This article proposes an adaptive multivariable higher-order sliding mode control for the longitudinal model of an air-breathing vehicle under system uncertainties and actuator failures. Firstly, a fast finite-time control law is designed for a chain of integrators. Secondly, based on the input/output feedback linearization technique, the system uncertainty and external disturbances are modeled as additive certainty and the actuator failures are modeled as multiplicative uncertainty. By using the proposed fast finite-time control law, a robust multivariable higher-order sliding mode control is designed for the air-breathing hypersonic vehicle with actuator failures. Finally, adaptive laws are proposed for the adaptation of the parameters in the robust multivariable higher-order sliding mode control. Thus, the bounds of the uncertainties are not needed in the control system design. Simulation results show the effectiveness of the proposed robust adaptive multivariable higher-order sliding mode control.
Air-breathing hypersonic vehicle (AHV) has been a widely attention-getting technology for the requirement generated by space exploitations and military applications in recent years. The rocket-propelled aircraft systems differ from AHVs, which employ the scramjet engines to get oxygen from the air, and flight at a very high Mach number. Since the dynamics of an AHV is seriously nonlinear, strongly coupled and fast time-varying, the flight control system design is still one of the most difficult challenges in the development of the AHV technology.1
In the past decades, many control methods have been extensively investigated based on an AHV longitudinal dynamic model developed by the NASA Langley Research Center.2 By using a genetic algorithm, a linear stochastic robust altitude and velocity tracking control of an AHV was addressed by Marrison and Stengel.3 In the article by Yang et al.,4 based on fast disturbance estimation by using finite-time disturbance observer, a nonlinear dynamic inversion control was designed for an AHV. In the work by Xu et al.,5,6 based on a longitudinal dynamics of an AHV, neural-network-based adaptive output tracking controllers were investigated. Xu et al.7 proposed a HGO based neural network controller for the AHV, and the tracking error were guaranteed in the semiglobal sense. Sliding mode control (SMC), which is well known as a robust technique to control nonlinear systems operating under uncertainty conditions, is widely used in the flight control system design for an AHV.8,9 In the work by Xu et al.,10 by using a feedback linearization technique, adaptive SMC was investigated for the altitude and velocity control system design for an AHV. In the article by Hu et al.,11 based on the reference model and linearized model, a robust adaptive SMC strategy was studied for the tracking control of a flexible AHV, which can guarantee the global stability of the closed-loop system without the information of the upper bound of the uncertainties and the external disturbance. In the article by Chen et al.,12 by using the backstepping method, an attitude control system was designed for the AHV where the control input saturation and the transient tracking performance can be guaranteed. The disturbance observer technique is an effective way to handle the uncertainty in flight control systems.13,14 In the article by Chen et al.,15 a terminal sliding mode disturbance observer based controller for the AHV was proposed.
In real applications, due to the hash flight environment of an AHV, some failures may occur in the actuators, that is to say the effectiveness of the aerodynamic control surfaces may be lost partially, which may lead to significant performance degradation or even instability of the closed-loop system.16,17 In order to deal with the AHV actuator failures and increase the reliability of the AHV control system, some fault-tolerant control schemes were investigated in the literature, such as neural network based adaptive control18, adaptive backsteping control,19 etc. In the article by Jiang et al.,20 T-S fuzzy systems were employed to approximate the nonlinear attitude dynamics and the actuator fault models, which was demonstrated to be superior to some existing fault-tolerant control schemes. Furthermore, this fuzzy system based fault-tolerant control scheme was expanded to the time-varying actuator failures in the article by Shen and Jiang.21 In the article by Sun et al.,22 based on finite-time integral SMC technique, a fault-tolerant control scheme was proposed for a longitudinal model of an AHV in the presence of actuator failures and external disturbances. In the article by Zhao et al.,23 a dynamic terminal SMC fault-tolerant control scheme was proposed. By introducing an auxiliary system, the states can rapidly and accurately track the desired signals. In the article by Xu et al.,24 compounded adaptive backstepping control and the command filter technique, a fault-tolerant control scheme was designed for the longitudinal dynamics of a generic AHV in the presence of actuator faults and input constraints. By utilizing the parameter adaptation to deal with uncertainties both in the dynamic model and the actuator failures, an output feedback controller was proposed for AHV by He et al.25
Higher order sliding mode control (HOSMC) is an effective way to handle the control problems for uncertainty nonlinear systems.26–29 Compared with the traditional sliding mode control (SMC), the signum function acts on the higher order time derivative of the sliding variable. Then, the restriction on the relative degree in the conventional sliding mode control can be removed. At the same time, HOSMC can achieve a better accuracy with respect to discrete sampling time than the traditional SMC. In the article by Tian et al.,30 based on the multiple-time scale principle, a smooth second order sliding mode control (SOSMC) scheme was investigated for a flexible AHV. Finite time convergent HOSMC methods have been recently proposed in articles by Levant, Laghrouche et al. and Defoort et al.31–35 The algorithm proposed by Levant31 allows the tracking of smooth signals by tuning only one control gain. The quasi-continuous HOSMC algorithm is presented by Levant,32 which transient features are much better than the previous algorithm by Levant,31 and the control signal is continuous everywhere except the higher order sliding set. An integral sliding mode concept is extended to design a HOSMC algorithm by Levant33 and the advantage of the algorithm is that it allows the choosing of transient dynamics, or assigning a transient-time function of initial conditions. In the article by Laghrouche,34 the algorithm is based on integral SMC and guarantees the establishment of a HOSMC. The advantages of this method are the ease of implementation and the robustness of the system during the entire response. However, two drawbacks appear in this approach: it directly depends on the initial conditions of the system and complex off-line computations are needed before starting the control action. In the article by Defoort,35 based on geometric homogeneity37 and integral traditional SMC, a novel HOSMC scheme was proposed. Combining this scheme with adaptive SMC, an adaptive dynamic HOSMC for flexibility was proposed by Zong et al.36 In spite of real advantages (constructive approach does not require complex off-line computation), this approach suffers the drawback that it is impossible to get arbitrary fast convergence (the restriction inherited from the work by Bhat and Bernstein37), when the initial states are far away from the origin.
In this article, an adaptive multivariable HOSMC scheme for an AHV is proposed. As compared with the existing results, the main contributions of this article are listed as follows.
In order to achieve the quickness of the AHV flight control system under the high-dynamic flight environment, a fast convergent robust HOSMC is proposed firstly by adding the linear terms in the equivalent dynamics. The proposed HOSMC can provide a faster convergence rate when the initial state is far away from the origin than that of the standard homogeneous HOSMC (e.g. the articles by Levant and Defoort et al.31,32,33,35). Meanwhile, in the sufficiently small vicinity of the origin, the linear terms can be neglected in comparison with the homogeneous terms. Then, higher order sliding mode is established in finite time with fast transient process.
Both additive and multiplicative uncertainties are considered in the AHV input/output linearization model. The additive uncertainty is caused by uncertainty in system dynamics and multiplicative uncertainty is mainly caused by the actuator failures. Meanwhile, adaptation laws are developed for adaptation of the parameters in the proposed HOSMC. As such the upper bounds of the uncertainties are not required to be known in advance.
The remainder of this article is organized as follows: In ‘Hypersonic flight vehicle model’, the dynamic model of the AHV is presented. In ‘Robust multivariable higher-order sliding mode tracking controller’, a robust multivariable HOSMC scheme for the AHV is presented. In ‘Adaptive robust multivariable HOSMC design’, based on the robust multivariable HOSMC, an adaptation law is developed. Some simulation results are presented in ‘Simulation results’. ‘Conclusions’ concludes this article.
Hypersonic flight vehicle model
In this section, a longitudinal dynamic model of an AHV is presented. This dynamic model is taken from the work by Xu et al.10 and can be described as follows.
The state equation
The output equation
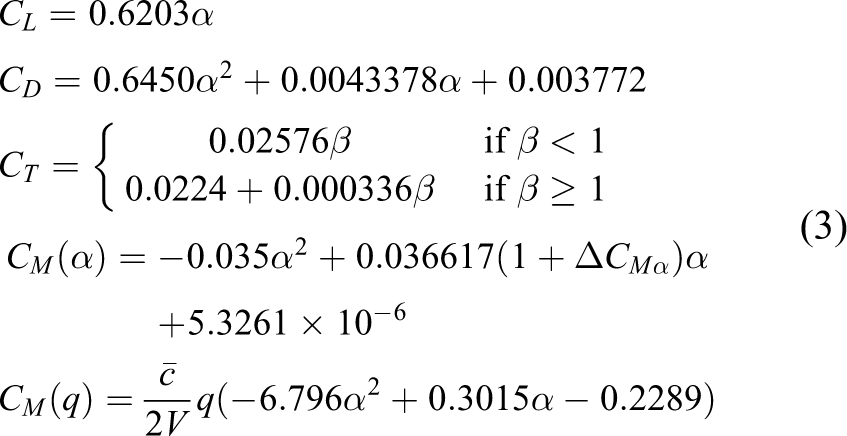
where the state vector . h, V, γ, α, q and β represents the altitude, velocity, flight-path angle, angle of attack, pitch rate, and the throttle setting, respectively. The control input vector , where is the elevator deflection, and is the throttle setting command. The parameters and ς denote the natural frequency and damping ratio of the β dynamics. and denote the pitch moment coefficients due to pitch rate, and angle of attack respectively. , and represent the lift, drag, and thrust coefficients, respectively. The parameters and m represent the moment of inertia, and the mass of the AHV respectively. , μ denote the radius of the Earth, and gravity respectively. The parameters ρ, S, , and denote the air density, the reference area, the mean aerodynamic chord, and the elevator coefficient respectively.
The aerodynamic forces and moment coefficients in equation (1) are calculated as follows (around a trimmed cruising flight condition: , ft/s, ft, rad, and rad/s)
There exists parameter perturbation Δ to its nominal values
where the nominal values of m, μ, , ρ, S, , and are given as follows
The maximum values of the additive uncertainties used in this article are taken as follows
The control objective is that the output V and h can track the prescribed trajectories and under system uncertainties and actuator failures.
Finite time stabilization of a chain of integrators
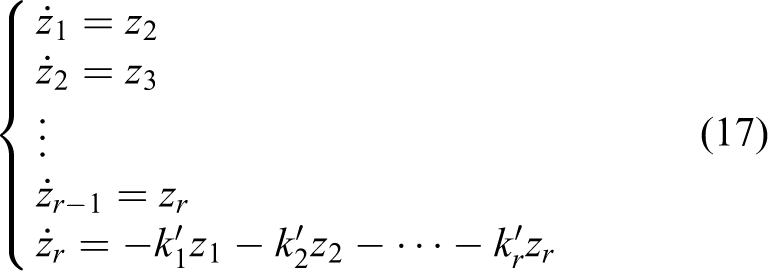
Consider a chain of integrators as follows
The following Lemma will be used in the robust HOSMC design.
Lemma 1. (See Bhat and Bernstein37) Let the positive constants be such that the polynomial is Hurwitz. There is such that, for every , the system given by equation (7) is stabilized at the origin in finite time under the feedback
where and satisfy
with and .▪
Remark 1. Unfortunately, if the initial state is far away from the origin, the convergence rate by using the control law given by equation (8) is rather slow, since the power functions in equation (8) almost do not grow with large arguments. The feature is the inevitable consequence of the homogeneity.
Theorem 1. Let the positive constants and be such that the polynomials and are Hurwitz. There is such that, for every , the system given by equation (7) is stabilized at the origin in finite time under the feedback
and satisfy
with and .
Proof. Firstly, the conclusion , can be proved by using the induction method.
By using equation (14), it can be concluded that . Observing the above equalities, it yields
Thus, it can be concluded that
It is noted that finite time control law (10) is the combination control law given by equation (8) and linear control terms. Analyzing the dynamics of the systems given by equations (7) and (10), the two cases are considered as follows.
When the system state is far away from the origin (i.e. ), the linear control term will dominates over the corresponding nonlinear control term . Thus, system (7) dynamics can be approximated by
and the polynomial is Hurwitz, that yields faster asymptotic convergence of the states driven by the control law given by equation (10) rather than by the control law given by equation (8).
When the system states are close to the origin (i.e. ), the nonlinear control term will dominate over the linear ones . Thus, the dynamics of the system given by equation (7) can be approximated by
and the polynomial is Hurwitz, the system given by equation (18) coincides with equation (8) in Lemma 1, which guarantees finite time convergent to the origin.
Hereby, the dynamics converge very quickly in the system given by equation (7) under feedback law given by equation (10). This completes the proof.□
Robust multivariable HOSMC design for the AHV
By using the input/output feedback linearization technique, the AHV longitudinal dynamic models given by equations (1) and (2) can be completely linearized without internal dynamics, which can be expressed as follows10
where L is the standard Lie derivative notation.
Consider the system uncertainty and the actuator failures, and the AHV input/output dynamics, equation (19) can be written as
where is the nominal system matrix and is the nominal control gain matrix. and are the system uncertainties, which are caused by the parameter uncertainties and external disturbances. Here, which is the unknown effectiveness matrix of the control input, which is caused by the actuator failures. In this article, only partial loss failures in the actuators are considered, i.e. , , which means the actuator will not lose its effectiveness completely.
Assumption 1.There are three constants , , and , such that the uncertainty functions , , and the effectiveness matrix satisfy
Remark 2.Inequation (20), we assume that the bound of the additive uncertainty is dependent on the norm of system state , and we can find a similar assumption in the work by Li et al9. Meanwhile, in this article, we assume that the uncertainty of the control gain matrix and the control effectiveness matrix Λ can not change the control direction. The term in equation (21) can be written as , and can be seen as the total multiplicative uncertainty. If holds, the control direction is the same as that of the nominal system, that is to say in this article, the problem of unknown control direction is not considered.
Since the control objective is that the AHV can track velocity reference signal and altitude reference signal , we define the following sliding variables
In order to design HOSMC, we define a set of integral sliding surfaces in and space, passing through the origin to represent a sliding manifold as
where the parameters , , , , , and are selected according to Theorem 1. By using equation (19), the derivative of the sliding manifold equation (23) can be expressed as
where
where we adopt the notions that
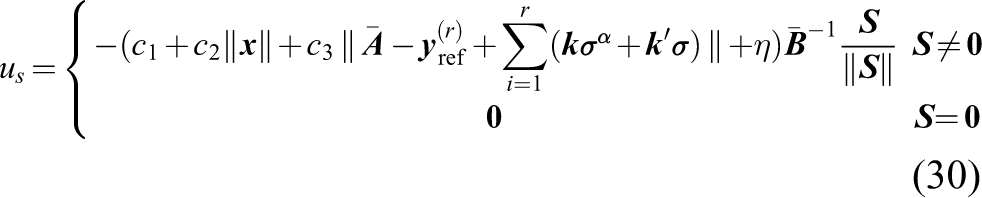
Theorem 2.For the AHV dynamic model given byequation (1)with sliding variablesequation (23), if the control u is designed as follows
where each part is obtained respectively as
and the designed parameters are chosen as
then, the control laws given byequations (28)to (30) ensures the establishment of higher order sliding modes , and in finite time.
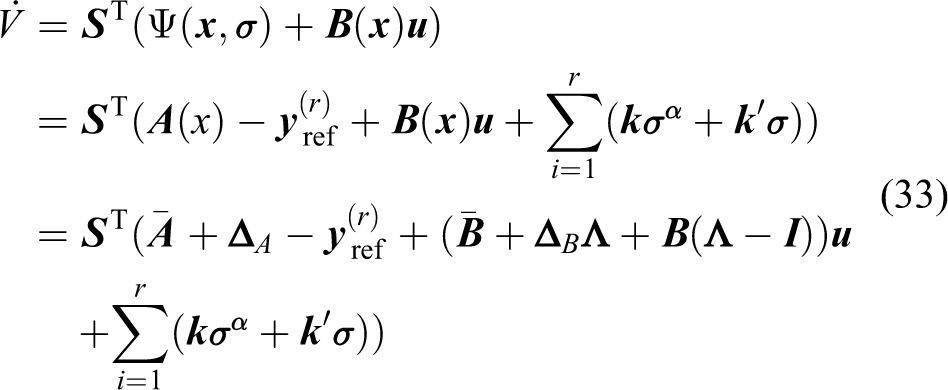
Proof. Consider the following Lyapunov function candidate
Thus, system trajectories evolve on the manifold in finite time and remain there in spite of the uncertainties. In the sliding mode, the closed-loop dynamics obtained can be obtained by . According to the definition of S and Theorem 1, we can conclude that higher-order sliding modes and are established in finite time. This completes this proof.□
Remark 3.From the designed control laws given byequations (28)to (31), it is seen that the switching term is used to compensate the system uncertainties and the actuator failures. Then, the proposed method in this article is a passive fault-tolerant control system.
Adaptive robust multivariable HOSMC design
Under the control laws given by equations (28) to (30), higher-order sliding modes and will be established in finite time. Actually, in an AHV practical flight environment, the bounds of uncertainties may not be obtained easily due to the physical and aerodynamic parameter perturbations and actuator failures, that is to say it is not easy to achieve the upper bound of the terms and . Then the next phase is to design adaptation laws for the parameters , and in the control law given by equation (30)
where
where , , and are the estimated values of , , and , is a designed positive constant. The adaptive gains , , and in equation (38) are designed as
where , and are denoted as adaptation gains, and .
Theorem 3.Consider the AHV dynamic model given byequation (1). If the the control law, and the adaptive law are designed asequations (36)to (38) and (39)to (41), respectively. Then, higher-order sliding modes: and can be established in finite time.
Proof. Define parameter errors as
where , and are defined in inequalities in equation (21).
Consider a Lyapunov function candidate as
Noting that , and using control equations (36) to (41), the time derivative of V is
The inequality in equation (45) indicates that S will approach in finite time . In sliding mode, the closed-loop dynamics obtained can be obtained by . According to the definition of S and Theorem 1, higher-order sliding modes and will be established in finite time. Since the value of V is bounded, one can see that (and hence ) are all bounded. According to equation (40), the solution of is
Since are bounded, and the integrand is nonnegative, the state variable x of equation (1) must be bounded for . This completes the proof.□
Remark 4.The methodology is applicable where is reachable. However, in real sliding mode control, cannot become exactly zero in finite time due to nonlinearities and switching delays. Thus the adaptive parameters , , and may increase boundlessly. A simple way of overcoming this difficulty is to modify the adaptive tuning law by using the dead zone technique as shown by Utkin38
Simulation results
In this section, simulation studies are carried out to confirm the effectiveness of the proposed control scheme. The velocity command is a step change of 300 ft/s from 15,060 ft/s. The altitude command is a step change of 2000 ft from 110,000 ft. The tracking reference commands and are generated by the following filters
where , , , , , . To demonstrate the robustness of the proposed control method, the parameters uncertainties are selected as: , , , , , . The parameters in the proposed controller equations (37) and (47) to (50) are as follows: , , , , , , , , , , , , , , , , . For a comparison study, the multivariable traditional SMC proposed by Li et al.9 is employed in the controller design for the AHV (equation (1)).
In these simulation studies, two cases of actuator failures are considered as follows:
Case I: The constant actuator failures
where
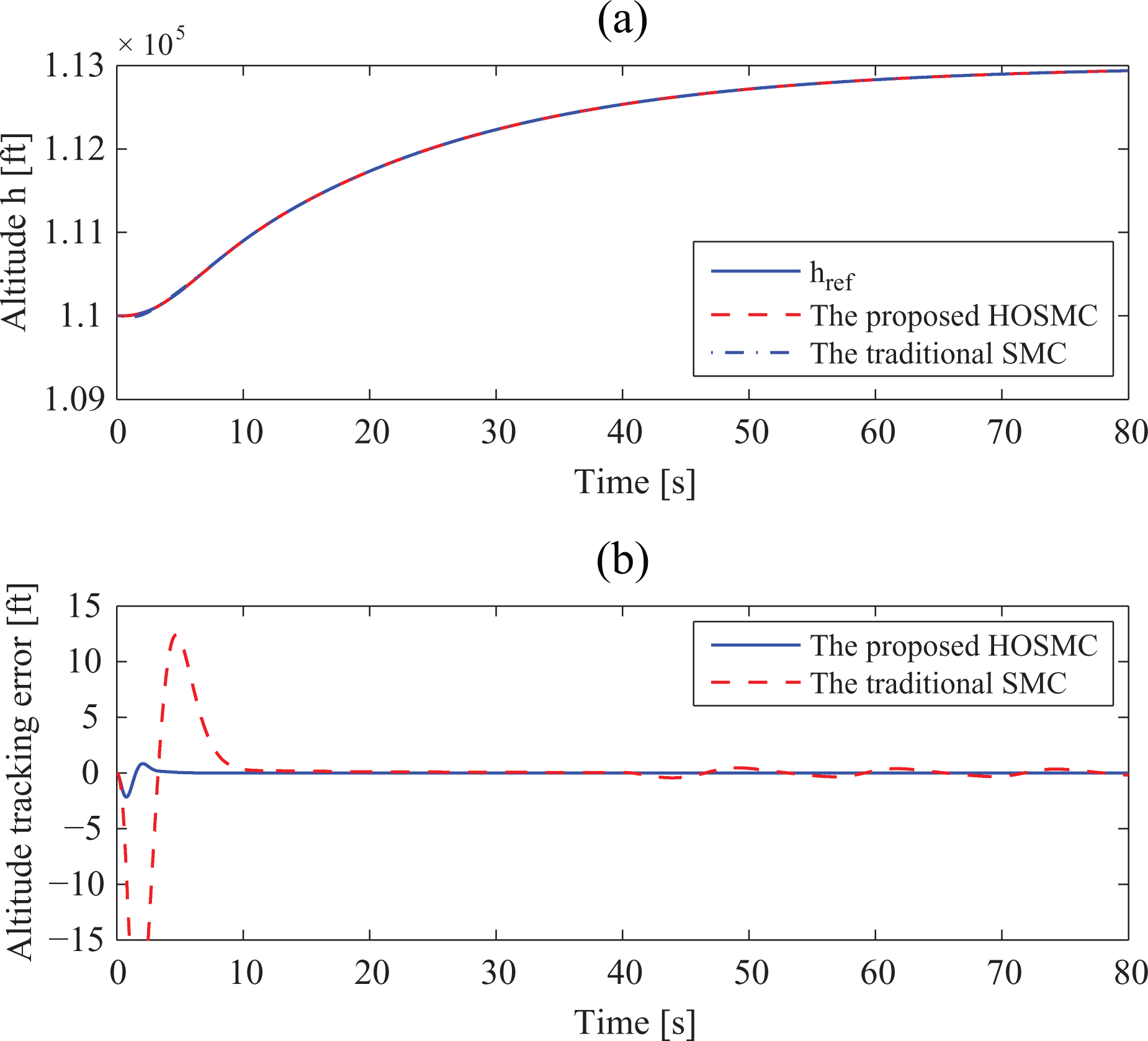
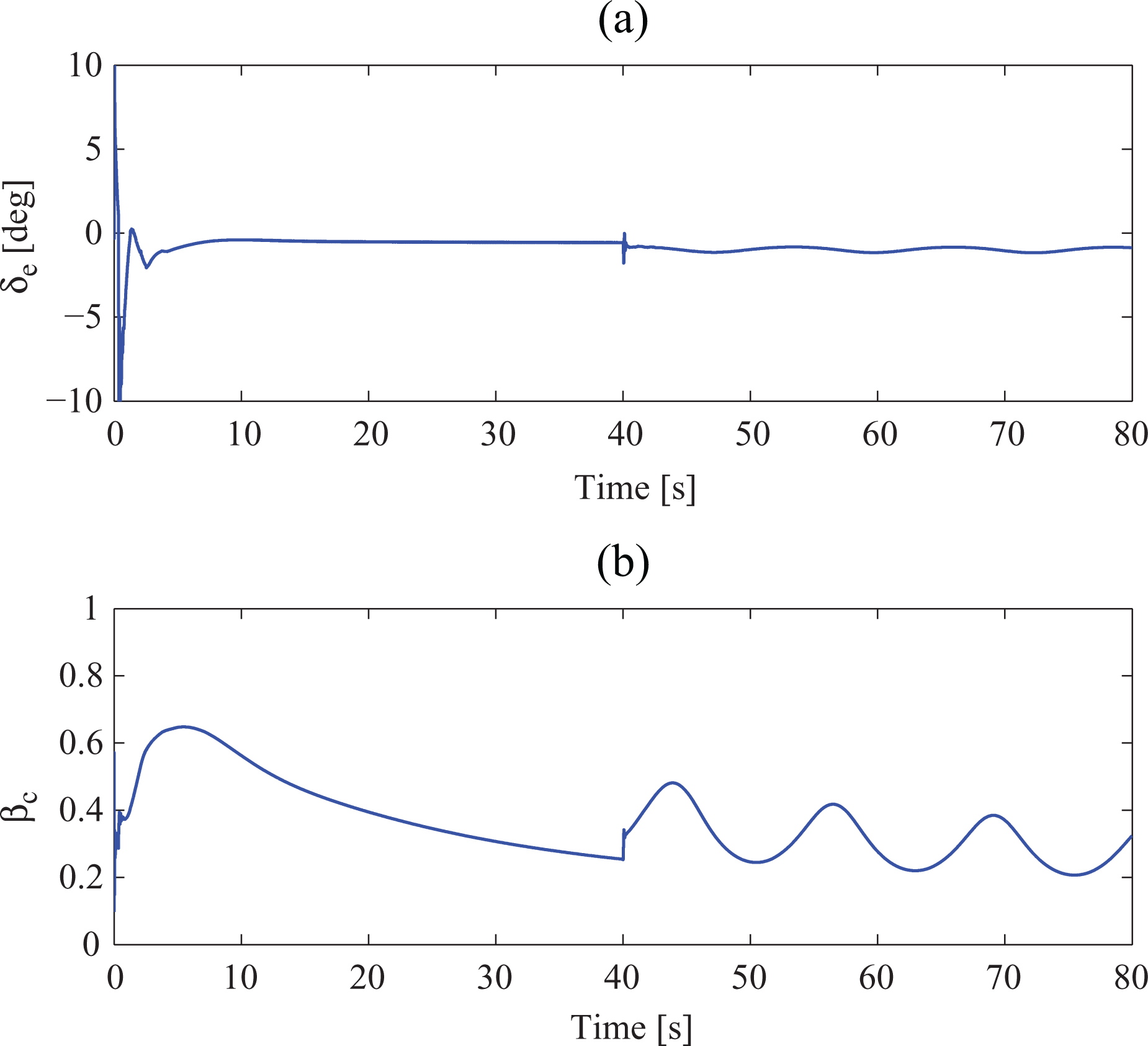
The simulation results are shown in Figures 1 to 5. From Figures 1 and 2, we can see that by using both the proposed HOSMC and the traditional SMC, the AHV output V and h can track the reference signals. The tracking error of the proposed HOSMC is smaller than that of the traditional SMC, and the transient process of the proposed HOSMC is also faster than that of the traditional SMC. Even in the moment t = 40 s, the constant actuator failures occurrence, the proposed HOSMC method can ensure the steady state tracking error goes to zero quickly. Figure 3 shows the adaption gains , , and , and it is observed that the adaptation gains are bounded. The control input signals and when using the proposed HOSMC are shown in Figure 4, and the control signals are continuous and the chattering phenomenon is not observed. Figure 5 shows the control input signals of the traditional SMC.
The response curves of (a) the actual output (V) and (b) the velocity tracking error (Case I).
The response curves of (a) the actual output (h) and (b) the velocity tracking error (Case I).
The adaption gains (a) , (b) , and (c) in the proposed HOSMC (Case I).
The control input (a) and (b) when using the proposed HOSMC (Case I).
The control input (a) and (b) when using the traditional SMC (Case I).
Case II: The time-varying actuator failures
where
The simulation results are displayed in Figures 6 to 10. From Figures 6 and 7, we can see that the proposed HOSMC have a smaller overshoot and a faster transient process. Under the time-varying actuator failures, the proposed HOSMC can have a good performance with and during this simulation. The traditional SMC can not guarantee a small steady-state tracking error when the time varying actuator failures occur. Figure 8 shows the adaption gains , , and of the proposed HOSMC, which are bounded. The control inputs and when using the proposed HOSMC are shown in Figure 9. The control inputs and when employing the traditional SMC are shown in Figure 10.
The response curves of (a) the actual output () and (b) the velocity tracking error (Case II).
The response curves of (a) the actual output (h) and (b) the velocity tracking error (Case II).
The adaption gains (a) , (b) , and (c) in the proposed HOSMC (Case II).
The control input (a) and (b) when using the proposed HOSMC (Case II).
The control input (a) and (b) when using the traditional SMC (Case II).
Conclusions
This article addresses the reference command tracking for the longitudinal dynamics of an AHV with actuator failures. The feedback linearization method is used and the system uncertainties and external disturbances are considered as additive uncertainty and the actuator failures are considered as multiplicative uncertainty. Based on the proposed fast finite-time control law for a chain of integrators, a robust multivariable higher-order sliding mode controller is designed for the AHV. Furthermore, an adaptive law is proposed to estimate the bounds of the additive and multiplicative uncertainty. Simulation results demonstrate that the proposed adaptive multivariable HOSMC can achieve desired tracking performance and good robustness under the actuator failures.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grants 61403407.
References
1.
FiorentiniLSerraniABolenderMA. Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles. J Guid Control Dyn2009; 32: 401–416.
2.
XuBShiZK. An overview on flight dynamics and control approaches for hypersonic vehicles. Sci China Inform Sci2015; 58: 1–19.
3.
MarrisonCIStengelRF. Design of robust control systems for a hypersonic aircraft. J Guid Control Dyn1998; 21: 58–63.
4.
YangJLiSHSunCY. Nonlinear disturbance observer based robust flight control for airbreathing hypersonic vehicles. IEEE Trans Aerosp Electron Syst2013; 49: 1263–1275.
5.
XuBYangCGPanYP. Global neural dynamic surface tracking control of strict-feedback systems with application to hypersonic flight vehicles. IEEE Trans Neural Netw Learn Syst2015; 26: 2563–2575.
6.
XuBFanYHZhangSM. Minimal learning parameter technique based adaptive neural control of hypersonic flight dynamics without back-stepping. Neurocomputing2015; 164: 201–209.
7.
XuBGaoDXWangSX. Adaptive neural control based on HGO for hypersonic flight vehicles. Sci China Inform Sci2011; 54: 511–520.
8.
ShtesselYEdwardsCFridmanL. Sliding mode control and observation. New York: Springer, 2013.
9.
LiPMaJJZhengZQ. Robust adaptive sliding mode control for uncertain nonlinear MIMO system with guaranteed steady state tracking error bounds. J Franklin Inst2016; 353: 303–321.
10.
XuHJMirmiraniMDIoannouPA. Adaptive sliding mode control design for a hypersonic flight vehicle. J Guid Control Dyn2004; 27: 829–838.
11.
HuXXWuLGHuCH. Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle. J Franklin Inst2012; 349: 559–577.
12.
ChenMWuQXJiangCS. Guaranteed transient performance based control with input saturation for near space vehicles. Sci China Inform Sci2014; 57: 1–12.
13.
XuB. Disturbance Observer based dynamic surface control of transport aircraft with continuous heavy cargo airdrop. IEEE Trans Syst Man Cybern2016. DOI: 10.1109/TSMC.2016.2558098.
14.
XuBSunFCPanYP. Disturbance observer based composite learning fuzzy control of nonlinear systems with unknown dead zone. IEEE Trans Syst Man Cybern2016. DOI: 10.1109/TSMC.2016.2562502.
15.
ChenMRenBBWuQX. Anti-disturbance control of hypersonic flight vehicles with input saturation using disturbance observer. Sci China Inform Sci2015; 58: 1–13.
16.
YuXJiangJ. Fault-tolerant flight control system design against control surface impairments. IEEE Trans Aerosp Electron Syst2012; 48: 1031–1051.
17.
ChenM. Constrained control allocation for overactuated aircraft using a neurodynamic model. IEEE Trans Syst Man Cybern2015. DOI: 10.1109/TSMC.2015.2505687.
18.
ChenMTaoG. Adaptive fault-tolerant control of uncertain nonlinear large-scale systems with unknown dead-zone. IEEE Trans Cybern2016; 46: 1851–1862.
19.
XuBWangSXGaoDX. Command filter based robust nonlinear control of hypersonic aircraft with magnitude constraints on states and actuators. J Intell Robot Syst2014; 73: 233–247.
20.
JiangBGaoZFShiP. Adaptive fault-tolerant tracking control of near-space vehicle using Takagi-Sugeno fuzzy models. IEEE T Fuzzy Syst2010; 18: 3161–3171.
21.
ShenQJiangBCocquempotV. Fault-tolerant control for T-S fuzzy systems with application to near-space hypersonic vehicle with actuator faults. IEEE T Fuzzy Syst2012; 20: 652–665.
22.
SunHBLiSHSunCY. Robust adaptive integral-sliding mode fault-tolerant control for airbreathing hypersonic vehicles. Proc Inst Mech Eng I J Syst Control Eng2012; 226: 1344–1355.
23.
ZhaoJJiangBShiP. Fault-tolerant control design for near-space vehicles based on a dynamic terminal sliding mode technique. Proc Inst Mech Eng I J Syst Control Eng2012; 226: 787–794.
24.
XuBGuoYYuanY. Fault-tolerant control using command-filtered adaptive back-stepping technique: Application to hypersonic longitudinal flight dynamics. Int J Adapt Control Signal Process2016; 30: 553–577.
25.
HeJQiRJiangB. Adaptive output feedback fault-tolerant control design for hypersonic flight vehciles. J Franklin Inst2015; 352: 1811–1835.
26.
LevantA. Sliding order and sliding accuracy in sliding mode control. Int J Control1993; 58: 1247–1263.
27.
BartoliniGFerraraAUsaiE. Chattering avoidance by second order sliding mode control. IEEE Trans Automat Contr1998; 43: 241–246.
28.
LiPZhengZQ. Robust adaptive second-order sliding-mode control with fast transient performance. IET Control Theory A2012; 6: 305–312.
TianBLSuRFanWR. Multiple-time scale smooth second order sliding mode controller design for flexible hypersonic vehicles. Proc Inst Mech Eng I J Syst Control Eng2015; 229: 781–791.
31.
LevantA. Universal siso sliding-mode with finite-time convergence. IEEE Trans Automat Contr2001; 46: 447–1451.
LevantAAlelishviliL. Integral high-order sliding modes. IEEE Trans Automat Contr2007; 52: 1278–1282.
34.
LaghroucheSPlestanFGlumineauA. Higher order sliding mode control based on integral sliding mode. Automatica2007; 43: 531–537.
35.
DefoortMFloquetTKokosyA. A novel higher order sliding mode control scheme. Syst Control Lett2009; 58: 102–108.
36.
ZongQWangJTaoY. Adaptive high-order dynamic sliding mode control for a flexible air-breathing hypersonic vehicle. Int J Robust Nonlin2013; 23: 1718–1736.
37.
BhatSPBernsteinDS. Geometric homogeneity with applications to finite time stability. Math Control Signal2005; 17: 101–127.
38.
UtkinVI. Sliding modes in control and optimization. Berlin: Springer, 1992.