
Abstract
This article proposes a novel advanced differential evolution method which combines the differential evolution with the modified back-propagation algorithm. This new proposed approach is applied to train an adaptive enhanced neural model for approximating the inverse model of the industrial robot arm. Experimental results demonstrate that the proposed modeling procedure using the new identification approach obtains better convergence and more precision than the traditional back-propagation method or the lonely differential evolution approach. Furthermore, the inverse model of the industrial robot arm using the adaptive enhanced neural model performs outstanding results.
Keywords
Introduction
According to recent studies, the differential evolution (DE) algorithm is promising for identifying and controlling nonlinear dynamic system. The first study on DE algorithm is introduced by Storn and Price. 1 Because DE technique possesses several advantages such as simple implementation, good performance, global optimization, and low space complexity, it is one of the most powerful stochastic population-based optimization algorithms. Ilonen et al. 2 applied the DE algorithm to train feed-forward neural model. This study used DE to find the global optimum for the objective function. In comparison to gradient descent method, we see that DE technique can be applied efficiently for learning neural-based models. The DE-trained neural networks for nonlinear dynamic system identification are introduced in the literatures 3–5 The DE-based trained neural models for controlling nonlinear dynamic systems are presented in the studies by Chen and Yang and Lu et al. 6,7
Anh and Nam 8 proposed a robot manipulator identification method using a neural multiple-input and multiple-output (MIMO) nonlinear autoregressive exogenous model (NARX) model based on BP algorithm. This study uses BP algorithm to optimally produce the weighting values of neural model. Simulation results demonstrate that the identification of quality based on the proposed neural model and trained by BP algorithm performed well. Alavandar and Nigam 9 presented the inverse model of the robot arm identification using an adaptive neuro-fuzzy inference system (ANFIS) model. The BP algorithm is used to train the ANFIS model. The identification process based on the experimental training data of inverse kinematics solution and mean squared error (MSE) criterion. The disadvantage of these results relates to the fact that identification process is sometimes trapped in local optimum solution.
Bandurski and Kwedlo 10 introduced a new way to train neural model using the combination of DE technique with a specific gradient descent approach. The steps of mutation and recombination, in each iteration, produce a new agent. This novel agent is adaptively trained by the gradient descent approach before being transferred to the next iteration. The results prove that the proposed algorithm has better selection than the DE or other gradient descent methods. Based on the above analysis, we see that the multilayer perceptron neural networks (MLPNNs) are usually trained by the gradient descent methods (such as BP algorithm, Levenberg Marquardt algorithm). But, these training algorithms achieve the slow convergence speed and the objective function may lead to local minima.
In this article, a new adaptive neural MIMO NARX model was proposed based on an advanced DE (advanced differential evolution (ADE)-AMNM) for inverse model of the three degree of freedom (3-DOF) industrial robot arm identification. This new advanced DE approach links between the DE with the modified back-propagation (MBP) algorithm which is applied to optimally produce the weighting values of neural model. This new advanced method realizes quicker convergence and better accuracy than the traditional BP algorithm or the lonely DE algorithm. So, the proposed adaptive neural MIMO NARX model using the advanced DE algorithm (ADE-AMNM) for inverse kinematics of the robot arm identification approach successfully modeled and performed well.
This article is structured as follows. Section “The inverse model of the 3-DOF industrial robot manipulator” presented the inverse model of the 3-DOF industrial robot arm. Section “An advanced adaptive neural model for nonlinear MIMO system identification” presents the proposed adaptive neural network model for nonlinear system identification. Section “Modeling and identification results” presented identification results. Final section is the conclusion.
The inverse model of the 3-DOF industrial robot manipulator
In general, there are two alternatives, one is to consider the dynamic model 11,12 of the robotic arm and the other is to use the inverse kinematics. The inverse kinematics plays an important role for robot control implementation. The inverse model helps to calculate the needed joint angles from reference trajectory of the end effector. There are various methods to calculate the inverse kinematics results, for example, the algebraic and the geometric method. This article applies the algebraic method to determine the inverse model of the 3-DOF industrial robot arm presented in Figure 1.

The investigated 3-DOF industrial robot arm. 3-DOF: three degree of freedom.
Using the D-H procedure, we obtain the transformation matrices

Therefore, the forward kinematics for a 3-link robot manipulator is given by

Where, S1, C1, S2, C2, S23, and C23 represent
A point P represents a given position of the end effector, which can be expressed by

For the typical position solution of the 3-DOF industrial robot arm, the inherent relation of the joint angles θ1, θ2, and θ3 will be presented. First, (2) and (3) are multiplied by S1 and C1, respectively


Then,

Therefore, the necessary result to the joint variable θ1 is determined by


Second, in order to calculate θ3, equations (2) and (3) are multiplied by C1 and S1, respectively


Then

Also, equation (4) can be written as follows

From equations (10), (11), (12) and (13), we obtain

Therefore, the necessary result to the joint variable θ3 is determined by


Finally, in order to find θ2, equations (12) and (13) can be written as:


It is clear that
Hence, there will be four different solutions available for the inverse model of the 3-DOF industrial robot arm. In this study, the elbow up set and the shoulder wrist not flipped structure are applied. Then, the inverse model of the investigated 3-DOF robot arm is calculated with


In summary, the inverse kinematics helps to calculate the needed joint angles
Specific parameters of the 3-DOF industrial robot arm.

3-DOF: three degree of freedom.
An advanced adaptive neural model for nonlinear MIMO system identification
Now, an advanced adaptive neural model (ADE-AMNM) is used to identify the nonlinear system. The AMNM structure is implemented by linking the three-layer MLPNN structure and the ARX model. The AMNM structure has many strongly approximating characteristics of the MLPNN structure and powerful predictive feature of the ARX structure. The block diagram of the proposed AMNM structure is described in Figure 2.

Block diagram of nonlinear MIMO system identification based on an adaptive neural model. MIMO: multiple-input and multiple-output.
In Figure 2,
To assess the data and identify a model, first, a discrete-time ARX (autoregression with exogenous input) model which performs a relationship between u(t) and y(t) was created. The estimation of the ARX model is the most efficient prediction method. In other words, the ARX model always satisfies the global minimum of the cost function. The ARX model structure with noise input is depicted as follows

Where, e(t) is the white noise measurement, na is the past outputs used for determining the prediction, nb is the past inputs used for determining the prediction, and nk is a time delay (usually 1).
If we let



Substituting expression θ, A(q), and B(q) in (22), (23) and (24) into equation (21), we obtain

The discrete ARX model in domain z (with the time delay nk = 1) is depicted as

Next, we introduce about the MLPNN. The MLPNN structure is a feed-forward artificial neural network which includes many multilayers perceptron. Figure 3 shows a typical three-layer perceptron neural network structure with n neurons of the input layer, q and m neurons in the hidden and the output layers, respectively.

Structure of three-layer perceptron neural network.
Based on the studies by Rubio and Bordignon and Gomide, 13,14 as illustrated in Figure 3, the prediction output is computed as follows

where v and w are weights of hidden layer and output layer, respectively, f is a sigmoid activation function of the hidden layer and F is a linear activation function of the output layer.
The weights θ is an alternative for the weights matrix of v and w. We denote

The goal of learning process is to fix a mapping between the learning data ZN and the weights θ of the AMNM structure

So that the AMNM produces the prediction output

The weights θ are determined as follows

There are many differential methods to train the AMNM structure. This article uses the modified MBP algorithm, the DE technique, and the novel advanced DE technique to train the AMNM for approximating the nonlinear dynamic MIMO system. This training method is applied to optimally produce the weighting values θ of AMNM. In the training process, the weights θ are adaptively modified to choose a functional mapping available. The adaptation can be determined by minimizing the objective function EN
which is depicted in equation (30). The prediction output
Adaptive MIMO neural model optimized by back-propagation algorithm
The back-propagation (BP) algorithm is the most popular learning algorithm. It included two steps to transmit the information. The first, the input signal u(t) is transmitted from input layer to output layer of the AMNM structure to create the output signal
We must select the learning rate η > 0, the maximum of MSE E
max, and create training data ZN
, which include K sample
We assign MSE E = 0, variable k = 1, and randomly generated the weights of the AMNM









The flowchart of BP algorithm trained an adaptive MIMO neural model is presented in Figure 4.

Flowchart of BP algorithm trained an adaptive MIMO neural model. BP: back-propagation; MIMO: multiple-input and multiple-output.
Adaptive neural model optimized by ADE approach
The DE technique is initially appeared as a technical report by Storn and Price in 1995. It is one of the most popular and powerful stochastic population based-optimization algorithms in current use. Like other evolutionary algorithms, 15,16 DE strategy and programming can be implemented in Figures 5 and 6.

Main stages of the DE algorithm. DE: differential evolution.

Flowchart of DE method trained an adaptive MIMO neural model. DE: differential evolution; MIMO: multiple-input and multiple-output.
Firstly, it needs to choose the dimension of population (NP), the amount of maximal generation G
max, the mutation rate F, the crossover factor C, and the lower and upper limits for each parameter.
Produce an initialized population par hazard with NP D-sized vectors


where D represents the amount of weighting values of the AMNM, i denotes an index to the population, and G denotes the number of iterations.
Estimate all individuals. If the fitness result of each individual responds to the predefined criteria, keeping this result and STOP. On the contrary, go to step 4.

Produce a mutant vector through using mutant operator to every individual as follows

with
Create a test vector through relinking the destination vector with the mutant one as follows

Choose between the trial one and the destination vector as follows

Adaptive neural model optimized by advanced DE algorithm
System identification using adaptive neural model optimized with MBP method has been regarded as an appropriate approach due to its approximating capability and its identification ability of nonlinear MIMO system. But, the identification process using BP algorithm is sometime trapped in local optimum result. On the other hand, DE technique is recognized as strong global robust optimization with rather low precision. Hence by linking the DE and the MBP algorithm, a novel ADE method is proposed which possesses strong advantages of both DE and MBP algorithm.
There were various methods for using the local search (LS)-based MBP technique inside the global optimization using the ADE approach. In this study, proposed MBP method is used in each test vector—create test vector by linking the destination vector with the mutant one—to create a LS test vector before leaping to step selection procedure. The proposed scheme ADE is summarized in Figure 7.

Flowchart of proposed ADE algorithm trained an adaptive neural model. ADE: advanced differential evolution.
Modeling and identification results
In this article, the inverse model of the 3-DOF industrial robot arm is investigated. The inverse kinematics is based on kinematics equation of robot to find joint angles

Block diagram of the inverse kinematics identification using the AMNM structure.
In general, the procedure of identifying a nonlinear dynamic MIMO system includes four steps as illustrated in Figure 9.

Main stages of the system identification.
The training data is recorded by the experimental input–output data. This data is determined from the inverse kinematics of the three-link robot manipulator. Where the input values

Collecting input–output data of the 3-DOF industrial robot arm. 3-DOF: three degree of freedom.
The training data includes a set of input signals

After running the model in Figure 10, we have input and output signals of the industrial robot manipulator as Figure 11. Where e(t) is a white noise measurement.

Input–output signal of the 3-DOF industrial robot arm. 3-DOF: three degree of freedom.
After having the training data ZN, the suitable model structure is selected by determining the best networks structure through the given regression as input. This study applies the proposed AMNM model as Regressive vector Predictive vector


with ϕ(t) represents the regression vector, θ denotes the weights vector, and g represents the function operated through the neural model.
Based on Figure 8, we see that the proposed AMNM structure is created by a fully connected 3-layer feed-forward MLPNN with six inputs, q hidden neurons and three outputs units. Based on the number of hidden layer neuron and training methods, we determine the best result of weights θ.
At this step, we solve the optimization problem to find the model parameters by minimizing the objective function EN . This article uses a BP algorithm, a DE algorithm, and a new hybrid DE algorithm to determine the optimally weights θ.
Thus, the AMNM is estimated or determined the structure of the regression vector.
This step aims to verify the neural network applying input data sets not used in the evaluating process. 17 The error is once more calculated as abovementioned. If it responds to an appropriate limit, then the investigated network has favorably generalized and can be applied in practice for other real system. The proposed AMNM model is considered to possess the capability of generalization when the input–output relationship collected from the network is approximately correct for input–output patterns never used in the learning process of the investigated model. 18,19
An adaptive neural model (AMNM) optimized by an advanced DE algorithm
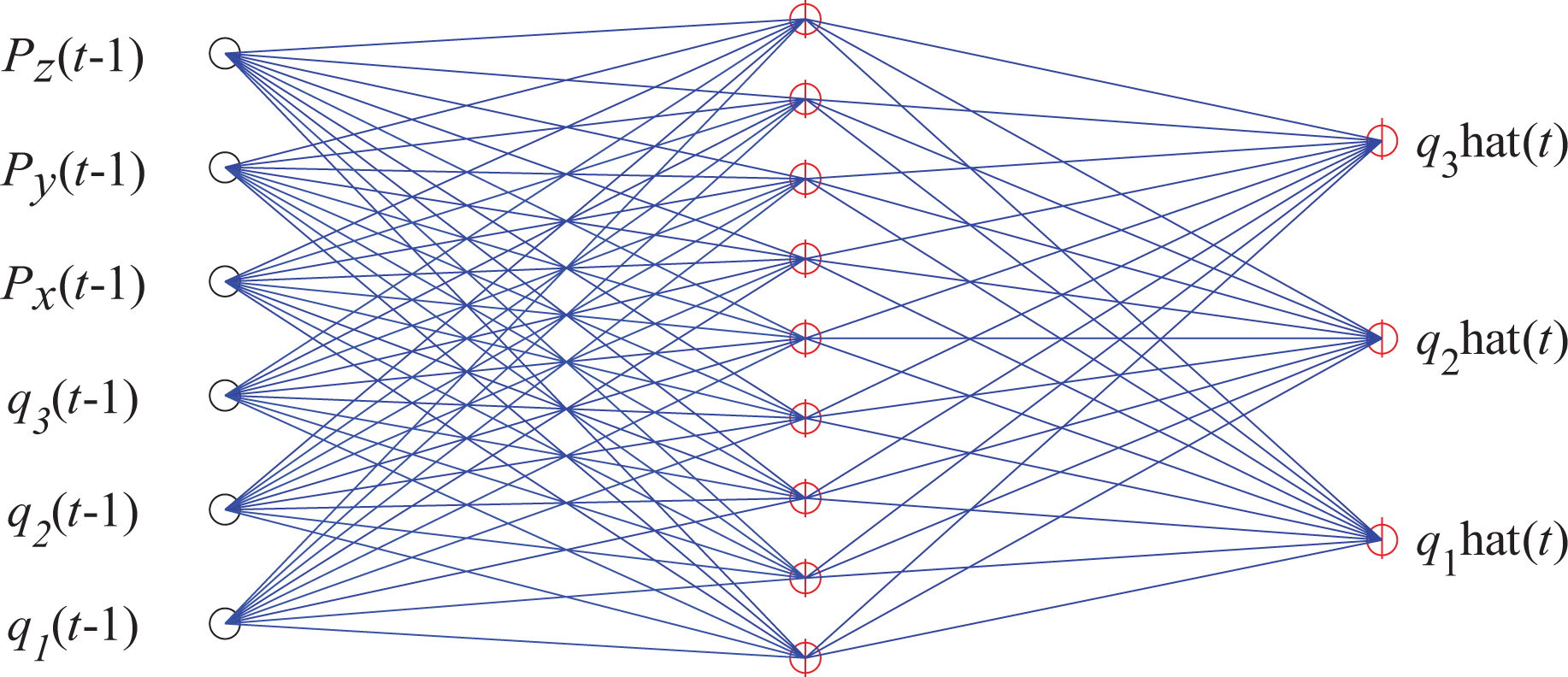
First, we selected a number of generations and a number of LS’ iterations to study the performance identification of the AMNM optimized by the proposed ADE algorithm. The AMNM structure with six inputs, five hidden neurons, and three outputs is depicted in Figure 12. Table 2 gives the proposed ADE parameters applied in simulation.

The AMNM structure with five hidden neurons.
Proposed ADE variables applied in simulation.
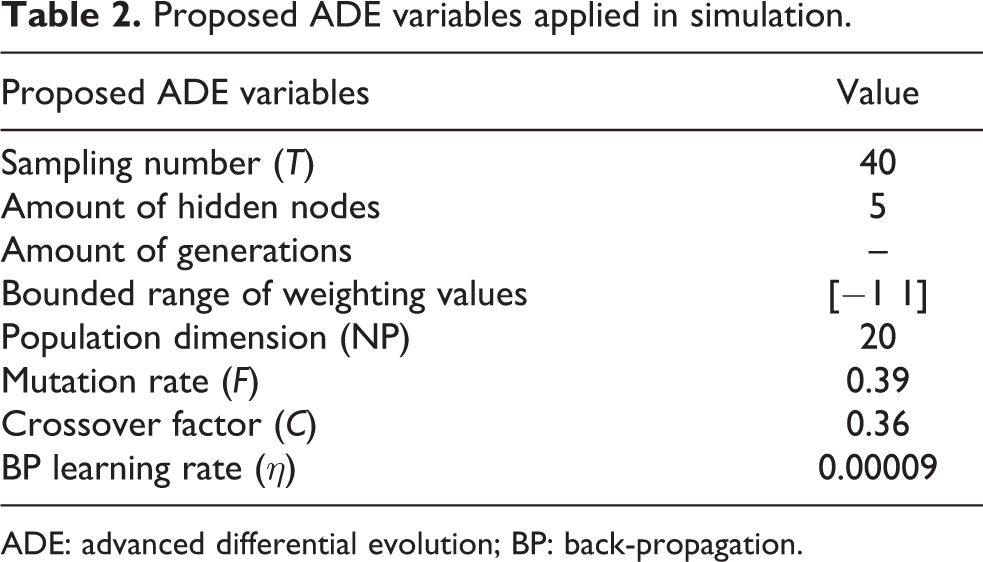
ADE: advanced differential evolution; BP: back-propagation.
Figure 13 shows the fitness convergence of inverse kinematics result of the 3-DOF industrial robot arm using the AMNM model-based hybrid differential evolution (HDE) algorithm. Here, a number of generations are 500 GEN and a number of LS’ iterations is changed from 10 up to 150. Table 3 gives the performance identification in term of time’s convergence and MSE.
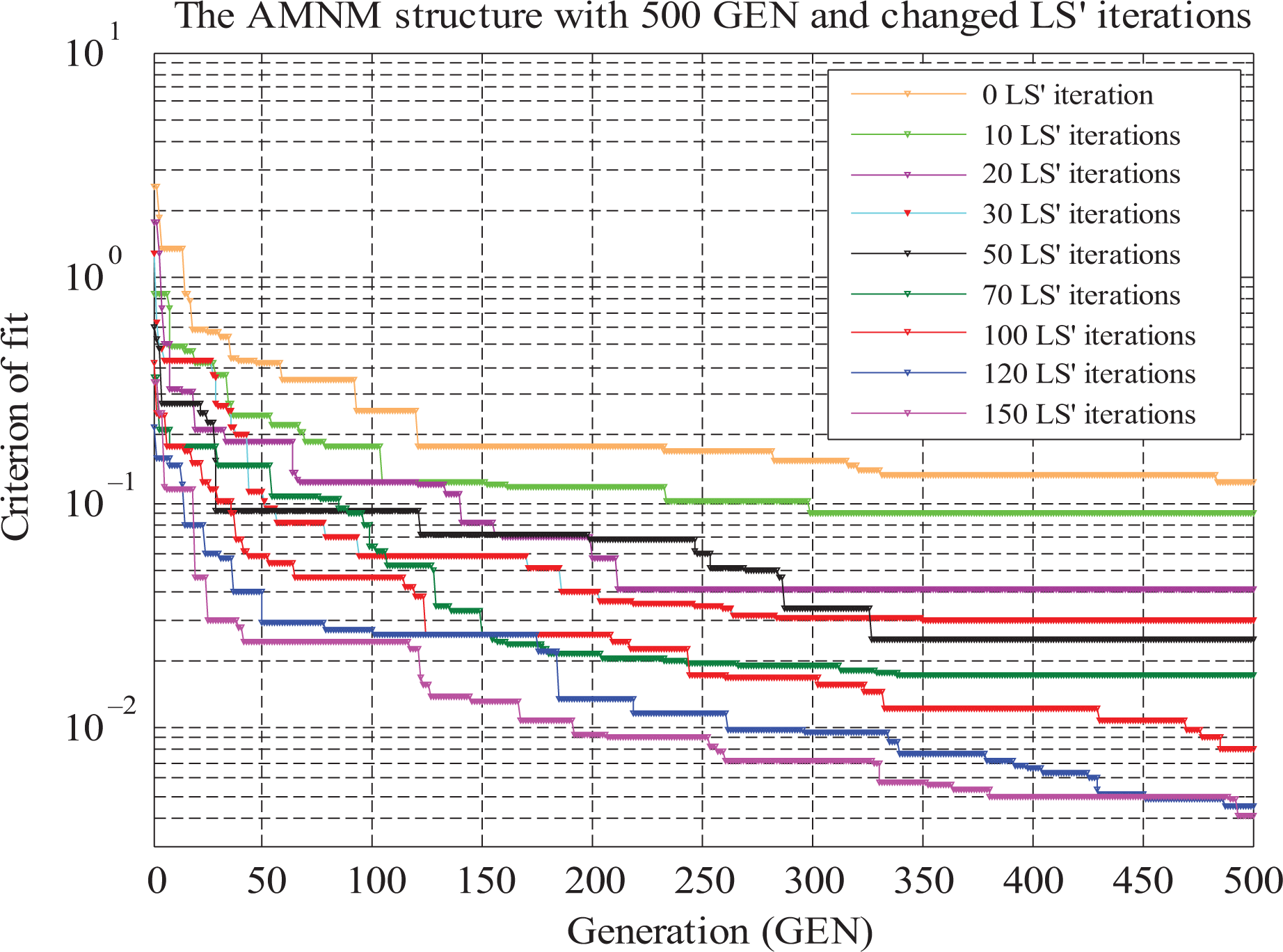
The fitness convergence of inverse kinematics solution using the AMNM with 500GEN. GEN: generation.
The performance identification using the AMNM 500GEN.

LS: local search; MSE: mean squared error.
Figure 14 shows the fitness convergence of inverse model solution of the 3-DOF industrial robot arm using the AMNM model-based ADE algorithm. Here, a number of generations are 750 GEN and a number of LS’ iterations is changed from 10 to 120 (namely, the AMNM 750GEN). Table 4 gives the performance identification in term of time’s convergence and MSE.

The fitness convergence of inverse kinematics solution using the AMNM 750GEN. GEN: generation.
The performance of identification procedure using the AMNM 750GEN.

LS: local search; MSE: mean squared error.
Continually, Figure 15 shows the fitness convergence of inverse model solution of the 3-DOF industrial robot arm using the AMNM structure-based ADE algorithm. Here, a number of generations are 1500 GEN and a number of LS’ iterations is changed from 10 to 120 (namely the AMNM 1500 GEN). Table 5 gives the identification performance in term of time’s convergence and MSE.

The fitness convergence of inverse kinematics solution using the AMNM 1500GEN. GEN: generation.
The performance of identification process using the AMNM 1500GEN.
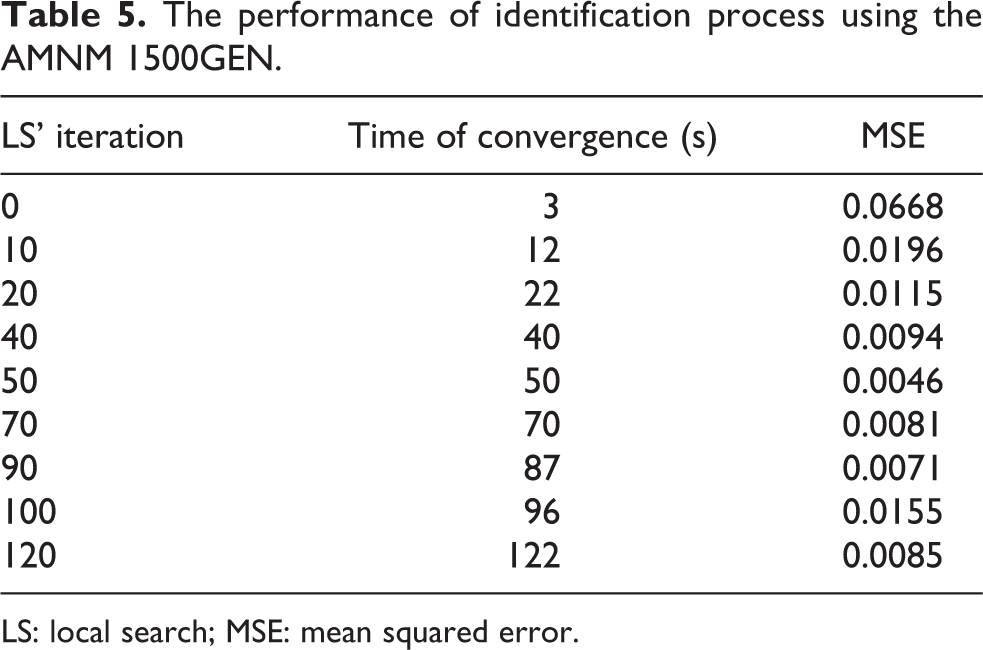
LS: local search; MSE: mean squared error.
Forwardly, Figure 16 introduces the fitness convergence of inverse model solution of the 3-DOF industrial robot arm using the AMNM structure-based ADE algorithm. Here, a number of generations are 3000 GEN and a number of LS’ iterations is changed from 10 to 100 (namely, the AMNM 3000GEN). Table 6 gives the identification performance in term of time’s convergence and MSE.
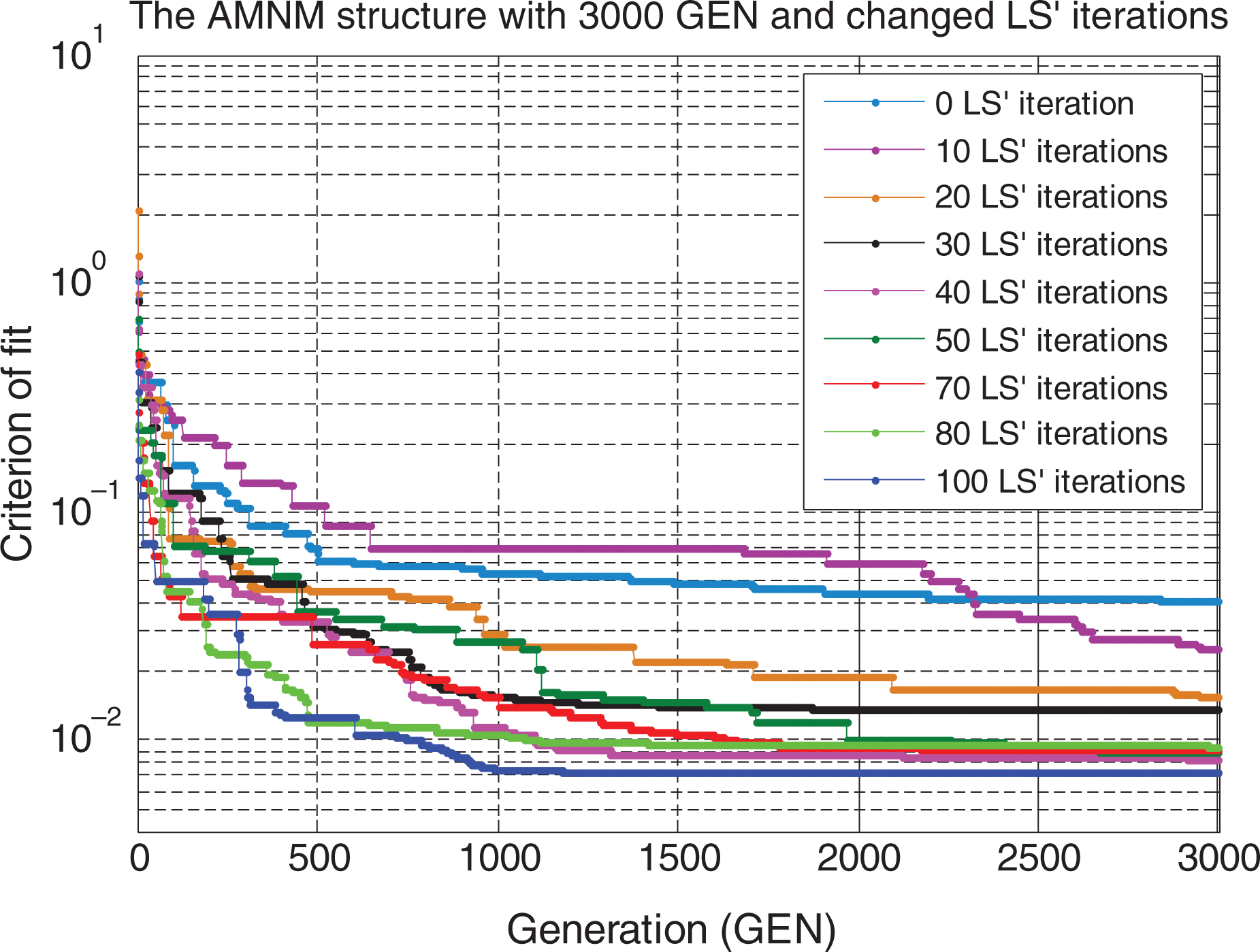
The fitness convergence of inverse kinematics solution using the AMNM 3000GEN. GEN: generation.
The performance of identification process using the AMNM 3000GEN.

LS: local search; MSE: mean squared error.
Based on these results, we see that the performance of inverse model solution of the 3-DOF industrial robot arm depends on a number of ADE’ generations and a number of LS’ iterations as well. A case of AMNM structure with five hidden layer neurons, 750 GEN and 120 LS’ iteration giving the best MSE value (MSE = 0.0040) and the best time of convergence 56 s which eventually represents the most suitable identification performance.
Next, we change a number of hidden layer neurons to study the performance identification of the proposed the AMNM optimized by ADE technique. 20,21 The AMNM model composes of six inputs and three outputs. The number of hidden neurons is changed between 4 and 10. Other parameters include 750 GEN and 120 LS’ iterations which are applied. The AMNM structure with six inputs, four hidden neurons, and three outputs is depicted in Figure 17. The AMNM structure with six inputs, nine hidden neurons, and three outputs is figured in Figure 18.

The AMNM structure with four hidden neurons.
The AMNM structure with nine hidden neurons.
Figure 19 shows the fitness convergence of inverse model solution of the 3-DOF industrial robot arm using the AMNM structure-based ADE algorithm. Here, a number of hidden neurons is changed between 4 and 10. Table 7 gives the performance identification in term of time’s convergence and MSE.

Comparison on fitness convergence of AMNM when changing number of hidden neurons.
The identification performance with changed amount of hidden nodes.

LS: local search; MSE: mean squared error.
From the results, it is clear that when we increase the number of hidden layer neurons, the time of convergence increases significantly but the performance of identifying industrial robot manipulator doesn’t change in the same way. The fact is that the sample of AMNM structure with five hidden layer neurons obtains the best MSE value (MSE = 0.0041) in comparison to other samples (with time of convergence 56 s). Eventually, it is concluded that the proposed AMNM structure with five hidden layer neurons optimized with novel ADE identification method keeps the most suitable identification performance.
In summary, the performance of inverse model solution of the 3-DOF industrial robot arm depends on the proposed AMNM structure and ADE’s parameters. The best identified AMNM structure composes of six inputs, five hidden nodes, and three outputs, meanwhile ADE’ variables include NP = 15, F = 0.39, C = 0.36, GEN = 750, and LS’ iterations = 120 which give the most suitable identification performance.
Comparison on the performance identification between BP, DE, and HDE algorithm
To assess the quality of the inverse model solution for the 3-DOF industrial robot arm based on the AMNM structure optimized by a new advanced ADE technique, we should make comparison with traditional methods such as BP and DE algorithms. 22,23,24
Figure 20 shows the comparison results of the identification quality of inverse model solution for the 3-DOF industrial robot arm using the AMNM structure which is trained and optimally minimized by BP, DE, and ADE algorithms. Figure 21 presents the comparative results on fitness convergence of inverse model solution for the 3-DOF industrial robot arm based on the AMNM structure-based MBP, DE, and proposed ADE algorithm. Table 8 gives the performance of identification process in term of time’s convergence and MSE.

Comparative study on the identification quality using the AMNM-based BP, DE, and ADE. ADE: advanced differential evolution; BP: back-propagation; DE: differential evolution.

Comparison on the fitness convergence for three methods.
The identification performance based on the new AMNM optimized by MBP, DE, and proposed ADE.

DE: differential evolution; ADE: advanced differential evolution; BP: back-propagation; MBP: modified back-propagation; MSE: mean squared error.
Based on the results above, we see that the inverse model solution of a 3-DOF industrial robot arm using the AMNM structure optimized by a new advanced ADE method obtains a quicker convergence and a better accuracy than the traditional BP technique or the lonely DE method.
Conclusion
This article introduces a new method using an adaptive neural MIMO model (AMNM) combined with a new ADE for the modeling and identification the inverse model of the 3-DOF industrial robot arm. By combining the DE and MBP algorithm, the novel advanced method successfully contains the advantages of both local and global search. The simulation and experiment studies demonstrated that the proposed ADE technique obtained a quicker convergence and a better accuracy than all other identification methods. Hence, this new ADE trained neural network has been regarded as a powerful method in nonlinear multivariable system identification.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This article was fully supported by the National Foundation for Science and Technology Development (Vietnam), under grant number MDT: 107.01-2015.23, Vietnam, and the Vietnam National University-Ho Chi Minh City (Vietnam) under grant number B2016-20-03.