
Abstract
This paper proposes a predefined-time tracking control methodology for a class of nonlinear mechanical servo systems operating in the presence of the external disturbances and system uncertainties. The process begins with the creation of a nonlinear disturbance observer aimed at accurately estimating the lumped disturbance. This observer is designed to ensure that the error in estimation converges towards zero in a time specified by the user. Following this, a new predefined-time sliding-mode surface is presented, which guarantees that the closed-loop system adheres to predefined-time performance while avoiding potential singularities. Leveraging this manifold, a continuous control law is formulated to impose a predefined-time constraint upon the sliding dynamics, guiding the system states into a designated vicinity of the sliding surface within a specified finite duration. This approach eliminates the need for discontinuous switching components, effectively reducing the chattering phenomenon. A rigorous theoretical framework confirms that the proposed control strategy achieves global predefined-time stability. Lastly, extensive numerical simulations validate the effectiveness and enhanced performance of the proposed strategy.
Keywords
Introduction
The performance of high-precision mechanical servo systems, essential in areas such as precision manufacturing and optical engineering, often faces challenges due to a combination of external disturbances and uncertainties in internal parameters.1,2 These detrimental factors can significantly impair positioning accuracy, highlighting the urgent need for the development of high-fidelity, robust control systems as a key research focus. In response to this challenge, a variety of sophisticated nonlinear control methods has emerged, which include adaptive compensation techniques,3,4 robust control frameworks,5,6 and intelligent algorithms.7,8 These methods are designed to alleviate the impact of combined uncertainties and friction. A notable accomplishment across these approaches is their capability to ensure that the tracking error is uniformly ultimately bounded (UUB), indicating that it converges within a small vicinity of the origin. Nevertheless, a considerable analytical gap remains. The presence of an unmodeled composite disturbance term, inherent to the system dynamics, often causes these strategies to inadequately deliver a precise, quantitative model for assessing the magnitude of steady-state errors or transient response features, including convergence speed.
Disturbance observer-based control (DOBC) is a powerful strategy for enhancing system robustness. By estimating and compensating for lumped disturbances, DOBC effectively mitigates the adverse effects of model uncertainties and external perturbations. Research in DOBC has progressed along several key directions. One major thrust involves integrating disturbance observers into advanced control frameworks. For instance, 9 embeds a disturbance observer within a command-filtered backstepping architecture to simultaneously address inertial uncertainties, external disturbances, and input saturation in attitude control systems. This integrated approach ensures UUB stability while alleviating the “explosion of complexity” inherent in traditional backstepping. Another direction focuses on designing observers for broad classes of disturbances, such as the nonlinear disturbance observer in,10,11 which demonstrates efficacy against both matched and unmatched disturbances. Concurrently, significant theoretical efforts have aimed to improve observer performance while relaxing restrictive assumptions on the disturbance dynamics. The work in 12 exemplifies this by achieving exponential convergence of the estimation error without requiring the disturbance to be smooth or have a decaying derivative—a common prerequisite for Extended State Observers (ESOs).13–15 However, this theoretical advancement has a crucial limitation: for persistently time-varying disturbances with a non-vanishing derivative, the observer only guarantees the estimation error converges to a bounded residual set, rather than achieving predefined-time convergence.
The inherent robustness of sliding-mode control (SMC) against uncertainties has motivated significant research efforts in nonlinear control. A plethora of advanced SMC strategies have been designed16–19 to address systems subject to both internal uncertainties and external disturbances. The development of these methods has centered on enhancing system convergence properties. For instance, while conventional linear SMC (LSMC)20–21 is effective for tracking tasks, its asymptotic convergence restricts its applicability in scenarios demanding rapid response. To achieve finite-time convergence, terminal SMC (TSMC)22,23 were introduced. However, TSMC exhibits a sluggish convergence rate when the system state is far from the equilibrium. This deficiency motivated the development of fast TSMC (FTSMC),24,25 which significantly enhance the convergence speed. Nevertheless, the convergence time of FTSMC remains dependent on the system's initial conditions. Fixed-time SMC26–28 resolved this issue by ensuring the convergence time has an upper bound determined solely by controller parameters, irrespective of the initial state. The process of setting this time, however, can be complex due to the involvement of multiple parameters. Building upon this, predefined-time SMC29–31 methods were proposed to simplify the design, allowing the convergence time to be directly specified via a single parameter. Furthermore, to tackle potential singularity issues arising from negative fractional powers, methods like Nonsingular 32 and Tunable 33 predefined-time SMC have been developed, enabling the pre-setting of convergence time, and offering flexibility in practical implementation.
Despite the above progress, several limitations remain for practical high-precision servo applications. Most existing disturbance observers and ESOs9–15 guarantee only asymptotic or exponential convergence of the estimation error. Advanced SMC schemes16–28 enhance convergence speed from asymptotic to finite-time, fixed-time, or predefined-time regimes. However, the achievable settling time and tracking accuracy are typically coupled with unknown lumped disturbances and modeling uncertainties. As a consequence, the convergence region of the tracking error cannot be quantified explicitly for a given settling time. Moreover, most sliding-mode controllers employ discontinuous switching terms, which induce chattering and may excite unmodeled dynamics. Existing predefined-time SMC methods29–33 still do not account for precise disturbance reconstruction within a user-defined time and therefore cannot simultaneously guarantee disturbance compensation, prescribed transient behavior and steady-state accuracy. Motivated by the above discussion, a predefined-time tracking control strategy is proposed for a class of nonlinear system. The technical contributions of this paper are briefly summarized as follows:
A predefined-time stability lemma is first established and then used to synthesize a nonlinear disturbance observer (PTNDO). Unlike conventional disturbance observers and ESOs,9–15 the PTNDO guarantees that the lumped disturbance estimation error converges to zero within a user-specified predefined time. This feature allows the controller to compensate for rapidly varying disturbances. A nonlinear sliding surface is constructed by embedding the error compensation term into the manifold. This design enforces prescribed tracking precision with predefined-time convergence: the system states are driven into a neighborhood of the manifold within a user-settable time, and the size of the ultimate tracking error set is analytically characterized as an explicit function of the design parameters. In contrast to existing finite-time and fixed-time SMC schemes,22–28 the convergence region is no longer implicit or dependent on unknown disturbances. Leveraging the disturbance estimate provided by the PTNDO, a continuous sliding-mode control law is derived. The proposed control law does not rely on discontinuous sign functions, thereby effectively suppressing chattering while maintaining robustness against model uncertainties and external perturbations. The resulting closed-loop system is rigorously proven to be predefined-time stable.
The rest of the paper is organized as follows. Section “Preliminaries and problem statement” provides the statements of problem and preliminaries. The control design procedure is shown in Section Design of predefined-time control law. In Section Simulation study, the addressed method is applied to ball-plate system and robotic manipulator to test their effectiveness via simulation. Finally, some conclusions are drawn in Section Conclusions.
Preliminaries and problem statement
System description
Consider the following the uncertain mechanical system with actuator faults:

Let

We first present two lemmas that are essential for the subsequent controller synthesis.

From (4), the derivative of


Design of predefined-time control law
To facilitate the analysis of the closed-loop system, the following definition is introduced.




From (7) and

For any

Let

Integrating (12) from 0 to

Hence,

Based on (14), one has

Equation (15) implies that
Disturbance observer design
To compensate the uncertain lumped disturbance
To facilitate disturbance estimation, we first introduce the following auxiliary states:



Construct Lyapunov function:

Taking its time derivative along (18) yields

The differential inequality (20) has the same structure as (7) in Lemma 3. Hence, by repeating the arguments used in (11)–(15), it follows that

Thus, it follows that
Control law design
For the purpose of controller design, we first define the tracking error as





The

where

Consider the Lyapunov function candidate

Taking the time derivative of

For

According to Lemma 3, we can obtain that
It follows from Theorem 1 that as long as the sliding variable
Firstly, we define a new variable as

Then, it follows from (4) and (25) that the dynamics of the variable


The following barrier Lyapunov function

Differentiating

Next, the control input

Substituting (37) into (36), it can be shown that

Based on Young's inequality,
5
we have

Since

Integrating the differential inequality (40) yields the solution for the Lyapunov function:

Recalling the definition of the barrier Lyapunov function (35), Equation (41) implies that

According to the above analysis results, the constraint

From the above control law design, the structure diagram of the control system is shown in Figure 1, and we can state the following theorem.

The control system block diagram.
The sliding variables
The tracking error
Simulation study
Example A:
The efficacy of the proposed controller is demonstrated on a linear motor positioning system governed by the following dynamic model 1 :

Here, the state variables
The model parameters are based on a system with mass Case 1: Case 2: Case 3:
Figures 2–4 depict the system's position tracking response using the proposed controller under three conditions, verifying its capacity for high-speed reference following. This rapid convergence is a direct consequence of the controller's predefined-time stability properties, which also confer significant robustness against composite disturbances. The position tracking error, shown in Figure 5, diminishes rapidly. For the three cases, the error settles into a steady-state residual set bounded by 0.02 for all t > 2 s.

Trajectory tracking under Case 1.
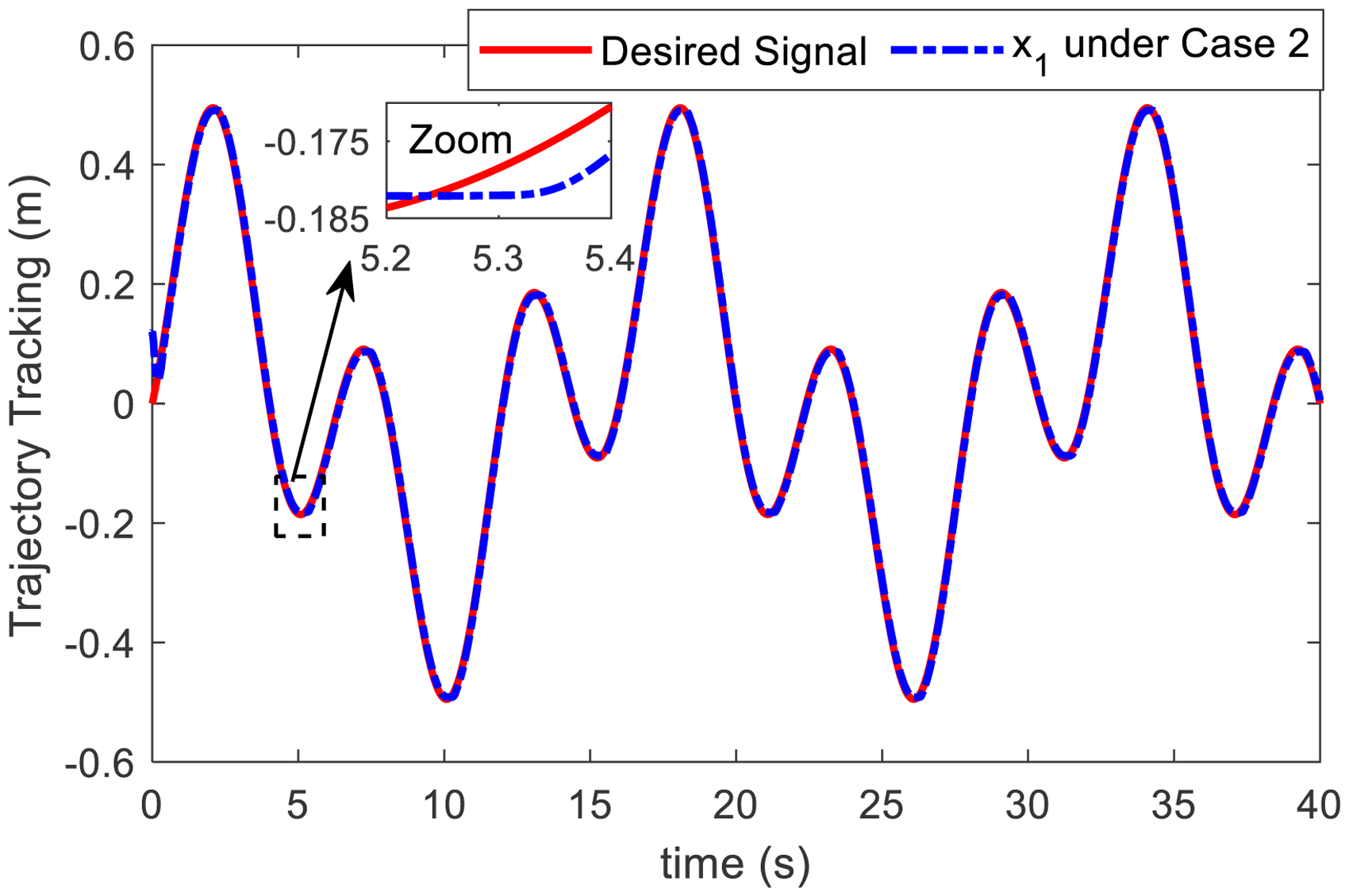
Trajectory tracking under Case 2.
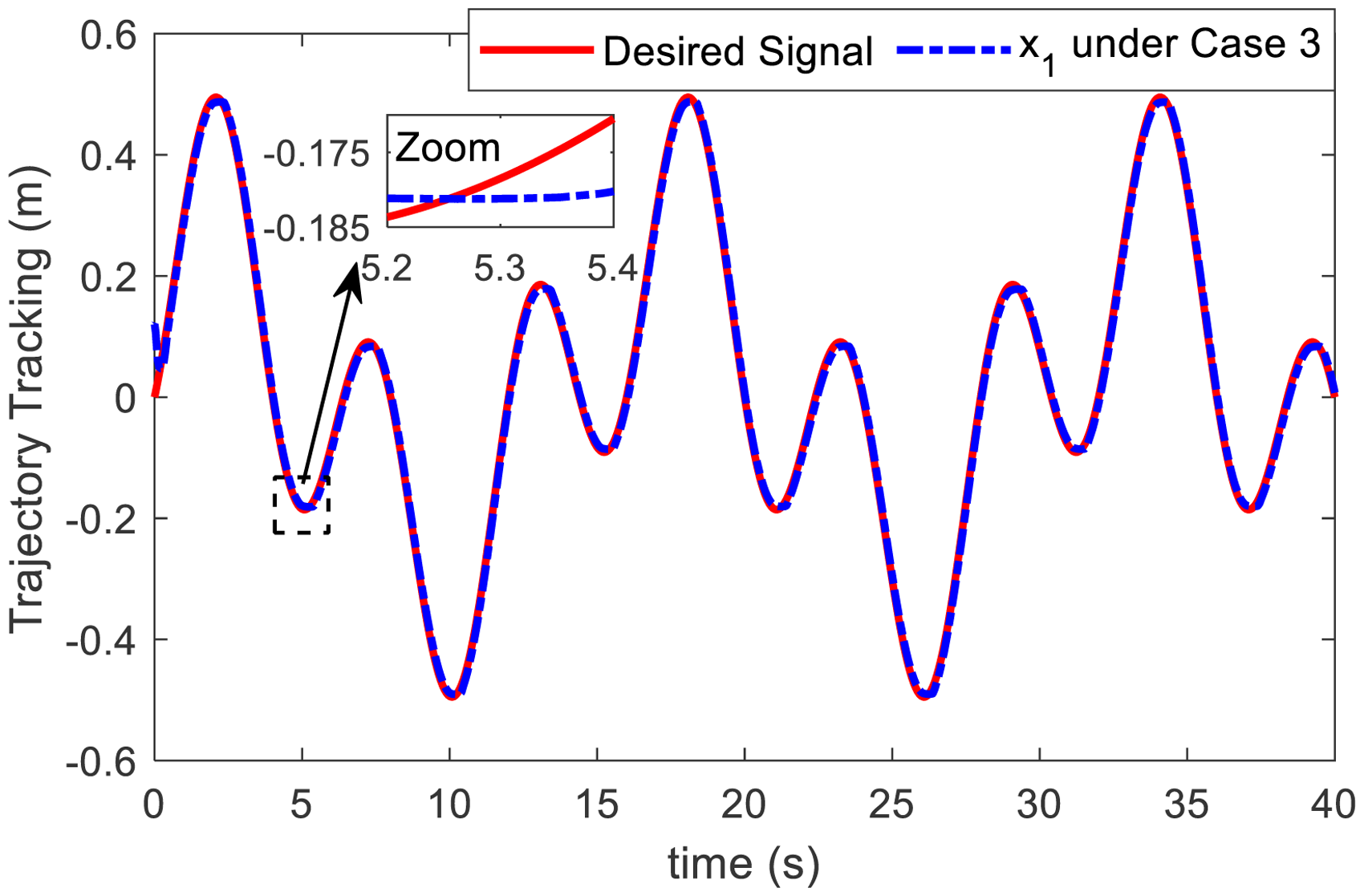
Trajectory tracking under Case 3.

Tracking errors under different cases.
The proposed method's capacity for disturbance rejection is validated in Figures 6 and 7. Figure 6 displays the performance of the disturbance estimation algorithm, confirming its ability to track the temporal evolution of a composite disturbance signal corrupted by stochastic noise. This accurate, online reconstruction enables the control law to generate a timely compensatory action. The resulting control effort is shown in Figure 7. The synergy between the high-fidelity estimation and the compensatory control action is critical, endowing the closed-loop system with enhanced resilience against a broad class of unknown disturbances.

The estimation of the lumped disturbance.
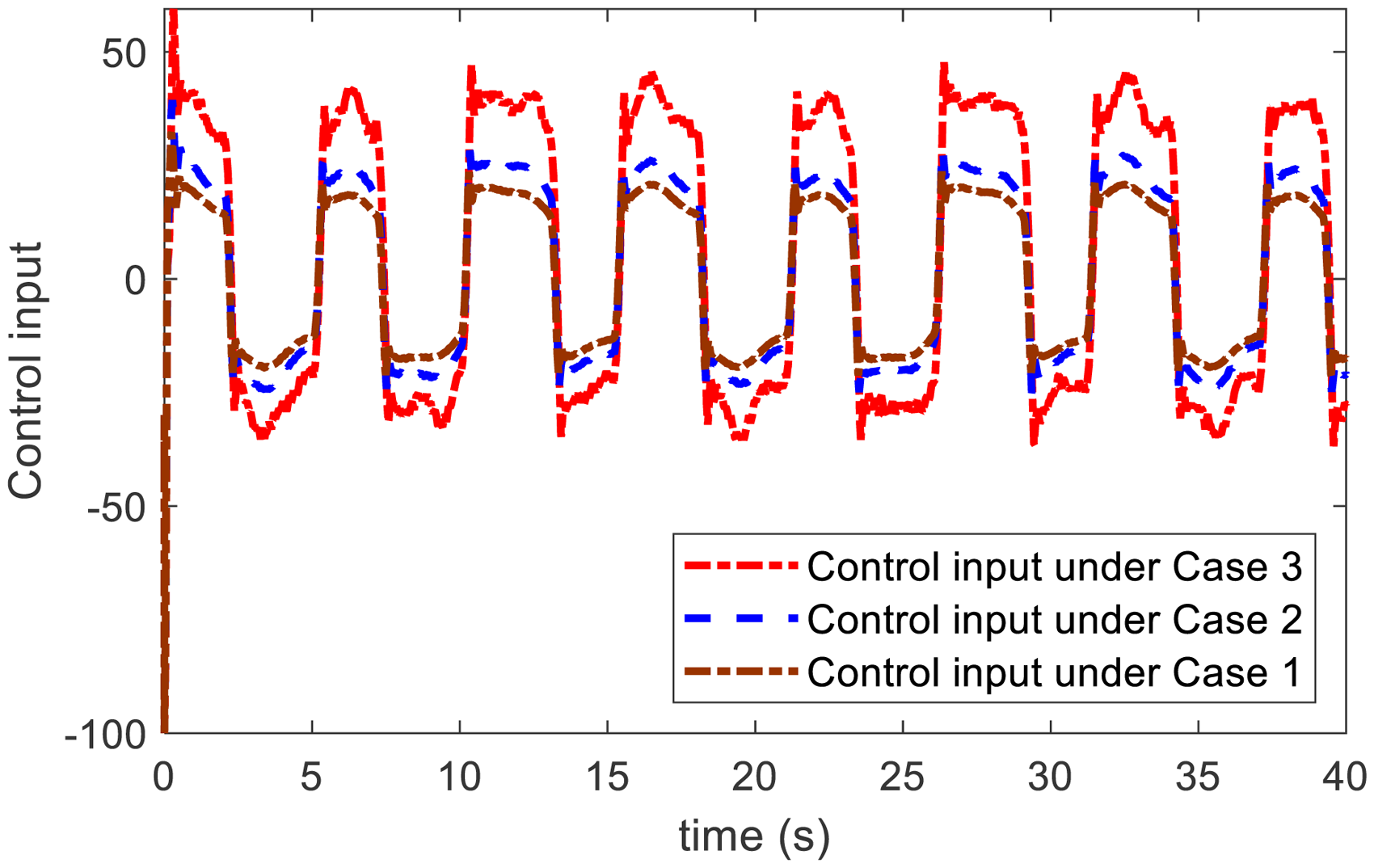
Control input under different cases.
Example B: Robot Manipulator System
The proposed control strategy is implemented on a two-degree of freedom robot manipulator system whose dynamic model 35 is given by:

In (45), the system dynamics are characterized by the variables Case 1: Case 2:

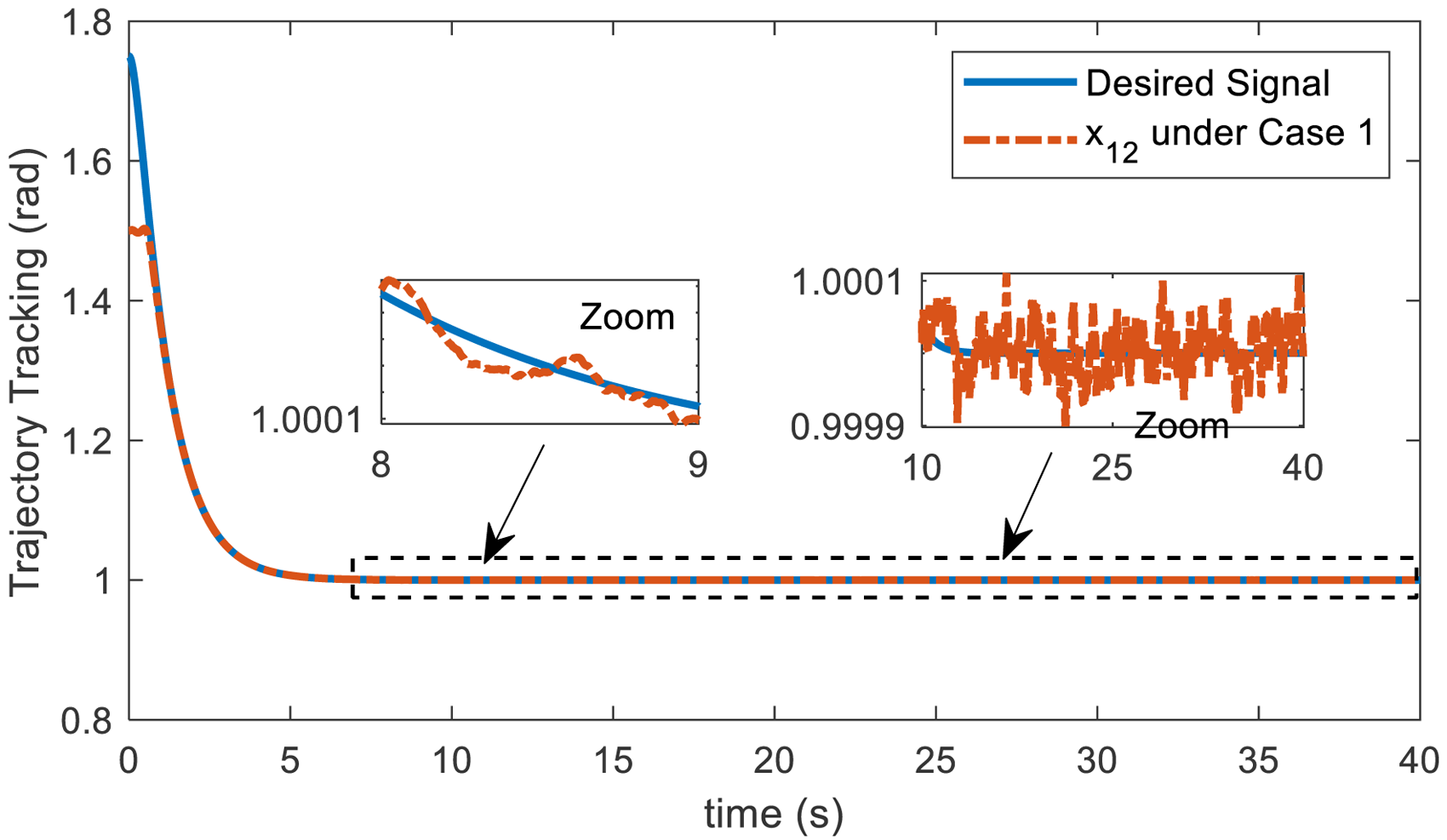
The robustness of the designed closed-loop system against parameter uncertainties and external disturbances is validated through the simulation results presented in Figures 8–17. Specifically, Figures 8–11 illustrate the robot manipulator's superior trajectory tracking performance, where it precisely follows the desired command signals despite these adverse conditions. Based on the rigorous theoretical derivation, the ultimate bound of the tracking error can be explicitly calculated. The analysis confirms that after a predefined-time

Trajectory tracking
Trajectory tracking

Trajectory tracking

Trajectory tracking

Tracking error

Tracking error

The estimation of the lumped disturbance under Case 1.

The estimation of the lumped disturbance under Case 2.

Control input under Case 1.
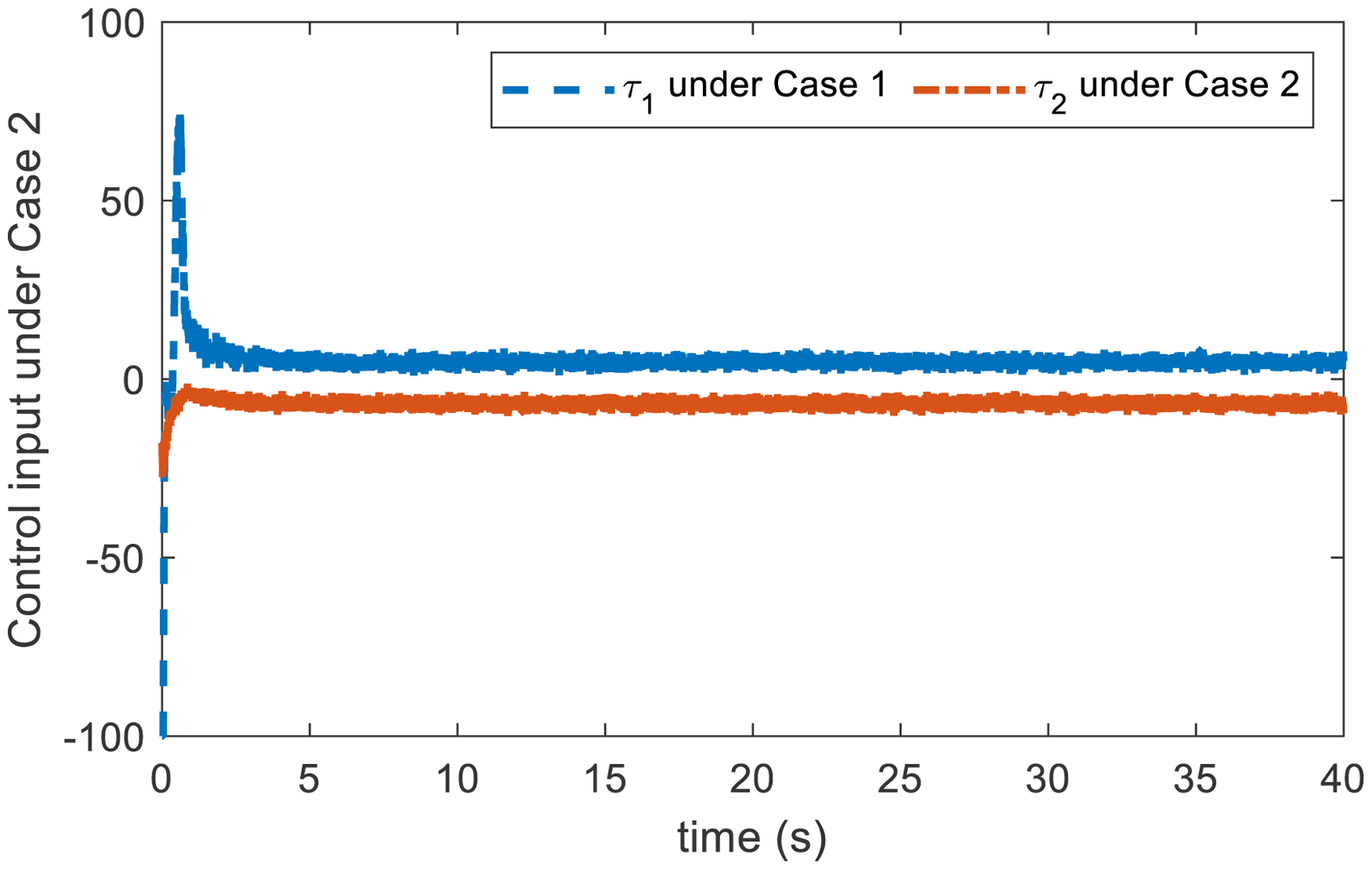
Control input under Case 2.
Conclusions
This paper presents a predefined-time SMC strategy for a class of mechanical systems. To counteract the influence of unknown dynamics and external disturbances, a predefined-time disturbance observer is synthesized, which facilitates the rapid and precise estimation of lumped system uncertainties. The core of the proposed strategy is a piecewise nonlinear sliding manifold, which is augmented with an error compensation term to guarantee convergence to a prescribed steady-state accuracy. Subsequently, a predefined-time SMC law is formulated to steer the system states into a predefined vicinity of this manifold within a user-specified time. A rigorous Lyapunov-based analysis confirms the predefined-time convergence of the tracking error. The numerical case studies on a linear motor positioner and a two-DOF robotic manipulator further illustrate these quantitative properties. Under simultaneous parametric perturbations and composite external disturbances, the proposed DO–SMC scheme drives all tracking errors
Footnotes
Acknowledgments
This work was supported by the Natural Science Foundation of Top Talent of SZTU (Grant No. GDRC202203), by the Shenzhen Science and Technology Program (Grant No. JCYJ20241202124703004), by the Natural Science Foundation of Top Talent of SZTU (Grant No. GDRC202407), by the Shenzhen Science and Technology Program (Grant No. KCXFZ20240903092603005), and by the Guangdong Provincial Engineering Technology Research Center for Materials for Advanced MEMS Sensor Chip (Award No. 2022GCZX005).
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Shenzhen Science and Technology Innovation Program, Natural Science Foundation of Top Talent of SZTU, Guangdong Provincial Engineering Technology Research Center for Materials for Advanced MEMS Sensor Chip, (grant number JCYJ20241202124703004, KCXFZ20240903092603005, GDRC202203, GDRC202407, 2022GCZX005).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Appendix A
As
The left-hand derivative is calculated using the definition:
The left-hand derivative is calculated using the definition:
The right-hand derivative is computed as
From the above analysis, it is established that