only if it does not interfere with the highest priority task (i.e. collision avoidance). If there is an interference between the two tasks, the highest priority task is always fulfilled, while only the projection of the lowest priority task on the null-space of the highest priority task is accomplished. Therefore, collision avoidance is always guaranteed, while convergence to the desired configuration is only partially fulfilled, in such a way that does not interfere with collision avoidance.
Both the vortex field and the NSB are very effective strategies for collision-free path planning. Considering the (possibly nonholonomic) kinematic model of a mobile robot, these strategies ensure the definition of a trajectory that drives the robot to the desired configuration while avoiding collisions with obstacles. However, it is worth noting that these strategies solve a kinematic problem: Dynamics of the robots are, in fact, not considered. Even though path planning is an inherently kinematic problem, the dynamic behavior of a mobile robot cannot always be neglected, when solving the collision avoidance problem. In fact, considering the presence of unpredictable obstacles, whose position is acquired by limited range sensors, it is necessary to ensure avoidance of collision, regardless of the velocity of the robot when the obstacle is identified. Therefore, is it important to explicitly consider the dynamic behavior of the mobile robots, when defining the collision avoidance control strategy?
Along these lines, in the study of Arogeti and Ailon, 22 the authors consider a group of quadrotors, modeled as nonlinear systems. Around each quadrotor, a forbidden region is then defined: Path planning methods are then used for ensuring that each quadrotor does not enter the forbidden region related to other quadrotors. A similar strategy is defined in the study of Jin et al., 23 where obstacle-free regions in the environment are computed, taking into account the obstacles’ velocities as well. The motion of the robots is then constrained within these regions.
In the studies of Chang et al., 12 Chang and Marsden, 13 and Mi et al., 24,25 the authors model the mobile robots as double integrator systems and develop a collision avoidance strategy based on the combination of a gyroscopic force and a braking force. In particular, the braking force is an appropriately defined damping force that ensures avoidance of collisions. Conversely, the gyroscopic force is in charge of making the robot move around the obstacles, thus ensuring convergence to the desired configuration. Inspired by this works, in this article we design a collision avoidance control strategy based on the use of gyroscopic forces. Unlike previous approaches, we explicitly consider the complete dynamics of the mobile robots, which are modeled as Lagrangian dynamical systems. Moreover, we consider the case where the robots move in a three-dimensional environment. While a few preliminary attempts on defining three-dimensional gyroscopic forces for obstacle avoidance can be found in the literature, 13,14 to the best of the authors’ knowledge optimality in the choice of the gyroscopic force has never been considered. In fact, given the vector describing each robot’s velocity, there are infinitely many directions that define a gyroscopic force, namely, all the forces laying onto the plane that is perpendicular to the velocity itself. Therefore, in this article, we define a method to select the optimal direction for the gyroscopic force, in order to introduce the smallest possible interference with the desired control law.
Hence, the main contribution of this article can be summarized as follows: Gyroscopic forces are defined for obstacle avoidance, considering the motion of the robots in a three-dimensional environment. The dynamics of the mobile robots are explicitly considered, describing the robots by means of the Lagrangian dynamical model. An optimality criterion is defined to select the direction of the gyroscopic force. Collision avoidance and convergence to the desired configuration are analytically proven, explicitly considering the dynamics of a system of multiple mobile robots.
This article extends the preliminary results presented by Sabattini et al., 26 providing formal demonstration of all the presented results for the multi-robot application. Moreover, the braking force is redefined, providing a less conservative definition.
Problem statement and system definition
Consider a group of N homogeneous mobile robots, and define

where
Let

where the operator diag(⋅) defines a block-diagonal matrix. Hence, the matrices in equation (2) define the multi-robot Lagrangian system. Namely, the matrix
Then, defining the multi-robot control input

Moreover, we make the following assumptions on the robots considered in this article.
Assumption 1
The translational degrees-of-freedom of each robot are fully actuated.
The shape of each robot can be bounded within a sphere.
Robots are homogeneous, that is, they have the same shape, and they are controlled by means of the same control strategy.
Each robot can identify the presence of an obstacle and measure its relative position and the distance from its boundary, within the detection range R > 0.
The collision avoidance problem will now be formally defined. We will hereafter make the following assumptions on the obstacles in the environment.
Assumption 2
The obstacles are convex and static.
The distance between two obstacles is greater than the size of a robot.
Therefore, we are assuming that the only moving obstacles are the robots themselves. Assumptions on the convexity and separation of the obstacles can be relaxed bounding each nonconvex obstacle (or each group of close obstacles) within a convex shape.
We will take into account two kinds of collisions: Collision between a robot and an obstacle. Inter-robot collisions, that is, a collision between two robots.
Considering assumptions 1 and 2, only translational dynamics will be hereafter taken into account, as rotational motion does not cause collision.
Hence, let:

where
Moreover, we will hereafter use the term obstacle to indicate a generic entity with which a collision can happen. Conversely, when explicitly referring to a static object in the environment, we will use the term environmental obstacle.
According to assumption 1 (iv), we now introduce the definition of active obstacle.
Definition 1
An obstacle is active from the i th robot’s perspective, if the obstacle is within the detection range of the robot, and if the robot’s velocity has a nonzero component that points toward the obstacle.
According to assumption 1, it is possible to conclude that this relationship is mutual, when referring to inter-robot collision: Namely, if robot j is an active obstacle for robot i, then robot i is an active obstacle for robot j.
Consider, without loss generality, the case where Ψ
i
obstacles are within the detection range of the i th robot. Subsequently, define
Hence, we introduce the function

Namely, σi,j = 1 if the j th obstacle is active, from the i th robot’s perspective, according to Definition 1.
The set of active obstacles

It is then possible to define σi ∈ {0, 1} as follows

where
Throughout the article, we will consider the following situation: The objective of the multi-robot system is defined as the gradient descent of an appropriately defined artificial potential field. Specifically, let

where

Defining then an artificial potential field

Therefore, the objective of this control law is to drive the multi-robot system to the following desired configuration

where
We make the following assumption on the desired configuration.
Assumption 3
When
The distance between each obstacle and each position a robot will take when
This technical assumptions ensure that obstacles do not prevent robots from reaching their desired position, and that robots do not interfere with each other, when some of them have already reached the desired position.
We also assume that the control law in equation (10) can be computed in a decentralized manner from each robot. Specifically, define the artificial potential field

On these lines, we assume that the desired control term

∀i = 1, … , N. Moreover, let
Definition of the collision avoidance control law
According to the definitions and assumptions introduced in Problem statement and system definition section, in this section we will define the collision avoidance control law. Specifically, for each robot, we define the control input

∀i = 1, … , N. Then, define the following quantities

where

We will hereafter define the quantities introduced in equation (14).
Braking force
The term

where

Then, let

where sgn(⋅) represents the signum function, and the parameter γi,j > 0 will be defined hereafter. Hence, we define each component of the braking force as follows

It is worth remarking that the braking force is defined only with respect to active obstacles: Therefore, according to definition 1, we can consider only the case in which vi,j > 0. Subsequently, equation (19) can be simplified as follows

Moreover, it is worth remarking that

Considering then the definition of

Since
Obstacle avoidance gyroscopic force
The term

where

where
It is worth noting that equation (25) defines a gyroscopic force. In fact, The vector wi is perpendicular to The vector wi is then normalized and multiplied by the constant value
Since

According to equation (24), a similar property holds for

Hence,

As will be clarified later on, this feature ensures that the presence of this force does not modify the convergence properties of the desired artificial potential-based control law.
It is worth noting that this property is verified for any choice of the gyroscopic force, that is, any force
As is well known, given a vector
It is worth noting that, according to equation (25), the force The force The force (a) If (b) If
Hence, in order to take into account these cases, the definition of

Subsequently, define

∀i = 1, … , N. Note that the choice of the vector ni will be clarified in the Proof of Corollary 2.
Subsequently, let

∀i = 1, … , N. Hence, the definition of wi given in equation (25) is modified as follows
where
Finally, the force

where
Collision avoidance and convergence
In this section, we will show that the control action introduced in Definition of the collision avoidance control law section ensures both collision avoidance and convergence to the desired configuration defined as the minimum of the potential function
For this purpose, define

∀i = 1, … , N. Subsequently, the kinetic energy of the multi-robot system

Therefore, the total energy of the multi-robot system

According to the definition of the artificial potential field

The following theorem shows that the proposed control law ensures that the total energy of the multi-robot system does not increase, as the system evolves. This result will be instrumental for proving collision avoidance and convergence to the desired configuration.
Theorem 1
Consider the dynamical system described in equation (3) and the control law defined in equation (8). Consider also the case where the gravity term
Proof
Consider the total energy of the multi-robot system

As the gravity term

Then, from equations (38) and (39), the time derivative of the total energy of the multi-robot system can be rewritten as follows

This may be rewritten as follows

Let

As is well known,
23
the matrix

As
Using similar arguments, it is possible to demonstrate that the total energy of the i th robot, that is,
Corollary 1
Consider the dynamical system described in equation (1), and the control law defined in equation (9), for the generic i th robot. Consider also the case where the gravity term
Proof
The proof is analogous to that of theorem 1 and is then omitted.
We will now exploit the results of theorem 1 and corollary 1 to demonstrate that the proposed control strategy ensures collision avoidance. For this purpose, consider the case where the j th obstacle becomes active, for robot i, at time t = t0. Let ni,j(t) be the vector connecting the i th robot’s position to the position of the j th obstacle, at time t. Then, define

Moreover, with a slight abuse of notation, let

In order to completely define the collision avoidance control action, the parameter γi,j > 0 introduced in equation (19) has to be defined. For this purpose, assume that the velocity of the robots is bounded, and that the upper bound on the velocity is known. Then assuming the mass matrix of each robot to be bounded, the kinetic energy is upper bounded as well. Namely,

where

Then, the parameter γi,j can be defined as follows:

Based on the results of theorem 1, the following theorem shows that this definition of γi,j ensures collision avoidance.
Theorem 2
Consider the dynamical system described in equation (1) and the control law defined in equation (14). Then, the braking force in equation (20), with the parameter γi,j defined as in equation (48), guarantees: avoidance of collisions with environmental obstacles and avoidance of inter-robot collisions.
Proof
We show that the braking force is able to dissipate a sufficient amount of energy, in order to avoid collisions.
Consider the j th active obstacle with respect to the i th robot and consider the translational motion of the i th robot. We will now take into account only the component of the robot’s motion toward the obstacle, that is, the component of the motion along ni,j. Specifically, let

According to definition 1, in the presence of an active obstacle,
Considering the fact that, as stated before, when the j th obstacle is active,

with si,j being the i th robot’s displacement. Without loss of generality, we considered si,j = 0 at time t = t0, and we have dropped the dependence on time.
Then, assuming the available energy to the i th robot to be equal to

Hence, in order to ensure collision avoidance, it is sufficient to guarantee that

Consider then the definition of γi,j given in equation (48), the condition in equation (53) can be rewritten as follows

With a slight abuse of notation, let

for time t > t0.
Then, according to equations (45) and (47), it is possible to conclude that

From corollary 1, we know that the total energy of the i th robot does not increase as the system evolves. Therefore

for all time t > t0.
According to equations (56) and (57), it is possible to conclude that

∀t > t0. Therefore, the condition in equation (55) is satisfied ∀t > t0, which proves the statement. Following the same arguments, it is possible to demonstrate that the proposed control law ensures avoidance of collisions between the i th robot and the j th robot. In particular, according to corollary 1, both
Therefore, letting all the energy to be dissipated by the braking force, the lengths of the robots’ displacements can be upper bounded as follows

In this case, the i th robot is an active obstacle for the j th one and vice versa. Therefore,
With a slight abuse of notation, let

for all time t > t0.
Consider then the definition of γi,j, γj,i given in equation (48), and consider the inequalities given in equations (56) and (57). Therefore, equation (60) can be rewritten as follows
According to equations (56) and (57), it is possible to conclude that

∀t > t0. Therefore, the condition in equation (61) is satisfied ∀t > t0, which proves the statement.
In theorem 2, we have demonstrated that, thanks to the braking force, collisions with environmental obstacles, and among robots, are always avoided. However, the introduction of the gyroscopic force is necessary for correctly performing obstacle avoidance and converging to the desired configuration.
In fact, using only the braking force would ensure collision avoidance but might cause deadlock situations. Namely, consider the case where the braking force

In this case, the robots would be forced to remain in their current positions, even though they are not in the desired configuration (i.e.
In theorem 1, we have demonstrated that the total energy of the multi-robot system does not increase, as the system evolves. The following corollary shows that, thanks to the gyroscopic force, deadlocks are avoided, and the multi-robot system eventually converges to the desired configuration.
Corollary 2
Consider the dynamical system described in equation (3) and the control law defined in equation (8). Consider also the case where the gravity term
Proof
Consider the total energy of the system
We will now show that the only steady-state configurations are local minima of
According to equation (43), In case there are no obstacles, when the multi-robot system is not in the desired configuration, it is always subject to a force Referring, without loss of generality, to the i th robot, consider the presence of Ψ
i
active obstacles. As stated before, we are considering the case

Therefore, according to equation (21), β(vi,j) = γi,j. Subsequently, in this case, according to equation (20)

Consider the vector ni defined as in equation (29), namely

Subsequently, let

According to equations (24) and (33), it is possible to decompose ua as follows

where, according to equation (33),
Hence, equation (64) may be rewritten as follows

where

Hence, unless
Conversely, in case

where, according to equation (32),
Hence, as in the previous case, it is possible to conclude that the i th robot is subject to a nonzero force that makes it accelerate.
It is then possible to conclude that the only steady-state configurations are represented by the ones described as in equation (11), namely

where
Application: Rendezvous for fully actuated spacecraft vehicles, with global connectivity maintenance
In this section, we apply the previously described obstacle avoidance strategy to a group of fully actuated spacecraft vehicles performing rendezvous while keeping connectivity.
A decentralized strategy for global connectivity maintenance for groups of Lagrangian systems, based on the gradient descend of an artificial potential field, was introduced by Sabattini and coworkers 29 –31 and will now be briefly described, as well as the dynamical model of the spacecraft vehicles.
Spacecraft vehicles dynamical model
We consider a group of six degree-of-freedom spacecraft vehicles, whose dynamics are described by Kristiansen et al. 32
Specifically, the configuration of these vehicles is described by the following state vectors

where
The following relationship holds

where
Referring to equation (1), the matrices that describe the dynamics of each spacecraft vehicle are defined as follows

where
From equation (72), it is easy to see that translations and rotations are decoupled and can be independently controlled. Hence, hereafter we will consider only the translational dynamics of the system, as in the previous sections. The matrix

The gravity term gt(xi) is defined as follows
where rs is the average radius of the orbit of the spacecraft. Let G be the universal constant of gravity, and let Me be the mass of the Earth, then μ ≈ GMe.
Connectivity maintenance
The communication architecture among a group of robot can be effectively modeled as graph, which is usually referred to as the communication graph. 34 As is well known, considering an undirected graph, the communication graph is connected if and only if the second-smallest eigenvalue of its Laplacian matrix L is positive. For this reason, this eigenvalue, which will be hereafter referred to as λ2, is known as the algebraic connectivity of the graph.
We consider the following connectivity model: Two robots can communicate if their Euclidean distance is less than or equal to the communication radius Rc > 0. As a consequence, as in the works of Sabattini and coworkers, 29 –31 we define a weighted communication graph, whose edge weights are defined as follows
The scalar parameter ν is chosen to satisfy the threshold condition
This definition of the edge weights is motivated by the fact that λ2 is a nonincreasing function of each edge weight 34 : Hence, as two connected robots increase their distance, the value of λ2 decreases, until they disconnect.
The control law defined by Sabattini and coworkers
29,30
drives the robot to perform a gradient descent of an appropriately designed function of λ2, namely,

Robots are then driven to perform a gradient descent of
It is worth noting that, even though the algebraic connectivity of the communication graph is a global quantity, the connectivity maintenance control action can be implemented exploiting an estimate of λ2 computed by means of the bounded-error decentralized estimation procedure introduced by Sabattini et al. 35 –37
Rendezvous
As an example, we consider the following cooperative task to be completed by the group of robots: meeting at some common point, exploiting only local information. This task is known in the literature as rendezvous.
It is easy to prove that, as long as the communication graph is connected, rendezvous can be obtained making the robots perform a gradient descent of the artificial potential function

where Kr > 0 is a constant, and
Simulations
In this section, we describe the results of the Matlab (version: R2015b) simulations performed to validate the control strategy presented in this article. Specifically, simulations have been performed in the scenario described in Application: Rendezvous for fully actuated spacecraft vehicles, with global connectivity maintenance section, that is, a group of fully actuated Lagrangian dynamical systems that, starting from randomly chosen initial positions, are driven to achieve rendezvous, performing a gradient descent of the artificial potential function defined in equation (77), while moving among randomly placed point obstacles.
The proposed obstacle avoidance control strategy has been compared with a standard artificial potential field-based control law.
9
In particular, let

where R0 = 0.1R is the minimum allowed distance between a robot and an obstacle, and the set
In order to compare the performance of the two different collision avoidance control strategies, we introduce a criterion to evaluate the distortion of the control law. Consider the total control law u in equation (1), and consider the definition of ud as the desired control law, defined according to equation (14). Then, u can be rewritten as

Clearly, for the obstacle avoidance action to introduce small interference with the primary task, δ is required to be close to 1.
We will hereafter report the results related to a representative example, where four robots were utilized, moving in a three-dimensional environment (x, y, z) filled with 150 randomly placed point obstacles.
The data reported in Table 1 summarize the results obtained in 100 simulation runs (mean value and standard deviation), starting from randomly varying initial positions.
Comparison between gyroscopic forces and artificial potential field-based collision avoidance strategy.
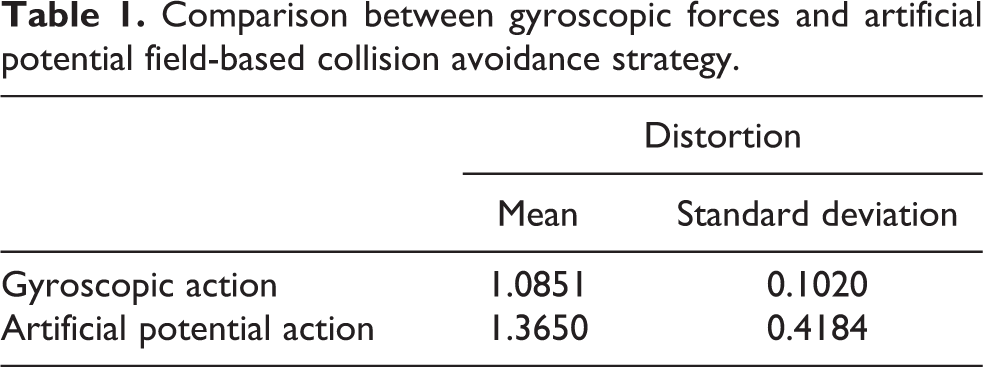
According to the simulation results, it is possible to conclude that the proposed control law introduces a much smaller distortion in the resulting control law, if compared with an artificial potential field-based control action: approximately 8.5% versus 36.5%.
The results of a typical simulation run are summarized hereafter. In particular, trajectories of the robots are depicted in Figure 1: In particular, Figure 1(a) depicts the trajectories obtained utilizing, for collision avoidance, the method based on gyroscopic forces proposed in this article, while Figure 1(b) depicts the trajectories obtained utilizing artificial potential fields. It is possible to see that, in the presented example, due to the presence of local minima, artificial potential fields prevent the robots from converging to a rendezvous configuration.

Trajectories of the robots: collision avoidance performed with (a) gyroscopic forces and (b) artificial potential field. Initial positions are represented with stars and final positions with diamonds. Green circles represent randomly placed point obstacles.
This fact is also highlighted comparing the distortion parameter. In particular, Figure 2 shows the value of the distortion index δ as the system evolves, with both collision avoidance control laws: Blue solid line represents the results obtained with the collision avoidance strategy presented in this article, while red dashed line is obtained with the artificial potential field control law in equation (78).
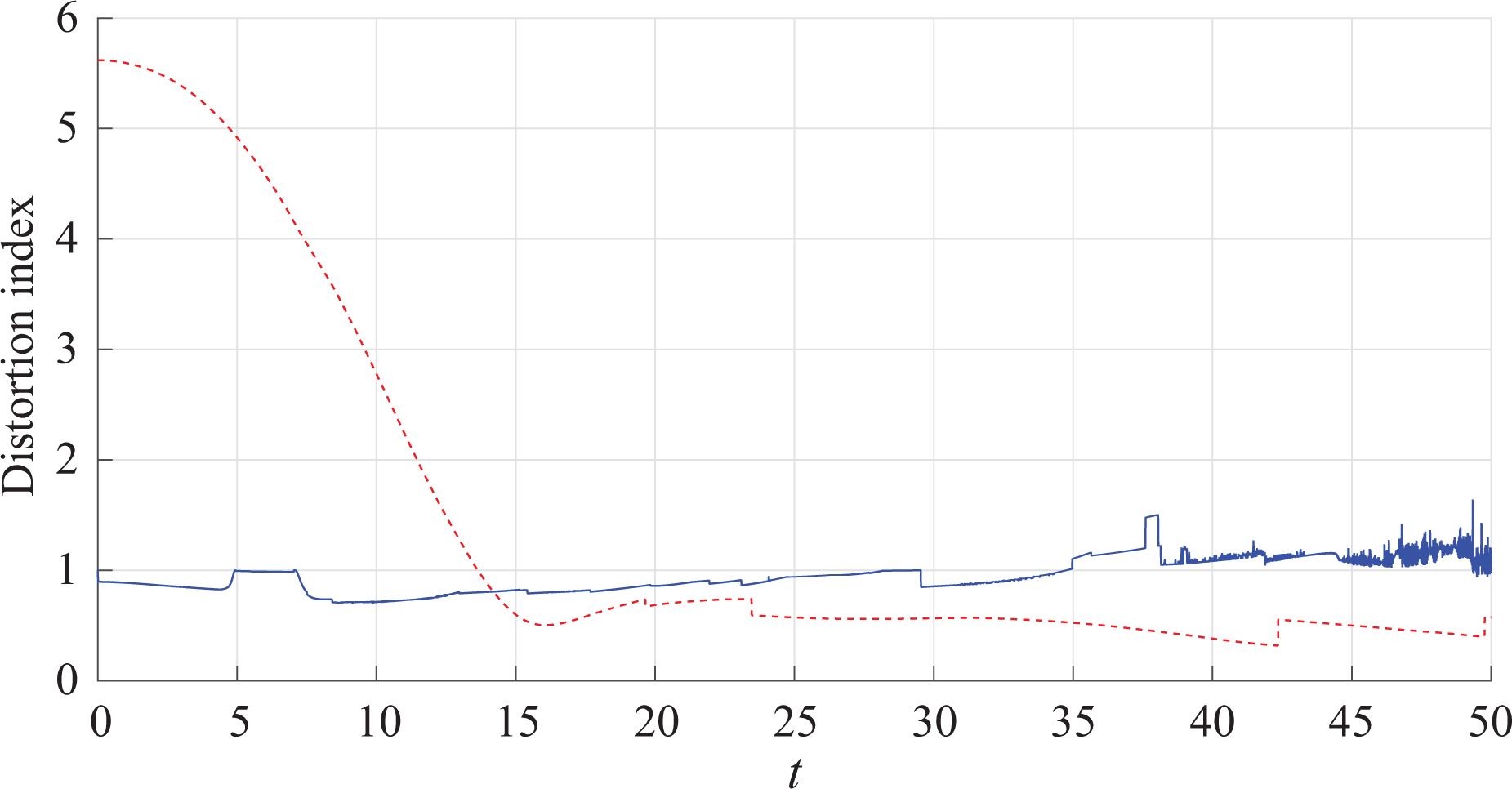
Value of the distortion index δ during a typical simulation run: Blue solid line represents the results obtained with the collision avoidance strategy presented in this article, while red dashed line is obtained with the artificial potential field control law in equation (78).
The two collision avoidance control laws were also compared in terms of amplitude of the control action itself. In particular, Figures 3 and 4 represent the maximum value (among the different robots) of the amplitude of the control action, along the three axes (x, y, z). It is possible to note that the amplitude of the proposed collision avoidance control action based on gyroscopic forces is generally smaller than (or comparable with) the amplitude of the corresponding artificial potential field-based control action.

Maximum value of the amplitude of the collision avoidance control action along the three axes (x, y, z): gyroscopic forces.

Maximum value of the amplitude of the collision avoidance control action along the three axes (x, y, z): artificial potential fields.
Moreover, to validate the effectiveness of the collision avoidance strategy proposed in this article, Figure 5 shows the value of the minimum distance between a robot and an obstacle, as the system evolves, in a typical simulation run. As expected, it is always bounded away from zero.
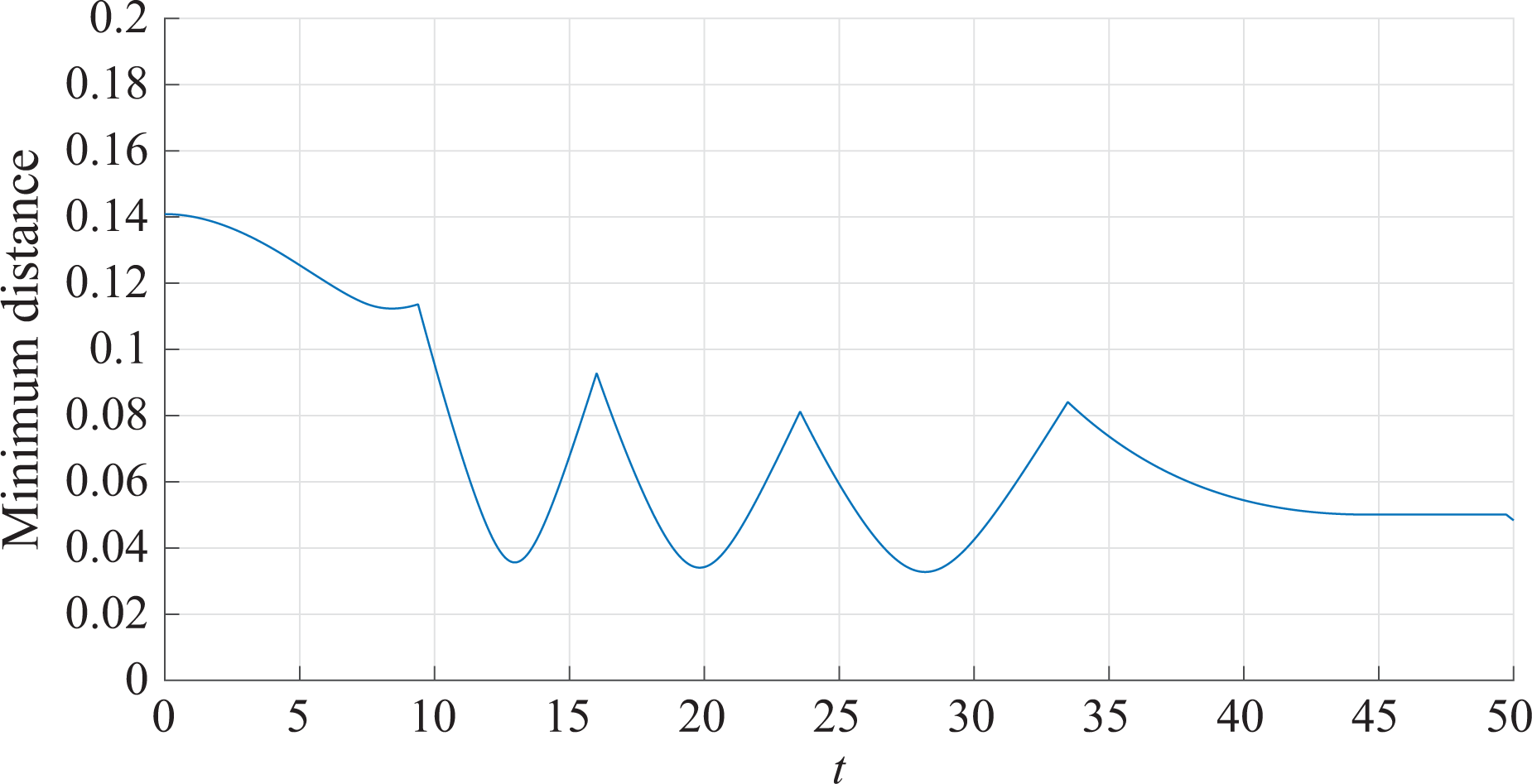
Minimum distance between a robot and an obstacle.
Conclusions
In this article, we propose a methodology for addressing collision avoidance for groups of mobile robots. The methodology is designed explicitly considering the full dynamics of the robots that are modeled as Lagrangian dynamical systems moving in a three-dimensional environment.
Collision avoidance is achieved by means of an appropriately defined gyroscopic force. This choice is motivated by the fact that, by definition, gyroscopic forces do not do any work. Therefore, considering a multi-robot system whose desired behavior is achieved with a potential-based control strategy, the introduction of a gyroscopic force does not modify the convergence properties. Moreover, the control law proposed in this article was defined in an optimized manner, in order to introduce the smallest possible perturbation with respect to the desired behavior of the system.
The proposed control strategy was analytically proven to guarantee collision avoidance and convergence to the desired configuration for multiple robotic systems. Simulation results were also provided for validation purpose.
Future work will aim at extending the proposed methodology to underactuated and nonholonomic systems, moving in the presence of nonconvex obstacles. Moreover, we aim at investigating the effect of the dynamics of realistic actuators on the performance of the collision avoidance control strategy. This will make it possible to perform experiments in realistic applications.
Footnotes
Authors’ note
This article is a revised and expanded version of a paper entitled Collision Avoidance Using Gyroscopic Forces for Cooperative Lagrangian Dynamical Systems presented at IEEE International Conference on Robotics and Automation (ICRA) held in Karlsruhe, Germany, in May 2013.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.