
Abstract
In this article, an adaptive backstepping control is proposed for multi-input and multi-output nonlinear underwater glider systems. The developed method is established on the basis of the state-space equations, which are simplified from the full glider dynamics through reasonable assumptions. The roll angle, pitch angle, and velocity of the vehicle are considered as control objects, a Lyapunov function consisting of the tracking error of the state vectors is established. According to Lyapunov stability theory, the adaptive control laws are derived to ensure the tracking errors asymptotically converge to zero. The proposed nonlinear MIMO adaptive backstepping control (ABC) scheme is tested to control an underwater glider in saw-tooth motion, spiral motion, and multimode motion. The linear quadratic regular (LQR) control scheme is described and evaluated with the ABC for the motion control problems. The results demonstrate that both control strategies provide similar levels of robustness while using the proposed ABC scheme leads to the more smooth control efforts with less oscillatory behavior.
Introduction
Underwater gliders are increasingly being used to operate in dynamic and complex ocean environments. Trajectory tracking control is one of the most essential features required to ensure reliable and robust operation of a glider in such environments. Currently most of the operational gliders 1 –3 have implemented a simple proportional controller for heading or pitch control, but the cooperation of multiple actuators has limited the energy efficiency and control accuracy. On the other hand, single-objective control is no longer applicable to the increasing complex glider mission. Therefore it is important to develop advanced adaptive controllers to ensure the security and reliability of the underwater glider system.
Control for underwater gliders is a topic that has been widely researched in recent years. Existing controllers are typically designed to reach a desired pitch angle, velocity, or specified depth. A variety of approaches have been developed and applied to the attitude control problem. These include sliding mode control (SMC), 4 linear quadratic regular (LQR) control, 5 predictive control 6 and adaptive control. 7,8 Maziyah et al. 9 compared the proportional–integral–derivative (PID) controller and LQR controller, the results showed that the LQR controller has better performance but still needs further improvement to obtain a faster response. In predictive control, 10 a decoupled adaptive control based on the linear glider model predictive is provided. In adaptive control, 11 –13 the control system is capable of self-learning and adapting to the variations of the vehicle dynamics and hydrodynamic coefficients. There are also other existing approaches, such as fuzzy control, 14,15 and inverse system control. 16 In addition, Mahony 17 and Allotta 18 considered the attitude control in presence of magnetic disturbances in the underwater environment.
One of the common drawbacks of conventional control methods is that they are based either on the linearized model of the glider dynamics 19 or the steady state solutions of the dynamic equilibrium, 20 which can be applied in the saw-tooth motion of the glider and single-input-single-output (SISO) control in spiral motion. However, when a glider operates in six degrees of freedom (6-DOFs), multiple-input-multiple-output (MIMO) control 21 is required. Another limitation of the existing state of the art strategies is that the analytical steady solutions in spiral motion are extremely difficult to obtain, 22 which might lead to the deviation between the desired signal and output results.
Based on the above research results, a nonlinear MIMO adaptive backstepping control (ABC) of an underwater glider system is proposed in this article. Preliminary work on this line of research, relating a SISO control scheme for a glider in saw-tooth motion has already been presented by Cao et al. 23 As an extension, the controller proposed in this article is designed based on the nonlinear glider dynamics in 6-DOFs, with multiple control objects in the design process. Then the adaptive backstepping method was used to approach a stable Lyapunov function with global asymptotic stability, thereby the actual multiple control laws of the dynamic system are obtained. With respect to the state-of-art of similar control systems, the proposed MIMO ABC avoids solving the steady-state motion equations and it is capable of achieving anticipated multimode motion.
The rest of the article is organized as follows. The glider dynamics in 6-DOFs are established in Section ‘Problem formulation’. Then the MIMO ABC controller designing process is introduced in Section ‘Controller design’. The simulation results and discussions will be drawn in Section ‘Simulation results’. The final section concludes the article.
Problem formulation
The glider dynamic model used in this study is adopted from existing work.
24
Since either the expressions or the expansions of the equations of the motion in 6-DOFs are tedious and complex, they will not be expressed in this study. Instead, the state-space equations will be established through reasonable simplification of the glider dynamics. The definitions of parameters and coefficients appeared in this study are listed in Table 1. Three coordinate frames are commonly used to describe the motion of underwater vehicles
25
: inertial frame, body frame and flow frame. The body frame
Definitions of variables appearing in glider motion.


Coordinate frames of the glider motion.
The simplification process is based on the following assumptions:
Define the state vector

Therefore, the state-space equations of the glider system can be described by












Controller design
This section proposes a nonlinear adaptive backstepping control law to steer the glider towards the desired output vector, and an LQR controller is introduced to compare with the proposed method.
LQR controller design
LQR is a method in modern control theory that uses state-space equations to analyze the system. The standard optimal principle is to produce a stabilizing control law that minimizes a cost function J, which is weighted by the quadratic sum of the states and input variables. 26 By determining the feedback gain matrix, the trade-off between the control effort, the magnitude, and the response can be established, which will guarantee the stability of the system. The cost function to be minimized is defined as

where
To design the LQR controller, the state-space equations of the glider must be linearized as follows

where


here
The corresponding control law is

where
The flow chart of the LQR controller is illustrated in Figure 2. The steady states are obtained through the equilibrium solver; then the time-varying control inputs can be calculated by the linearized matrix and the LQR controller. An important issue is that when the glider performs in steady spiral motion, the equilibrium states are difficult to predict. Viewing the existing steady-solutions, 27 –29 the approximated numerical solution does not match the analytic result; on the other hand, the method of numerical solution is an iterative searching process, which requires a large amount of calculations. In addition, when the glider operates in complex situations, the LQR controller is unable to adapt with time varying desired path.

Flow chart of the LQR controller.
Adaptive backstepping controller design
To overcome the aforementioned difficulties in multimode control, an adaptive backstepping controller is presented in this section. The basic principle of the backstepping approach is to design a Lyapunov function reversely by applying the Lyapunov stability theory. The ultimate goal is to find a Lyapunov function whose derivative is nonpositive, so that the system reaches global asymptotic stability. ABC is usually used in a nonlinear SISO system; however, for a MIMO system, establishing the proper Lyapunov function is extremely challenging.
The control laws are designed as follows


where















Step 1
Define












where μi is the estimated value, and zi is the tracking error between the state value and its estimated value (or desired value). Establish the Lyapunov function of the glider system as

The objective is to find the proper control vector u, which makes the derivative of V nonpositive

Step 2
Considering equation (8), let

where ci is a constant value, similarly hereinafter. The expression of z12 can be obtained

Take a derivative of equation (36) on both sides

In equation (37),

Substituting equation (38) into equation (37), the expression of u3 is obtained (equation (20)).
Step 3
Then consider equation (3), assume

Take derivative of the equation on both sides

Assume

Therefore, the expression of z10 is obtained

Again, assume

and take derivative of z10, the linear equation with two control inputs is obtained

Step 4
Using the same procedure as with equation (4), the expression of z6 can be obtained

where

Therefore, the expression of z11 is obtained

Again, assume

and take a derivative of z11, the linear equation with two control inputs is obtained

Step 5
In equations (44) and (49), the control inputs u1 and u2 are the only two unknown variables, while U1 and U2 are related to u3 (see from the explanation for equation (19)). Consider u3 as a known parameter, and by solving these two joining equations, the final control laws of u1 and u2 can be obtained.
Note that the final control law

Finally, the Lyapunov function of the glider system is obtained


It is obvious that if the proper coefficients
Simulation results
To illustrate that the proposed control method is applicable to a glider system, a simulation study was carried out based on the Seawing glider,
20
whose mechanical properties are:

Hydrodynamic coefficients of the Seawing glider.

and the parameters in LQR controller is selected as follows

These LQR parameters are developed from existing work 5 , minor changes have been made by trial and error to adapt the difference of parameters in the glider model.
Case 1: saw-tooth motion
First of all, the saw-tooth motion scenario is considered, assume the desired saw-tooth path is:


where ξ = θ − α is the gliding path angle.
Figure 3 presents the pitch angle (a) and velocity (b) of the glider in saw-tooth motion with an ABC and a LQR controller, respectively. Analyzing the tracking error data, the absolute errors converge to 0 in both controllers. It can be observed that in Figure 3(a), the two controllers almost reach the steady state simultaneously. In velocity control, the LQR controller has a faster response with obvious overshoot at the switching stage; while the velocity with ABC changes smoothly to the desired value.
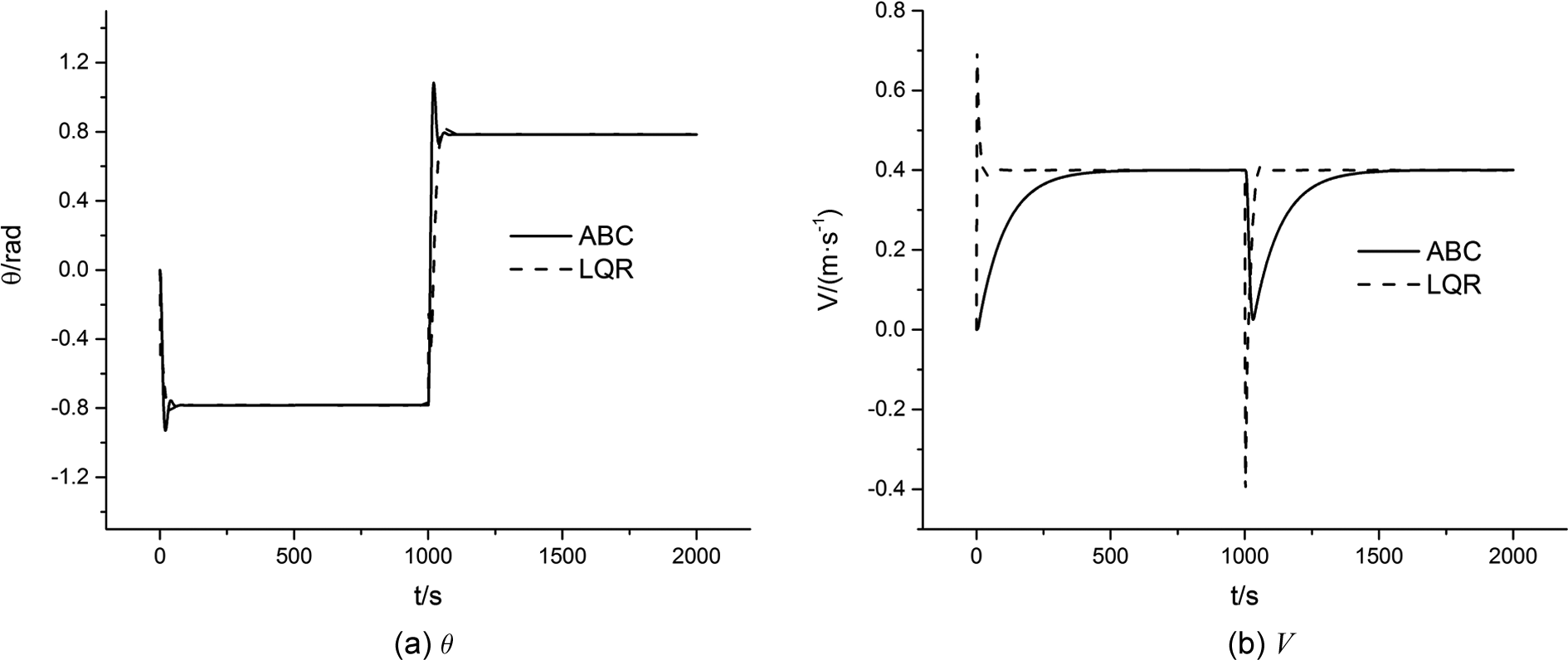
Simulated outputs of the saw-tooth motion.
The corresponding control inputs of the saw-tooth motion are illustrated in Figure 4, including the linear actuator rp1 in Figure 4(a) and ballast mass mb in Figure 4(b). The difference can be barely observed in rp1, but the two controllers perform significantly differently in mb. The LQR controller acts a fast response at the initial state of simulation, with an overshoot of 36.3%; at the switching stage, the overshoot increases to 89.7%. However, in mb control, the ABC presents a smooth approach to the equilibrium value, without overshoots and vibrations. LQR has more overshoot, while ABC is much slower. The overshoots of the actuator will lead to additional energy consumption, which is of crucial importance in a realistic glider mission. Therefore, the ABC shows a better energy saving capability compared with the LQR in saw-tooth motion.

Simulated control inputs of the saw-tooth motion.
Case 2: spiral motion
Besides saw-tooth motion, underwater gliders can perform another steady motion, which has a trajectory as a spiral. Choose the desired path



where Rd is desired turning radius, which is related with the other state values

Figure 5 presents the path angle (a), heading angle (b), and velocity (c) of the glider in spiral motion with an ABC and a LQR controller. In Figure 5(a), the LQR controller reaches the desired value in a short period of time, but the tracking error still exists (0.01869 rad); the ABC overshoots the desired value by 92.6%, nevertheless, the tracking error is eliminated slowly. More distinct comparisons of the tracking ability can be observed in Figure 5(c), the ABC reaches the desired value smoothly without tracking error and overshoots; while the LQR controller has a fast converge speed at the initial stage, but the ultimate tracking error remains at 0.0275 m/s. In Figure 5(b), both the tracking error of the ABC and LQR controller exists because the heading angle ξ is not a constant. As can be seen from Figure 5(b), it is admitted that the ABC controller output is further away from the desired angle and seems not converging. However this is compensated by the fact that ABC scheme leads to less energy consumption as revealed from Figure 6. By comparing the control inputs, it is observed that the curves of the ABC scheme are more smooth compared with those of the LQR scheme, which indicates that using the ABC scheme leads to less oscillatory behavior of control efforts, and consequently leads to less energy consumption.

Simulation results of spiral motion. (a) ξ. (b) ψ. (c) V.

Simulated control inputs of the steady spiral motion
The trajectories of the desired path and simulation results are illustrated in Figure 7. It is obvious that the ABC path maintains a certain distance from the desired path in steady motion, while the LQR path deviates from the desired path from the beginning of the motion. In fact, the simulation turning radius of the ABC is R = 199.7 m, while the turning radius of the LQR is R = 183.1 m. The horizontal position along with operating depth is illustrated in Figure 8, the position with ABC follows the desired value with a certain deviation, while the tracking error with LQR increases along with the depth. In general, although the tracking error of trajectory in the motion still exists, the three control objects in spiral (R, V, and ξ) have been successfully tracked using the proposed method.

Trajectories of the desired path and simulation results in spiral motion.

Horizontal position versus depth in spiral motion.
Case 3: multimode motion
In an actual mission, a glider is usually required to complete complicated motion that combines saw-tooth motion and spiral motion. Define the multimode motion



Figure 9 presents the pitch angle Figure 9(a), heading angle Figure 9(b), and velocity Figure 9(c) of the glider in multimode motion with an ABC. The motion consists of saw-tooth motion, spiral motion, turning motion, 30 velocity change, and path angle change. Although the motion is complicated, the tracking error barely exists in the pitch angle and velocity control no matter how the desired value changes. In the heading angle control, the tracking error converges to zero in spiral motion and turn motion. While in steady spiral motion, the tracking error of the actual heading angle exists, it is because the desired heading angle is time-variable, the simulation result is always in the approaching situation. That is because conventional underwater gliders do not have propulsion systems, the yaw motion is actuated through the rotation of an internal mass (mp), which is much smaller than the vehicle hull mass (mh). Another important factor is caused by the geometry shape of the vehicle, the glider has a relatively large added inertia term in yaw motion (see Table 2). These two factors lead to poor maneuverability of a glider, and the heading angle is always chasing the desired value.
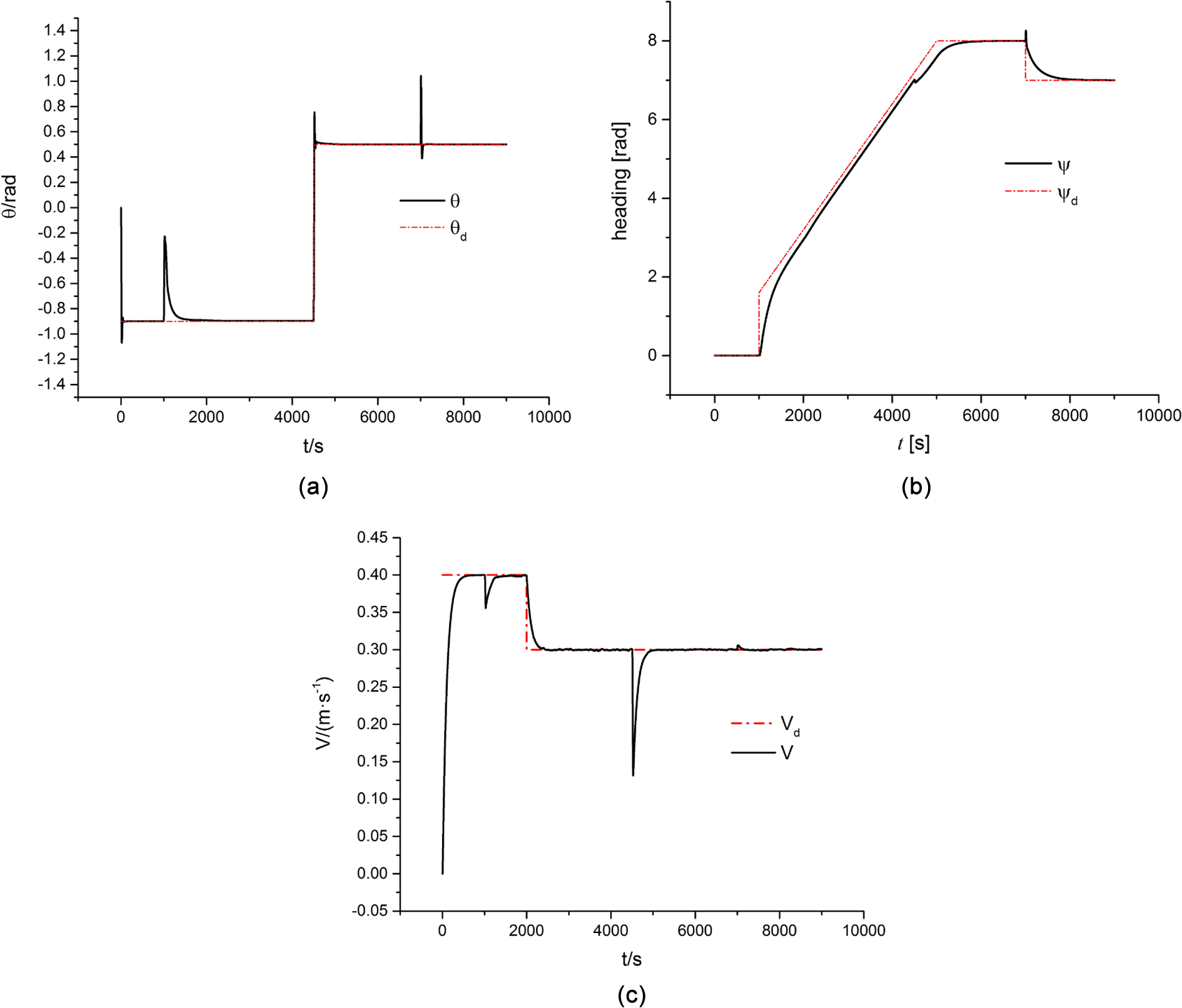
Simulation results of multimode motion with ABC. (a) θ. (b) ψ. (c) V.
The trajectories of the desired path and simulation results are illustrated in Figure 10. The simulation result coincides with the desired path at the beginning and ending stages, nevertheless significant tracking error can be observed during the spiral motion stage. The work presented in this paper primarily focuses on the attitude and velocity control, previous work has been done on studying the control strategies that drive the vehicle to the desired planned trajectories, 31,32 we believe the tracking error displayed in Figure 10 can be improved by taking use of those previous works to implement the path following control methods.
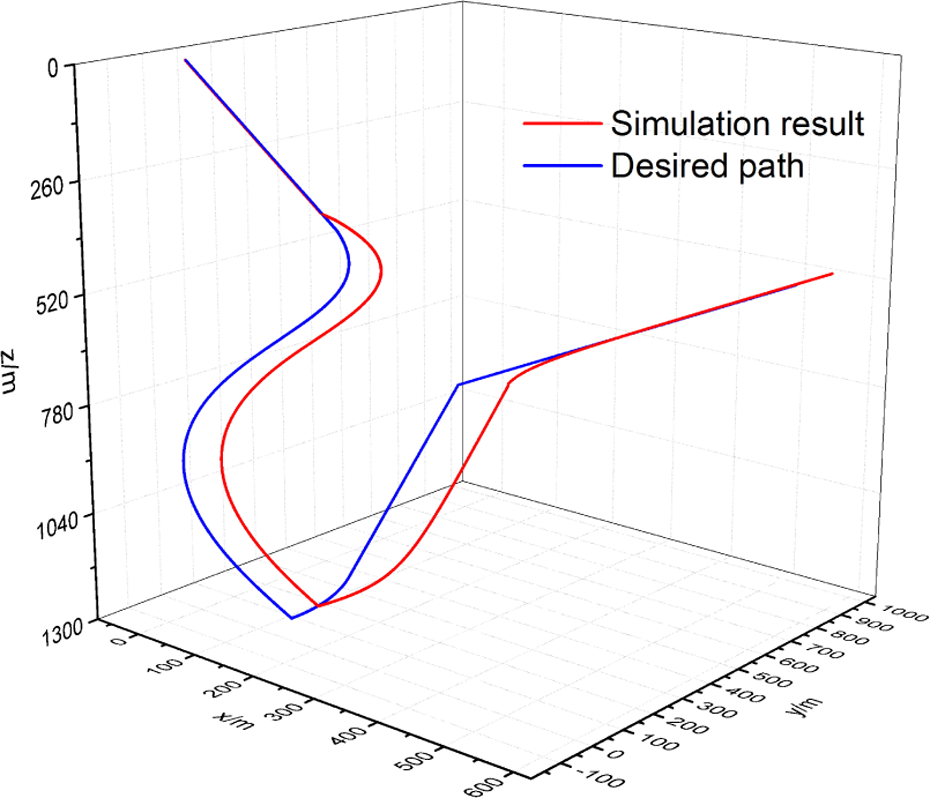
Trajectories of the desired path and simulation results in multimode motion.
Conclusion
This article presented a new approach for nonlinear MIMO control of underwater glider systems. The method is established at the basis of the state-space equations, which are simplified from the full glider dynamics through reasonable assumptions. A Lyapunov function consisting of the tracking error of roll angle, pitch angle, and velocity of the vehicle is established. The adaptive control laws are derived according to Lyapunov stability theory, to ensure the tracking errors asymptotically converges to zero. Theoretical proof and simulation experiments by comparing with a LQR controller demonstrated that the proposed method is effective to deal with basic glider motions and complicated multimode motion.
Viewing the path tracking ability of the proposed method, the next stage in this work is to further develop the strategy into path following control, and run the techniques on a real glider operating in the ocean. Actually, the authors have already developed an underwater glider named after Seagull, 33 which will be applied for an ocean test in the near future. Another extension of this work is to develop an on-line planning scheme 34 –37 that can be incorporated into a glider’s guidance system to allow it to regenerate the trajectory during the course of the mission. 38,39
Footnotes
Author’s Note
Zheng Zeng is also affiliated to China Institute of Oceanology, Shanghai Jiao Tong University, China and Qingdao Collaborative Innovation Center of Marine Science and Technology, China.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported by the National Natural Science Foundation of China (NSFC) (grant number 51279107 & 41527901) and the Research Fund for Science and Technology Commission of Shanghai Municipality (STCSM) (grant number 13dz1204600).