
Abstract
To address the trajectory tracking problem of unmanned surface vessels (USVs) when all dynamics parameters are unknown. This study designs a trajectory tracking controller for USVs based on Lyapunov theory and composite adaptive control technology. And based on dual feedback signals from tracking error and forecast error, an adaptive update law for dynamics parameters is designed using the Bounded Gain Forgetting Least Squares method. The adaptive update law enables the online identification of all dynamics parameters of USVs. Next, a concise nonlinear disturbance observer is designed based on error feedback signals to compensate for unknown time-varying environmental disturbances. A control law incorporating dynamics parameters adaptive update law and disturbance estimation is developed using composite adaptive control techniques. Subsequently, the convergence of trajectory tracking errors and dynamics parameters estimation errors is proven based on Lyapunov theory. Finally, numerical simulation experiments are conducted. The results of simulation experiments demonstrate that the proposed controller achieves precise trajectory tracking for the USV even when all dynamics parameters are completely unknown. Additionally, the controller exhibits robust disturbance rejection capabilities.
Introduction
With the increasing scarcity of land resources, the development of marine resources by humans has become an important trend for future development. Unmanned surface vessels (USVs) are water robots that can navigate unmanned and autonomously on the water surface, and have high maneuverability. They are often used to perform specific tasks such as maritime cruising, meteorological monitoring, antisubmarine operations, and mine sweeping in complex sea areas, and have important research value and broad research prospects in both military and civilian fields. 1 The motion control of USVs, as an important technical aspect of autonomous navigation, can be divided into positioning control,2–4 path following,5–7 and trajectory tracking8–10 according to different control objectives. Among them, the trajectory tracking of USVs specifically refers to designing a controller that ensures the USV not only navigate follows a preset route, but also reach the designated position along the route at the designated time. It can be seen that achieving precise tracking of preset trajectories is of great significance for improving the autonomous navigation of USVs.
When USVs perform motion control, the accuracy of prior information about parameters that characterize the USV's dynamic properties—such as mass, center of gravity, added mass, and hydrodynamic derivatives—is crucial for achieving precise trajectory tracking. These parameters, collectively referred to as the USV's dynamics parameters. The dynamics parameters of USVs vary significantly across different vessel types. These model parameters are typically obtained through costly ship maneuverability experiments. As a result, in many practical applications, these USV model parameters are either inaccurate or entirely unknown. When all dynamics parameters of USVs are unknown, it poses a huge challenge to achieve trajectory tracking of USVs.
With the development of nonlinear control theory, neural network and other technologies in recent years, scholars from all over the world have conducted some researches on USVs trajectory tracking through backstep method, model predictive control, robust control, reinforcement learning, and other methods. Wang designed a trajectory tracking controller for underactuated USVs based on the backstepping control method and fuzzy neural network, and the event-triggering condition for updating the controller was developed using Lyapunov functions. 11 Yuan simplified the mathematical model of ship motion into MPC discrete form, and designed an event-triggered adaptive horizon model predictive controller (ETAHMPC) by combining model predictive control and event triggering mechanism to track the trajectory of USVs autonomous berthing process. 12 Souissi designed a sliding controller with time-varying boundary layers to solve the trajectory tracking problem of USVs with unknown environmental disturbances. 13 Zheng designed a nonlinear active disturbance rejection controller to achieve trajectory tracking control of USVs, and improved the performance of the controller by adapting the controller design parameters through the Deep Deterministic Policy Gradient algorithm algorithm (DDPG). 14 The above research methods are difficult to solve the trajectory tracking problem of USVs when all dynamics parameters are unknown, and it is also difficult to identify unknown USVs dynamics parameters.
Adaptive control as an important nonlinear control method, automatically adjusts unknown parameters in the controller through the feedback signal of the dynamic system, which has certain advantages in solving the motion control problem of USVs when the dynamics parameters are unknown.
Ma designed a ship heading controller combining event triggering mechanisms and adaptive control technology for the problem of ship heading control when ship parameters are uncertain. 15 Zhang proposed an adaptive trajectory tracking control method with a high gain observer, and solved the model uncertainty through the Radial Basis Function Neural Networks network (RBFNN) and second-order differentiator. 16 Reza proposed a robust adaptive motion control method for USVs with model uncertainty by combining input constrained backstepping, functional approximation technique, and projection operator. 17 The above studies all use tracking error as a single signal to adjust uncertain dynamics parameters. Although these approaches can converge tracking error, it is difficult to identify the actual values of uncertain dynamics parameters. Moreover, when the dynamics parameters are unknown, that is the prior values of the dynamics parameters differ significantly from the actual values, these methods still have certain limitations.
Based on the identified values of the dynamics parameters and the signals of USVs velocity and acceleration, the external forces acting on USVs can be forecasted. Composite adaptive control adjusts uncertain dynamics parameters through dual signals of tracking error and forecast error, providing a new idea for achieving simultaneous convergence for trajectory tracking errors and dynamics parameters estimation errors. Research on composite adaptive control has achieved significant progress in fields such as robotics and unmanned aerial vehicles.18–20 In the field of USVs, Souissi considered the impact of water flow on USVs, designed parameters adaptive update law based on tracking errors and dynamics parameter estimation errors, and proposed a robust adaptive trajectory tracking controller. 21 However, this study is unable to estimate all USV dynamics parameters. It can be seen that there is relatively little research on composite adaptive technology in the field of USVs. The bounded gain forgetting least squares method (BGFLS), as a classic parameter identification algorithm, can be used to extract dynamics parameter information from both tracking error and forecast error signals, and improving the accuracy of dynamics parameter estimation.
Therefore, in order to achieve precise trajectory tracking of the USVs and online estimation of dynamics parameters under the conditions of unknown dynamics parameters and unknown time-varying environmental disturbances. This article combines composite adaptive and Lyapunov theory to design a trajectory tracking controller for USVs and an online estimation method for USVs dynamics parameters.
Firstly, based on the feedback signals of trajectory tracking errors and forecast errors, an online estimation method for the USV dynamics parameters is designed by introducing BGFLS algorithm. A disturbance observer is developed to compensate for unknown environmental disturbances, and a control law is subsequently designed based on this basis. Following this, the global convergence of both the trajectory tracking errors and the dynamics parameter estimation errors are rigorously proven using Lyapunov's second method. Finally, the effectiveness of the proposed approach is validated through simulation experiments. The main contributions of this article are summarized as follows:
A composite adaptive controller is designed to achieve trajectory tracking control of USVs under conditions of unknown dynamics parameters and unknown time-varying environmental disturbances. Based on the BGFLS algorithm and composite adaptive control techniques, an adaptive update law for dynamics parameters is designed to enable online estimation of all USV dynamics parameters. The adaptive update law identifies the unknown dynamics parameters online according to the dual feedback signals of trajectory tracking error and forecast error. The adaptive update law simultaneously ensures the convergence of both dynamics parameter estimation errors and trajectory tracking errors, when the initial or prior values of the USV dynamics parameters are significantly different from their actual values.
The rest of this article is organized as follows. The second section established a three degree of freedom USVs model and defined the trajectory tracking problem of USVs. The third section introduced the details of the controller and the dynamics parameters adaptive update law, as well as the proof of the global convergence of trajectory tracking error and dynamics parameters estimation error. The fourth section analyzed the process and results of the simulation experiments. The fifth section summarized the article.
Problem formulation
USV model
To facilitate the description of the motion of USVs in three degrees of freedom on the horizontal plane, a space fixed coordinate system


USVs motion coordinate system. USV: unmanned surface vessels.
In equation (1),




In equations (3) to (5),
Actuator saturation
The control force of USVs is usually generated by actuators such as rudders and propellers. Depending on the specific mission and ship type of USVs, they will be equipped with different actuators. Since these actuators are influenced by factors such as their own materials, dimensional parameters, and mechanical friction, the control forces that USVs actuators can generate have saturation constraint as shown in equation (6):

In the above equation,
Definition of USVs trajectory tracking problem
Define the desired trajectory

In order to facilitate the description of the USV trajectory tracking problem in this article, the following assumptions are made.
The desired trajectory
All dynamics parameters in
The unknown time-varying environmental disturbances f acting on USVs are bounded. That is, there exists a positive constant R such that
According to Assumption 2, the estimation of USVs dynamics parameters

Define the dynamics parameters estimation error
Control problem: For USVs which kinematics and dynamics can be characterized by equations (1) to (5) and satisfies Assumptions 2 and Assumptions 3. When confronted with a desired trajectory satisfying Assumption 1, the control objective of trajectory tracking is to design a controller for the control input
Controller design
In this section, based on the dual signals of trajectory tracking error and forecast error, a controller and an online adaptive update law for the dynamics parameters of USVs are designed with composite adaptive control techniques and BGFLS algorithm. And the convergence of trajectory tracking error and parameters estimation error are proved based on Lyapunov's second method. The calculation block diagram of the USV trajectory tracking controller in this article is shown in Figure 2.

Controller calculation block diagram.
Design of control law and parameters adaptive update law
The auxiliary variables as shown in equation (7) are defined to measure the trajectory tracking error of USVs.

In the above equation,

where, the specific form of

Define the time-varying gain matrix P such that the derivative of

In the above equation,

In the above equation,
A vector or matrix Y is persistently excited (PE) if there are
The matrix
The matrix
According to Assumption 4 and Lemma 1, it is known that

During a single voyage, the loading condition of USVs typically remains unchanged, and the mass reduction due to energy consumption can be neglected. Additionally, the hydrodynamic derivatives of USVs, which are primarily determined by the hull shape, usually exhibit minimal variation during navigation. Therefore, the dynamics parameters

To facilitate the design of the controller, the following auxiliary variables are defined:

In the above equation,

Substituting the USVs dynamic model shown in equation (1) into equation (14), we obtain:

According to equation (13), after substituting

By substituting equations (3) to (5) into

Among them, the specific form of

According to the specific form of the matrix

The forecast error e is defined as follows:

In the above equation,
In summary, the adaptive update law for all dynamics parameters of USVs is designed as follows:

In practical applications, the specific computational procedure for online adaptive of all USV dynamics parameters is as follows:
The composite adaptive controller for USVs, incorporating the dynamics parameters adaptive update law and the disturbance estimation

In the above equation, the control gain matrix

After substituting equation (19) and equation (20) into equation (22), we obtain:


After further derivation of equation (23), we obtain:

To compensate for unknown time-varying environmental disturbances, a nonlinear disturbance observer is designed as follows:

In the above equation, K is the design parameter. In practical applications, the environmental disturbance acting on the USV at time t can be computed using
Proof of convergence
Based on the controller designed above, the main results of this article are summarized in the following theorem.
For USVs whose kinematics and dynamics can be characterized by equations (1) to (5), and satisfying Assumptions 1 to 3. Considering the parameters adaptive update law satisfying Assumptions 4 in equation (20), the composite adaptive controller in equation (21), and the nonlinear disturbance observer in equation (25). For any initial conditions satisfying
Proof.
In the preceding section, after a series of analyses of the candidate Lyapunov function established in equation (11), its derivative is show in equation (24). By substituting equations (9) and (10) into equation (24), we obtain:

After substituting equation (25) into equation (26), we obtain:

In the above equation,


Let

Equation (29) can be further simplified as:

In the above equation,

In the above equation,
Simulation experiments
Experimental design
This article selects CyberShip II
22
as the target ship to verify the effectiveness of the proposed USVs composite adaptive controller named as CSA controller. The saturation constraint for the control forces of the target ship is set as:
Actual dynamics parameters of CyberShip II.

In order to better analyze the performance of CSA controller, in this article, the adaptive controller named as SA controllerthat identifies unknown USV dynamics parameters solely based on the tracking error signal, as well as the homogeneous integral fast terminal sliding mode controller (HI-FTSM controller)
25
which is designed based on adaptive and sliding mode control techniques, are employed as comparison controllers. Among them, the control law and the parameters adaptive update law of SA controller are as follows:
In the above equation, 
In the above equation,
In practical navigation environment, the environment disturbances acting on the USV due to factors such as wind, waves, and currents can be modeled as a first-order Markov process as shown in the following equation
12
:
In the above equation,
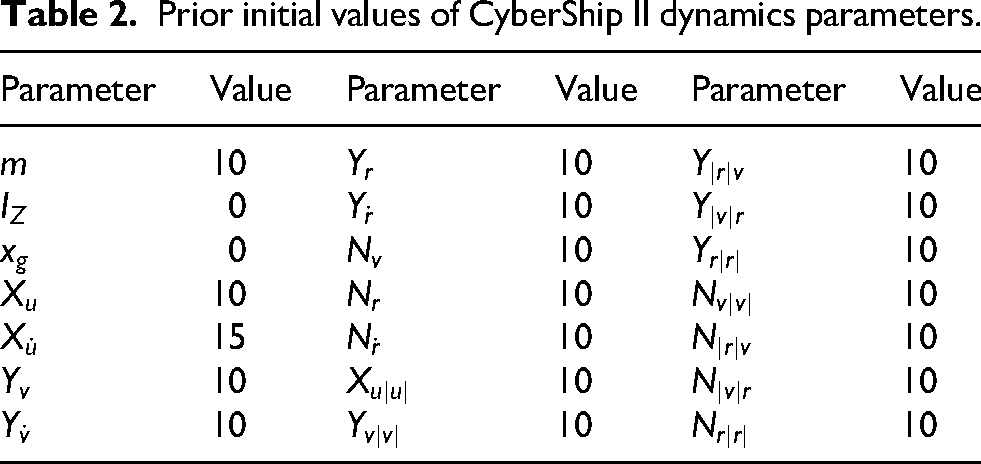
Due the controller proposed in this article is used to solve the problem of USVs trajectory tracking when the USVs dynamics parameters are unknown, this also means that the prior or initial values of the USVs dynamics parameters differ significantly from the actual values. Therefore, set the initial values of the target ship dynamics parameters as shown in Table 2.
Prior initial values of CyberShip II dynamics parameters.
Subsequently, this study designs two desired trajectories (cases 1 and 2) to comprehensively analyze the performance of the CSA controller. Accordingly, trajectory tracking simulation experiments for the CSA controller, SA controller, and HI-FTSM controller are conducted for both cases 1 and 2 to validate the efficacy of the CSA controller. The design parameters for each controller are configured as detailed in Table 3.
Controller parameters settings.
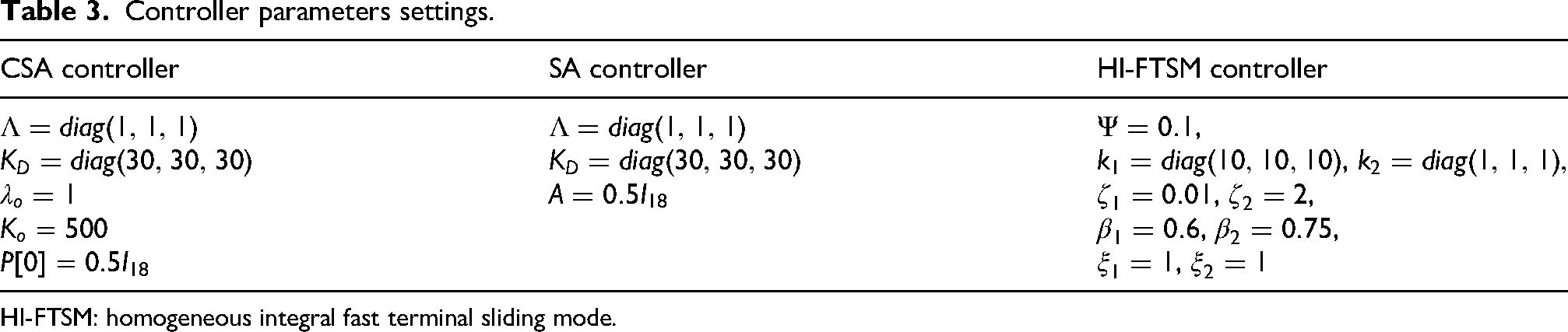
HI-FTSM: homogeneous integral fast terminal sliding mode.
Simultaneously, the following performance metrics are defined to evaluate the controller's performance:
(1) Root mean square (RMS): (2) Mean absolute steady-state error (SSE): (3) Transient maximum absolute error (TME): (4) Define the variance
The time interval
Experimental results and analysis
Case1
The initial conditions for the USV in the trajectory tracking simulation experiment of case 1 are 
The trajectory tracking results of the USV in case 1 are shown in Figures 3 to 7.

USV trajectory in case 1. USV: unmanned surface vessels.

Tracking error of USV coordinates and heading angle in case 1. USV: unmanned surface vessels.

Velocity components of USV in case 1. USV: unmanned surface vessels.

Tracking error of USV velocity component in case 1. USV: unmanned surface vessels.
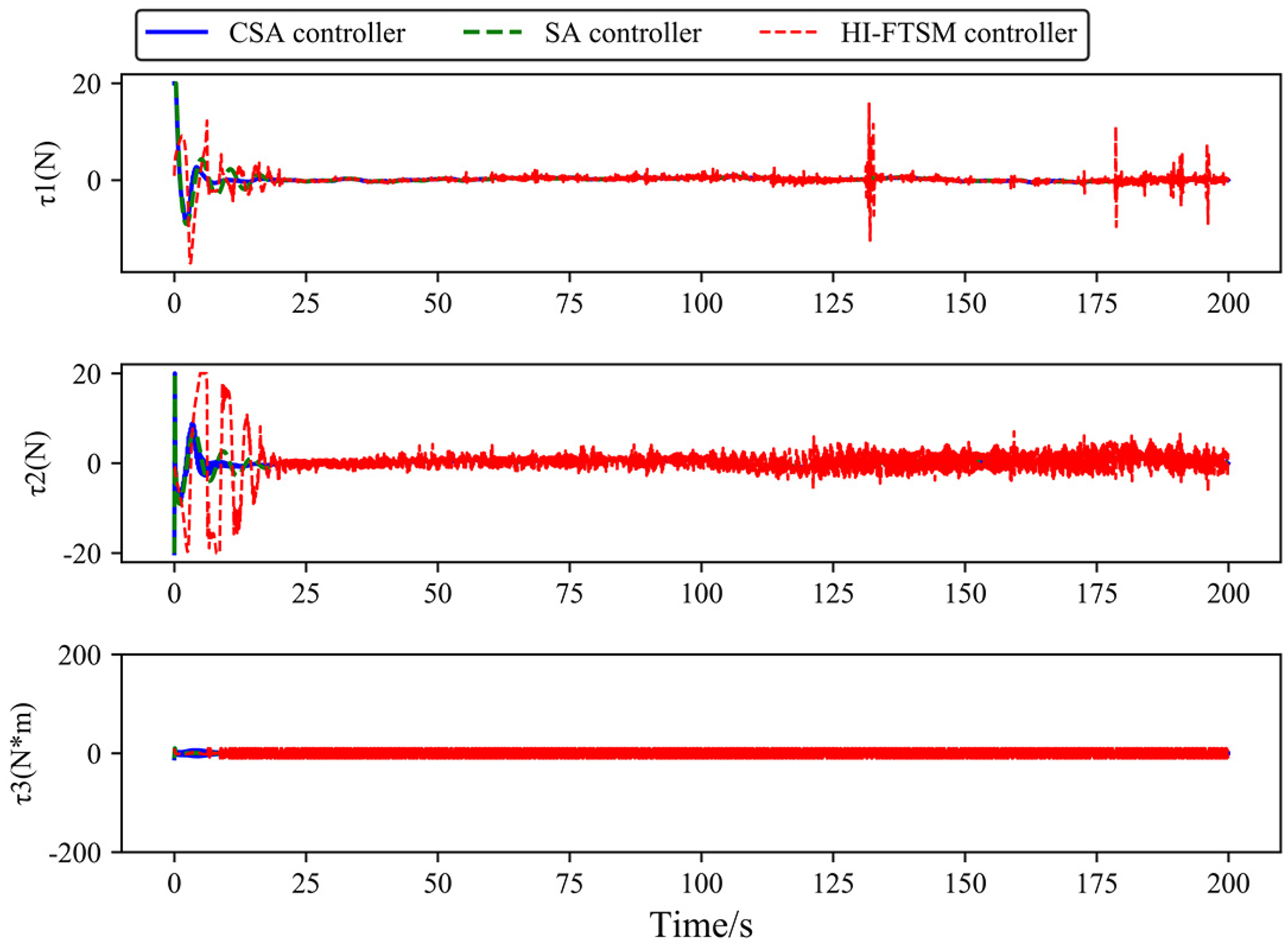
Control input of USV in case 1. USV: unmanned surface vessels.
As illustrated in Figures 4 and 5, when the dynamics parameters are unknown and the USV is subjected to environmental disturbances, the CSA controller consistently enables the USV to track the desired trajectory. The tracking error of x and y coordinates converge at 4 and 18 seconds, respectively, while the tracking error of heading angle converges at 16 seconds, and the tracking error of y-coordinate oscillation within [−0.091 and 0.206 m]. The SA controller causes the tracking error of USV's y-coordinate and heading angle to oscillate within [−0.143 and 0.246 m] and [−0.087 and 0.117 rad], respectively, after 20 seconds. The HI-FTSM controller achieves convergence of tracking error of both x and y coordinates by 20 seconds, while maintaining the tracking error of heading angle oscillation within [−0.101 and 0.213 rad]. These results demonstrate that, compared to the SA controller and the HI-FTSM controller, the CSA controller make the USV has superior performance in tracking both the position coordinates and the heading angle. Figures 6 and 7 show that the CSA controller ensures the convergence of the velocity component tracking errors to zero, and has better tracking effect on the velocity component than the SA controller. However, the HI-FTSM controller exhibits larger initial errors in the velocity components and fails to effectively converge the yaw rate tracking error. Figure 8 demonstrates that the output of the CSA controller is smooth, aligning with practical application requirements. Whereas the output of the HI-FTSM controller exhibits noticeable chattering, this reduces the safety of USV in practical applications. The RMS and various quantitative performance metrics of the USV under different controllers in case 1 are presented in Tables 4 and 5, respectively.

Estimation of unknown parameters
RMS

HI-FTSM: homogeneous integral fast terminal sliding mode; RMS: root mean square.
Quantitative analysis of the controllers in case 1.
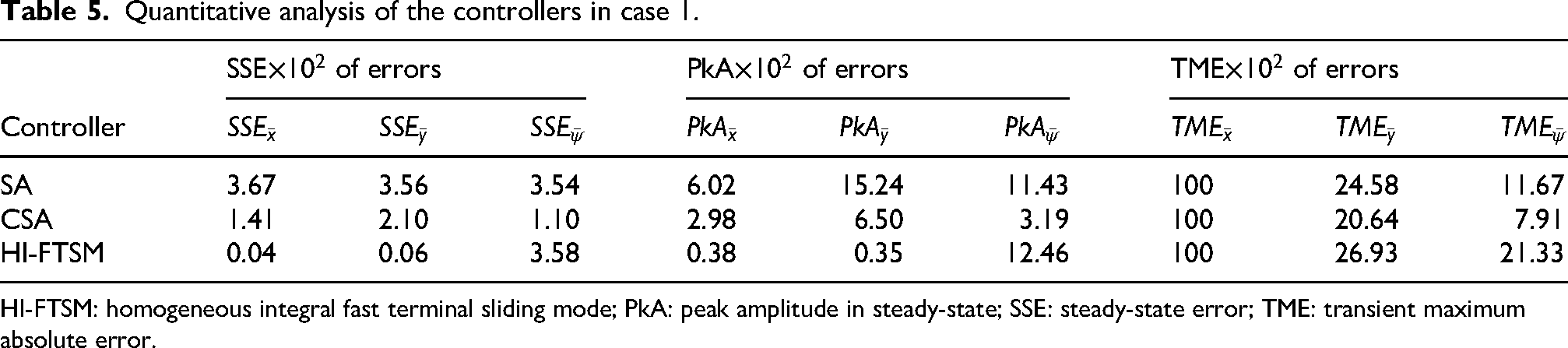
HI-FTSM: homogeneous integral fast terminal sliding mode; PkA: peak amplitude in steady-state; SSE: steady-state error; TME: transient maximum absolute error.
From Tables 4 and 5, it can be seen that when the navigation environment has environmental disturbances and the USV dynamics parameters are unknown, the CSA controller achieves significant reductions in the RMS compared to the SA controller. Specifically, the CSA controller demonstrates over 70% reduction in
Meanwhile, the RMS values of the CSA controller are also lower than those of the HI-FTSM controller. Except for
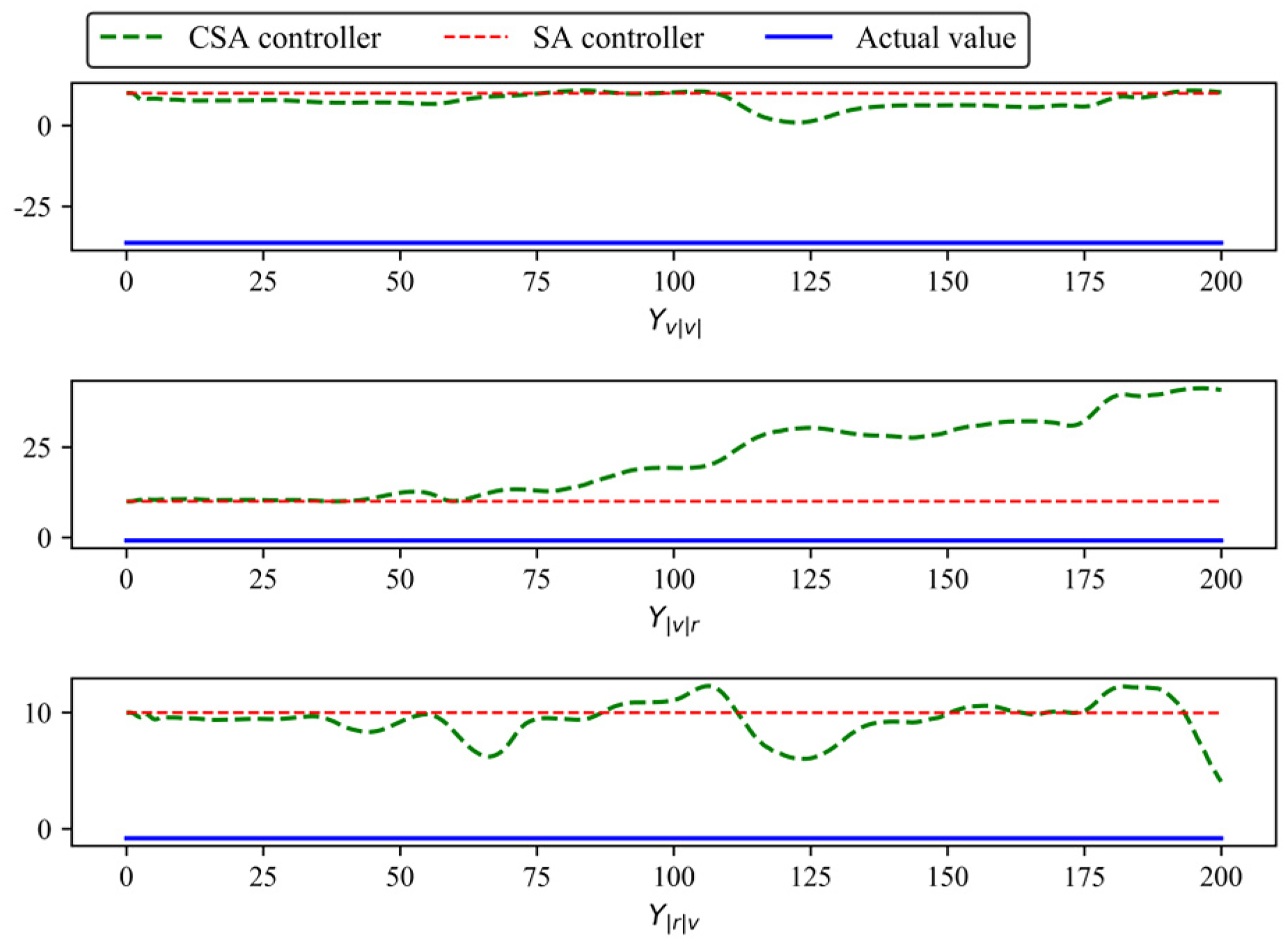
The online parameter estimation process of all USV dynamics parameters for CSA controller and SA controller in case 1 are shown in Figures 8 to 13.

Estimation of unknown parameters
Estimation of unknown parameters

Estimation of unknown parameters

Estimation of unknown parameters

Estimation of unknown parameters
From Figures 8 to 13, it can be seen that as the USV trajectory tracking progresses in case 1. The CSA controller ensures that the estimation errors of all dynamics parameters remain bounded, and drive the estimation the parameters reflecting the USV's inertia, namely The CSA controller, which uses dual signals of tracking error and prediction error to estimate unknown dynamics parameters, is superior to the SA controller, which only estimates dynamics parameters through a single signal of tracking error. When faced with situations where the prior values of dynamics parameters differ greatly from the actual values, the CSA controller can make most of the dynamics parameter estimation errors converge to 0. This is also the reason why in case 1, the CSA controller can make the trajectory tracking error converge. Compared to the accuracy of high-order hydrodynamic derivatives, the accuracy of dynamics parameters which reflecting the inertia of USVs, and the accuracy of low-order hydrodynamic derivatives of USVs, are more important for achieving trajectory tracking of USVs. Accurate estimation of dynamics parameters which reflect the inertia of USVs and low-order hydrodynamic derivatives are crucial for achieving accurate trajectory tracking of the USV.
Case2
The initial conditions for the USV in the trajectory tracking simulation experiment of case 2 are
The trajectory tracking results of the USV in case 2 are shown in Figures 14 to 18. The RMS and various quantitative performance metrics of the USV under each controller in case 2 are shown in Tables 6 and 7, respectively.

USV trajectory in case 2. USV: unmanned surface vessels.
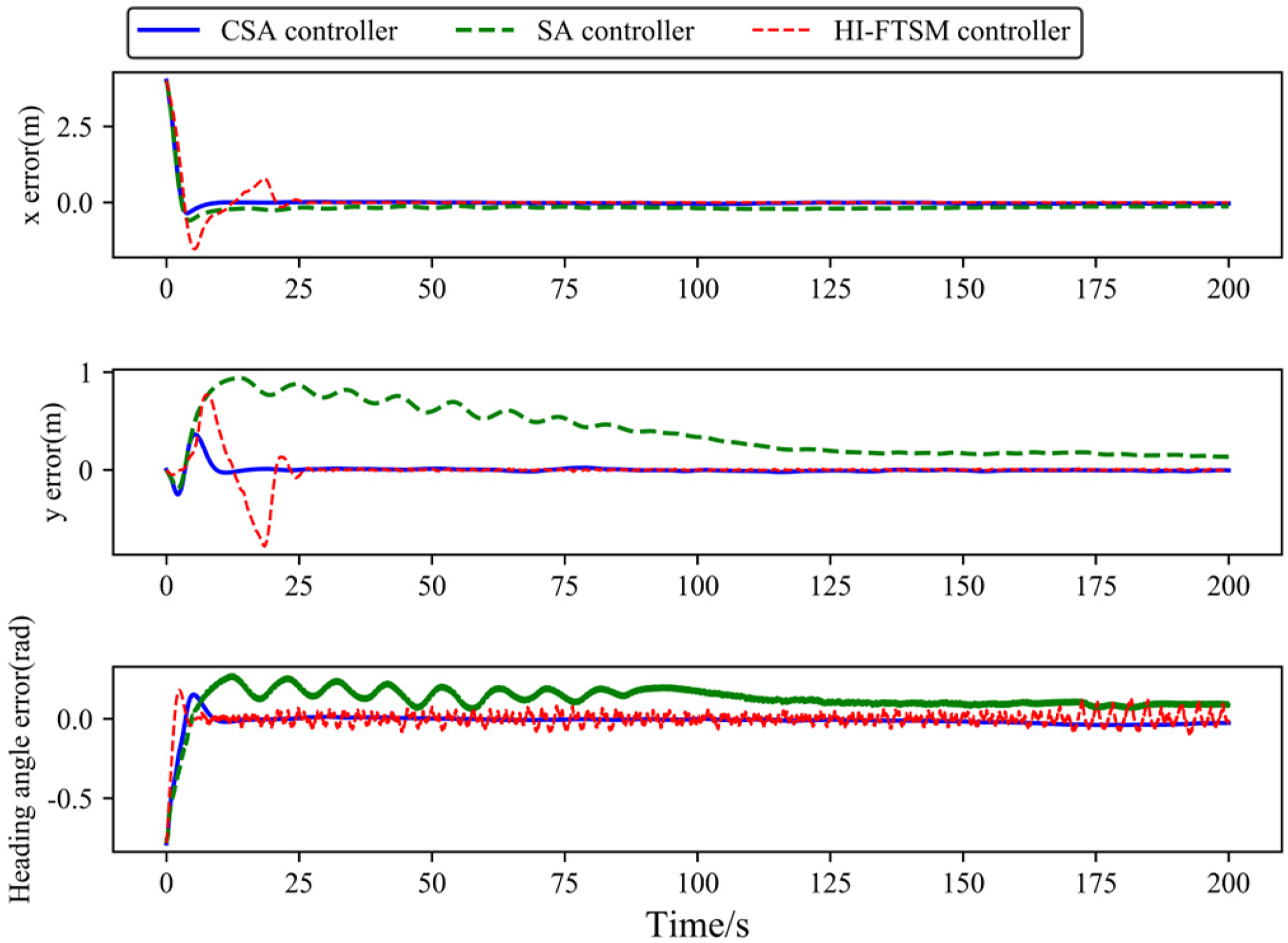
Tracking error of USV coordinates and heading angle in case 2. USV: unmanned surface vessels.

Velocity components of USV in case 2. USV: unmanned surface vessels.

Tracking error of USV velocity component in case 2. USV: unmanned surface vessels.

Control input of USV in case 2. USV: unmanned surface vessels.
RMS

HI-FTSM: homogeneous integral fast terminal sliding mode; RMS: root mean square.
Quantitative analysis of the controllers in case 2.

HI-FTSM: homogeneous integral fast terminal sliding mode; PkA: peak amplitude in steady-state; SSE: steady-state error; TME: transient maximum absolute error.
As observed in Figures 14 to 18, when tracking the desired trajectory show in equation (36), the CSA controller enables the USV's trajectory coordinates, heading angle, and velocity components to converge to the desired trajectory more rapidly, with all tracking errors converging within 20 seconds. In contrast, the SA controller results in slower convergence for tracking errors of both the y-coordinate and heading angle. The HI-FTSM controller exhibits oscillatory behavior in both velocity component tracking error and heading angle tracking error within certain ranges, accompanied by significant control output chattering.
Tables 6 and 7 demonstrate that the CSA controller achieves reductions in RMS, SSE, PkA, and TME compared to the SA controller. Except for
The results of cases 1 and 2 fully demonstrate that when the dynamics parameters of the USV are unknown and the USV is subject to environmental disturbances, the CSA controller designed in this article has strong robustness, enabling the USV to track the desired trajectory and desired speed while meeting actuator saturation requirements.
Conclusion
This article addresses the trajectory tracking problem of USVs under unknown time-varying environmental disturbances and unknown dynamics parameters by designing a composite adaptive trajectory tracking controller (CSA controller). Firstly, an adaptive update law based on the Bounded Gain Forgetting least squares (BGFLS) method is proposed to achieve online identification of the unknown USV dynamics parameters. Secondly, a nonlinear disturbance observer is designed to compensate for the unknown time-varying environmental disturbances. Subsequently, a control law incorporating the parameter adaptive update law and the disturbance observer is developed based on composite adaptive control theory. The convergence of the model parameter estimation errors and trajectory tracking errors is then proven using Lyapunov theory. Finally, simulation experiments are conducted. The results demonstrate that the proposed controller exhibits strong antidisturbance capabilities. And the adaptive rates of USV dynamics parameters in the controller enable effective online estimation of both inertial parameters and low-order hydrodynamic derivatives. Although deviations exist in estimating higher-order hydrodynamic derivatives, the controller maintains the USV's trajectory tracking capability even under environmental disturbances and with unknown dynamics parameters. This demonstrates that, compared to the precision of higher-order hydrodynamic derivatives, the accuracy of inertial parameters and low-order hydrodynamic derivatives proves more critical for achieving successful USV trajectory tracking.
The application of the controller proposed in this article to a real USV is the next research direction of this article.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the The Guangxi Science and Technology Major Program, (grant number Grant GuikeAA23023013, Grant GuikeAA23062037).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.