
Abstract
The article deals with the problem of the yaw control of the unmanned aerial vehicle helicopter which is non-affine nonlinear by use of a novel projection-based adaptive fuzzy control approach. First, principle model and control design model of the yaw channel of the unmanned aerial vehicle helicopter are described. Then, a dynamic approximation technique is introduced to approach the non-affine model of the unmanned aerial vehicle helicopter into an affine model with variable parameters, which is applied to facilitate the design of nonlinear control scheme. Next, in the proposed controller, fuzzy controller is designed to deal with the unknown uncertainties and disturbances. Meanwhile, the projection-based adaptive law applied in fuzzy controller bounds the parameter estimation function and can also guarantee the robustness of the designed control scheme against uncertain disturbances. Moreover, the convergence and stability of the designed controller are proved by Lyapunov stability theory. Finally, the simulation results of the yaw channel of an unmanned aerial vehicle helicopter are performed to illustrate that the designed controller has good tracking performance, stability, and robustness under the condition of the time-vary uncertain disturbances.
Keywords
Introduction
An unmanned aerial vehicle helicopter (UAVH) is a kind of autonomous control aircraft, which has significant advantages in the condition of takeoff, hovering, vertical landing, low-altitude flight and multi-attitude flight. 1 In the past decades, UAVHs are widely used in the civilian and military applications, such as power lines inspection, disaster rescue, agricultural, surveillance missions, wildlife monitoring, national defense, and so on, due to their versatility and maneuverability. 2 –5 However, the control of UAVHs is a challenging task, because the dynamics of UAVHs are highly nonlinear, inherently unstable, intensely coupled multivariable. 5 –9 Since the uncertainties of the parameters and model caused by the complicated dynamics of UAVHs affect the control performance, advanced control strategies are applied in the research of UAVHs to improve their reliability, stability, and robustness, which is still a hotspot in the control field.
At present, the flight control technology is mainly divided into two categories: linear control techniques such as proportional–integral–derivative (PID) control, 10 H∞ control, 11,12 and H2 control 13 ; nonlinear control techniques such as fuzzy control, 14 –18 feedback linearization control, 19 backstepping control, 20 –22 sliding model control, 1,4,23 and neural network control. 5,24 –26 Linear control method is very suitable for practical applications, since its design process is simple and the controller is easy to be implemented, which is also the reason for UAVHs dominated by linear control methods. 7 –13,24 However, the linear control techniques cannot guarantee the global approximation of the model, which may lead to an undesirable response and even instability for the tracking control when the system is far from equilibrium point. Compared with linear control technology, nonlinear control techniques can maintain the stabilization of the system in a large scale, which have been researched in the control system of UAVHs. 14 –16,19 –23 However, the nonlinear model of the UAVH is too complicated and generally non-affine, so the practical application of nonlinear controller is still an open and challenging research field. Therefore, the key motivation for this article is not only to simplify the yaw channel model of UAVHs for the nonlinear controller design but also guarantee the basic nonlinear characteristics of UAVHs to ensure the designed controller to be globally stable.
Due to the rapid development of nonlinear control theory, fuzzy control is an effective nonlinear control techniques applied in UAVHs. 14 –17,27 It has been known that the fuzzy control is extremely useful to deal with the problem of uncertainties and unknown disturbances in nonlinear control system. Fuzzy controller is a mathematical system for analyzing the analog input by use of logical variables. 28 In the fuzzy controller, solutions to the control problem can be realized by understandable terms and IF/THEN rules of the controller can be designed by human experience. However, the nonlinear, high order, time variation, and random disturbance of the system will cause the imperfection of the control rule and also influence the control performance, so fuzzy controller is usually combined with other control methods to achieve the optimal control effect, such as fuzzy PID controller, 6 backstepping adaptive fuzzy control, 27 adaptive fuzzy sliding mode control, 16 fuzzy neural network control, 17 a fuzzy adaptive consensus method combined with prescribed performance control, 29 and so on. However, to the best of the authors’ knowledge, the existing controllers are mostly proposed for the linear model system or affine nonlinear model system 30 –32 and general control method cannot control the yaw system well due to the non-affine nonlinearity.
In this article, an adaptive fuzzy controller via projection operator is designed for the yaw channel of the UAVH which is non-affine nonlinear. At the same time, the designed control system can maintain asymptotic stability by the proof of stability using the Lyapunov stability theory. The reminder of the article is organized as follows: the yaw channel of the UAVH and its simplified model are described in section “Model of the yaw channel of the UAVH.” Section “Design of controller for yaw channel” presents a dynamic approximation method to approach the non-affine model of UAVH into an affine nonlinear model and a projection-based adaptive fuzzy controller is designed for tracking desired yaw angle of the UAVH. In section “Simulation results,” simulation results are provided to prove the validity of the designed control scheme. In “Conclusion” section, some conclusions are drawn and future works are given.
Model of the yaw channel of the UAVH
The yaw channel plays a significant part in motion of UAVHs, and the control of a small UAVH is also an extremely complicated problem, 7,8 because the torque of the small UAVHs combined with yaw channel is exceedingly sensitive. So, a more accurate model feature is indispensable to obtain better control performance of yaw channel of UAVHs. In the following paper, a higher fidelity mathematical principle model (PM) is applied specifically for the simulation of the UAVH, and a controller design model (CDM) with reduced complexity is applied for the design of controller and stability analysis.
Principle model
The PM of yaw channel of the UAVH used in this article is referenced by Leishman. 18 The framework of the PM of an UAVH displayed in Figure 1 is built by use of the rigid body motion equation of the UAVH fuselage.
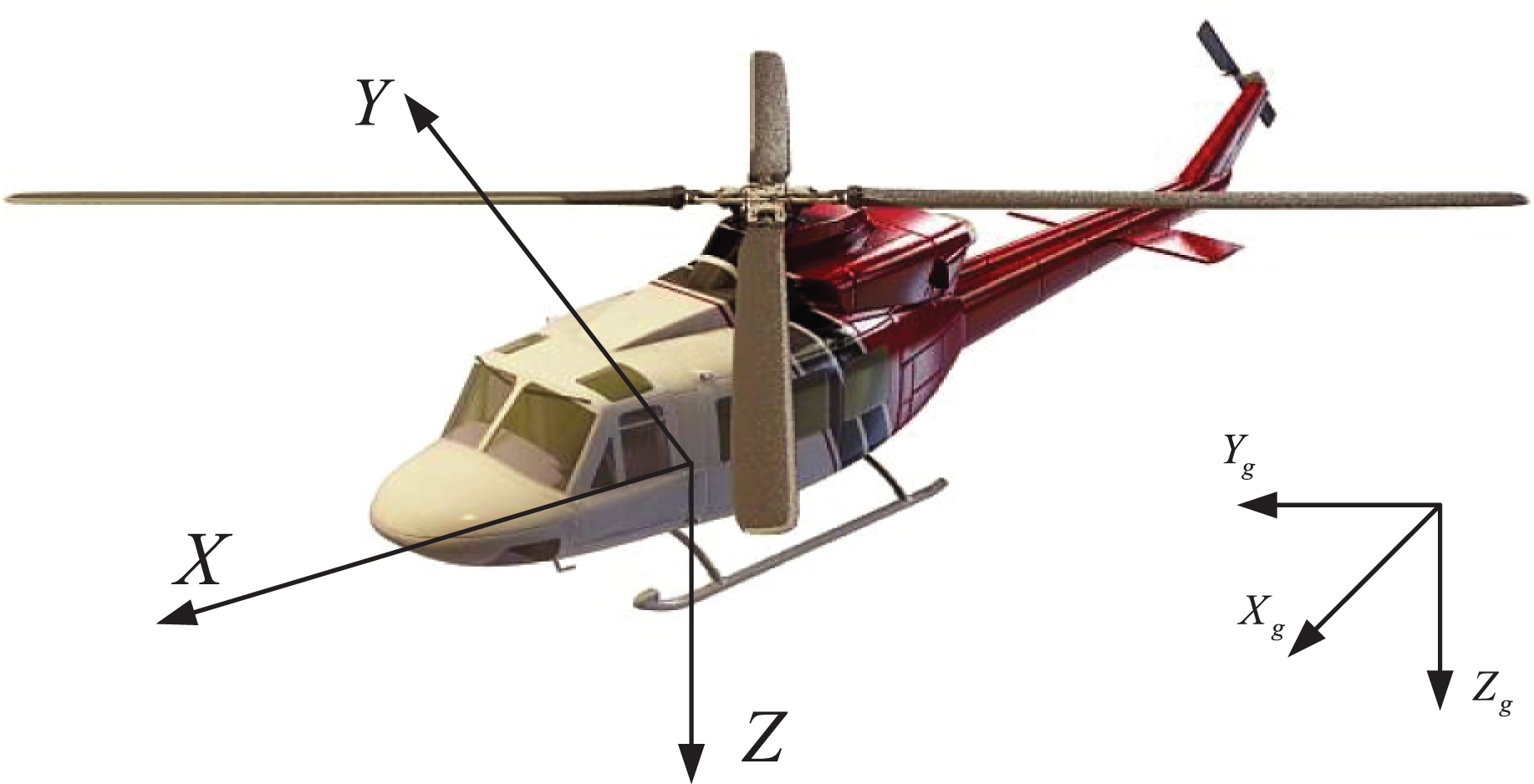
Helicopter and its frame.
The UAVH is subjected to a lot of aerodynamic forces and moments in the normal flight, which can be calculated by summing up all parts of the UAVH including horizontal stabilizer, vertical fin, fuselage, tail rotor, and main rotor. Therefore, the dynamic model of the yaw channel is given by

where θ represents the yaw angle of the UAVH, γ represents angular rate of the UAVH, Izz represents the inertia around z-axis, Nvf represents the torque of the vertical fin, Nhs represents the torque of horizontal, Nfus represents the torque of fuselage, Ntr represents the torque of tail rotor, and Nmr represents the torque of main rotor.
The key forces and torque of the UAVH are determined by tail rotor and main rotor in condition of low speed flight and hovering. 18 Therefore, the rest part of the UAVH can be simplified and the dynamic expression of the yaw channel is reformulated as

where z1 and z2 are damping constants, ltr represents the distance from tail rotor to z-axis, and Ftr represents the thrust of tail rotor.
Then, the torque caused by main rotor can be calculated by use of the blade element method as following

with
And we can calculate the equation (3) by use of the mathematical software Maple 9 as following

with
Similarly, we can describe the force caused by the tail rotor as


Substituting equation (6) into equation (5), we have
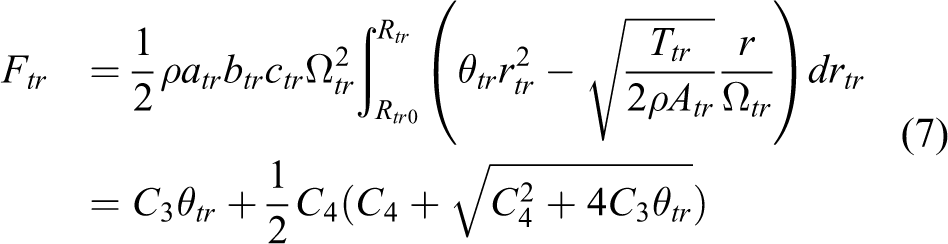
with
Likewise, we can describe the force caused by the main rotor as:

Controller design model
We can clearly find that the coupling relationship exists between tail rotor thrust Ftr and main rotor torque Nmr in PM. Equations (4) and (7) further display that the PM is too hard to be applied for controller design. So, a simplified model that is used for controller design and stability analysis has been established to replace the dynamic equation expressed by equations (4) and (7). Although the result of nonlinear yaw dynamic model of the UAVH is still very complicated, the advantage of this simplified model which preserves the relevant dynamic characteristics of the PM is that it can be analyzed theoretically.
The relationship between θmr and Nmr can be approximated with quadratic polynomial by drawing the pitch angle versus torque. 7

where

where
Combining equations (2), (9), and (10), the non-affine CDM can be calculated as following
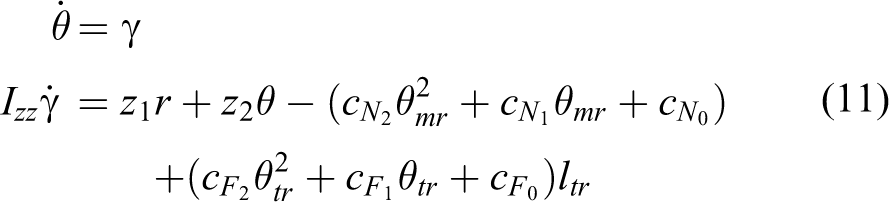
where z1 and z2 are damping constants, and we can learn from the equation (11) that: (1) There are coupling relationships between the tail rotor force and mainly rotor torque. (2) The yaw channel of the UAVH is represented by two-order time-variant system which is nonlinear in the control input. (3) The input nonlinearity mainly determined by the velocity of tail rotor and main rotor and main rotor collective.
Design of controller for yaw channel
In this section, a dynamic approximation approach is designed to approximate the non-affine system of yaw channel of the UAVH into an affine nonlinear form, then fuzzy control scheme is applied to handle the unknown uncertainties and disturbances in the UAVH. By use of the projection-based adaptive law, the parameters estimation function can be bounded, and it can also guarantee the robustness of the controller against the uncertain disturbances. Meanwhile, Lyapunov stability theory is used to prove that the control system can be maintained asymptotically stable.
Non-affine nonlinear approximation
It is an extremely difficult task to control the system with non-affine nonlinear characteristics in the control input vector. 33 Especially in tracking control, the traditional linearization make the system into a time-varying linearized model under the condition of the stabilization only around the stable state point, so it is quite hard for the design of controller to track the desired trajectory accurately. 33 Therefore, a systematic control approach is needed to solve the condition of the nonlinear model with non-affine characteristics, which can make the nonlinear models more appropriate for tracking the desired trajectories accurately.
First, in general, the non-affine nonlinear mathematical model is considered as

where u ∈ ℜ represents the system input vector, y ∈ ℜ represents the system output,
The Taylor expansion for known smooth nonlinear function

where
with
Then, we can rewrite equation (13) as following

where
According to the equation (14), we can find that

From the equation (15), we can draw that
In order to facilitate the following variables and functions,

From the equation (16), we can see that the non-affine nonlinear model is simplified as a time-varying affine model with the global approximation by use of the dynamic approximation technique, meanwhile the tracking problem can be solved by use of the the affine nonlinear control approach.
Adaptive fuzzy controller design
Under normal circumstances,
At first, the fuzzy system
Step 1: For variables
Step 2: Fuzzy system

By use of singleton fuzzifier, the product inference engine and center average defuzzifier, the output of fuzzy system is calculated as

where

where

Similarly, fuzzy system

Then, the tracking error can be defined as

where y is the reference trajectory.
For system (16), according to the fuzzy system (19) and (21), we can design the control law as

where


where
In Figure 2, the entire projection-based adaptive fuzzy tracking controller for the yaw channel of the UAVH is illustrated to obtain a clear idea.

The flow chart of the projection-based adaptive fuzzy controller for the yaw channel of the UAVH. UAVH: unmanned aerial vehicle helicopter.
Stability analysis
The proof of stabilization of designed projection-based adaptive fuzzy controller is achieved by use of the Lyapunov function with the state tracking errors (equation (22)) and adaptive parameter estimation errors, which can be deduced as the following three steps:
Step 1: According to equations (23) and (22), state variable

From equations (16) and (26), the closed loop dynamic equation of fuzzy control system can be written as

Then, for the need of the the Lyapunov stability theory, we can reformulate the dynamic equation (27) as the vector form


Step 2: We define the minimum approximation error as

where


where

Substituting equations (19) and (21) into equation (30), we can compute the closed loop dynamic equation as

The equation (31) clearly describes the relationship between the adaptive parameters
Step 3: Design the Lyapunov function as

where γ1 and γ2 are positive and P is a positive definite matrix which meets the following Lyapunov function:

where Q is an arbitrary
According to the equations (31) and (32), the

Substituting adaptive law (24) and (25) into (34) leads to:

Using the property 1A of the projection operator (see the appendix 1 for details), we can obtain that


Then, according to the above analysis, we can get

Since
Simulation results
In this part, simulations results are used to demonstrate the validity of the designed nonlinear projection-based adaptive fuzzy tracking controller for the yaw channel of an UAVH. First, the PM for simulation is achieved from the helicopter platform referenced by Zhao and Han. 7
The parameters of nonlinear yaw channel model of an UAVH are summarized as following

with
Then, the initial conditions are
Next, the control law of yaw dynamics of the UAVH is given by

where, as for

The membership function of the fuzzy controller.
Finally, the following two cases are simulated to demonstrate the robustness of the designed controller for the yaw channel of the UAVH. In these simulations, the unknown uncertain disturbance is designed to change as a function of time, that is

Case 1: Proposed adaptive fuzzy control scheme (AFCS) is used in the step yaw signal tracking.
The tracking command of

Then, a filter which is
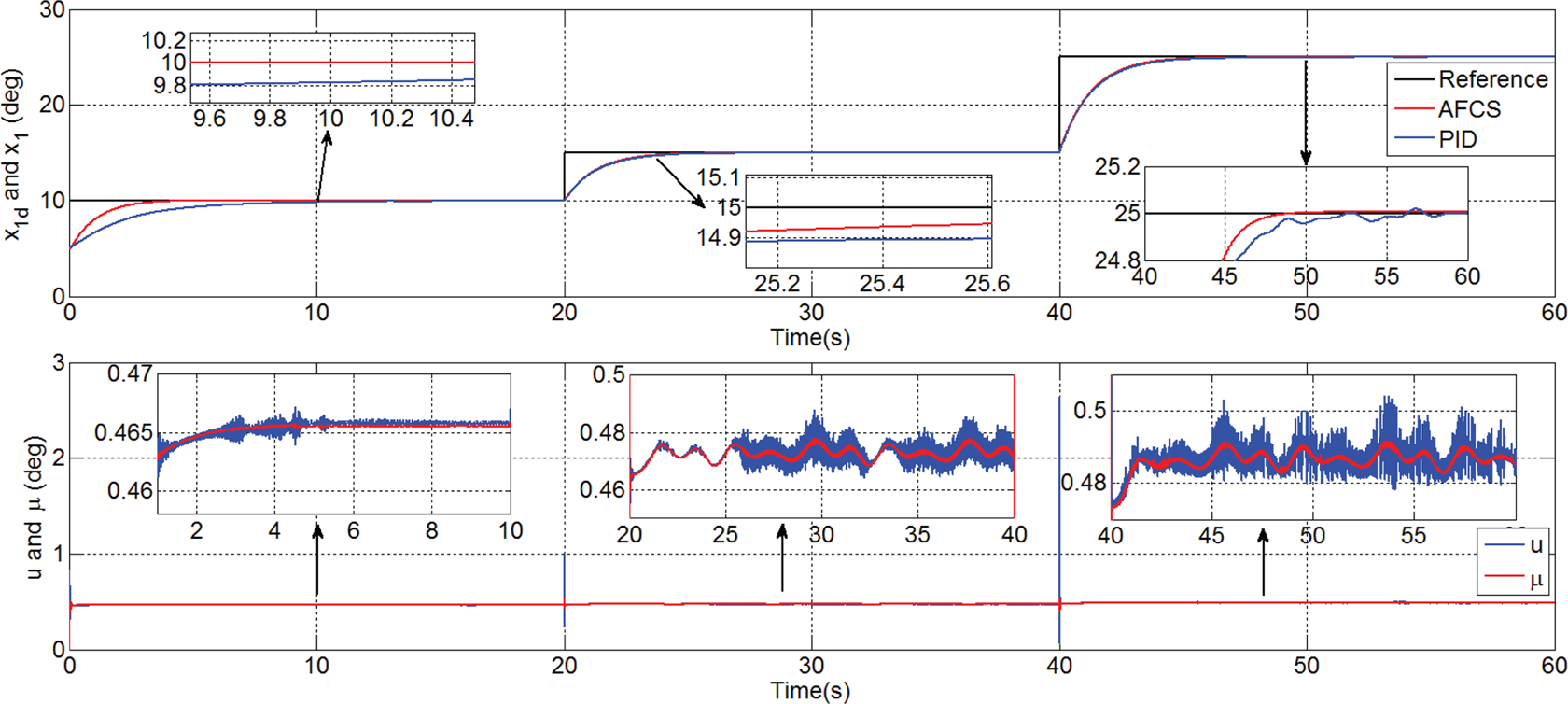
System step response with the AFCS under the condition of the time-varying disturbance compared with PID controllers. AFCS: adaptive fuzzy control scheme; PID: proportional–integral–derivative.
Fuzzy system
Case 2: Proposed AFCS is used in the sinusoidal yaw signal tracking.
The tracking command of
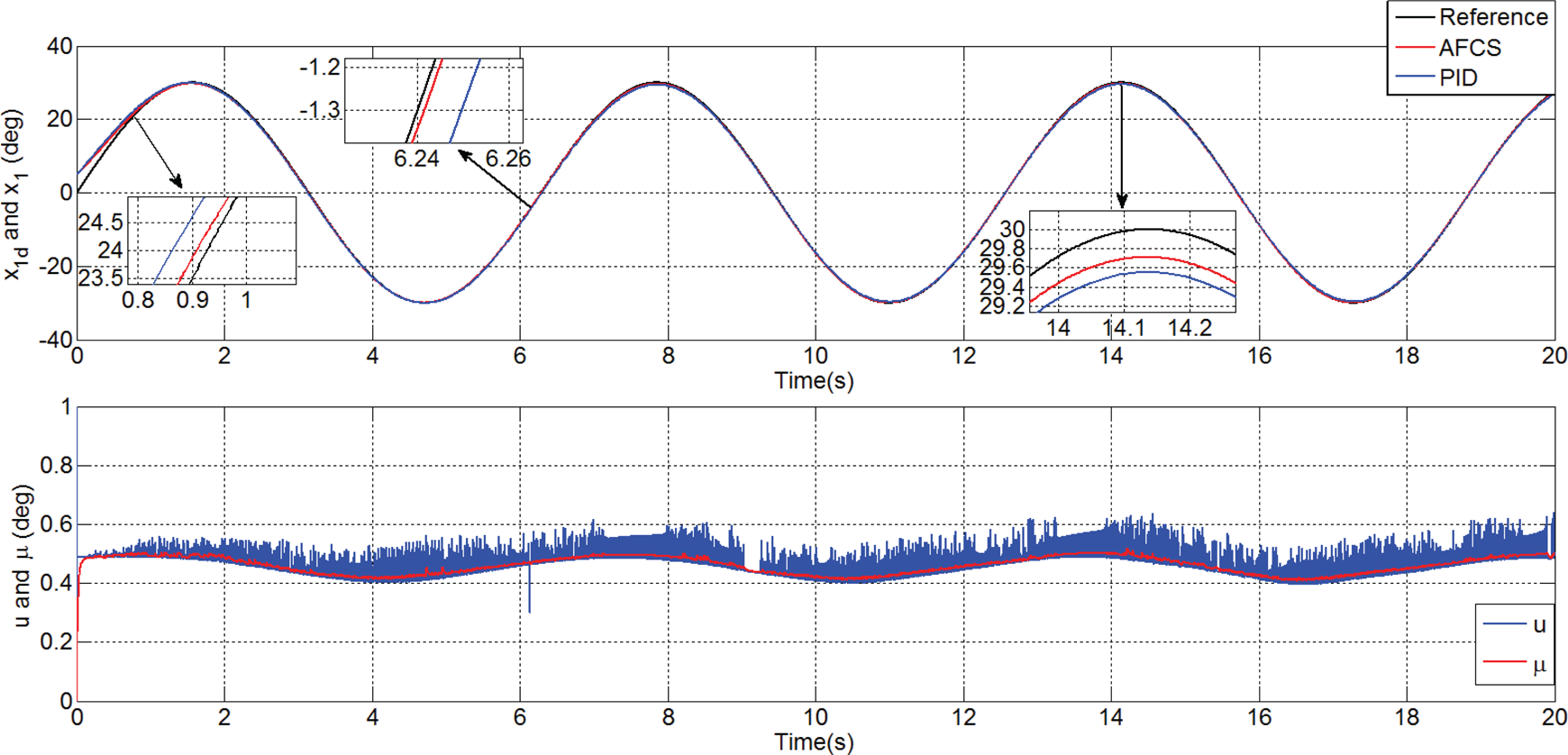
System sinusoidal response with the AFCS under the condition of the time-varying disturbance compared with PID controller. AFCS: adaptive fuzzy control scheme; PID: proportional–integral–derivative.

Fuzzy system
Conclusion
A systematic study is carried out for the yaw channel of the UAVH in this article. First, since the yaw channel of the UAVH is non-affine, a dynamic approximation method is developed to approach the non-affine system into an affine nonlinear form. Then, fuzzy control scheme is designed to handle the unknown uncertainties and disturbances in the yaw channel. By use of the projection-based adaptive law, the free parameters estimated function in the fuzzy control scheme can be bounded, and it can also guarantee the robustness of the controller against the uncertain disturbances. Remarkably, the proposed projection-based adaptive fuzzy controller is useful when the explicit model of the UAVH is hard to obtain. Finally, simulation results are illustrated to proved that proposed projection-based AFCS can maintain the progressive tracking of the output for the closed-loop control system of the UAVH and have satisfactory control performance in the case of the unknown uncertainties and time-varying disturbances. Nevertheless, there is a chattering phenomenon in the control u, which may be caused by the selection of fuzzy rule base. Therefore, the solution to solve the chattering phenomenon and supplementary of input and output constraints are our future works.
Footnotes
Appendix 1
The smoothened projection operator 34 is applied in this article to bound the parameter estimation equation. The projection operator is very helpful for robust adaptive controller that needs multiple derivative of adaptive law. Below, we describe the main definition and property from. 34
Definition 1. Parameter estimation vector q which belongs to a convex compact set is defined as following
where θmax represents the norm bound of parameter vector θ. Then, for any obtained
where ∇ represents the gradient vector of
where ε represents an arbitrary positive.
The main property of the projection operator 34 is given as following
Property 1. If we choose the initial value
Then
For any
Acknowledgment
The authors sincerely thank the editor and all the anonymous reviewers for their valuable comments and suggestions.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (61503156, 61403161, and 51405198) and the Fundamental Research Funds for the Central Universities (JUSRP11562 and NJ20150011).