
Abstract
Unmanned aerial vehicles (UAVs) performing transportation tasks in complex mountainous areas face challenges from unstructured terrain and the need for dynamic obstacle avoidance. The Grey Wolf Optimization (GWO) algorithm is characterized by its simple structure and minimal parameter tuning, and has demonstrated strong performance in practical applications. However, it suffers from slow convergence speed and a strong tendency to become trapped in local optima. Therefore, this study proposes an Adaptive Intelligent Grey Wolf Optimization (AIGWO) algorithm for UAV transportation path planning in complex mountainous environments. To objectively characterize the mountainous environment and quantitatively assess path quality, a three-dimensional spatial model integrating static terrain, dynamic obstacles, and random noise, together with a multi-objective evaluation function considering path length, flight altitude, and turning angle, were constructed. In order to accelerate convergence, an adaptive search strategy was developed to dynamically balance global exploration and local exploitation. For enhancing the algorithm's exploitation capability and improving population diversity, a candidate position update strategy based on dimensional learning was proposed. Furthermore, dynamic obstacle evolution models and random noise interference mechanisms were established to rigorously evaluate the algorithm's robustness. Finally, the proposed AIGWO algorithm was compared with five advanced algorithms (namely GWO, IGWO, LGWO, PSO, and GA). The results demonstrate that AIGWO achieves a reasonable running time while reducing the number of convergence iterations by 38.8%, shortening the flight path length by 4.6%, and improving the optimal fitness value by 20.0% compared to the benchmark algorithms. These findings confirm the significant superiority of the proposed algorithm for UAV transportation path planning in complex mountainous areas.
Keywords
Introduction
Unmanned aerial vehicles (UAVs) are widely deployed in both military and civilian domains, encompassing applications such as reconnaissance, surveillance, search and rescue, disaster response, logistics support, and environmental monitoring, all of which impose stringent requirements for efficient, safe, and reliable path planning.1–3 Particularly in complex mountainous regions, UAVs play a critical role, yet this harsh environment presents significant challenges, including unstructured terrain, dynamic weather conditions, uncertain obstacle placement, and demanding constraints on flight stability, energy efficiency, and real-time adaptability during prolonged missions.
Early path planning algorithms, such as Dijkstra's algorithm 4 and the A* algorithm, 5 rely on discrete node-based shortest path computations and are primarily suited to simple static scenarios. However, they struggle to adapt to high-dimensional mountainous environments and dynamic tasks.6–8 Later, metaheuristic approaches have been widely adopted for UAV path planning. Particle Swarm Optimization (PSO) 9 simulates swarm foraging behavior and exhibits excellent performance in small-scale static tasks. Ant Colony Optimization 10 achieves path coordination through pheromone accumulation, rendering it suitable for structured environments. Deep reinforcement learning-based methods 11 depend on scenario-specific training data to enable adaptive path adjustment, making them well suited to fixed-type tasks.
Recent studies have significantly advanced UAV path planning across diverse scenarios and strengthened metaheuristic theoretical frameworks. For example, Tian et al. 12 proposed the TSEB-DDPG algorithm for UAV path planning in complex urban environments, while Wang et al. 13 developed the RLTARO algorithm by integrating reinforcement learning and thermal guidance for mountainous UAV formation path planning. Owing to its simple structure, minimal parameter tuning, strong global search capability, and rapid convergence, the Grey Wolf Optimization (GWO) algorithm 14 has been widely adopted to address UAV path planning in complex environments. Recent improvements to GWO include the following representative works: Liu et al. 15 employed Gaussian mutation and helical functions to escape local optima. Dezfouli et al. 16 introduced a cosine transfer function to transform continuous GWO into a binary variant for discrete problems. Duan et al. 17 incorporated Sine Cosine Algorithm into the position updates of leading wolves to mitigate premature convergence, and Yu et al. 18 proposed HGWODE, a hybrid of GWO and differential evolution, to balance exploration and exploitation. In addition, Kiani et al.19–21 have developed scenario-specific solutions, including two 3D path planning methods based on I-GWO and Ex-GWO for collision-free multi-UAV coordination, the Adapted-RRT hybrid algorithm to optimize path optimality and execution efficiency for autonomous robots, and adaptive metaheuristic methods for collision-free path generation in farmland robots. They also designed a dynamic IIoT protocol 22 for industrial resource management and path planning. Anka et al.23–26 have further advanced metaheuristic theory through a comprehensive study on the Mountain Gazelle Optimizer for balanced exploration and exploitation in complex multi-objective tasks, the Ex-ChOA algorithm for enhanced convergence in high-dimensional constrained problems, the HGPSO method integrating Genetic Algorithm (GA) and PSO for IoT sensor deployment, and a review of Sand Cat Swarm Optimization for stable and low-cost optimization in real-world applications.
Notably, although the aforementioned studies offer significant contributions within their respective domains, they have not been tailored to the unique requirements of UAV transportation in complex mountainous areas. In particular, existing GWO variants typically rely on isolated or static enhancements—such as single-parameter adaptation or fixed perturbation mechanisms—rather than an integrated design tailored to the target scenario. To meet the specific demands of UAV transportation tasks in such challenging terrain, this study proposes an Adaptive Intelligent Grey Wolf Optimization (AIGWO) algorithm. Unlike incremental combinations of isolated strategies, the novelty of AIGWO lies in the synergistic integration of multiple mechanisms tailored to this mission context: (1) Construction of a multi-objective evaluation function incorporating path length, flight altitude, and turning angle to accommodate the multi-dimensional constraints of UAV transport; (2) Design of an adaptive search strategy to accelerate convergence by dynamically balancing global exploration and local exploitation; (3) Development of a candidate position update strategy based on dimensional learning to maintain search diversity and mitigate premature convergence to local optima; (4) Establishment of a dynamic obstacle motion model and a path-planning simulation environment subject to random noise interference to validate the algorithm's robustness. Finally, the AIGWO algorithm was experimentally compared with five advanced algorithms, thereby demonstrating its superior performance for UAV transportation.
Construction of map models and evaluation functions
For UAV performing transport tasks in complex mountainous areas, accurate path planning is inseparable from effective environmental cognition and quantitative evaluation. To objectively describe and evaluate such environments, a three-dimensional spatial model and multi-objective evaluation functions are constructed. The latter is also used to assess the effectiveness of the proposed algorithm.
Map models
Complex mountainous environments are highly unstructured. Fixed geographic elements such as mountain ranges can be clearly presented by static maps, while dynamic obstacles such as mountain vehicles and wildlife and random noise, which are rarely considered in traditional methods, exist in real mountainous regions. Thus, three-dimensional spatial maps integrated with dynamic obstacles and random noise are established.
Details of the static terrain models, dynamic obstacles, and random noise are presented as follows.
Static terrain model
Static terrain models are capable of accurately depicting fixed elements in complex mountainous areas, providing a stable base environment for path planning. 27 Such models consist of a digital terrain model and a mountain hazardous area model.
The digital terrain model is expressed as:

Where
The mountain dangerous area model is shown below:

Where
The mountain terrain model is as follows:

Where
To simplify the problem rationally, the UAV is equated to a point in the 3D spatial model for efficient path planning, which also helps to simplify the collision detection with mountain terrain and obstacles during transportation.
Dynamic obstacles
Dynamic modeling focuses on changes of moving elements in complex mountainous areas to capture real-time environmental dynamics. Moving obstacles with different motion patterns (linear, circular, random) are simulated to provide a realistic and complex test environment for path planning.
(1) Linear motion:

The boundary reflection conditions are as follows:

Where
(2) Circular motion:


Where
(3) Random motion:


Multi-mode motion rules for dynamic obstacles are defined mathematically, supporting mixed scenes of multiple motion mode and providing a high-fidelity test environment for the path planning algorithm.
Random noise
Environmental measurements in complex mountainous regions are susceptible to signal interference and other factors, leading to unavoidable measurement errors. These errors and interferences are simulated by introducing random noise to improve the model's adaptability and robustness.28–29

Where
This simulates terrain uncertainty in real mountainous environments caused by measurement errors, natural undulations, or sensor noise, generating non-idealized complex terrain for more practical test scenarios of the optimization algorithm.
Multi-objective evaluation function
To objectively evaluate complex mountainous environments and verify subsequent algorithm effectiveness, a multi-objective evaluation function (path length, flight altitude, turning angle) is constructed, tailored to mountain transport core requirements: energy conservation, safety, and flight stability.
(1) Path length: A shorter path reduces UAV fuel consumption and transport time, lowering transport costs and improving delivery timeliness. It is thus adopted as a key evaluation index, with the expression:

Where
(2) Flight altitude: Stable flight altitude adapting to mountain terrain undulations ensures the safety of transported materials and reduces the impact of mountain airflow on flight stability. The expression is:

Where Z is the altitude vector, and
(3) Flight turning angle: A smaller turning angle ensures stable and smooth flight, reducing sway and collision risks. The expressions are:


Where
In summary, the multi-objective evaluation function for UAV mountain transport path planning is:

Where
AIGWO
GWO is favored for UAV path planning due to its simple structure and minimal parameter tuning requirements. However, it faces limitations such as slow convergence and susceptibility to local optima, which are exacerbated in complex mountainous transport scenarios characterized by unstructured terrain, dynamic obstacles, and large-scale search spaces. To address these problems, an AIGWO is proposed. In order to accelerate convergence of the algorithm, an adaptive search strategy based on an adaptive decay factor and search method is designed. And a candidate position updating strategy based on dimensional learning is designed to jump out of the local optimum. The following section will describe in detail.
GWO
GWO simulates the social hierarchy and hunting behavior of grey wolf packs, with four hierarchical roles (





Where

Where
Adaptive search strategy
To enhance AIGWO's adaptability to complex mountainous terrain characterized by rugged landform and scattered obstacles, an adaptive search strategy is designed to dynamically balance global exploration and local exploitation. Global exploration targets traversing large-scale unstructured terrain, while local exploitation focuses on optimizing path quality. Integrated into this strategy are adaptive decay factor adjustment based on iteration progress and population diversity, multi-scale search methods, and simplified Levy flight, which collectively enhance the algorithm dynamic responsiveness and search efficiency and accuracy in path planning.
Adaptive decay factor
Instead of the linear decay of a in traditional GWO,
31
a diversity-aware decay factor



Where
Adaptive Search Modes
A single search mode fails to balance efficiency and comprehensiveness in complex mountainous transportation. Three adaptive search modes are designed, switched based on the positional relationship between the leading wolf and potential optimal paths to improve search flexibility and accuracy. The key modes and their calculations are as follows:
(1) Initial search: Guides the swarm towards potential optimal paths by weighting the top three wolves, accelerating early convergence in unknown mountainous areas:

(2) Breadth search: Expands the search scope by referencing the swarm's average position, suitable for exploring wide mountainous regions and maintaining population diversity:


Where
Where
(3) Depth search: Adopts simplified Levy flight for precise path optimization near mountain obstacles, avoiding local optima:

Where

Where

Where
The three modes are switched adaptively: initial search for early global scanning, breadth search for maintaining diversity in wide areas, and depth search for local obstacle avoidance, matching the multi-scale characteristics of mountainous transportation tasks.
Candidate position update strategy
To address slow convergence and premature loss of population diversity for mountainous UAV path planning, a dimensional learning-based candidate position update strategy is proposed. This strategy constructs a neighborhood space for each search agent to enhance diversity, avoid local optima, and guide convergence to optimal paths.
Specifically, normalized weights are adaptively allocated using the tanh function and hierarchical coefficients to balance global exploration and local exploitation, with weight calculations as follows:



Where
The balance between exploration and exploitation efficiency is achieved by exponential decay to control the search radius. The radius is calculated as follows:


Where
To optimize neighborhood search efficiency in sparse mountainous areas, global elite individuals are precomputed as backup neighbors, with the global fitness sorting and empty neighborhood handling defined as:


Where F is the fitness vector of all individuals,
The fitness translation, selection probability calculation, and dimensional learning position update are given by:



Where
Boundary-crossing positions are pulled back into the feasible region via mirror reflection to ensure path feasibility:

Where
Finally, the optimal candidate position is selected by comparing the fitness of

This integrated strategy combines the advantages of leading wolf guidance and dimensional learning, ensuring both convergence speed and diversity in complex mountainous path planning.
In traditional GWO, wolves are guided solely by the leading wolf, leading to slow convergence and premature loss of diversity in complex mountainous path planning. A candidate position update strategy based on dimensional learning is proposed to construct a neighborhood space for each search agent, enhance population diversity, and avoid local optima while guiding convergence to optimal paths.
AIGWO algorithm flow
The flow of the AIGWO algorithm for UAV mountainous transportation path planning is illustrated in Figure 1, and the main steps are described as follows:
Step 1: Initialization.

Flowchart of the AIGWO algorithm.
Set the maximum number of iterations T, population size N, upper/lower bounds Step 2: Fitness ranking.
Sort the fitness values, record the positions Step 3: Adaptive parameter adjustment.
Calculate the population diversity ratio Step 4: Search method switching.
Probabilistically select one of the initial, breadth, or depth search modes and update the positions of the wolves accordingly (equations (25), (26) and (28)).
Step 5: Candidate position generation.
Compute Step 6: Optimal position selection.
Update the swarm position using (equation (42)) and record the convergence curve.
Step 7: Termination check.
If the maximum number of iterations is reached, output the optimal path; otherwise, return to Step 2.
Core advantages over GWO variants
To highlight the novelty of AIGWO relative to incremental combinations of existing strategies, a targeted comparison was conducted with representative GWO variants (Aquila Exploration Grey Wolf Optimizer (AGWO), 33 Lévy-embedded Grey Wolf Optimizer (LGWO), 34 and Improved Grey Wolf Optimizer (IGWO) 35 ) commonly applied in UAV path planning. These variants typically rely on static or isolated enhancements: AGWO only adjusts the convergence factor adaptively, IGWO optimizes solely the random weight in position updates, and LGWO uses a fixed-radius local search.
In contrast, AIGWO's superiority arises from its scenario-specific, dynamic, and synergistic integration designed specifically for UAV transportation in complex mountainous environments. In particular, the adaptive decay factor is adjusted dynamically based on population diversity and is tightly integrated with three multi-scale search strategies as well as a dimension-learning-based candidate position update mechanism. This coordinated mechanism enables real-time tuning of the exploration–exploitation balance in response to convergence feedback, thereby effectively mitigating the limitations of prior variants, such as inadequate multi-objective adaptation and limited robustness against dynamic obstacles.
Moreover, the multi-objective evaluation function is tailor-made to prioritize practical mission constraints rather than generic optimization metrics. As demonstrated in section “Experimental design and result analysis,” this holistic design allows AIGWO to outperform GWO variants in high-dimensional, multi-constrained, and uncertain mountainous scenarios, delivering a better trade-off among convergence speed, solution quality, and environmental robustness. These results substantiate that AIGWO is not merely a simple hybrid but a mission-oriented innovation.
Time complexity and scalability analysis
To assess the practical applicability of AIGWO in UAV path planning, its time complexity and scalability with respect to population size
Time Complexity Analysis
The total time complexity of AIGWO is
Scalability Evaluation
Scalability was evaluated under standardized experimental conditions, using average runtime as the primary metric. Controlled experiments isolated the impact of each parameter by varying one while fixing the others at baseline values ( Population Size (
Population sizes were varied from 30 to 200. Runtime increased significantly from approximately 1.87 to 3.32 s. As shown in Figure 2, this trend exhibits clear quadratic behavior, confirmed by curve fitting to the model ( 2. Scalability with Respect to D and
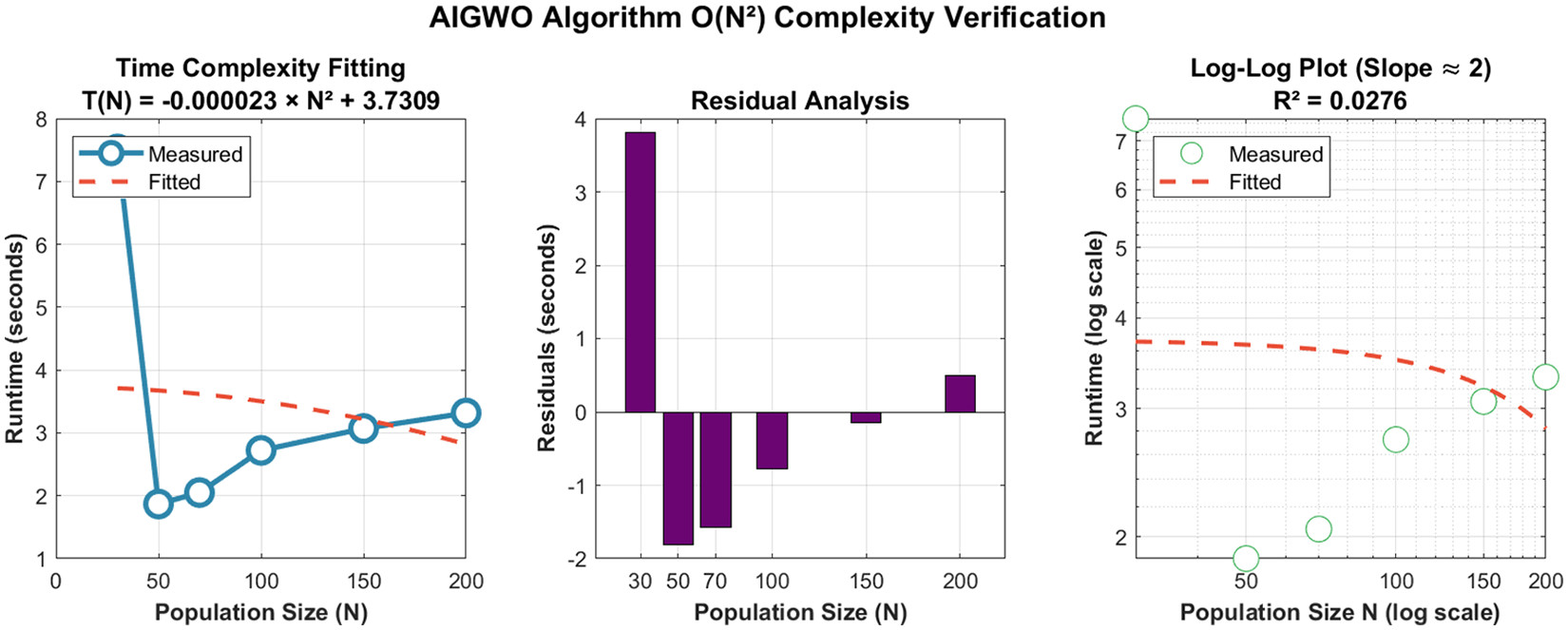
O(N2) complexity verification for AIGWO.
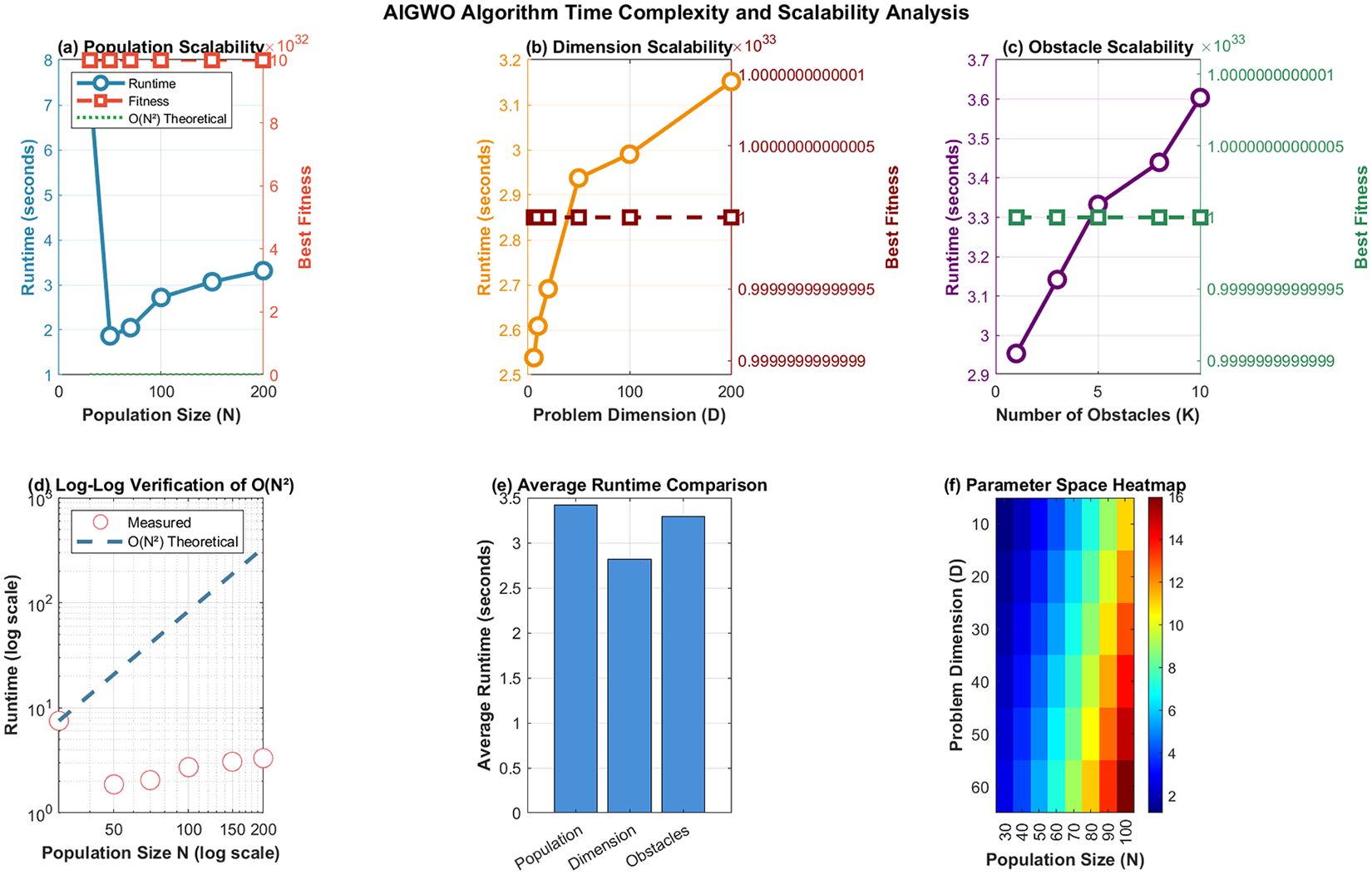
AIGWO time complexity and scalability.
When D increased from 6 to 200, runtime rose moderately and approximately linearly from 2.54 to 3.15 s, verifying the
When K increased from 1 to 10, runtime increased modestly from 2.95 to 3.60 s, indicating Comprehensive Validation
Normalized runtime analysis (Figure 4) further confirmed the hierarchical impact of the parameters:
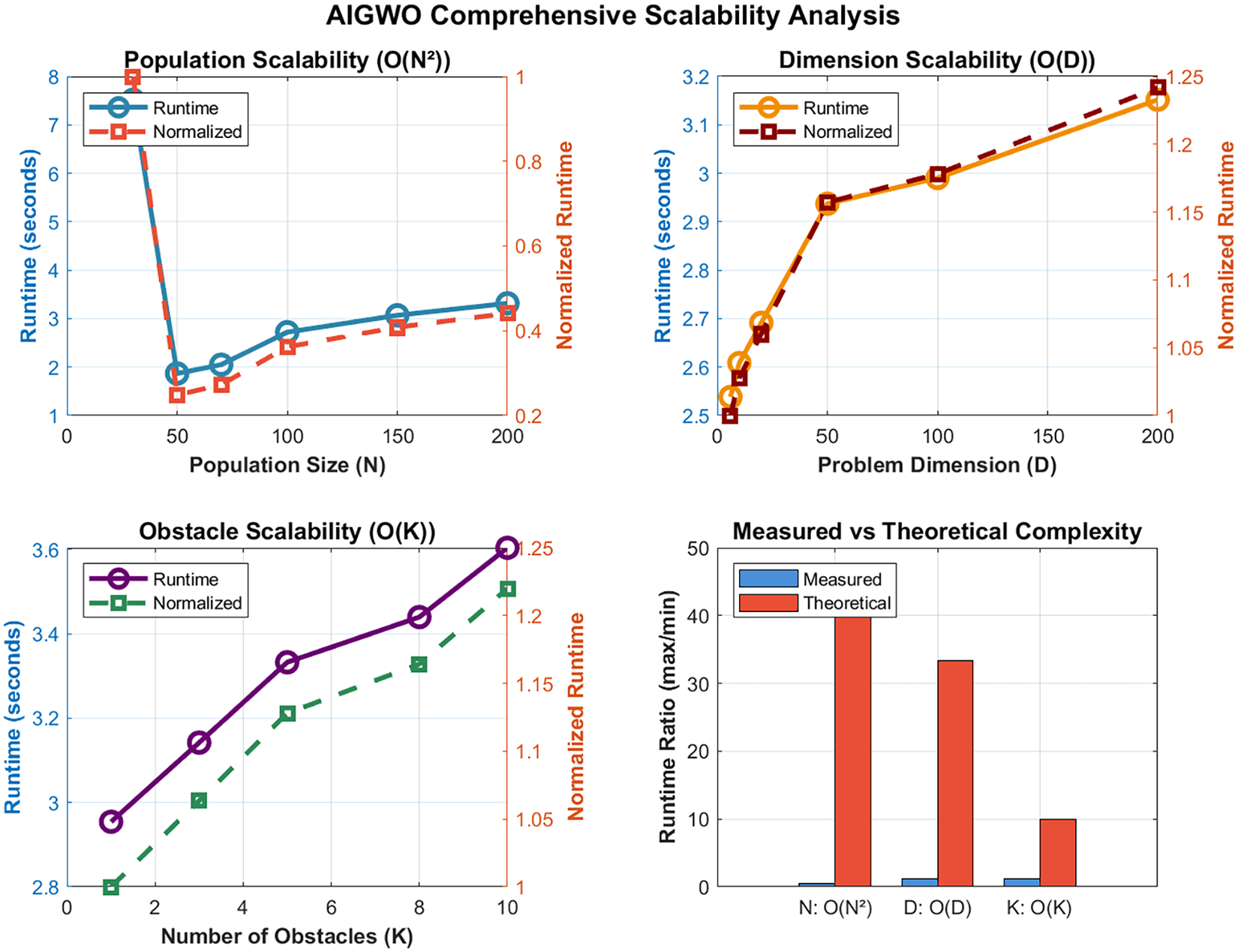
AIGWO comprehensive scalability analysis.
In summary, AIGWO demonstrates predictable and manageable scaling behavior: quadratic growth with N and linear growth with D and K. The dominant
Experimental design and result analysis
Experimental environment
All simulation experiments were implemented on the MATLAB R2023b platform, with the spatial dimension of experimental simulation environment configured as 200×200×60. A map model (Figure 5) was established for UAV transportation path planning in complex mountainous areas, incorporating a start point, an end point, mountainous terrain with variable elevations and slopes, and closed cylindrical threat zones. The mountainous terrain was designed to maximize the simulation of real topographical features of mountainous regions.
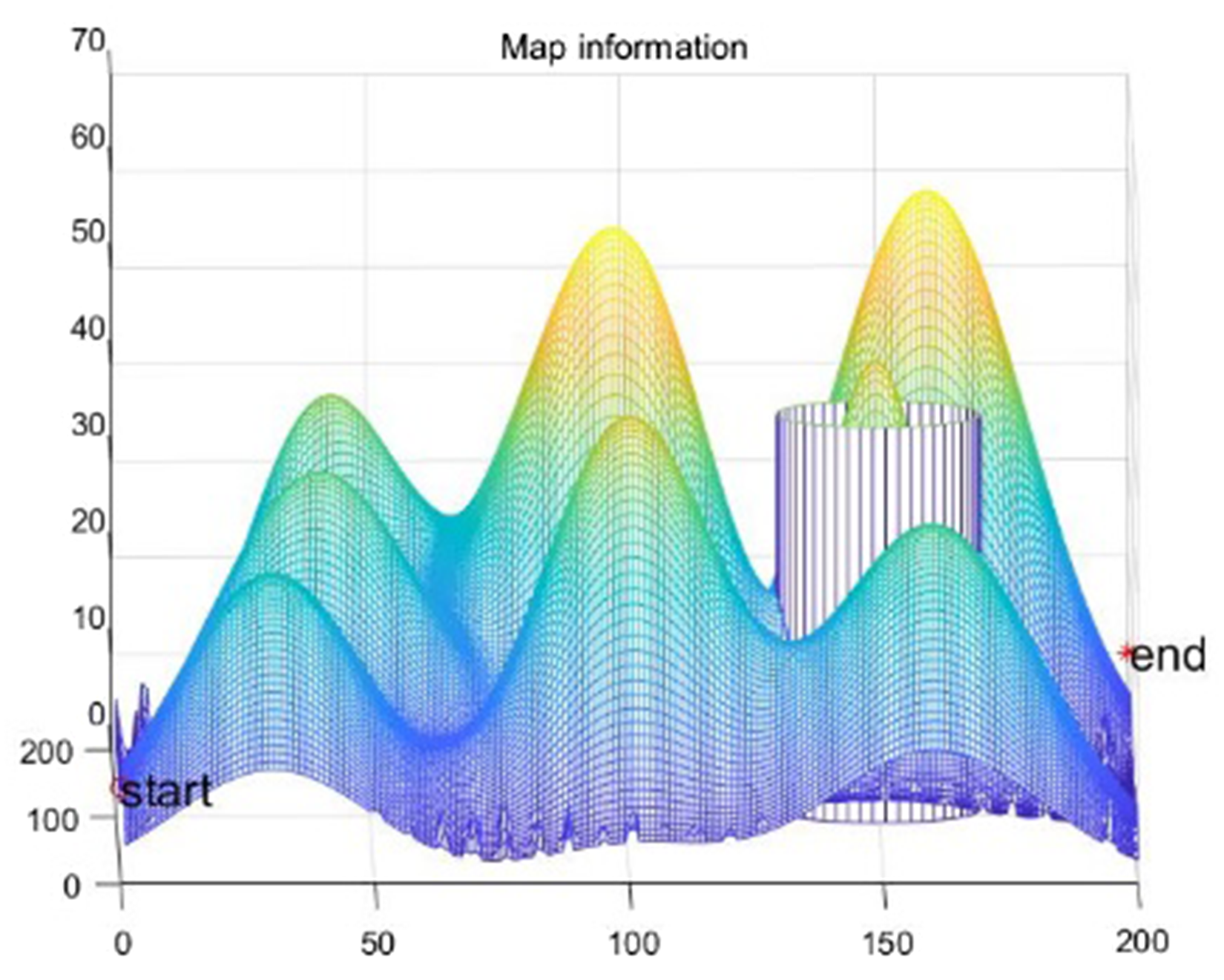
Map model.
The core mission constraint is that the UAV is required to complete the transportation task by navigating from the start point to the end point, with strict avoidance of collisions with mountainous terrain and incursions into threat zones; any collision or intrusion is defined as mission failure. To comprehensively assess the performance of path planning algorithms for UAV transportation in mountainous areas, key evaluation metrics were adopted, including algorithm runtime, total planned path length, algorithm convergence speed, and optimal fitness value.
Parameter sensitivity analysis
To address concerns regarding the additional parameters in AIGWO and to identify optimal values that enhance optimization stability, sensitivity analysis was performed on three key parameters: the decay rate (
For the decay rate (

Parameter sensitivity.

Parameter sensitivity heatmaps.
For the Lévy flight step-size constant (
For the weight parameters (
In summary, the sensitivity analysis determined optimal values for highly sensitive parameters (
Algorithm comparison experiment
To validate the superiority of the AIGWO algorithm for UAV transportation path planning in complex mountainous terrain, comparative simulation experiments were conducted using five benchmark algorithms: GWO, LGWO, IGWO, PSO, and GA. To ensure fair comparability, all algorithms shared the same baseline parameters: 50 iterations, a population size of 70, and were executed over 40 independent runs.
Table 1 summarizes the average results from the 40 independent runs for each algorithm, including key metrics: best fitness, runtime, number of convergence iterations, and path length. These provide a quantitative foundation for comprehensive performance evaluation.
Algorithm data comparison.
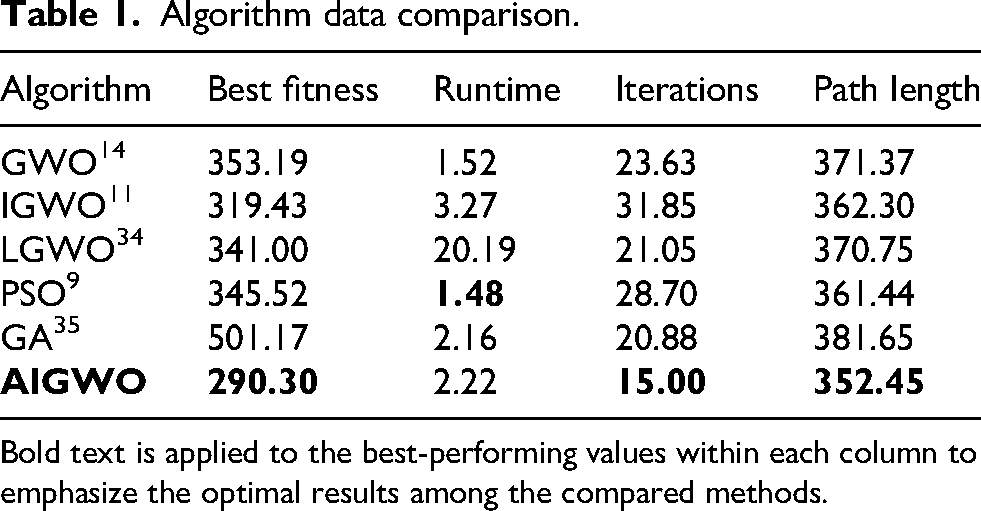
Bold text is applied to the best-performing values within each column to emphasize the optimal results among the compared methods.
Core performance aspects (convergence behavior, solution quality, and computational efficiency) were analyzed using these data, with results visualized in Figures 8 to 12.
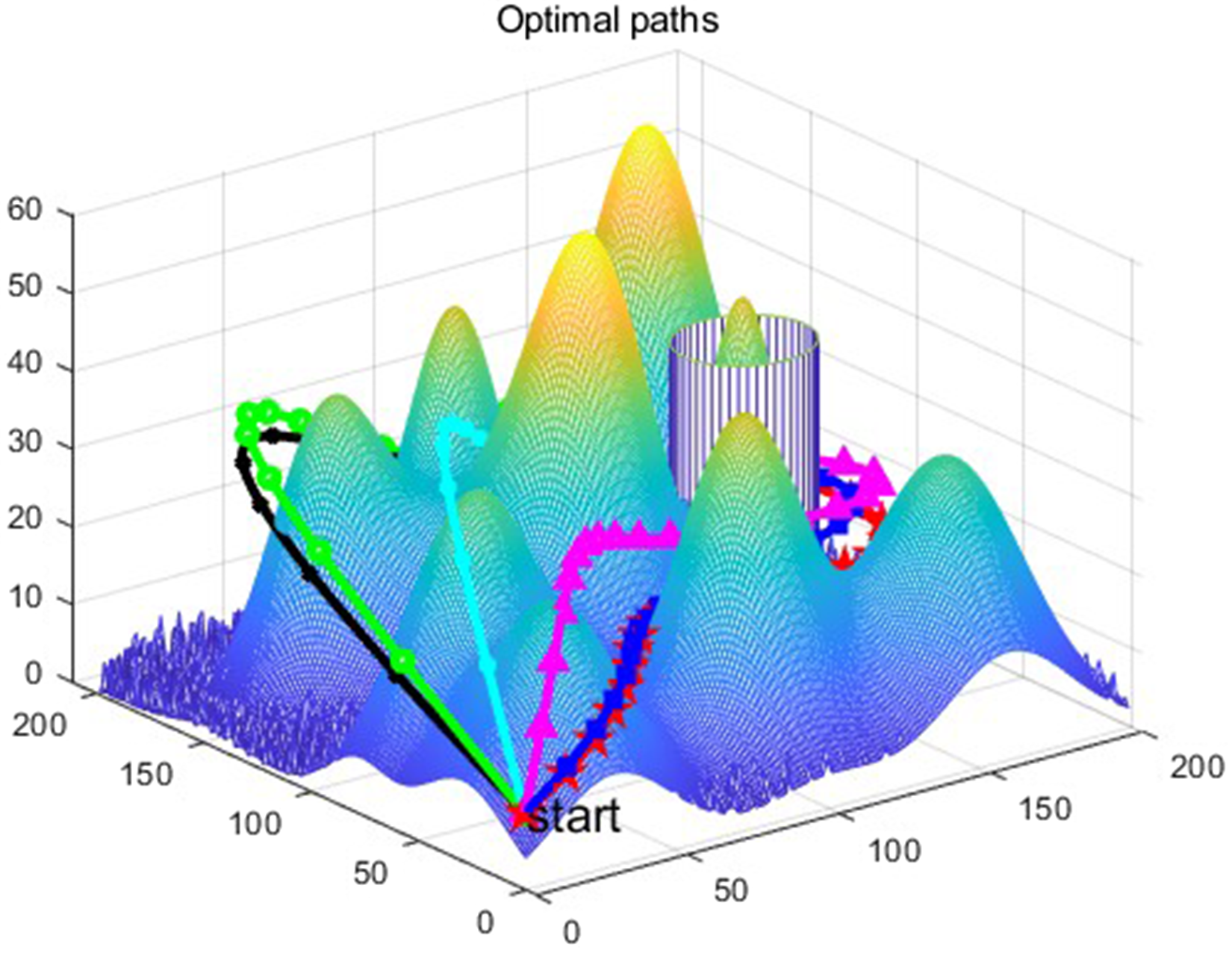
Route planning map.
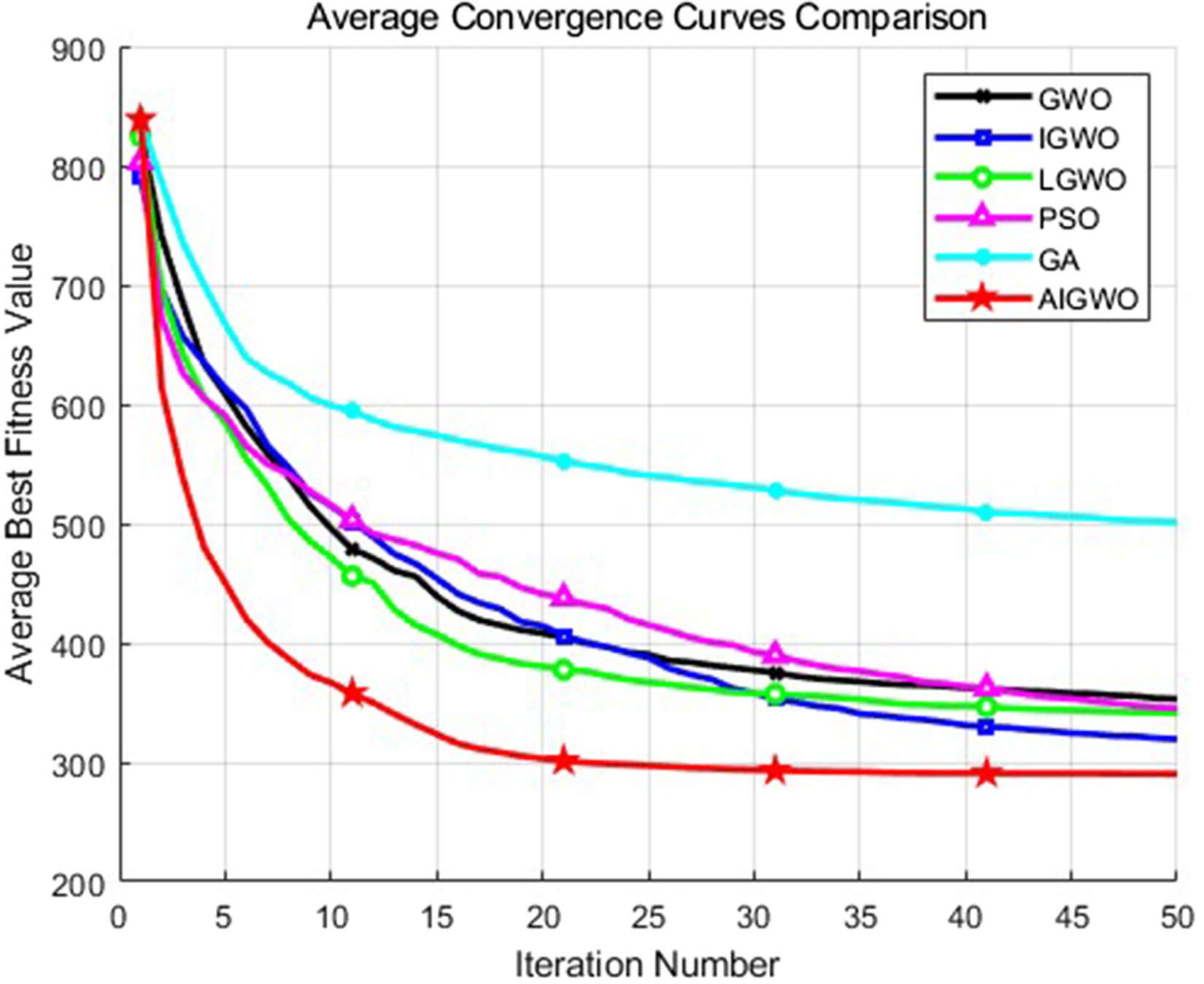
Average convergence curves comparison.

Convergence curves comparison (Run 40).

Distribution of best fitness scores.

Running time distribution.
Convergence Performance: Figure 9 shows the average convergence curves across all test runs. AIGWO exhibits a faster convergence rate and reaches a lower stable best fitness value. Within the first 10 iterations, its average best fitness decreases sharply and stabilizes at a low level, whereas the other algorithms display slower descent trends. Figure 10 presents the convergence curve from the 40th independent run, which closely aligns with the average trend and confirms AIGWO's robust and stable convergence behavior. Quantitatively, Table 1 indicate that AIGWO requires only 15.00 average iterations to stabilize—[36.5%] less than GWO (23.63), [53.0%] less than IGWO (31.85), [28.8%] less than LGWO (21.05), [47.7%] less than PSO (28.70), and [28.1%] less than GA (20.88)—further confirming its superior convergence efficiency.
Solution Quality: Figure 11 illustrates the statistical distribution of best fitness values across all runs. AIGWO shows the lowest median and the most concentrated distribution, indicating superior path optimization capability and result stability. Table 1 further confirms this: AIGWO's average best fitness (290.30) is [17.8%] lower than GWO (353.19), [9.1%] lower than IGWO (319.43), [14.9%] lower than LGWO (341.00), [16.0%] lower than PSO (345.52), and [42.1%] lower than GA (501.17). Regarding path length, AIGWO's average (352.45) is [5.1%] shorter than GWO (371.37), [2.7%] shorter than IGWO (362.30), [5.0%] shorter than LGWO (370.75), [2.5%] shorter than PSO (361.44), and [7.7%] shorter than GA (381.65). Figure 8 visualizes the optimal paths in complex mountainous terrain, where AIGWO generates an obstacle-free, constraint-compliant path of higher quality than those produced by the baseline algorithms.
Computational Efficiency: Figure 12 depicts the runtime distribution across all algorithms. LGWO has a significantly longer runtime (20.19 s) than the others, while AIGWO (2.22 s) is comparable to GWO (1.52 s), PSO (1.48 s), and GA (2.16 s). Even with extra adaptive mechanisms, AIGWO remains efficient enough for practical UAV applications.
In summary, the comprehensive comparative experiments and quantitative analysis demonstrate AIGWO's superiority in convergence speed, path optimization quality, and result stability. Its acceptable computational efficiency further supports its suitability for UAV 3D path planning in complex mountainous environments.
Wilcoxon signed-rank test
To determine whether the performance differences between the proposed AIGWO and the benchmark algorithms (GWO, IGWO, LGWO, PSO, and GA) are statistically significant, the Wilcoxon signed-rank test was performed.
The test treated AIGWO as the reference algorithm; best fitness values from 30 independent runs for each algorithm were used as paired samples. The null hypothesis (
Table 2 presents the descriptive statistics of the best fitness values across all algorithms. AIGWO achieved the lowest mean (284.37) and smallest standard deviation (8.49), suggesting superior and more stable path optimization.
Descriptive statistics of best fitness values.
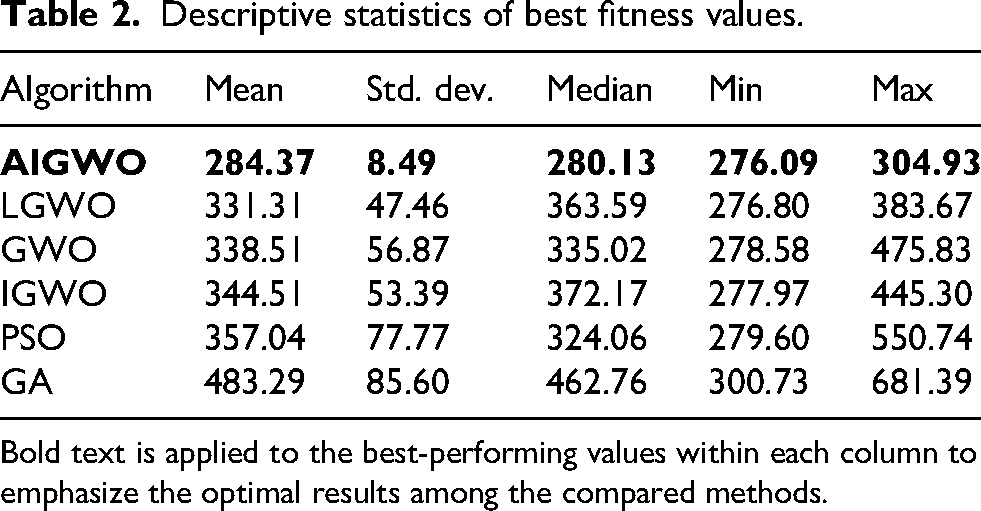
Bold text is applied to the best-performing values within each column to emphasize the optimal results among the compared methods.
Table 3 reports the Wilcoxon signed-rank test results. All Bonferroni-corrected p-values were below 0.01, leading to rejection of
Wilcoxon signed-rank test results.
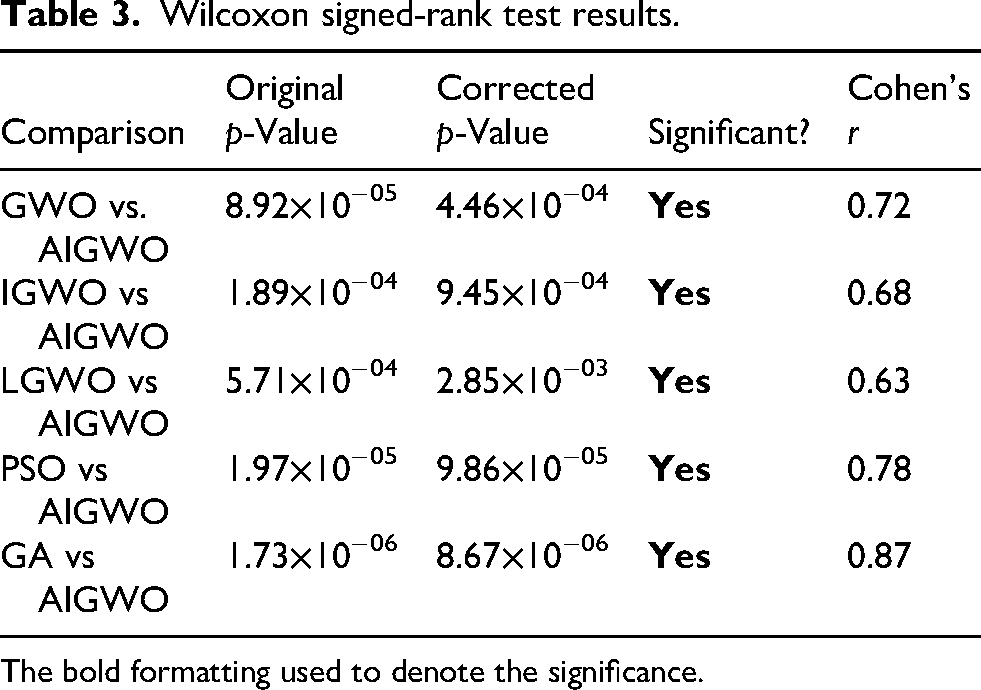
The bold formatting used to denote the significance.
These results provide strong statistical evidence that AIGWO significantly outperforms GWO, IGWO, LGWO, PSO, and GA in path optimization quality (all comparisons significant at the adjusted
Robustness analysis
To investigate the AIGWO algorithm's robustness in complex uncertain mountainous transportation scenarios, experiments were performed via introducing random noise and constructing dynamic obstacle models to simulate real mountainous operational environments. To simulate mountainous terrain uncertainty, Gaussian noise was superimposed on the basic terrain function to align the simulated environment with actual mountainous topographic fluctuations. For dynamic obstacles, mathematical formulas defined multi-modal motion rules of typical mountainous transportation obstacles, including temporary rockfalls and moving vehicles. A high-fidelity, highly customizable dynamic test environment was built to comprehensively evaluate the algorithm's robustness to dynamic changes in these scenarios (Figures 13–16).

Introduction of random noise path figure.

Iterative plot of introducing random noise adaptation values.

Introduction of dynamic obstacle paths figure.

Iterative plot for introducing dynamic obstacle adaptation values.
The experimental data of the AIGWO algorithm tested in three distinct environments (original mountainous map, map with random noise, and map with dynamic obstacles) are presented in Table 4.
Experimental data for testing in three different environments.
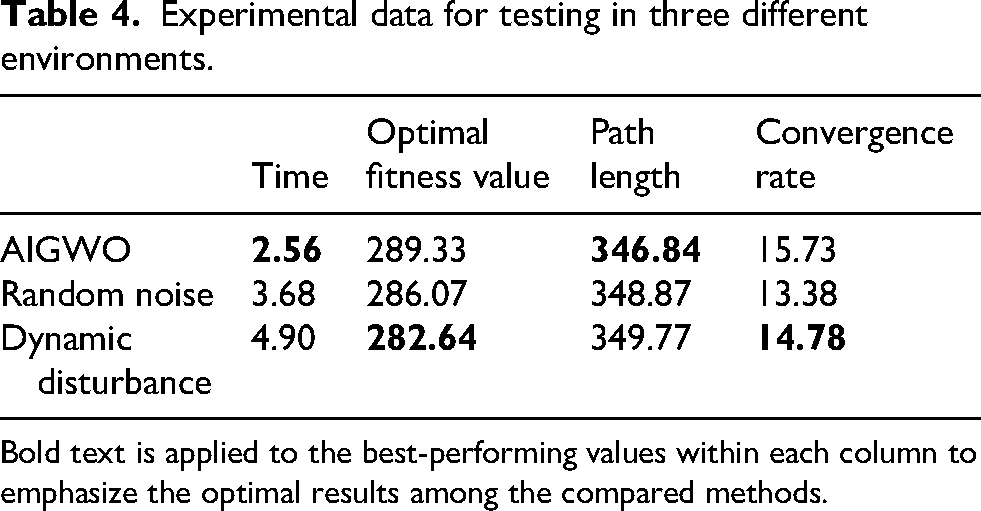
Bold text is applied to the best-performing values within each column to emphasize the optimal results among the compared methods.
Based on the comparative analysis of 40 sets of experimental data, minor fluctuations were observed in the algorithm's performance metrics when random noise and dynamic obstacles were introduced into the mountainous environment. However, all fluctuations were within the acceptable range. Through these experiments, the robust performance of the AIGWO algorithm in complex and uncertain mountainous transportation scenarios was effectively validated.
Summary
To address the challenges in UAV transportation path planning in complex mountainous areas—such as unstructured terrain, dynamic obstacle interference, and the slow convergence and tendency to become trapped in local optima of traditional algorithms—this paper proposes an AIGWO algorithm. The main conclusions are as follows: A 3D spatial model tailored to real mountainous environments and a scientifically designed multi-objective evaluation function were constructed. The 3D model integrates static terrain, dynamic obstacles with multiple motion patterns, and random noise, thereby accurately representing the complex conditions of mountainous transportation. The multi-objective function quantitatively evaluates path quality across three key dimensions: path length (for energy efficiency), flight altitude (for safety), and turning angle (for flight stability). The weight configuration (
Future work may focus on integrating deep reinforcement learning to develop an intelligent waypoint prediction model, further enhancing path planning accuracy and stability. The algorithm could also be extended to multi-UAV collaborative transportation scenarios to improve coordinated obstacle avoidance and resource allocation efficiency, thereby meeting more demanding mountainous transportation requirements.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Zhengzhou University of Light Industry.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.