
Abstract
This article presents finite-time stabilization methods of switched linear systems with disturbances. After extending finite-time stabilization and finite-time boundedness definitions to switched linear systems, sufficient conditions guaranteeing system finite-time boundedness are proposed, by which the state feedback controller method is obtained. For a class of switched terminal guidance systems, the methods are illustrated by application to guidance design to solve the finite-time stabilization problem considering nonzero initial conditions and state constraints.
Introduction
A switched system is a hybrid system that includes various subsystems and a rule that governs the switching among the subsystems. The main efforts typically focus on the analysis of dynamic behaviors, such as stability, controllability, accessibility, observability, and fault diagnosis, and aim to design controllers with guaranteed stability and optimized performance. 1 –6 So far, the most stabilities involved in the existing results basically focus on ‘infinite’ time interval, such as Lyapunov asymptotic stability. Recently, finite-time stabilization (FTS) for some stochastic nonlinear systems was studied in the literature. 7 Finite-time state feedback controller was constructed for high-order stochastic nonlinear systems in strict-feedback form in the study by Wang and Zhu. 8 Finite-time output feedback stabilization of a class of high-order stochastic nonlinear systems was investigated in the study by Zhai. 9 The FTS of a class of switched stochastic nonlinear systems in p-normal form was invested in the study by Huang and Xiang. 10
However, in various practical operations, system stability (usually in the sense of Lyapunov) as well as a bound of system trajectories over a fixed short time are both interested. In other words, the main concern is the behavior of the system within a finite-time interval, such as aerospace control systems and guidance systems, the control processes of which are implemented in a finite-time interval. Moreover, the disturbances in practice should not be ignored. Hence, we aim to investigate the FTS of switched linear systems with disturbances, as dealt in this article.
In the 1960s, Yin and Khoo 7 initially raised up the concept about “short-term stability” under FTS. Followed by a large amount of research arise after the concept was carried out, the idea of “finite-time contractive stability” was first brought up by Wang and Zhu 8 and Zhai 9 in 1965. Finite-time contractive stability is defined as “finite-time bounded-input bounded-output (BIBO) stability”; it is approved to consider nonlinear systems with disturbance and it is now commonly known as “finite-time boundedness (FTB).” Up until now, much work has been done in this field. Given a bound on the initial condition, a system is said to be finite-time stable if the state does not exceed a certain threshold during a specified time interval. It is worth noting that there is a different notion of FTS, 10 which requires the system state to reach the system equilibrium in a finite-time interval, and the property is called finite-time attractiveness in some research. 11,12 In the remainder of this article, FTS that we mentioned refers to the former one.
While external disturbances are considered, FTS is extended to FTB. In the light of results coming from linear matrix inequality (LMI) theory, many optimization and control problems can be formulated and solved using LMIs. 13,14 Considering linear Time-invariant systems, Chen and Jiao 15 proposed the sufficient conditions for FTB and FTS method. Then, the results are extended to time-varying continuous systems and discrete systems. 16 The dynamic output feedback controller design problem was studied in the literature. 17 Considering impulsive dynamical systems, the sufficient conditions of FTS were proposed in the study by He and Wang. 18 FTS of linear discrete-time system with time-varying delay was studied in the literature. 19 Considering linear time-varying systems with jumps and impulsive dynamical linear systems, the conditions of FTS and FTB were proposed. 20,21 Recently, Ambrosino et al. 22 also proposed the necessary and sufficient conditions for FTS of impulsive dynamical linear systems.
Therefore, the article aims to redefine the FTS for the switched linear system and investigate the corresponding control methods. The “Problem formulation” section of this article presents the basic descriptions and the problem statement. The “Main result” section proposes the requirements for FTB of a switched linear system. The state feedback controller design methods are then presented. The “Application example” section shows the appropriate applications for this method for the terminal guidance systems with switched dynamics. The last section gives the conclusion.
Problem formulation
Let

where
Definition 1 (FTS of switched linear system):
System (1) is the FTS with respect to

The concept of state boundedness is more general and also concerns the behavior of the state in the attendance of both given initial and external disturbances.
Definition 2 (FTB of switched linear system):
Consider system

where

Problem 1 (FTS of switched linear systems with disturbances):
Consider the system

where

where

where
Main result
Theorem 1 (FTB sufficient condition of switched linear system):
System (3) is FTB with respect to


where

Pre- and post-multiplying (8) by

we obtain

From equations (10) and (12), we can obtain

multiplying (13) by

Noting αi > 0, we have

Noting

From equations (15) and (16), we can obtain

which can be rewritten as

Noting

If

Then, the proof follows by the recursive way.


For positive numbers λ1 and λ2, the inequality can be converted to an LMI using Schur complements.

where
Application example
A terminal guidance scenario 23 –27 is the typical finite-time process, 28 –32 which is presented in Figure 1.

Terminal guidance scenario geometry.
The distance between the missile and the target is indicated by r, l is the perpendicular deviation between the missile and the target, and velocities for the missile and the target are expressed as
In this situation, ϕM and ϕT are small, since the missile and the target can be approximately considered to be head-on form, then

Define

which means that the missile needs time τM(t) to adjust from current acceleration aM to expected acceleration aMC. And the target has a fixed τT, then we have

From equations (22) and (23), a state space description of the system can be obtained


where y is the output, which can be used as the miss distance of the missile to the target. The guidance process completes in a finite-time interval [0, T], and

where
For the missile, acceleration command of the target aTC can be considered as an external disturbance, the purpose of guidance design is to minimize the miss distance in finite-time interval [0, T], and some indices not exceeding the physical constraints, such as seeker’s view field and missile acceleration. Therefore, the proposed method can be used to guidance designing.
Consider systems (28) and (29), finite-time interval t ∈ [0, 10],

which means the missile switches between two types of actuator, the suitable αi, ci, ci + 1, i = (1, 2, 3, 4), aTC is shown in Figure 2.

Target maneuver acceleration command aTC.
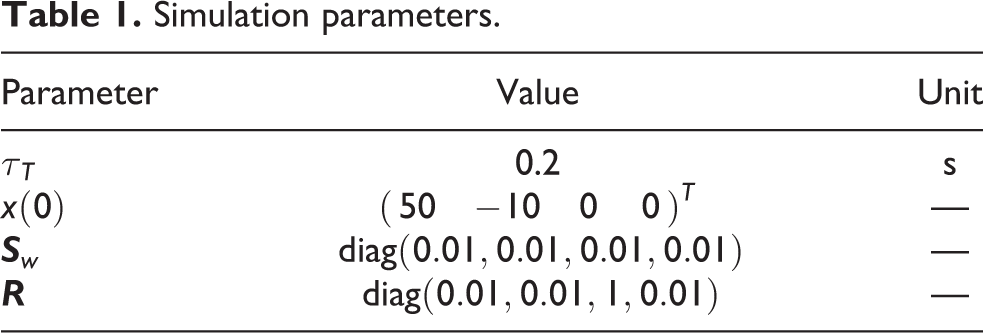
Other simulation parameters are given in Table 1.
Simulation parameters.
According to theorem 2, the controller gain




which are added into the original system. Simulation results are shown in Figures 3 to 5. For comparison, the cases using

Comparison of the output

Acceleration a comparison of the proposed method and only-subsystem-1-FTB. FTB: finite-time boundedness.
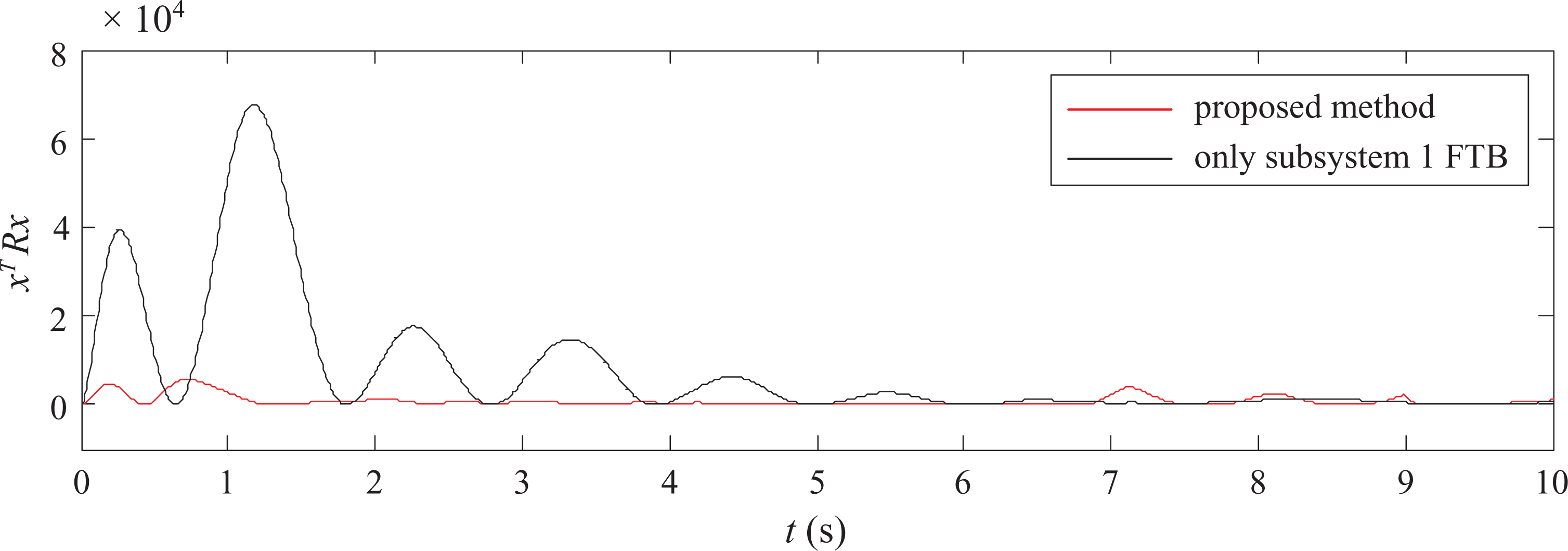
State measure
It can be concluded from Figure 3 that all three controllers can drive the output near to zero in the concerned finite-time interval, which means the small miss distance. However, the minimum one is led by the proposed method. Figure 4 shows the acceleration comparison of the proposed method and only-subsystem-1-FTB. In the simulation results, it is shown that the guidance law designed by the proposed method has better performances in acceleration demanding aspect.
Figures 5 and 6 show that state measures

State measure
Therefore, it can be concluded that, compared with only-subsystem-1-FTB and only-subsystem-2-FTB methods, the proposed method has the minimum miss distance and the acceleration demanding, which means the better system performances in terminal guidance scenario. Meanwhile, the state measure
Conclusion
FTS of switched linear systems with disturbances has been investigated in this article. After extending FTS and FTB definitions to switched linear systems, sufficient conditions guaranteeing system FTB are proposed, by which the state feedback controller designing method can be obtained. These circumstances, which contain the feasibility of LMIs, have then been used in the design context for controller synthesis. For a class of switched terminal guidance systems, the methods can be used to guidance design to solve the FTS problem considering nonzero initial conditions and state constraints. Performance comparisons of the proposed method, only-subsystem-1-FTB method and only-subsystem-2-FTB method, are presented. The results that indicate the proposed methods are suitable to the system with switched dynamics in the finite-time interval.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.