
Abstract
This article aims to develop observer-based linear parameter varying output feedback H∞ tracking controller for hypersonic vehicles. Due to the complexity of an original nonlinear model of the hypersonic vehicle dynamics, a slow–fast loop linear parameter varying polytopic model is introduced for system stability analysis and controller design. Then, a state observer is developed by linear parameter varying technique in order to estimate the unmeasured att
Introduction
National Aeronautics and Space Administration and the US Air Force have focused on the research of hypersonic vehicles for many years because of their military and commercial applications. Among various hypersonic vehicle research programs, the air-breathing hypersonic vehicle (AHV) is a kind of aircraft which is widely studied in the world. It can fly with the speed of 5 Ma to 10 Ma for long times and distances. 1 Especially, the scramjet-powered AHV is also proposed as a possible way of making space access more affordable and delivering a quick response to global threats, because the scramjet is a more efficient propulsion system for flight within the atmosphere than a rocket. 2 However, the research of srcamjet-powered vehicles was stopped and continued in the early 1990s with Hyper-X project within the National Aerospace Plane. 3
The critical problem existing in the hypersonic vehicle is guidance, navigation, and various control methods. 4 However, the control design problem for the scramjet-powered AHV is still a challenging task due to the inherent strong couplings and nonlinear disturbance. Conventionally, linear control techniques are used to design linear controller for many hypersonic vehicles, for example, guaranteed cost control, 5 fault-tolerant tracking control, 6 linear quadratic regulator control, 7 and so on. In these results, the first step need to do is to develop a linear model for the complex nonlinear hypersonic vehicle system by linearized method. However, the obtained linear model cannot capture the nonlinear dynamics of hypersonic vehicle, hence, linear control technique may not result in desirable controller when aircrafts encounter disturbances and large parameter uncertainties. In later studies on this subject, some typical nonlinear control techniques, such as sliding mode control, 8 back-stepping control, 9 adaptive control, 10 composite predictive control, 11 and nonlinear disturbance observer-based robust control, 12 have been widely investigated.
Recently, linear parameter varying (LPV) system is a bridge between nonlinear systems and linear systems, which has important research significance. LPV control method is applied to all kinds of complex nonlinear systems. 13 –16 Also, many important LPV control techniques have been acquired for hypersonic vehicles. In the study by Lind, 17 an LPV framework is used to represent structural nonlinear dynamics of a kind of hypersonic vehicle. Then, a robust gain-scheduled controller is synthesized to guarantee closed-loop H∞ control performance. In the study by Cai et al., 18 the authors developed an LPV model for the AHV. Within LPV framework, a self-scheduled controller is designed in order to realize stable tracking. Especially, under considering flexibility effects, a gain scheduling controller is developed for a kind of flexible AHV in the study by Ge et al. 19 However, the state information cannot be obtained directly in many practical nonlinear complex systems. Therefore, a kind of robust output feedback control method is presented for a nonlinear model of an AHV in the study by Sigthorsson et al. 20 Using only limited state information, the developed controller can realize excellent tracking responses. In the study by Li et al., 21 an output feedback controller combining with neural network theory and high gain observer method is developed for a generic hypersonic vehicle. More recently, in the study by Zong et al., 22 a generic hypersonic vehicle tracking control problem is investigated via dynamic output feedback control technique, which consists of a nonlinear observer and a back-stepping controller.
In this article, the objective is to develop an LPV H∞ tracking controller for the hypersonic vehicle system based on LPV state observer. First, a polytopic simplified LPV model is adapted to design attitude tracking controller. Next, based on the polytopic LPV model, a slow loop LPV H∞ output feedback tracking controller is constructed. The tracking controller gain is given by Linear Matrix Inequality (LMI) constraints which can be efficiently solved by standard software packages. The LPV H∞ controller can guarantee that LPV closed-loop hypersonic vehicle system is globally asymptotically stable. Finally, the control performances of the presented attitude tracking controller is illustrated by numerical simulation.
LPV model of the hypersonic vehicle
The hypersonic vehicle nonlinear attitude control model in entry phase can be described as follows 23












In equations (1) to (12), x, y, and z are positions of the hypersonic vehicle in earth coordinate system; V is velocity; χ; is flight path azimuth angle; ϒ; is flight path angle; α; is angle of attack; β; is sideslip angle; μ; is bank angle; and p, q, and r are pith, roll, and yaw rate, respectively. For more details about the nonlinear model, we can refer to the study by Huang et al. 24
The hypersonic vehicle attitude control model can be written as the follow slow loop and fast loop polytopic LPV systems. 24 –26
where slow loop state vector
In this artitio, reference model (14) is considered:

where
For system tracking error

where x(t) is state vector, Q is positive definite weighting matrix, γ; is prescribed attenuation level, and
Now, we design the following LPV observer in order to estimate unmeasured state of the slow loop system (13).

Define the observer error as follows

By differentiating equation (17), we have

In this article, the following slow loop LPV controller is considered.

Therefore, the augmented system can be described as

where
Based on eqaution (20), the modified slow loop H∞ performance can be described as follows

where
Our control objective is to develop slow loop LPV output controller (19), which guarantees the slow loop LPV system (22) to be asymptotically stable and also satisfies the modified H∞ performance (21).

Observer-based LPV H∞ controller design
In this session, first, in order to design the LPV H∞ controller, we give the following useful result.
Theorem 1
If there exists a symmetric positive definite matrix

Proof
For the the modified slow loop H∞ performance (21), we have

By theorem 1, if inequality (21) holds, we get

Then, we give the Lyapunov function candidate (26).

By differentiating equation (26), we have
Therefore, we can obtain
Theorem 2
For a prescribed attenuation level γ2, there exists an observer-based LPV H∞ tracking controller, which makes the closed-loop LPV system (22) H∞ tracking control performance (21) is guaranteed, if there exists a symmetric positive definite matrix U and Wj such that LMIs (28) hold
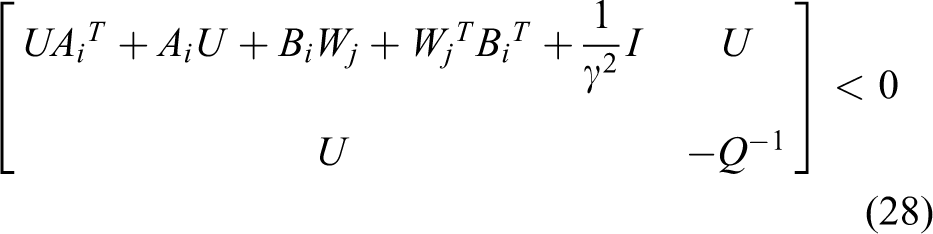
Then, the observer-based LPV controller H∞ tracking controller can be obtain by the following form

Proof
Define

where
Substituting equation (30) and
where





With

where




By formula (32), it implies that

Now, pre-multiplying and post-multiplying the inequality (33) by

Inequality (34) is equivalent to linear matrix inequality (35) using Schur complement.

Denote
Remark 2
There are no effective algorithms for solving inequality (32) but we can obtain matrices
Numerical simulations
The hypersonic vehicle system parameters are given as
In this article, step signals are used to output attitude angle tracking commands. Also, the step tracking commands will pass second-order filters (36).
where damping ratio
Figures 1 to 3 illustrate attitude angle H∞ tracking response curves for the slow loop system. Also, attitude angle tracking errors are given in Figure 4, and Figures 5 –7 present fast-loop pitch rate, roll rate, and yaw rate response curves. More specifically, control torques are shown in Figure 8. From the above simulation results, the presented observer-based LPV H∞ control method has excellent tracking performance.

Slow loop angle of attack tracking.

Slow loop angle of sideslip tracking.

Slow loop bank angle tracking.

Slow loop attitude angle tracking error.

Fast loop pitch rate response.

Fast loop roll rate response.

Fast loop yaw rate response.

Control torques.
Conclusion
In this article, an observer-based LPV H∞ control method has been addressed for the problem of a hypersonic vehicle attitude tracking control. A polytopic LPV model of the hypersonic vehicle is adopted for designing tracking controller due to complex couplings and nonlinear disturbance. An LPV state observer is used to estimate slow loop attitude angles due to the fact that the hypersonic vehicle state cannot be obtain directly. Applying the estimated system state, slow loop LPV H∞ tracking controllers are designed, which satisfy the global stability and the given H∞ tracking control performance for the closed-loop LPV system. The gain matrix of the resulting controller can be obtained by standard software packages. Simulation results illustrate that the presented control method achieves good attitude angle tracking control performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China [grant number 61304127] and the Natural Science Foundation of Anhui Province [grant number 1308085QF120].