
Abstract
This article investigates the path tracking problem for the two-wheel differential drive automated guided vehicles (AGVs) under the influence of unknown disturbances. Firstly, a state observer and a radial basis function (RBF) neural network are combined to form an equivalent extended state observer (ESO). The observed values of state observer are used as the inputs of the RBF neural network to compensate for unknown disturbances affecting the AGV, diminishing the complexity of manual parameter tuning of traditional ESO, and the disturbance estimation error can be demonstrated to converge to zero. Subsequently, a sliding mode controller is proposed based on an improved piecewise variable speed reaching law, which incorporates both the hyperbolic tangent function and a special power function. The higher convergence rate of the reaching law can be guaranteed when the system states are outside the boundary layer and the convergence rate progressively decreases to ensure smooth and effective arrival of the state when the system states are inside the boundary layer. Additionally, the RBF neural network is utilized for estimating and optimizing the controller parameters, aiming to reduce the system chattering and achieve precise path tracking. The asymptotic stability of the system can be proved via the Lyapunov stability theory. Finally, simulation results demonstrate the validity and superiority of the sliding mode controller based on the improved piecewise variable speed reaching law and equivalent ESO proposed in this article.
Keywords
Introduction
Automated guided vehicles (AGVs) are a type of automated transport device capable of operating without human intervention. Equipped with sensors and guidance systems, AGV can travel along the planned path with precision. AGV is known for the high level of automation, stability and flexible operation. In recent years, AGV is playing an increasingly important role in the field of various industrial fields, which is widely used in smart warehousing, production line transportation, container handling and other occasions. 1
Path tracking is one of the key technologies of AGV, focusing on controlling the vehicle to travel along the predefined path while ensuring both safety and comfort of driving. Over recent years, considerable attention has been given to improving the accuracy of AGV path tracking. In Wang et al., 2 a three-step control method combining steady-state control, feedforward control and feedback control was proposed to achieve precise path tracking control for AGV. Furthermore, to enhance the precision of AGV path tracking, a robust static output feedback controller based on a hybrid genetic algorithm and linear matrix inequality method was introduced, enabling high-precision path tracking without requiring lateral velocity information. 3
Sliding mode control has found widespread application in AGV path tracking due to its strong robustness, fast response, and simple physical implementation. In Fan et al., 4 an AGV path tracking method combining deep reinforcement learning was designed, using deep reinforcement learning techniques to derive the optimal action policy of AGV, which could strengthen the AGV's interaction capabilities with the complex environment and improve path tracking precision. To address the challenges of AGV path tracking, a hierarchically improved fuzzy dynamic sliding mode control method was developed in Hwang et al., 5 featuring a tuning mechanism that adjusts the coefficients of sliding surfaces and other parameters, effectively handling system uncertainties without imposing a significant computational burden. Additionally, a robust path tracking control strategy based on nonsingular terminal sliding mode was proposed, where the nonlinear error feedback control law was designed to enable AGV rapidly and accurately follow the reference path. 6
However, the aforementioned works failed to adequately consider the issue of chattering in sliding mode control for AGV path tracking. This issue arises due to the sign function in the sliding mode reaching law, making it challenging for the system state to slide smoothly along the sliding surface toward the equilibrium point when it reaches the sliding surface. Instead, the system state oscillates back and forth on the sliding surface, resulting in chattering phenomenon. As is well known, chattering is problematic as it may trigger high-frequency unmodeled dynamics or even lead to system instability. Therefore, in order to mitigate or eliminate the chattering caused by sliding mode control, numerous works have focused on improving the sliding mode reaching law. In Han et al., 7 a double closed-loop control method based on the enhanced double power reaching law was proposed, where the coefficients dynamically change according to the system state, optimizing the path tracking performance and achieving superior chattering suppression effect. Huang et al. 8 developed a fuzzy sliding mode control strategy employing an exponential reaching law with a power term, solving the chattering issue associated with the traditional reaching law while enhancing both the speed and steady-state tracking accuracy of the vehicle's path tracking. To deal with the trajectory following problem of AGV, an improved sliding mode control method combining power and exponential reaching laws was introduced in Jiang et al., 9 promoting the convergence rates of tracking errors and suppressing the system chattering. Furthermore, Chen et al. 10 investigated a sliding mode control method based on a novel variable exponential reaching law, exploiting two exponential terms to reduce the reaching steps and narrow the quasi-sliding mode domain, accelerating the convergence rate outside the sliding mode surface and suppressing system chattering. In Shen et al., 11 a novel continuous adaptive super-twisting sliding mode control method was developed, incorporating a rapid power reaching law and an improved rapid nonsingular terminal sliding mode surface, which efficiently restrained the system chattering and enhanced tracking accuracy. Xi et al. 12 introduced a new sliding mode control strategy based on a fuzzy reaching law, improving the yaw angle control precision of unmanned aerial vehicles, achieving chattering suppression and fast position tracking. Su et al. 13 addressed continuous time dynamic sliding mode control of Takagi-Sugeno fuzzy nonlinear systems using an event-triggered mechanism, in which the signum function of the sliding mode surface was substituted by the continuous function, effectively eliminating system chattering. In addition to designing improved reaching law, reasonably reducing the gain coefficient of the switching control term can partially suppress system chattering. Inspired by the adaptive switching gain adjustment algorithm introduced by Lin and Wai, 14 a new adaptive super-twisting second-order sliding mode control method based on a novel two-layer nested adaptive approach for the nonlinear system was proposed in Edwards and Shtessel, 15 avoiding the severe chattering associated with the traditional sliding modes.
However, the above studies have overlooked the impact of external disturbances on the path tracking control issue when employing the sliding mode method. In reality, unavoidable unknown external disturbances in practical systems have the significant negative impact on the stability and performance of control systems. Moreno and Osorio 16 presented a modified super-twisting algorithm that combined second-order sliding mode with linear control, demonstrating finite-time convergence and robustness against strong disturbance terms, thereby mitigating the pronounced chattering effects inherent in classical sliding mode control. Nekoukar and Dehkordi 17 investigated a new adaptive fuzzy terminal sliding mode controller in the presence of external disturbances and model uncertainty, ensuring the stability of the quadcopter while guaranteeing the tracking accuracy for the predefined flight path. In Ding et al., 18 a third-order sliding mode dynamic control method was proposed to address the challenge of straight-line path tracking of agricultural tractors under the unknown disturbance, wherein the presented method maintains the stability of vehicle and improves the system's transient performance. In Taghavifar and Rakheja, 19 a robust adaptive indirect control method utilizing a class of exponential sliding mode fuzzy type-2 neural networks was introduced to tackle the problem of autonomous vehicle path tracking under external disturbances, effectively eliminating system oscillations and achieving rapid and smooth path tracking. Sabiha et al. 20 introduced a trajectory tracking controller designed for an autonomous tracked vehicle in the presence of disturbances and model uncertainties. This controller leverages sequential quadratic programming to obtain optimal controller gains, thereby mitigating chattering output, enhancing controller performance, and reducing computational burden.
In addition, radial basis function (RBF) neural networks are renowned for their exceptional approximation capabilities, absence of local minimum issues, and rapid learning convergence, making them widely utilized in disturbance handing. For instance, in addressing the asymptotic tracking problem of a class of nonlinear systems subject to external disturbances, an adaptive backstepping dynamic surface path tracking control method based on RBF neural network was presented in Shi et al., 21 achieving outstanding approximation capability for unknown external disturbances and precise path tracking. In Kim and Kee, 22 an adaptive super-twisting sliding mode control algorithm grounded in RBF neural networks was developed to tackle the path tracking challenges encountered by autonomous vehicles under the influence of variable environment interference and vehicle parameter uncertainty, and this approach accurately estimated disturbances while mitigating chattering, resulting in rapid path tracking. What's more, an improved fixed-time disturbance observer was formulated in Zhang et al. 23 to estimate unknown mismatched disturbances, using RBF neural network to approximate uncertain nonlinear functions, achieving fixed-time consensus path tracking of multiagent systems, with tracking errors and disturbance estimation errors converging within any small neighborhood of the origin. In El Hajjami et al., 24 the proposed methodology employed adaptive self-regulation laws based on RBF neural networks to estimate the upper bounds of unknown disturbances. Additionally, the introduced adaptive neuro-sliding mode steering angle controller approach facilitated high-precision tracking performance of AGV, effectively mitigating undesired chattering.
The extended state observer (ESO) is well-known for its ability to accurately estimate the total disturbance, both internal and external to the system, thereby enabling real-time compensation. It overcomes the limitations of the Luenberger observer that requires the linear model, by being applicable to disturbance estimation in unknown nonlinear systems. Shen and Xu 25 designed an active disturbance rejection controller that integrates an adaptive RBF neural network with ESO to estimate unknown total disturbances, enhancing the adaptability of the unmanned aerial vehicle controller and leading to high-precision trajectory tracking control. Moreover, Nie et al. 26 raised a finite-time output feedback path tracking control strategy for underactuated surface vehicles in the presence of unknown velocities, unknown dynamics, and unknown external environmental disturbances, where a novel finite-time extended state observer was devised to estimate unknown velocities and disturbances, ensuring precise tracking of the desired path in finite time. Furthermore, by incorporating learning methods to ESO, a third-order data-driven adaptive extended state observer was proposed to estimate the unknown disturbances in the autonomous unmanned vessels system on the basis of the position and acceleration information. 27 In Zhao et al., 28 the model uncertainties and external disturbances were estimated by the adaptive fixed-time extended state observer which could complete the estimation within a specified time with minimal peak observation error compared to existing extended state observers. Cao et al. 29 investigated a robust trajectory tracking controller based on homogeneous nonlinear extended state observers and dynamic surface control, effectively handling random lumped interference including model uncertainty, unmeasured interference and noise, ensuring precise path tracking of actuated unmanned surface vessel. Nevertheless, the traditional extended state observer often involves numerous parameters, posing a challenge for manual tuning and achieving satisfactory control performance.
Inspired by the preceding researches, this article investigates the sliding mode path tracking control problem of two-wheel differential drive AGV in the presence of unknown external disturbances. To address the challenges of parameter tuning in traditional ESO, the state observer and RBF neural network are combined to form the equivalent ESO (EESO), where the RBF neural network is used to estimate the unknown disturbances, improving the adaptive ability of the system. Aiming to resolving the adverse effects of chattering on the control system, the sliding mode controller based on the improved piecewise variable speed reaching law is introduced, and the other RBF neural network is utilized for estimating the controller parameters. The proposed piecewise variable speed reaching law outperforms the conventional exponential reaching law by incorporating a boundary layer, which not only ensures expedient convergence but also guarantees the stable arrival of the system state point. By reasonably reducing the gain coefficient of the switching control term, the system's chattering is further suppressed, enabling global asymptotic stable path tracking of AGV under external disturbances. The main contributions of this paper are as follows,
(1) The EESO that combines with state observer and RBF neural network is designed, in which the RBF neural network is used to compensate the external disturbances of AGV control system. The state observer only needs to obtain estimated values of the longitudinal position error and heading angle error, which are utilized as inputs of RBF neural network, enhancing the accuracy of disturbance estimation. In contrast to the traditional ESO, the parameters adjustment related to the extended states of the EESO can be eliminated due to the introduction of the RBF neural network, and the difficulty of global parameter setting can be alleviated.
(2) The sliding mode path tracking controller based on the improved piecewise variable speed reaching law is proposed to achieve global asymptotic stable path tracking of AGV with minor tracking errors. When the system state point lies outside the boundary layer, it converges to the boundary layer with a higher convergence rate, when the system state point is inside the boundary layer, the reaching law can ensure the smooth and effective arrival of the state point, effectively suppressing the system chattering phenomenon.
(3) The parameters of the sliding mode controller are estimated by RBF neural network, eliminating the need for manual parameter tuning, which effectively reduces system chattering by appropriately lowering the gain coefficients of switching control terms such that the accuracy of the path following is further improved.
The rest parts of this article are organized as follows. The system modeling and problem formulation section establishes the kinematic model of AGV in the global coordinate system and develops the pose error model in the presence of external disturbances. In the unknown external disturbance compensation section, the EESO that combines with state observer and RBF neural network is designed. In the sliding mode controller design section, the improved variable speed reaching law is developed while the sliding mode path tracking controller is proposed. The simulation results section validates the effectiveness of the proposed method through three simulation experiments. Finally, the conclusions are presented in the final section.
System modeling and problem formulation
In order to analyze the two-wheel differential drive AGV path tracking problem and design an appropriate controller, the following assumptions and lemmas must first be kept in mind.
Assumption 1. For two-wheel differential drive AGV, the angular velocities
Assumption 2. The expected path
Assumption 3. The longitudinal disturbance
Lemma 1. The RBF neural network can approximate any nonlinear function with high accuracy and fast convergence rate. Compared to the multilayer feedforward network, RBF neural network exhibits superior generalization ability and boasts a simple network structure that avoids unnecessary computational complexity. It comprises an input layer, a hidden layer, and an output layer, as shown in Figure 1. The characteristic of the RBF neural network is the absence of weight connections between the input layer and the hidden layer. Instead, it employs radial basis functions as transformation functions for neurons, mapping input vectors to the m-dimensional hidden layer space. The data from the hidden layer is linearly weighted and passed to the output layer, the weights between the hidden and output layers are adjusted by using the adaptive laws. The output y of the RBF neural network can be represented as,



RBF neural network structure diagram.
Kinematics model of AGV
In order to describe the kinematics model of AGV, it is typically necessary to establish both the global coordinate system and the local coordinate system. The motion model of the two-wheel differential drive AGV is illustrated in Figure 2, where XOY is the global coordinate system and

Two-wheel differential drive AGV motion model.
Two-wheel differential drive AGV controls the speed and direction through the speed difference between its two rear wheels. In Figure 2, the angular velocities of the two driving wheels are

As is shown in Figure 2, the kinematic model of AGV can be represented as,

The equation (4) is expressed in matrix form, and the kinematics model of AGV can also be represented as,

AGV pose error model
The schematic diagram of pose error model for AGV path tracking is shown in Figure 3.

Pose error model of two-wheel differential drive AGV.
In order to track the planned state

The pose error of AGV can be represented as,

By solving the time differential of equation (7), the pose error dynamic model of AGV can be represented as,

The pose error model of AGV shown in equation (8) is obtained under the ideal and undisturbed conditions. However, when the AGV operates in the complex environment, it may encounter external interference, causing its motion characteristics to deviate from the ideal kinematic law. In order to make the designed sliding mode path tracking controller more accurately, the external disturbances of AGV need to be considered. Therefore, the longitudinal disturbance and heading angle disturbance are introduced while the transverse motion of AGV is ignored for the sake of simplifying the model and optimizing the computational efficiency, and the error model can be represented as,

Unknown external disturbance compensation
Due to the unknown exterior disturbances, it is necessary to estimate them prior to designing the system control law. Although the traditional extended state observer can estimate the system disturbances, it is burdened by numerous parameters, making parameter tuning a challenging task. In this paper, the state observer based on the tracking error is established and the unknown disturbances are expanded to the new extended states. The estimated values of the longitudinal error and heading angle error obtained from the state observer are used as the inputs of the RBF neural network to derive the new estimated values of the extended states, thus, an EESO is formed. By employing the EESO, the tuning of the parameters related to the extended states are eliminated, and the difficulty of the overall parameter tuning of the system is reduced.
Design of state observer
It can be seen from equation (9) that the disturbances

The designed state observer for the error system (10) can be represented as,

To estimate the unknown disturbances, take

Remark 1. The state equation of a typical second-order nonlinear system (10) is expanded to the fourth-order nonlinear system (12). According on the system (10), the second-order extended state observer (11) is designed to obtain the estimated values of the tracking error. Then the unknown disturbances are expanded to the new states would be estimated by the RBF neural network designed in the disturbance estimation based on RBF neural network section, so the EESO is formed.
Disturbance estimation based on RBF neural network
The weight between the hidden layer and the output layer of the RBF neural network in the EESO is expressed by

The estimation of disturbance



The estimations of disturbances are updated with the adaptive laws (15) and (16), and the adaptive laws determine the degree of change in
Based on the extended states and the estimated values of neural network as shown in equation (14), the longitudinal disturbance


Substituting the disturbance expressions shown in equations (17) and (18) into the error model given in equation (9), the AGV pose error model based on the observations can be represented as,

Stability analysis of EESO that combines with state observer and RBF neural network
Based on equations (10) and (11), the error differential equation can be represented as,

Choose the Lyapunov function V as,


The derivative of equation (21) is as follows,

By substituting the adaptive laws shown in equations (15) and (16) into equation (23), we get

Because of
Sliding mode controller design
In this section, the sliding mode reaching law combining hyperbolic tangent function and special power function is proposed to design the sliding mode path tracking controller, aiming to achieve precise path tracking for AGV. The stability of the proposed sliding mode controller is demonstrated using the Lyapunov function. Furthermore, the RBF neural network is employed to estimate and optimize the controller parameters, reducing system chattering and further enhancing the overall path tracking performance.
Design of AGV sliding mode path tracking controller
To achieve the path tracking control objective, it is necessary to design the sliding mode control law, which contains equivalent control law and the nonlinear control item. In this article, name the nonlinear control item as the improved variable speed control law.
Design of sliding mode equivalent control law
The sliding mode surface is designed as follows,

The derivative of S can be obtained as follows,

According to the sliding mode control theory, set

Design of improved variable speed control law
The improved variable speed control law designed in this paper is obtained by combining fal function and hyperbolic tangent function on the basis of traditional exponential reaching law. The fal function is the nonlinear function that can be represented as,

The traditional exponential reaching law
32
is

When designing the reaching law in this article, the sign function in the traditional exponential reaching law shown in equation (29) is replaced by the fal function, and S is replaced by the hyperbolic tangent function, which can speed up the initial state to reach the sliding mode surface. Hence, the improved variable speed reaching law designed in this article can be designed as bellows,


In order to further improve the system performance, the improved piecewise variable speed reaching law is designed as follows,

When
The variable speed control law

Based on equations (27) and (33), the AGV sliding mode path tracking controller u can be obtained as,

Stability analysis
To prove the stability of the controller, the Lyapunov function is chosen as,

Taking the time derivative of equation (35), we have

Substituting the AGV pose error model (19) and the derivative of sliding mode surface as shown in equation (26) into (36),

Substituting the sliding mode path tracking controller (34) into (37), we have,

Expanding the fal function and the hyperbolic tangent function,
(1) If

(2) If

Let
Parameter estimation of control law based on RBF neural network
The sliding mode control is prone to induce system chattering, thus suppressing system chattering has always been the primary task in the process of designing the sliding mode controllers. When reducing the gain coefficient
After estimating the parameter, the control law can be represented as,

In order to dedicate to suppress the system chattering, consider designing the RBF neural network with

RBF neural network for adjusting gain coefficient.
As shown in Figure 4, the inputs of RBF neural network are sliding mode surface S and its derivative
The input vector can be expressed as,

In order to guarantee the positivity of gain coefficient

The evaluation function J of the neural network is designed as the chattering of the linear velocity, and utilizes gradient descent of the evaluation function to update the parameter of switching control term, with the objective of minimizing the chattering of the linear velocity along the gradient direction. After updating the gain value of the sliding mode switching control term, the improved sliding mode control law can be obtained.
Remark 2. In AGV path tracking control design, the linear velocity typically stands out as more intuitive and easier to measure in terms of ease of operation, and more attention is usually paid to the control of linear velocity as it directly affects the position change and motion speed of AGVs. Moreover, prioritizing the stability of linear velocity over angular velocity optimization is often more crucial. Therefore, it is not significant to study the chattering of the angular velocity, so this article mainly considers the linear velocity chattering of the controller.
The evaluation function J is designed in relation to velocity as follows,

The parameter is updated by calculating the negative gradient of the evaluation function based on the gradient descent method in the following way,


The connection weight

Simulation results
In this section, to substantiate the advantages of the presented improved sliding mode path tracking control method, several comparative experiments have been designed. The method introduced in this study is referred to as improved reaching law, while the power reaching law in Huang et al.
8
and exponential reaching law have been used for comparative experiments. Figure 5 illustrates the sliding mode surfaces obtained using three methods, showcasing their effectiveness in driving the sliding variable into a small neighborhood around the sliding surface. As depicted in Figure 5, the improved reaching law achieves a slightly faster convergence rate compared to the power reaching law presented in Huang et al.
8
and significantly outperforms the exponential reaching law in terms of reaching speed. Consequently, the sliding mode control approach based on the improved reaching law demonstrates a notable advantage in accelerating the system's response. Three kinds of desired tracking paths are used to prove the effectiveness of the sliding mode path tracking control method designed in this article. The three kinds of paths involved in the simulation are straight path, cosine path and elliptical path. In this section, the initial pose of the AGV is set as:

The sliding mode surfaces using three methods.
Case 1: The desired straight path trajectory is set as follows:

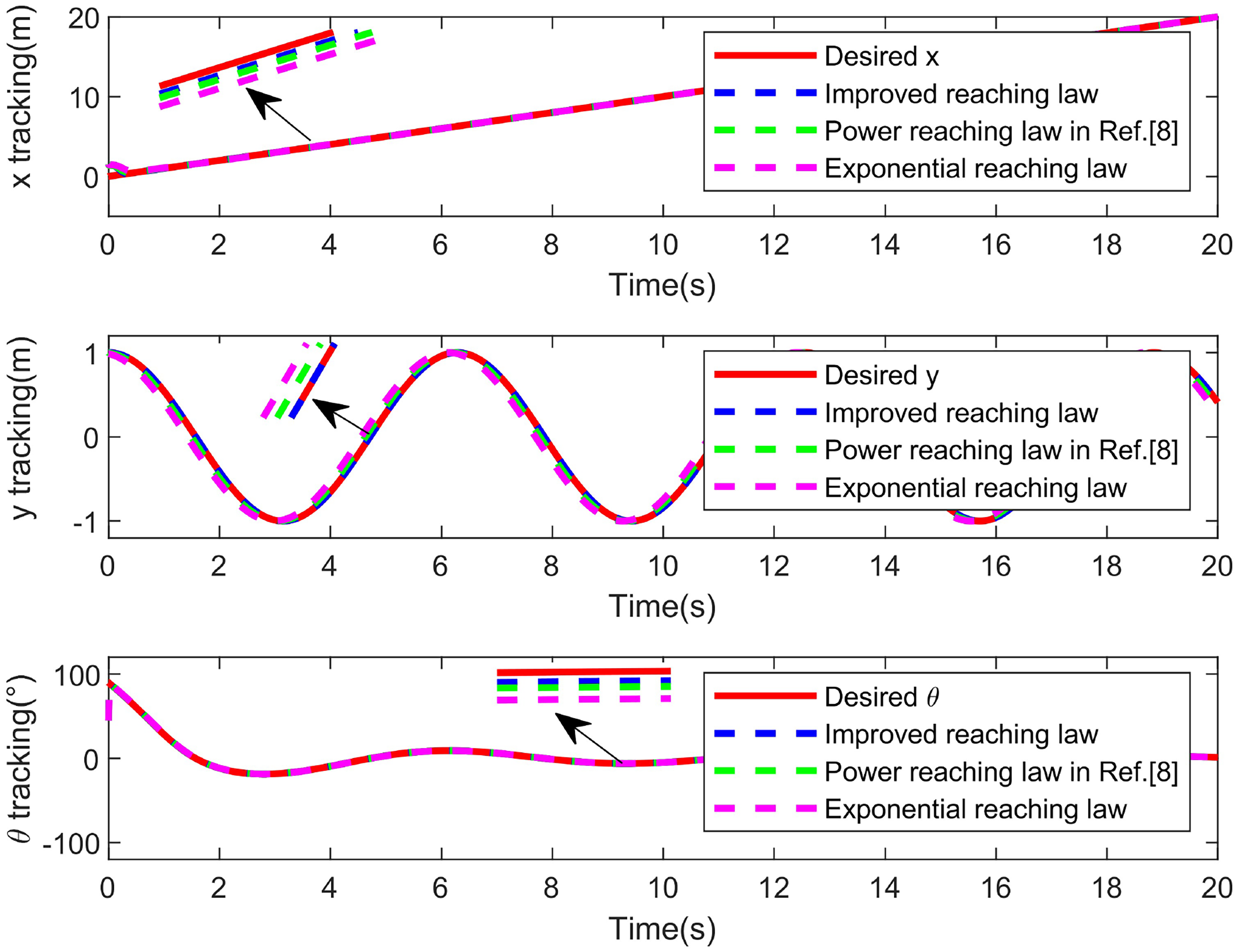
The straight path tracking trajectory for AGV via sliding mode control method with the improved variable speed reaching law, the power reaching law in Huang et al.
8
and the traditional exponential reaching law is shown in Figure 6. The tracking effect of AGV pose variables x, y, and

The path tracking performance under straight path.

The tracking performance of pose variables.

The tracking error of pose variables.

Comparison of RMSEs using three methods.

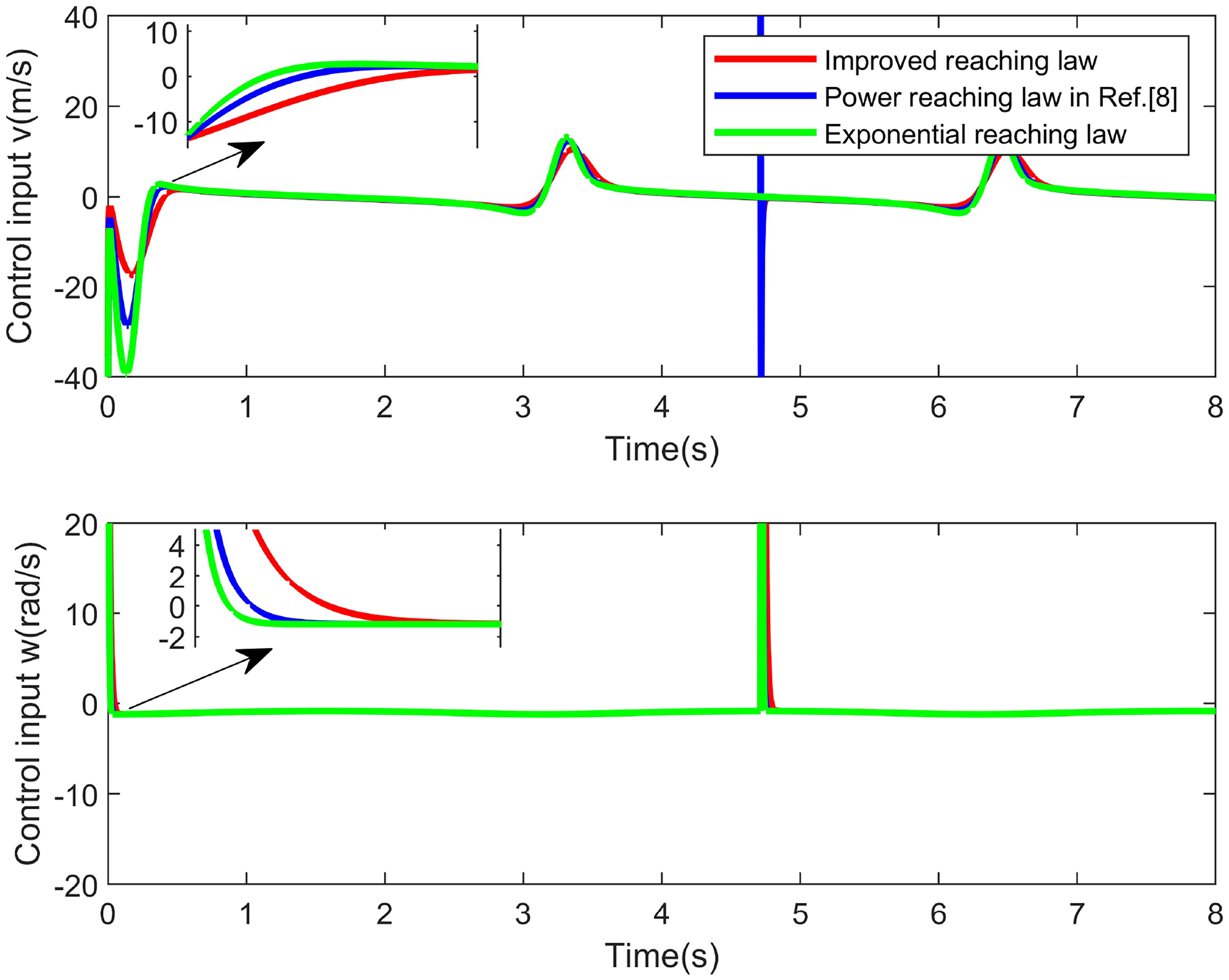
The control curves of two control laws.
The EESO that combines with state observer and RBF neural network and the traditional ESO are used to estimate the longitudinal disturbance and heading angle disturbance respectively. The disturbance estimation results and estimation errors are shown in Figures 11 and 12. The EESO can fit the system disturbance more quickly and accurately than the traditional ESO, and the disturbance estimation errors of the former are smaller.

The estimations of disturbances under EESO and ESO.

The disturbance estimation error under EESO and ESO.
Case 2: The desired cosine path is set as follows,

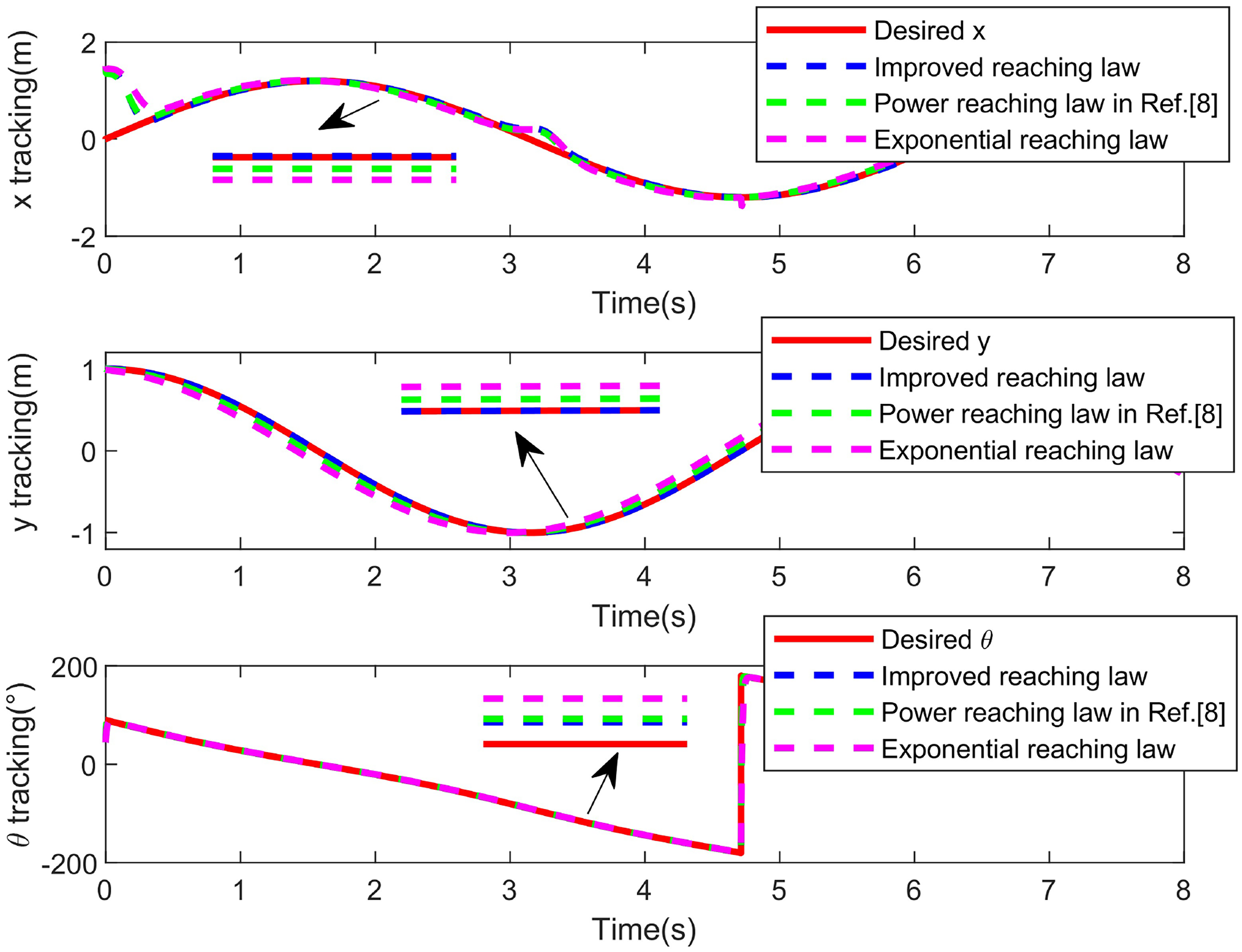
The cosine path tracking performances is given as Figure 13. The tracking effect of AGV pose variables on the cosine path is shown in Figure 14. From the magnified portions of Figures 13 and 14, it's apparent that the tracking path utilizing the improved variable speed reaching law almost coincides with the planned path, whereas the tracking paths using the power reaching law in Huang et al.
8
and traditional exponential reaching law diverge further from the planned path. Figure 15 illustrates the tracking error of AGV pose variables on the cosine path, in which the curves of error 1, 4, and 7 express the tracking error of x, y, and

The path tracking performance under cosine path.
The tracking performance of pose variables.

The tracking error of pose variables.

Comparison of RMSEs using three methods.

The control curves of two control laws.

The estimations of disturbances under EESO and ESO.

The disturbance estimation error under EESO and ESO.
Case 3: The desired elliptical path is set as follows,

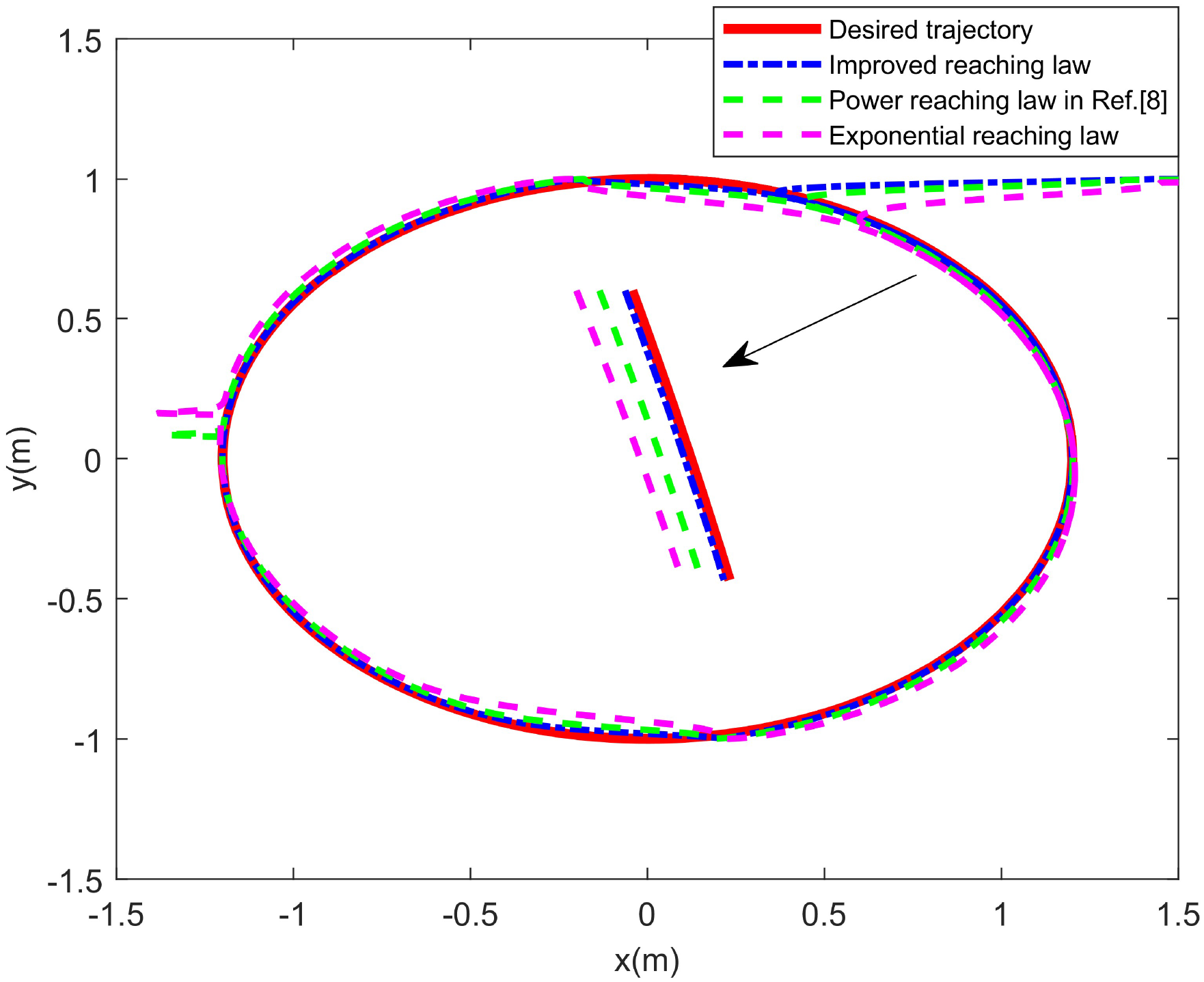
The simulation results for tracking the elliptical path are depicted in Figures 20 and 21. Same as cases 1 and 2, it is evident that the improved variable speed reaching law outperforms the power reaching law in Huang et al.
8
and traditional exponential reaching law in terms of path tracking accuracy. The tracking error of AGV pose variables x, y, and

The path tracking performance under elliptical path.

The tracking performance of pose variables.

The tracking error of pose variables.

Comparison of RMSEs using three methods.
The control curves of two control laws.

The estimations of disturbances under EESO and ESO.

The disturbance estimation error under EESO and ESO.
To intuitively compare the transient performance of the three methods in path tracking, the settling time performance index is used to construct a comparative table. It can be seen from Table 1 that the setting times of the improved reaching law under three curves are significantly smaller than that of using the power reaching law in Huang et al. 8 and traditional exponential reaching law and it is at least 0.27s shorter than the other two methods, meaning that the improved reaching law improves the transient performance of AGV tracking to a large extent.
Setting time of three methods under three curves.

In order to verify the sensitivity of improved sliding mode path tracking control scheme proposed in this paper to external disturbances, the values of longitudinal disturbance
The simulation outcomes for tracking the elliptical trajectory after modifying the disturbances are presented in Figure 27 and the tracking performances of pose variables after modifying the disturbances are shown in Figure 28. It can be seen that the tracking path using the improved variable speed reaching law still fits the expected path better than using the power reaching law in Huang et al.
8
and the traditional exponential reaching law, meaning that the improved variable speed reaching law has the higher tracking accuracy. Figure 29 illustrates the tracking errors of the AGV pose variables x, y, and
The path tracking performance under elliptical path after modifying the disturbances.
The tracking performance of pose variables after modifying the disturbances.

The tracking error of pose variables after modifying the disturbances.

Comparison of RMSEs using three methods after modifying the disturbances.

The control curves of two control laws after modifying the disturbances.

The estimations of disturbances under EESO and ESO after modifying the disturbances.

The disturbance estimation error under EESO and ESO after modifying the disturbances.
To demonstrate the superior control performance achieved through the approximated controller parameters by the RBF neural network, we focus specifically on the elliptical path in Case 3 as an example. The path tracking effects before and after parameter estimation are illustrated in Figures 34–36. In Figure 36, the curves of errors 1, 3, and 5 depict the tracking error using the improved variable speed reaching law, while the curves of error 2, 4, and 6 represent the tracking error obtained using the traditional exponential reaching law. It's evident that the tracking path after the optimization of parameter estimation is closer to the desired path with fast convergence rate, at the same time, the path tracking accuracy has been improved and the system chattering is smaller, which proves the effectiveness of the proposed method. The Figure 37 demonstrates that the control laws after estimating the controller parameters exhibit greater smoothness than before. Furthermore, the disturbance estimation effect of EESO before and after parameter estimation is shown in Figures 38 and 39. It can be seen that the EESO can estimate the system disturbances more accurately after parameter estimation and its disturbance estimation errors are smaller.

The path tracking performances before and after parameter estimation.
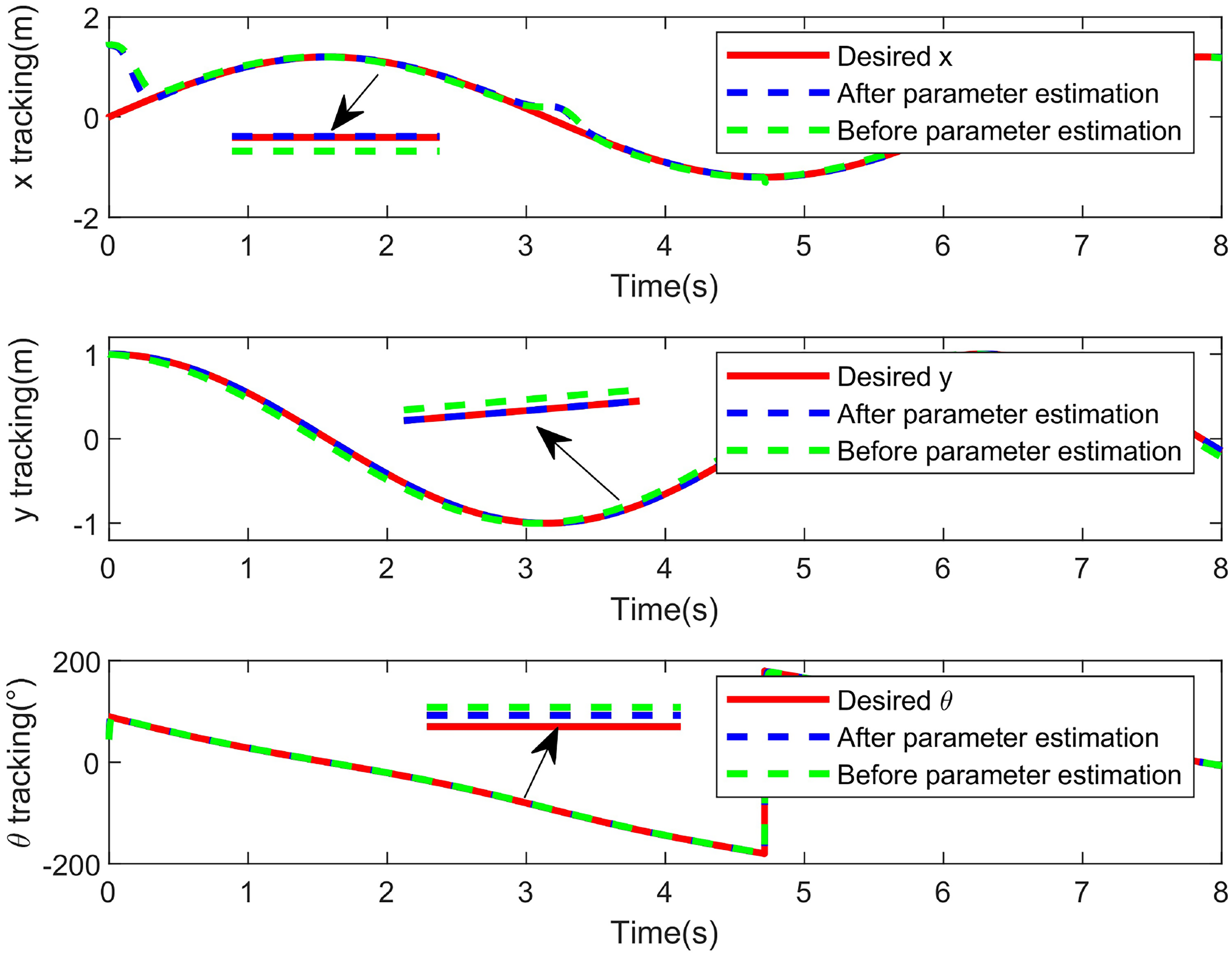
The tracking performance of pose variables.

The tracking error of pose variables.

The control laws of AGV.

The estimations of disturbances before and after parameter estimation using EESO.

The disturbance estimation error before and after parameter estimation using EESO.
Conclusion
In this article, the sliding mode path tracking control scheme has been designed based on the improved piecewise variable speed reaching law and EESO for the AGV under the unknown disturbances. The EESO is used to estimate the unknown disturbances acting AGV, and then the sliding mode path tracking control law is introduced to reduce system chattering and achieve precise path tracking of AGV. By using the EESO and the parameter estimation method based on RBF neural network, the complexity of global parameters setting can be reduced and further suppress system chattering. By comparing the setting times and RMSEs in experiment results, the transient performance of AGV path tracking has improved by 25% and the steady-state performance has improved by 67.2% than the other two methods, meaning that the proposed sliding mode control scheme can guarantee that the AGV achieve the faster and more accurate tracking of the planned path, and the system chattering is reduced after the parameter estimation. In conclusion, the proposed method significantly improves the performance of AGV path tracking. Future work will focus on avoiding static and dynamic obstacles and enhancing real-time adaptability during the path tracking process.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China, Natural Science Foundation of Shandong Province for Innovation and Development Joint Funds, and Natural Science Foundation of Shandong Province (Grant Nos. 62203280, 62273213, ZR2022LZH001, ZR2022MF341, and ZR2023MF067).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.