
Abstract
Hydraulically driven manipulators face challenges in achieving high-precision tracking control due to their strong nonlinearity, parameter perturbations, and external load disturbances. In response, this article proposes a neural network-based composite control strategy. A radial basis function (RBF) neural network is employed to approximate and compensate for time-varying disturbances. The state-space equations are reformulated to incorporate parameter perturbations as an extended state variable. An Extended State Observer (ESO) is integrated to estimate parameter perturbations for feedforward compensation and observe the system state variables. Subsequently, a composite controller is designed by integrating backstepping and sliding mode control, with the stability of the closed-loop system proven via Lyapunov theory. Finally, simulation results demonstrate that the proposed control strategy exhibits higher control accuracy and superior robustness compared with PID control and traditional neural network-based nonlinear control.
Introduction
Hydraulically driven manipulators, characterized by fast response and high load-carrying capacity, are widely used in heavy-duty machinery applications such as assembly (ships and aircraft), metallurgy, and national defence. 1 However, their nonlinear characteristics, system parameter perturbations, and varying external disturbances pose significant challenges to high-precision tracking control. Therefore, developing control strategies that balance tracking accuracy and robustness is of great significance. Currently, numerous scholars have proposed various solutions, such as feedback linearization control, 2 adaptive control, 3 sliding mode control, 4 iterative learning control, 5 and intelligent control. 6 Although feedback linearization control offers higher accuracy than PID control, it is limited to scenarios with known system parameters and cannot effectively handle parameter perturbations in hydraulic systems. Adaptive control, while capable of addressing system parameter variations, exhibits weak resistance to external disturbances. Traditional sliding mode control, despite its strong robustness, introduces high-frequency chattering due to the switching nature of sign functions; this chattering is further amplified by the high-pressure characteristics of hydraulic systems, accelerating actuator wear and reducing control accuracy. With the advancement of artificial intelligence and machine learning, iterative learning and intelligent control have been extensively studied. While these strategies perform well for repeatedly operating systems, they struggle to meet the high real-time requirements of hydraulic manipulators in complex single-task operations, as heavy data training causes computational delays. The aforementioned methods either struggle to achieve the coordinated suppression of parameter perturbations and load disturbances, or fail to balance the performance between robustness and chattering suppression. Furthermore, the actual velocity signals required for full-state feedback control are difficult to measure. Even if the measurement is approximated via numerical differentiation of position, it will be corrupted in the presence of system noise. Therefore, there is an urgent need to develop a composite control strategy capable of synergistically addressing multisource uncertainties, so as to achieve fast response and high-precision tracking control of hydraulically driven manipulators.
The extended state observer (ESO) features stable observation performance, capable of confining state observation errors within a bounded range in finite time. Its observation process is equivalent to the fast-varying subsystem of the system, 7 enabling it to provide usable velocity signals for controller design. In recent years, ESO has been widely applied in fields such as industrial automation control and computer control. Razmjooei et al. 8 designed a continuous finite-time state observer for electrohydraulic systems to estimate system state variables, ensuring uniformly bounded observation errors. Guo et al. 9 developed an ESO for online observation of disturbances and velocity signals in pump-controlled electrohydraulic servo systems. However, none of them have addressed the impact of time-varying disturbances on system control. In this article, state-space equations are reformulated to incorporate parameter perturbations as an extended state variable. The ESO is enabled to simultaneously achieve feedforward compensation of system parameters and observation of system states. Backstepping sliding mode control (BSMC) can effectively suppress nonlinear factors, characterized by fast response and insensitivity to parameter perturbations. 10 This method explicitly handles the nonlinear structure of the system through the recursive design of backstepping control, thereby decomposing complex nonlinear systems into manageable subsystems. By embedding sliding mode terms into the control law, it compensates for the defect of backstepping control being sensitive to disturbances; meanwhile, the design of virtual control laws provides continuous reference trajectories for the sliding mode surface, reducing chattering. Additionally, this article uses the hyperbolic tangent function instead of the sign function to compensate for neural network estimation errors, further mitigating chattering caused by sliding mode control. In recent years, radial basis function (RBF) neural networks have attracted significant attention from scholars due to their simple structure, strong generalization ability, and universal approximation property. 11 Zhang et al. 12 utilized RBF neural networks to approximate unmodeled dynamics in attitude control systems, achieving effective compensation for model errors and external disturbances. Li et al. 13 employed RBF neural networks for the accurate estimation of the state of charge of lithium-ion batteries, addressing the challenges of real-time estimation and low accuracy in conventional methods. Feng et al. 14 used three groups of RBF neural networks to approximate uncertain parameters in the manipulator dynamics model, thereby further enhancing the motion control accuracy of the manipulator. RBF neural networks are widely applied in system identification and disturbance estimation due to their fast convergence, strong generalization ability and online weight tuning capability. 15
In this paper, the RBF neural network is employed to focus on real-time estimation of time-varying external disturbances, alleviating the limitation of adaptive control in antidisturbance; the ESO is used to compensate for parameter perturbations and observe system states; the backstepping sliding mode serves as a closed-loop control framework, and combined with hyperbolic tangent function, it mitigates the chattering problem of traditional sliding mode control. Through the synergy of the three, fast response and high-precision tracking of the hydraulic manipulator under multisource uncertainties are achieved.
System description
As shown in Figure 1, the multi-degree-of-freedom hydraulically driven manipulator consists of an actuating mechanism (manipulator joints) and a driving mechanism (servo valves, hydraulic cylinders, power sources, etc.). 16 Subsequently, its mechanical dynamics and hydraulic system models are developed.

Multi-degree-of-freedom hydraulically driven manipulator.
The dynamic model of the multi-degree-of-freedom manipulator can be expressed as follows
17
:

The control torque of the manipulator joint can be expressed as equation (2):


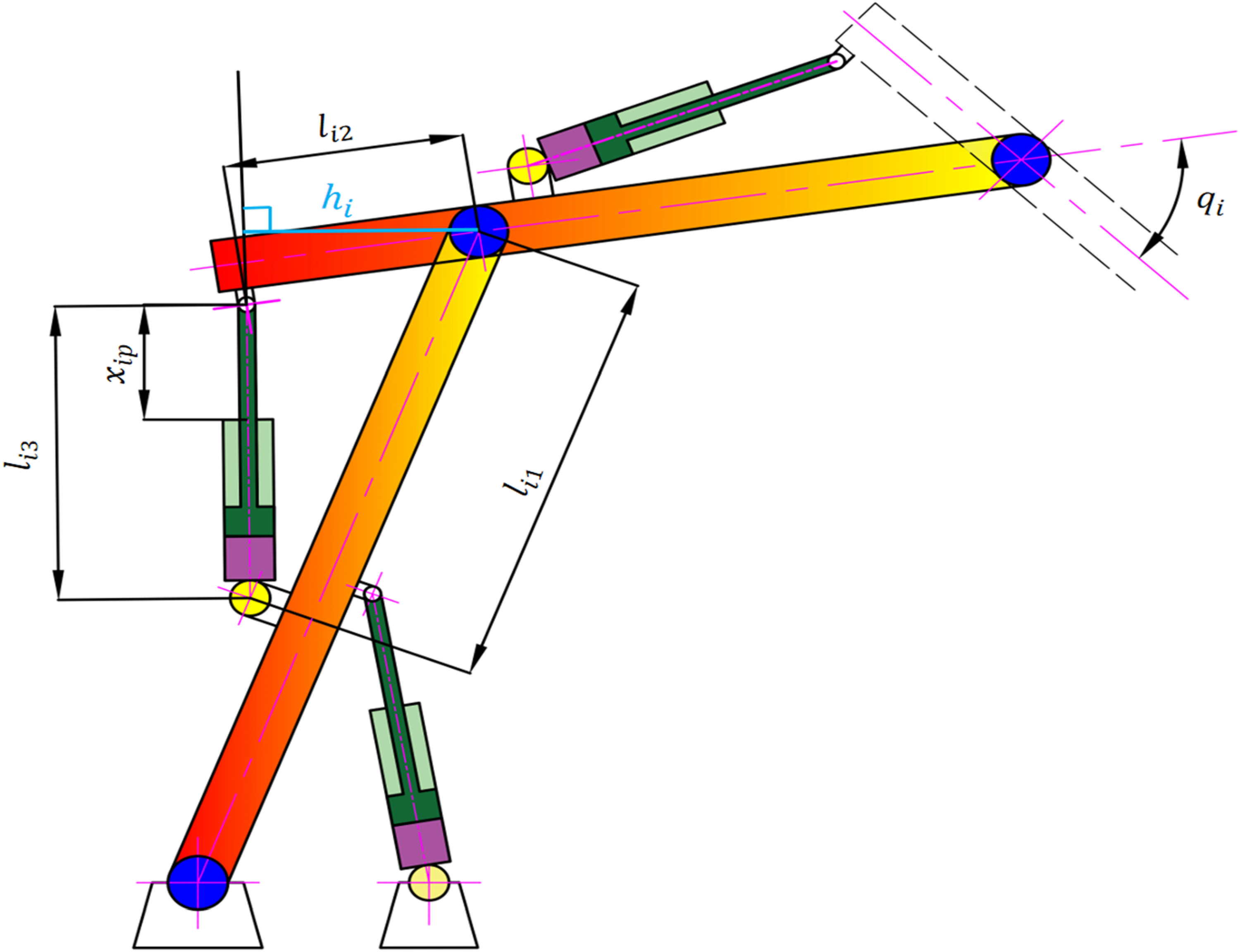
Geometric model of the joint.
The flow continuity equation of the hydraulic cylinder can be described as equation (4):

The velocity vector

Since the response speed of the servo valve is much faster than that of the hydraulic cylinder, there is the following proportional relationship
19
:

The flow equations of the servo valve can be expressed as equation (7):


Define the state variable of the system as

In equation (9),

Controller design
Define the system's uncertain parameters as

The design block diagram of the controller is illustrated in Figure 3.
1. Design of the RBF neural network

Block diagram of the controller design concept.
The RBF neural network adopts a three-layer classical topology, comprising an input layer, a hidden layer, and an output layer, as depicted in Figure 4. The dimension of the input layer matches the number of joint angles

Structure of the radial basis function (RBF) neural network.
Its activation function is the Gaussian function, and the fitting formula is shown as equation (12):

The estimation vector of

Define the estimation error as equation (14):


2. Design of ESO
Let

Based on equation (16), the ESO is designed as equation (17):

Define the state error as

Let


3. Controller design based on backstepping sliding mode
Define the state errors of the system as equation (21):

Define the Lyapunov function

Deriving it yields:

To make

Define the Lyapunov function

Deriving it yields:

Design the virtual control quantity



Define the sliding mode function as equation (30):

All of
Differentiating equation (30), we can get equation (31):

To overcome the chattering problem caused by the discontinuity of the switching function, the


Substitute equations (33) into (32) and then substitute the result into equation (31), we can get equation (34):

Design the weight adaptive law of the RBF neural network as equation (35): 4. Proof of system stability

For the neural network weight error

For the hyperbolic tangent function, the following inequality holds:

Define the final Lyapunov function V as equation (38):

It is straightforward to verify that equation (38) is a positive definite function. By differentiating equation (38), we derive equation (39):

Substitute equations (19), (26), (34), and (35) into equation (39), and then we can get equation (40):

Here, we let


By the properties of the manipulator inertia matrix
20
(i.e.

Applying Young's inequality, equation (41) can be rewritten as equation (44):

where
If appropriate parameters


Let

By applying Lemma 1 and Lemma 2, equation (42) can be rewritten as equation (48):

Define the matrix




Accordingly, equation (48) can be recast into the following form:


In equation (54),
From the above derivation, we establish the inequality:

Finally, by the decomposition
Analysis of the simulation process and comparison of result
Simulation process
To verify the effectiveness of the proposed control strategy, this chapter takes a dual-joint system as an example and establishes a co-simulation platform with MATLAB/Simulink and AMESIM.
The structure of the system's dynamic model is as follows:
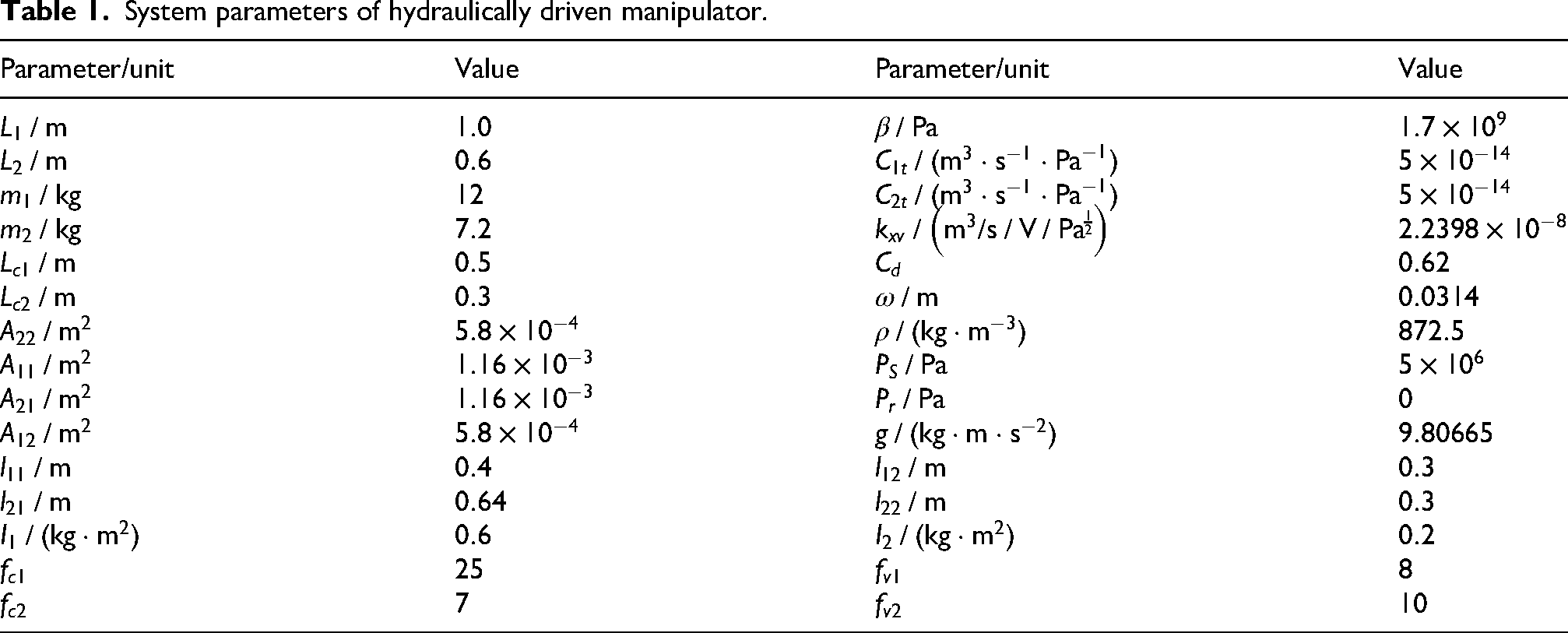
In AMESIM, an external disturbance torque is applied to the model, and the effects of leakage and friction in the hydraulic system on the system performance are considered. In the MATLAB/Simulink model, displacement command signals are input, control algorithms are implemented, and data acquisition is carried out with the acquisition period set to 0.001s. To better approximate real operating conditions, white noise modules are added to each sensor output. Parameters are listed in Table 1.
System parameters of hydraulically driven manipulator.
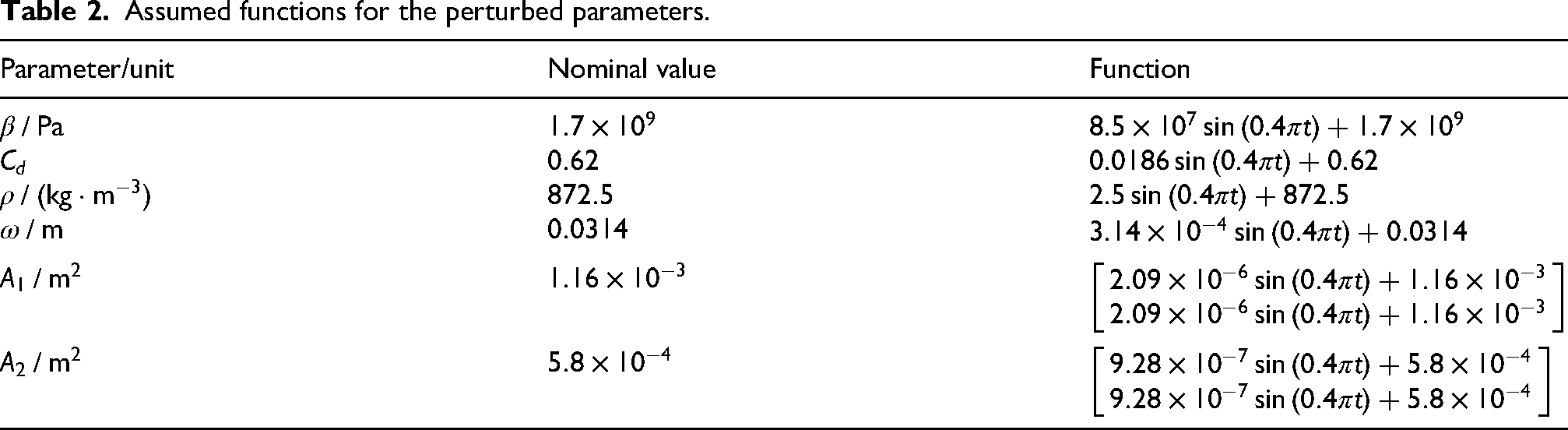
In the simulation, to capture parameter variations under real-world conditions, all system parameters prone to perturbation are assumed to be sinusoidal functions. For example, the spool valve opening
Assumed functions for the perturbed parameters.
Simulation parameters for controllers are selected as below.
For C2, if ESO is not used to observe system states, the expanded state variable 
As for C3, the input of the RBF neural network in C3 is
The selection of m, the number of hidden layer nodes in the RBF neural network, needs to simultaneously consider disturbance approximation accuracy, real-time computing efficiency, and system stability. This aims to avoid excessive approximation error caused by an overly small m, as well as overfitting or computational delay caused by an overly large m. In this paper, 
Firstly, m is determined by the empirical formula
When
Considering the real-time requirement in this article (control period of 1

Performance comparison chart of hidden layer node counts.
Performance comparison of hidden layer nodes.
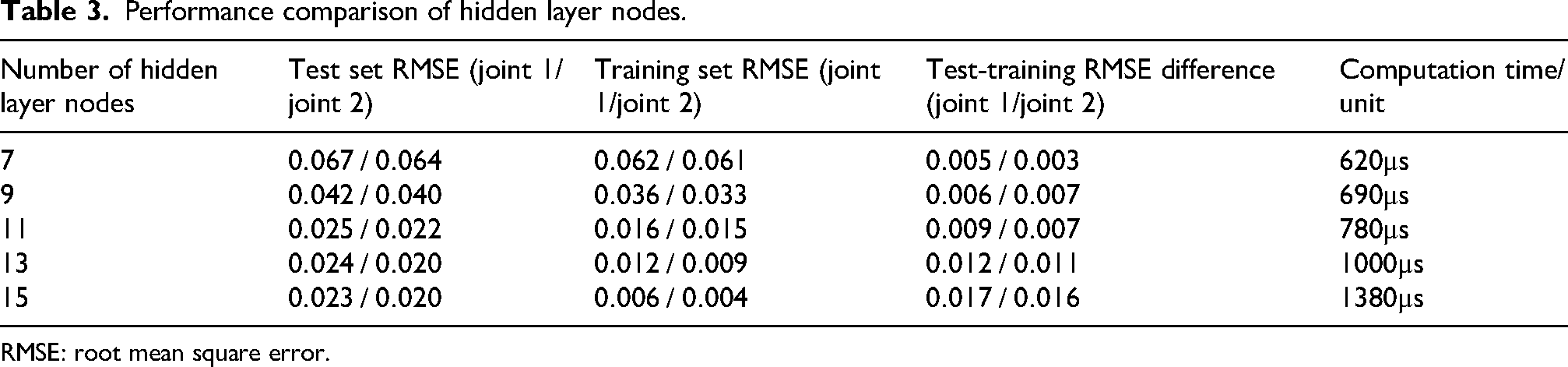
RMSE: root mean square error.
Stability verification: overfitting (excessively large
When
To conclude, based on the aforementioned performance comparison, the number of hidden layer nodes for the RBF neural network is determined as 11, and its structure is 4-11-2.
The kernel width of the neural network is designed using the average distance method, with the design formula:
After extensive simulation and tuning, the parameters of the ESO are selected as follows:
The bandwidth of the ESO
The characteristic equation of the fourth-order ESO is given by:
However, the hydraulic system exhibits strong nonlinearities (e.g. flow-pressure coupling and frictional nonlinearity). Directly applying the ideal gains leads to a 12% overshoot in the observation error. Considering the slight delay in the spool displacement response of the hydraulic servo valve, excessively high
To match the pressure response speed of the hydraulic cylinder and guarantee the observation accuracy of the actuator output force
To verify the stability of the parameter selection, frequency domain margin analysis and root locus analysis can be employed to ensure the system has no overshoot and no instability risk. The specific results are as below.
Gain margin: 8.2 dB (
According to the convergence design criterion of the ESO based on bandwidth, its stability is determined by the pole locations of its error system. The more negative the real part of the pole (i.e. the larger its absolute value), the faster the convergence speed and the more sufficient the stability margin. By plotting the root locus of the ESO's characteristic equation, under the current parameters
The remaining control parameters are selected as
The initial joint angles are given by 
Test 1: During the operation of a hydraulic manipulator, joints perform periodic reciprocating motions (e.g. repetitive swings). This leads to periodic variations in inertial, Coriolis, and centrifugal forces, thereby subjecting the joints to periodic dynamic disturbances. To verify the controller's disturbance rejection capability, sinusoidal disturbances (which simulate the aforementioned periodic dynamic disturbances) are adopted, as defined in equation (56).
The tracking results of the three controllers are shown in Figures 6 and 7, and the tracking errors are presented in Figures 8 and 9. As can be observed from the figures, under the conditions of considering joint friction, external disturbances, and hydraulic cylinder leakage. For C1, tracking oscillation occurs during the system startup phase, with the maximum tracking error reaching 1.768° and 1.13°. After 0.68 to 0.7 s, it enters a relatively stable tracking state; however, notable periodic tracking errors (

Tracking curve of joint 1 (test 1).

Tracking curve of joint 2 (test 1).

Tracking error curve of joint 1 (test 1).

Tracking error curve of joint 2 (test 1).
Figure 10 illustrates the estimation of time-varying disturbances

Estimation of system disturbances by the radial basis function (RBF) neural network (test 1).
Figures 11 to 13 show the ESO's estimations of the joint angular velocity

Observation results of

Observation results of

Observation results of
Test 2: To further verify the control performance of the proposed control method, the desired joint angles and initial system state are kept unchanged. During the simulation, uniformly distributed random noise within the range of
Figures 14 and 15 present the tracking curves for the two joints. When the external disturbance is replaced with an aperiodic noise signal and a sustained step signa, the tracking performance of the three controllers deteriorates to varying extents relative to test 1—all three schemes exhibit slight chattering.

Tracking curve of joint 1 (test 2).

Tracking curve of joint 2 (test 2).
Notably, controller C1 is impacted most severely (with the most pronounced chattering), showing persistent oscillations and nonuniform tracking errors across the entire operation. During the system startup phase, the maximum tracking errors peak at 2.061° (joint 1) and 2.100° (joint 2), accompanied by an oscillation duration of 0.8 to 1 s. Oscillations intensify at actuator commutation instants, leading to further enlarged tracking errors. At t = 5 s, when a step disturbance torque is abruptly applied to both joints, the instantaneous maximum tracking errors surge to 0.94° (joint 1) and 1.32° (joint 2); the settling time required to re-establish a steady state is 0.4 s (joint 1) and 0.2 s (joint 2). In summary, controller C1 demonstrates a limited level of robustness, the poorest tracking accuracy and the longest oscillation duration among the three control schemes.
Controller C2 exhibits superior overall tracking performance compared to C1. Despite a slight lag during the startup phase, it rapidly converges toward the desired angle within 0.3 s, and its oscillation amplitude remains notably smaller than that of C1 across the entire operation. At actuator commutation instants, the tracking error is constrained to a fluctuation range of 0.26° to 0.42° for both joints. Upon application of the step disturbance torque to both joints, the instantaneous tracking errors measure 0.40° (joint 1) and 0.51° (joint 2), with settling times of 0.34 s (joint 1) and 0.17 s (joint 2) required to re-establish steady state. In summary, C2 outperforms C1 in terms of both tracking accuracy and disturbance rejection capacity.
Controller C3 maintains the most robust stability: following system startup, it rapidly locks onto the desired signal, with an exceptionally low oscillation amplitude (0.03°–0.12°) sustained throughout operation. Upon application of the step disturbance torque, the resulting tracking errors are merely 0.11° (joint 1) and 0.24° (joint 2), and the associated settling time is the shortest of the three controllers—joint 1 experiences only negligible oscillation and reverts to steady state almost instantaneously, whereas joint 2 requires 0.16 s to settle. These results indicate that, under aperiodic disturbances, C3 retains the highest control precision and strongest robustness among the evaluated controllers.
Figure 16 presents the approximation results of the RBF neural network for external disturbance torques. From Figure 16, while the neural network does not perfectly capture the exact values of the disturbance torques, it effectively tracks the overall variation trend—thereby mitigating the impact of random noise and step disturbances on tracking performance. However, compared to its performance in test 1, the RBF neural network exhibits limitations in disturbance estimation: it cannot precisely compensate for the effect of disturbances on the joints, which is one of the factors contributing to the degraded tracking accuracy in test 2.

Estimation of system disturbances by the radial basis function (RBF) neural network (test 2).
Figures 17 to 19 present the observation results of the ESO for the system state variables. From the figures, the ESO still achieves satisfactory observation performance for the system variables, providing accurate and low-noise state variables to support controller design.

Observation results of

Observation results of

Observation results of
To further evaluate the control performance of the three controllers, three metrics are adopted in this article: maximum absolute error (MaxAE), mean absolute error (MAE), and standard deviation of absolute error (SAE), with their expressions given in equations (58) to (60). To eliminate the randomness of single-simulation results and verify that the tracking accuracy improvement of the proposed control method in this article is genuine and effective, 10 independent repeated simulations are conducted for each controller under the two disturbance scenarios (tests 1 and 2). Key conditions (e.g. initial conditions and control signals) are kept identical across all simulations to ensure a fair comparison, while each simulation is run independently to guarantee the statistical independence of the samples. For each controller-joint-performance index (



Performance index comparison chart of each controller (test 1).

Performance index comparison chart of each controller (test 2).
Performance evaluation indices comparison.
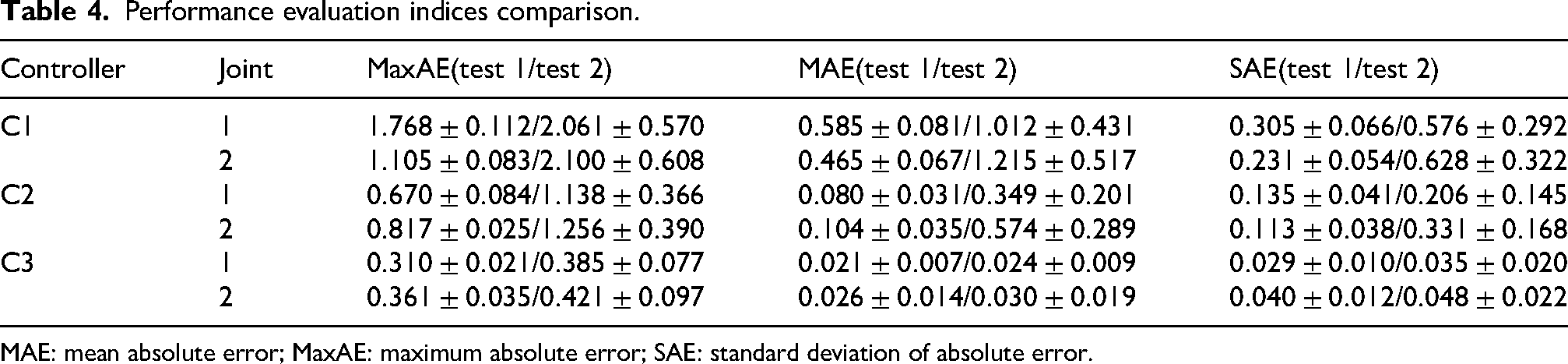
MAE: mean absolute error; MaxAE: maximum absolute error; SAE: standard deviation of absolute error.
For the
Regarding the MAE, the performance of C3 for joint 1 is improved by 96.41% and 73.75% in test 1, 97.63% and 66.16% in test 2 compared to C1 and C2; for joint 2, the improvements are 94.48% and 75.22% in test 1, 97.53% and 94.77% in test 2. This demonstrates that the smaller MAE of the proposed method indicates lower overall control deviation during long-term operation, thereby enabling the proposed method to achieve the highest long-term accuracy among the three methods.
For the
Analysis of comparative simulation results
As a classic linear controller, C1 generates the control output solely through the proportional (P), integral (I), and derivative (D) terms of the tracking error; essentially, it relies on feedback control based on the “input-output black-box characteristics” and completely ignores the nonlinear coupling characteristics 23 (such as dynamic coupling between joints and nonlinear flow-pressure relationship) and time-varying parameter characteristics (such as changes in inertial parameters caused by load variation) of the hydraulic manipulator. Therefore, under the combined effect of periodic disturbances and strong system nonlinearity, C1 is prone to problems including slow response speed, large overshoot, and difficulty in eliminating steady-state errors, with both poor antidisturbance capability and low robustness. These issues are intuitively manifested in the simulation as low trajectory tracking accuracy and obvious fluctuations in the dynamic adjustment process, making it difficult to meet the high-precision trajectory tracking requirements of the hydraulic manipulator.
By leveraging the recursive design concept of backstepping control, C2 gradually stabilizes each subsystem by constructing virtual control laws, and addresses nonlinearities by utilizing the inherent robustness of sliding mode control. Meanwhile, the RBF neural network can approximate the unknown nonlinear components of the system—a capability that theoretically enhances its adaptability to system complexity. However, due to the lack of state observation from the ESO, the system states can only be measured by relying on physical sensors (e.g. angular velocity sensors and pressure sensors). The inevitable measurement noise of sensors will directly corrupt state information, thereby exacerbating the high-frequency chattering of sliding mode control. Furthermore, since the extended state reflecting unmodeled dynamics is unmeasurable, the controller is designed only using the nominal values of system parameters, without considering the time-varying perturbations of leakage and friction coefficients in the hydraulic system, or the dynamic variations of the manipulator's inertial parameters with its posture. When the actual parameters deviate from the nominal values, the approximation error of the neural network and parameter mismatches will jointly lead to a decline in control accuracy. Therefore, although its control performance is significantly improved compared with C1, there still exist chattering phenomena and non-negligible steady-state errors—meaning C2 fails to eliminate chattering or reduce steady-state errors to negligible levels.
Based on the control framework of C2, C3 incorporates an ESO to estimate system states and total parameter perturbations in real time. On the one hand, the observed states provided by the ESO can replace sensor measurements that are susceptible to noise corruption, supplying cleaner and more accurate feedback information for the recursive design of BSMC, thus suppressing noise-induced chattering at the root. On the other hand, the ESO's estimation of parameter perturbations can be directly incorporated into the control law through feedforward compensation, thereby proactively counteracting the impact of parameter perturbations and external disturbances on the system. These two improvements enable the controller to achieve fast response speed, small overshoot, and high-precision trajectory tracking even under complex operating conditions—in which a precise mathematical model is unknown, sensor noise exists, and parameters are time-varying.
Compared with test 1, the tracking accuracy of test 2 decreases to a certain extent. The reasons for this phenomenon are analyzed from two perspectives: physical characteristics and control theory, as below.
Periodic sinusoidal disturbances in real scenarios mainly stem from periodic load variations—such as inertial load fluctuations when the manipulator repeatedly executes the same trajectory, pump pressure pulsations, and the periodicity of joint friction. These disturbances are characterized by fixed frequency and predictable amplitude. By contrast, random noise has more complex and irregular sources, including sensor measurement noise, turbulent noise of hydraulic fluid (caused by the irregular flow of high-pressure oil at valve ports and in pipes), and external random disturbances (e.g. collisions in the working environment and sudden load changes). Such noise is defined by aperiodicity and randomness.
The hydraulic system inherently exhibits characteristics like nonlinear dead zone, fluid compressibility, and frictional nonlinearity. These properties interact with different disturbances to produce a superposition effect, which is further amplified under random noise. This serves as one of the core physical inducements for the degraded tracking accuracy. When confronting periodic disturbances, the system's nonlinearity enables the formation of a stable disturbance-response mapping via the regularity of the disturbances. However, for random noise, its irregularity continuously disrupts this stable mapping; when combined with the hydraulic system's nonlinearity, this leads to issues including joint chattering, increased instantaneous errors, and fluctuations in steady-state errors.
From the perspective of control theory and the practical performance of the RBF neural network: its core advantage lies in high-precision approximation of continuous, smooth, and regular nonlinear functions, but it faces distinct constraints in real applications. Since the input–output mapping of disturbance signals is repetitive and regular, the RBF network converges to stable approximation accuracy after only a small number of iterations. In contrast, the input–output mapping of random noise lacks any regularity—fully approximating it would require an infinite number of radial basis nodes, which is engineering-impractical. In real-time control, the RBF's weight update speed (based on the gradient descent method) cannot match the instantaneous changes of noise; additionally, the high-frequency components of noise exceed the RBF's approximation bandwidth, resulting in unavoidable estimation errors. Thus, the RBF network cannot accurately estimate random noise. The resulting estimation errors lead to an insufficient compensation term, so uncompensated noise acts directly on the joints, causing the decline in tracking accuracy.
Discussion on the computational complexity and real-time feasibility
The computational complexity of the proposed composite control strategy is determined by three core modules: RBF neural network, fourth-order linear ESO, and BSMC, and it is overall at a low level feasible for industrial applications. The RBF neural network adopts a 4-11-2 structure, with computations including forward propagation (involving 4-11 input-hidden layer weight multiplications, 11 Gaussian activation function calculations, and 11-2 hidden-output layer weight multiplications) and weight update (based on gradient descent adaptive law, requiring outer product calculation of 2-dimensional output error vector and 11-dimensional hidden layer activation output vector, plus weight correction with learning rate). The total operations of the RBF module are only several hundred per control cycle. The fourth-order linear ESO relies on fixed-structure linear matrix operations for state prediction and update, involving only basic arithmetic operations without additional overhead, despite its order-related computation volume. The BSMC is derived from the system model, observer output, and RBF approximation results, with computations limited to algebraic operations and sliding surface derivative solution, which leads to no significant increase in computational complexity.
Mainstream standard industrial hardware (e.g. Intel Core i5/i7 industrial computers, STM32H7 series embedded controllers) generally has a single-core clock frequency of 1 to 2 GHz, with each basic arithmetic operation taking only 1 to 2 ns. Even with a conservative estimate—1000 basic arithmetic operations plus 50 complex operations such as activation function/gradient calculation—the total theoretical time consumption of the proposed algorithm is only 50 to 100 ns. This is far below the 1ms target, leaving sufficient time margin to cope with additional overheads like system communication and I/O delays. Thus, the algorithm has low overall computational load and theoretically meets the real-time requirements of industrial hardware.
However, the algorithm has the potential limitations: For 6-DOF robotic arms, the input dimension of the RBF increases to 12, leading to higher computational latency, which necessitates subsequent model order reduction or hardware acceleration.
In future work, we will establish a physical platform for a two-joint hydraulic manipulator, validate the performance of the proposed strategy under actual working conditions, and explore the control optimization of a 6-DOF manipulator based on model order reduction.
Conclusion
In summary, this article proposes a composite control strategy that integrates the ESO, RBF neural network, and BSMC. Through the mutual complementarity among these modules, it effectively overcomes the limitations of traditional control methods (i.e. insufficient accuracy and weak robustness) in scenarios with unknown models and multisource disturbances. Based on extensive simulations, the following conclusions are drawn:
ESO effectively achieves accurate observation of system states, thus providing accurate, low-noise state information for controller design. Furthermore, by reconstructing the system model and enabling state observation of parameter perturbations, the ESO directly provides feedforward compensation for the servo valve's control input—significantly enhancing the control precision of the servo valve and laying a foundation for the overall system's stability. The RBF neural network effectively updates network weights through online learning, which enables accurate estimation of time-varying disturbances. This delivers reliable disturbance information to the controller's disturbance compensation module, effectively suppressing the adverse impacts of time-varying disturbances on system performance and complementing the ESO's capability in handling unmodeled dynamics. For the hydraulically driven manipulator system, the proposed control strategy exhibits higher control accuracy and stronger robustness compared with PID control and the traditional neural network-based BSMC. This advantage is particularly prominent under complex operating conditions (e.g. unknown precise mathematical models, sensor noise, and parameter perturbations), as the synergistic integration of ESO's state observation, RBF's disturbance estimation, and BSMC's nonlinear regulation enables the strategy to address multisource uncertainties comprehensively.
Footnotes
Acknowledgements
Thanks to the School of Mechanical Engineering of Shenyang University of Technology for the support to this study. Thank you for the help of my peers in the research. Finally, thank the reviewers and editors for their valuable comments, so that the content of the article more complete.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.