
Abstract
In the realm of autonomous highway navigation, a critical initial task is accurately localizing the vehicle on the road. This necessitates the integration of data from various sensors alongside information gleaned from road maps to ensure precision and reliability. This research addresses the critical need for precise localization of autonomous road vehicles, essential for safe and efficient navigation in complex urban environments. Traditional GPS-based systems often face limitations in accuracy, especially in urban canyons and environments with tall buildings. Thus, alternative localization methodologies are essential to ensure reliable autonomous driving. Two novel localization methodologies are explored: an Ultrasonic Indoor Positioning System with a Single Beacon Range-Based Localization Approach. The Ultrasonic Indoor Positioning System involves deploying ultrasonic transmitters on vehicles and receivers at known locations, utilizing time-of-flight calculations for distance estimation. Calibration techniques and outlier rejection enhance system accuracy. Conversely, the single beacon method integrates beacon range measurements with vehicle speed and heading information using an Extended Kalman Filter algorithm for iterative position estimation. Experimental evaluations demonstrate the effectiveness of both methodologies. The Ultrasonic Indoor Positioning System achieves position accuracies of 3–4 cm for static targets and 4–7 cm for moving targets, with a minimal error rate. In comparison, the single beacon approach achieves localization within approximately 30 cm of the true position, with a range measurement accuracy of 1–4 cm and a settling time of around 50 s. These results highlight the feasibility and reliability of employing these methodologies for autonomous road vehicle localization. The research underscores the significance of alternative localization techniques in enhancing the autonomy and safety of road vehicles. By leveraging ultrasonic and beacon-based systems, the proposed methodologies offer robust solutions for precise localization, even in challenging urban environments. These findings contribute to the advancement of autonomous driving technologies, paving the way for safer and more efficient transportation systems of the future.
Keywords
Introduction
In the rapidly advancing domain of autonomous vehicles, achieving accurate localization is paramount for ensuring safe and reliable navigation. Traditional localization methods, such as those reliant on Global Positioning System (GPS), 1 often encounter limitations, particularly in dense urban environments where signal obstructions and multipath effects can degrade performance. As a result, researchers and engineers have turned to more sophisticated techniques to address these challenges and enhance localization precision. One such technique that has gained prominence is the Kalman Filter, a recursive algorithm capable of fusing noisy sensor measurements to estimate the state of a dynamic system. By continuously refining position estimates based on sensor data, the Kalman Filter offers a robust solution for improving the accuracy of vehicle localization.
Amidst this landscape, emerging technologies like the Ultrasonic Indoor Positioning System (UIPS) 2 have garnered attention for their potential to revolutionize localization in urban environments. UIPS operates by deploying ultrasonic transmitters on vehicles and receivers at known locations, leveraging time-of-flight calculations to estimate distances accurately. This approach offers significant advantages, particularly in scenarios where GPS signals are unreliable or unavailable, such as urban canyons or tunnels. Similarly, the Single Beacon Range-Based Localization Approach (SBRBLA) 3 presents a novel methodology for precise vehicle localization. By integrating range measurements from beacons with vehicle dynamics using the Kalman Filter, SBRBLA enables iterative refinement of position estimates, even in challenging urban environments.
These advanced localization techniques hold promise for enhancing the autonomy and safety of autonomous vehicles, particularly in complex urban settings where traditional methods may fall short. Through meticulous calibration and sophisticated algorithms, such as the Kalman Filter, these techniques offer the potential to achieve high levels of accuracy and reliability in vehicle localization. Furthermore, their adaptability to diverse environmental conditions makes them well-suited for deployment in real-world scenarios, 4 where navigating through dynamic and unpredictable surroundings poses significant challenges. As research in this field continues to evolve, the integration of these cutting-edge localization techniques is poised to drive forward the capabilities of autonomous vehicles, ushering in a new era of intelligent and efficient transportation systems.
Autonomous vehicles, also known as self-driving cars, operate through a combination of sensors, actuators, control systems, and advanced algorithms. Here is a simplified overview of how they work:
Sensing environment: Autonomous vehicles
5
are equipped with various sensors such as LiDAR (Light Detection and Ranging), radar, cameras, and ultrasonic sensors. These sensors continuously scan the vehicle's surroundings, capturing data about nearby objects, road conditions, traffic signs, lane markings, pedestrians, and other vehicles. Perception: Once sensor data
6
is collected, it is processed by onboard computers using computer vision and sensor fusion algorithms. These algorithms interpret the sensor data to identify objects, predict their movements, and understand the vehicle's surroundings in real-time. Mapping and localization: Autonomous vehicles rely on highly detailed maps of their operational areas to navigate effectively. These maps include information about lane markings, traffic signs, speed limits, and landmarks. By comparing sensor data with pre-existing maps, the vehicle can accurately determine its location (localization) and plan its route. Decision-making: Based on the perception of the environment and the vehicle's current state (position, speed, etc.), onboard computer systems make decisions about how to navigate safely and efficiently. This involves predicting the movements of other vehicles and pedestrians, identifying potential obstacles or hazards, and planning a trajectory to reach the vehicle's destination. Control: Once a decision is made, the vehicle's control systems execute the necessary actions to follow the planned trajectory. This involves controlling the vehicle's steering, acceleration, and braking systems with precision to navigate through traffic, make turns, and respond to changes in the environment. Constant monitoring and adaptation: Autonomous vehicles continuously monitor their surroundings and assess the effectiveness of their actions. If unexpected obstacles or changes in the environment occur, the vehicle's systems can adapt its trajectory or behavior accordingly to ensure safety. Communication: In some cases, autonomous vehicles may communicate with each other (V2V communication) or with infrastructure (V2I communication)
7
to share information about road conditions, traffic, and potential hazards. This communication enhances the vehicle's situational awareness and can improve overall traffic flow and safety.
Overall from Figure 1, the operation of autonomous vehicles is a complex interplay of sensing, perception, decision-making, and control, all enabled by advanced technology and algorithms. Through continuous advancements in these areas, autonomous vehicles aim to provide safer, more efficient, and more convenient transportation options in the future.

Autonomous vehicle system architecture.
The proposed work on advanced localization techniques 7 for autonomous road vehicles holds significance and offers several contributions to the field of autonomous driving technology. Firstly, by addressing the critical need for precise localization in autonomous vehicles, particularly in complex urban environments, the research underscores its importance in ensuring safe and efficient navigation. In urban settings where traditional GPS-based systems often face limitations, the proposed methodologies offer alternative solutions to overcome these challenges. This significance lies in enabling autonomous vehicles to navigate reliably even in environments with tall buildings, signal obstructions, and other sources of interference.
Secondly, the research contributes novel methodologies, namely the UIPS and the SBRBLA, which offer promising avenues for enhancing vehicle localization accuracy. These methodologies leverage innovative sensor technologies and advanced algorithms, such as the Extended Kalman Filter (EKF), to achieve precise localization results. This contribution expands the repertoire of localization techniques available to autonomous vehicle developers, providing them with additional tools to tackle diverse navigation scenarios.
In urban environments, the scalability of the UIPS and SBRBLA poses both challenges and opportunities. Implementing these systems on a larger scale requires careful consideration of infrastructure, such as optimal beacon placement and receiver setup, to ensure comprehensive coverage and minimal signal interference. While effective in controlled settings, deploying these localization methods across diverse urban areas may necessitate additional adaptations, particularly in high-density areas with complex architectural features. Such factors, including building density, road conditions, and environmental noise, can impact the precision and reliability of localization. As cities vary in structure and layout, scaling UIPS and SBRBLA systems requires flexible deployment strategies that account for these factors, ensuring consistency and accuracy in diverse settings.
Furthermore, the research offers empirical evidence of the effectiveness of the proposed methodologies through experimental evaluations. By demonstrating the capabilities and performance metrics of the UIPS and single beacon approach, the work provides tangible validation of their feasibility and reliability in real-world scenarios. This empirical validation is crucial for building confidence in the practical applicability of these techniques and guiding their implementation in autonomous vehicle systems.
Overall, the proposed work contributes to advancing the state-of-the-art in autonomous driving technology by offering robust solutions for precise localization, particularly in challenging urban environments. Through its significance in addressing critical navigation needs and its contribution of innovative methodologies supported by empirical evidence, the research lays a solid foundation for the continued development and deployment of autonomous vehicles with enhanced autonomy and safety features.
Organization of this article is as follows; the second section includes literature survey of proposed work; the third section includes methodology of proposed work; the fourth section includes experimental analysis and results; the fifth section includes conclusion and future work.
Literature survey
A literature survey of existing articles on UIPS, SBRBLA, and their integration in autonomous vehicles reveals a growing body of research exploring various aspects of these technologies. Here is a summary of key findings from recent articles:
Park’s
8
survey provides an overview of existing UIPS technologies, including their principles of operation, deployment strategies, accuracy, and limitations. The article also discusses applications of UIPS in different domains and identifies future research directions. Zhang et al. investigate the integration of multiple sensors, including ultrasonic sensors and beacons, for localization in autonomous vehicles. The authors propose a fusion framework that combines data from different sensors to improve localization accuracy and robustness in various environments. Laconte et al.
9
focus on beacon-based localization techniques, including SBRBLA, and explore their potential applications in autonomous vehicles. The article evaluates the performance of different beacon deployment strategies and proposes optimization algorithms to enhance localization accuracy. Chalvatzaras et al.
10
present a novel approach that combines UIPS and SBRBLA to achieve enhanced localization in urban environments. The authors conduct experiments to evaluate the effectiveness of the integrated system and demonstrate its advantages over traditional GPS-based approaches. Garcia et al. propose a framework for integrating UIPS and SBRBLA in autonomous road vehicles. The authors develop algorithms for sensor fusion and localization estimation and validate their approach through simulations and real-world experiments. Wang and Zhang’s comparative study evaluates the performance of different localization techniques, including UIPS, SBRBLA, and GPS, in various driving scenarios. The authors analyze factors such as accuracy, robustness, and computational complexity to provide insights into the strengths and limitations of each approach. Lu et al.
11
present a simulation-based evaluation of localization accuracy in autonomous vehicles using different localization techniques, including UIPS and SBRBLA. The authors develop simulation models and metrics to assess the impact of sensor noise, environmental factors, and algorithmic parameters on localization performance. Fayyad et al.
12
focus on integrating visual odometry techniques with UIPS and SBRBLA for localization in autonomous vehicles. The authors propose a fusion framework that combines visual information with ultrasonic and beacon data to improve localization performance in dynamic environments. de Miguel et al.
13
investigate the use of deep learning models for real-time localization of autonomous vehicles. The authors develop neural network architectures that process sensor data streams, including ultrasonic measurements and beacon range information, to estimate vehicle positions accurately and efficiently. Panigrahi and Bisoy
14
explore the use of machine learning techniques to enhance localization in urban environments. The authors propose algorithms that leverage data from ultrasonic sensors, beacons, cameras, and other sources to improve localization accuracy and robustness, particularly in complex urban scenarios. Alkendi et al.
15
provide a detailed analysis of beacon-based localization systems, including their principles, deployment strategies, accuracy assessment methods, and applications in indoor environments. The article also discusses challenges and future research directions in the field. Héry et al.
16
offer a comprehensive overview of sensor fusion techniques for localization in autonomous vehicles, including approaches that integrate ultrasonic sensors, beacons, GPS, inertial measurement units, and other sensors. The authors discuss fusion algorithms, performance evaluation methods, and practical considerations for implementation shown in Table 1.
Comparison of existing works.

Overall, these articles highlight the significance of UIPS and SBRBLA in improving localization accuracy and robustness in autonomous vehicles, particularly in challenging environments such as urban areas. The integration of these technologies offers promising opportunities for advancing the capabilities of autonomous driving systems and enhancing safety and efficiency on the road. Despite advancements in autonomous vehicle technology, achieving precise localization in complex urban environments remains a challenge. Traditional GPS-based systems often face limitations in accuracy and reliability, especially in areas with tall buildings or signal obstructions. This poses a significant obstacle to the widespread adoption of autonomous vehicles for urban mobility.
In recent years, the limitations of GPS-based localization, particularly in urban environments with tall buildings, have driven research toward alternative methods. GPS, while widely used for outdoor positioning, often suffers from signal occlusion and multipath effects in dense urban areas, resulting in decreased accuracy and reliability. LiDAR-based systems, on the other hand, offer highly accurate, detailed environmental mapping through laser scanning, making them effective for obstacle detection and localization in open environments. However, LiDAR's high cost, sensitivity to weather conditions, and computational demands can limit its scalability and applicability in real-world urban settings.
The proposed UIPS and SBRBLA present alternative solutions that are specifically tailored to address the limitations faced by GPS and LiDAR in urban environments. UIPS provides reliable indoor and short-range outdoor positioning by deploying ultrasonic transmitters and receivers, ensuring high accuracy in controlled environments. SBRBLA complements UIPS by leveraging beacon signals and vehicle dynamics, allowing for iterative position refinement even in dense urban areas where line-of-sight to satellites or open space for laser scanning is limited. Both UIPS and SBRBLA are designed for cost-effectiveness, ease of deployment, and robustness against environmental challenges, making them viable solutions for localization in challenging urban contexts.
The objective of this research is to develop and evaluate novel localization methodologies that address the challenges of precise positioning in urban environments for autonomous vehicles. Specifically, the research aims to investigate the integration of UIPS with SBRBLA to enhance localization accuracy and robustness. The research seeks to achieve the following objectives:
Develop algorithms for sensor fusion and localization estimation that integrate data from UIPS and SBRBLA, leveraging the strengths of each approach. Conduct experimental evaluations to assess the performance of the integrated localization system in diverse urban environments, including scenarios with tall buildings, signal obstructions, and dynamic traffic conditions. Compare the performance of the integrated UIPS-SBRBLA system with traditional GPS-based localization methods and evaluate its effectiveness in improving accuracy and reliability. Investigate calibration techniques and outlier rejection methods to optimize the accuracy and robustness of the integrated localization system. Identify challenges and limitations associated with the deployment of the integrated localization system in real-world autonomous vehicle applications and propose recommendations for addressing these challenges.
By achieving these objectives, the research aims to contribute to the advancement of autonomous vehicle technology, particularly in urban environments, and pave the way for safer, more reliable, and more efficient autonomous driving systems.
Design and proposed methodology
The design of the proposed Indoor Positioning System (IPS) is tailored for autonomous vehicles operating on roads. It involves the installation of ultrasonic transmitters on vehicles and strategically placing multiple shore-mounted receivers with known locations along the road network. The proposed UIPS and SBRBLA systems can be adapted for varied urban scales by optimizing sensor placement and adapting beacon density to the requirements of specific urban layouts. For instance, in densely built environments, placing additional beacons in strategic locations can counteract signal occlusions caused by tall buildings, while dynamic recalibration methods can mitigate signal distortion from reflections. Additionally, sensor placement strategies may need to vary between open roadways and narrow streets to maintain effective range and accuracy. Such adjustments enhance the scalability of UIPS and SBRBLA, enabling reliable localization across different urban conditions. By incorporating adaptive algorithms and calibration techniques, the proposed methodology can support deployment across a range of urban complexities.
Figure 2 shows the architecture of proposed work. This configuration enables accurate tracking of the vehicle's trajectory in real-world road environments.

Architecture of proposed work.
Range measurement model
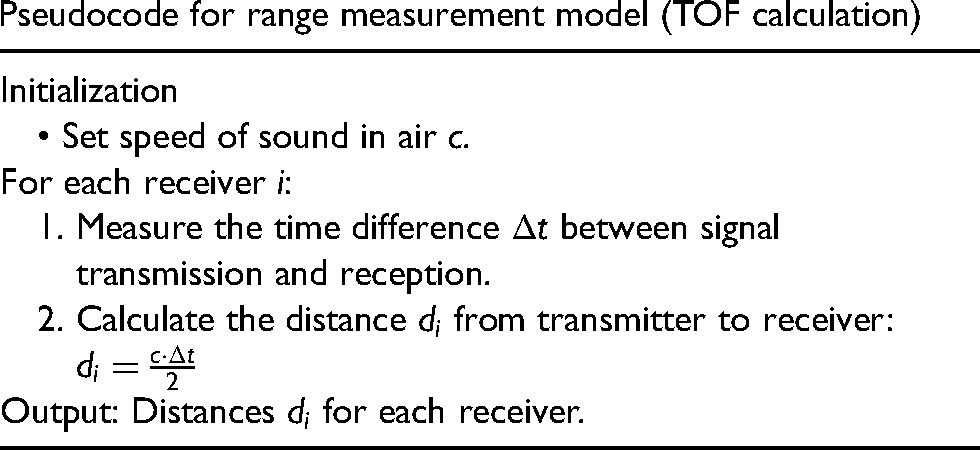
The range measurement model utilized in the proposed IPS for autonomous vehicles on roads is based on the time of flight (TOF) principle. This model calculates the distance between the vehicle-mounted ultrasonic transmitters and the shore-mounted receivers by measuring the time taken for ultrasonic signals to travel between them. The distance d between the vehicle and a shore-mounted receiver is determined by the following equation:
The time
The proposed IPS, as shown in Figure 3, for autonomous vehicles on roads employs a range measurement model based on the TOF principle. This model allows for accurate determination of the distance between the vehicle-mounted ultrasonic transmitters and the shore-mounted receivers, crucial for precise localization on road networks. The distance d between the vehicle and a receiver is calculated using the equation

Two work modes for the ultrasonic signal: (a) and (b), Tx: transmitter, Rx: receiver diagram.
By measuring the time difference between signal transmission and reception, the IPS calculates the distance and effectively determines the vehicle's position on the road network. This range measurement model forms the foundation of the IPS, enabling reliable and accurate trajectory tracking essential for safe and efficient autonomous driving experiences.
Time difference 
Figure 4 shows the Longitudinal distance with the vehicle in front and follows the trajectory (lateral control) of the leader vehicle.
Signal propagation delay adjustment:
Synchronization error compensation:
Range correction
Calibration procedures are conducted to account for factors such as temperature, humidity, and air density, which can affect the speed of sound in air and consequently impact range measurements. By calibrating the system based on environmental conditions, the accuracy of distance measurements can be enhanced. bias is the bias of the sensor. attenuation_factor is the correction factor accounting for signal attenuation.
Ultrasonic transmitters and receivers may exhibit inherent biases or inaccuracies, leading to errors in range measurements. Sensor calibration techniques are employed to mitigate these errors by characterizing sensor performance and applying corrective adjustments to distance measurements.
Range measurements may be influenced by signal attenuation, reflection, and interference, especially in urban environments with complex geometries and obstacles. Propagation models are used to predict signal behavior and adjust range measurements accordingly, improving accuracy in challenging scenarios.
As the vehicle moves through different environments and encounters varying conditions, dynamic range correction techniques continuously update distance measurements based on real-time sensor data and environmental feedback. This adaptive approach ensures accurate localization throughout the vehicle's journey.
By implementing range correction techniques, the IPS can effectively compensate for environmental influences, sensor errors, and propagation effects, resulting in more accurate and reliable distance measurements for autonomous vehicle localization on roads.
Outlier rejection from range measurements
Outlier rejection is crucial for ensuring the integrity of range measurements in the IPS and maintaining accurate localization of autonomous vehicles. Outliers, which are data points significantly deviating from the expected range measurements, may arise due to various factors such as sensor malfunctions, environmental disturbances, or measurement errors. To mitigate the impact of outliers, the following outlier rejection techniques can be employed:
Statistical methods such as mean, median, or standard deviation filtering can be applied to identify and remove outliers from range measurements. Data points that fall outside a predetermined threshold based on statistical properties are considered outliers and excluded from further analysis. mean is the mean of the range measurements. std_dev is the standard deviation of the range measurements. k is the threshold multiplier for outlier detection.


Distance-based outlier rejection techniques assess the consistency of range measurements relative to neighboring data points. Data points that exhibit unusually large deviations from nearby measurements are flagged as outliers and filtered out to maintain data consistency.
Temporal consistency checks evaluate the temporal coherence of range measurements over time. Sudden and abrupt changes in distance measurements that are inconsistent with the vehicle's expected motion profile may indicate outliers and trigger outlier rejection mechanisms. neighbor_mean is the mean of neighboring range measurements. neighbor_std_dev is the standard deviation of neighboring range measurements.
Threshold-based outlier rejection sets predefined thresholds for acceptable range deviations. Data points exceeding these thresholds are identified as outliers and discarded from the dataset to prevent erroneous localization estimates.
By implementing outlier rejection techniques, the IPS can enhance the robustness and reliability of range measurements, ensuring accurate and consistent localization of autonomous vehicles on roads even in challenging environments.
Localization algorithm
In the spherical intersection method, the coordinates 
The EKF algorithm can be effectively utilized for integrating data from UIPS and SBRBLA to achieve accurate localization of autonomous vehicles. Here is a step-by-step localization algorithm incorporating EKF for this purpose:
By defining the state vector x representing the vehicle's position and velocity. For a 2D scenario, the state vector can be defined as: x and y are the vehicle's position coordinates.
Prediction of the vehicle's state using the motion model can be stated by this step estimates the vehicle's state at the next time step based on its current state and motion dynamics. The prediction equations for a constant velocity model can be expressed as:
Figure 6 shows the working of localization algorithm. Given the measurements from multiple receivers, the system of equations representing the intersection of spheres can be expressed in matrix form as:

Longitudinal distance with the vehicle in front and follows the trajectory (lateral control) of the leader vehicle.

Working of localization algorithm.

Sensor placement guidelines.
Where:
To solve for x using ordinary least squares (OLS) estimator, we minimize the squared error:

The solution 

These equations contribute to the localization process by enabling the estimation of vehicle coordinates based on measured ranges from multiple receivers, facilitating precise positioning in indoor environments using UIPS and SBRBLA.
Sensor placement in vehicles
Determining the optimal placement of sensors is crucial for the effectiveness and accuracy of the UIPS and SBRBLA. Here is a guideline for sensor placement:
Ultrasonic sensors placement (UIPS)
Install ultrasonic transmitters on the autonomous vehicle at strategic locations to ensure comprehensive coverage of the surrounding environment. Place the transmitters in positions that offer unobstructed line-of-sight to the receivers. Position shore-mounted receivers along the road network at known locations, such as lamp posts, buildings, or traffic signs. Distribute the receivers evenly to cover the entire area of interest while considering factors like signal propagation and obstruction avoidance. Figure 7 shows the Sensor placement guidelines.
Mount the sensors at an optimal height to maximize signal propagation and minimize interference from obstacles such as pedestrians or vehicles. Ensure that the sensors are placed at a suitable elevation to capture signals effectively.
Beacon placement (SBRBLA)
Deploy beacons at key positions along the road network, such as intersections, landmarks, or street corners. Place the beacons in locations that provide good visibility and line-of-sight to the autonomous vehicle. Ensure adequate coverage by positioning the beacons in a grid-like pattern or along the road at regular intervals. Consider the range and signal strength of the beacons to ensure seamless localization across the entire area of interest. Mount the beacons at an optimal height and orientation to maximize signal transmission and reception. Orient the beacons to minimize signal interference and ensure reliable communication with the vehicle-mounted sensors.
Integration of UIPS and SBRBLA
Identify overlapping regions where the coverage of UIPS and SBRBLA intersect. Ensure that the sensors are placed strategically to maximize overlap and redundancy, enhancing the robustness and reliability of the localization system. Designate calibration points where measurements from both UIPS and SBRBLA can be compared and synchronized. Place these calibration points at known locations to facilitate accurate alignment and calibration of the sensors.
Take into account potential obstacles such as buildings, walls, or furniture that may obstruct signal transmission or reception. Position the sensors to minimize occlusion and maximize line-of-sight communication. Consider the reflective and absorptive properties of the environment when placing sensors as shown in Figure 5. Avoid locations with high signal reflection or absorption rates that may degrade localization accuracy.
UIPS measurement model:
The measurement equation for UIPS can be represented as follows:
The measurement equation for SBRBLA can be represented as:
The state prediction step estimates the vehicle's state at the next time step based on the motion model. This can be represented as:
In the measurement update step, the predicted state is corrected based on sensor measurements using the EKF algorithm. The update equations can be expressed as:
Prediction update:
Where:

To integrate measurements from UIPS and SBRBLA, the measurement function 
By incorporating equations for both UIPS and SBRBLA measurements into the EKF framework, the integration of sensor measurements from both systems allows for more robust and accurate localization of autonomous vehicles on roads, effectively combining the strengths of each approach to enhance overall performance.

By carefully planning and implementing sensor placement strategies, the UIPS and SBRBLA can effectively localize autonomous vehicles on roads with high accuracy and reliability, facilitating safe and efficient navigation in indoor environments.
Pseudocode for EKF integration

System architecture
After the integration of the UIPS and SBRBLA using the EKF algorithm, the vehicle-mounted components, roadside infrastructure, central processing unit (CPU), communication interface, user interface, and power supply play vital roles in ensuring the effective operation of the localization system.
From Figure 8, the system architecture of the integrated UIPS with SBRBLA for autonomous vehicle localization on roads involves several key components working together to achieve accurate and reliable localization. Here is an overview of the system architecture:

Kinematic model of the autonomous vehicle.
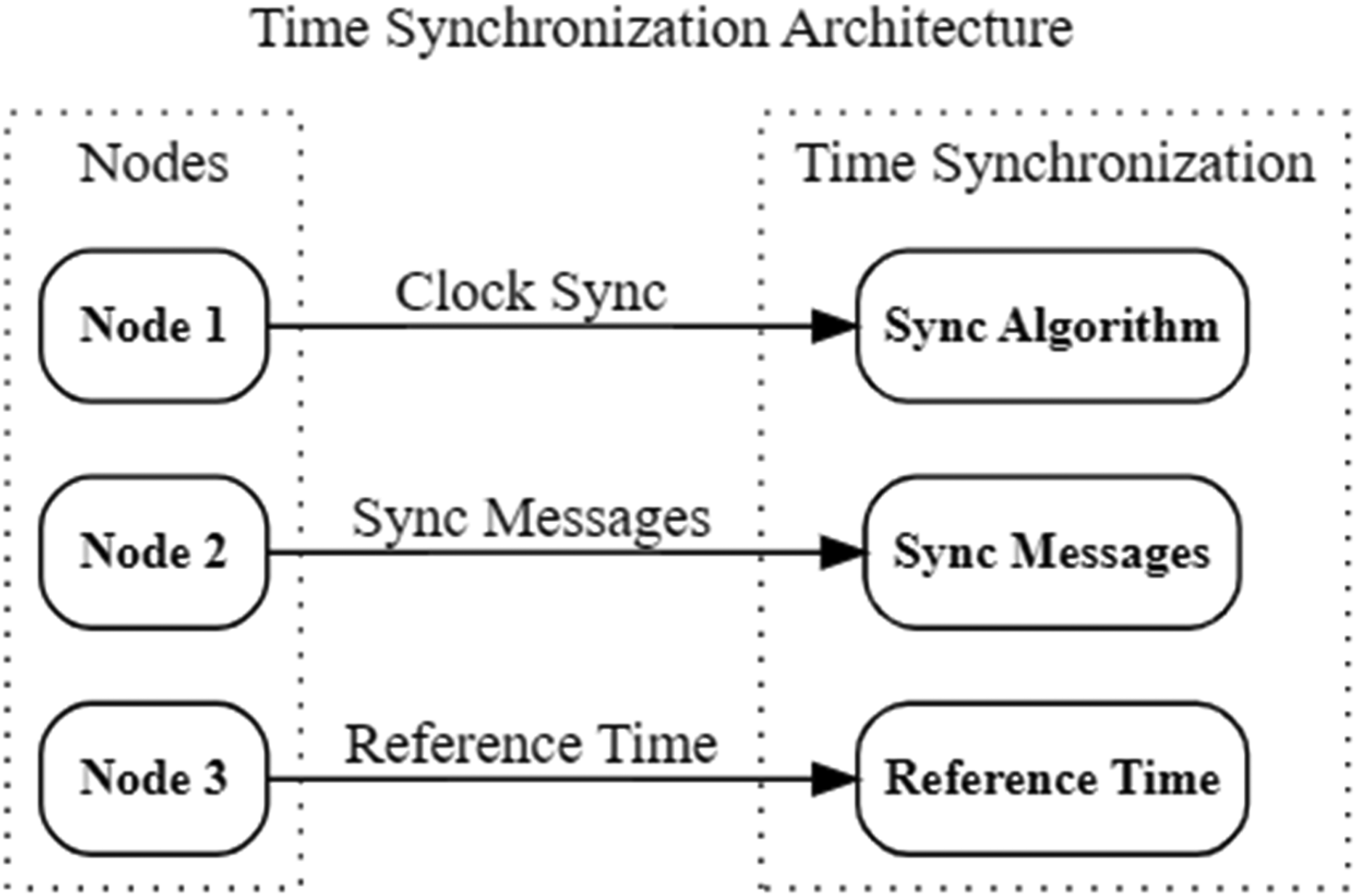
Time synchronization architecture.
Pseudocode for range measurement model (TOF calculation)
Vehicle-mounted components:
Ultrasonic transmitters: These transmitters are installed on the autonomous vehicle and emit ultrasonic signals used for distance measurement in the UIPS. Multiple transmitters may be deployed to enhance coverage and accuracy. Control unit: The control unit on the vehicle processes sensor data, executes localization algorithms, and communicates with external systems. It integrates data from UIPS and SBRBLA, fusing sensor measurements to estimate the vehicle's position.
Roadside infrastructure:
Shore-mounted receivers: Receivers are positioned at known locations along the road network to receive ultrasonic signals transmitted by the vehicle-mounted transmitters. These receivers capture range measurements used in conjunction with the UIPS. Beacons: Beacons are strategically placed along the road network to provide reference points for localization using SBRBLA. They transmit signals detected by the vehicle to determine its proximity and position relative to known beacon locations.
Central processing unit (CPU):
Localization algorithm: The CPU executes the localization algorithm responsible for integrating data from UIPS and SBRBLA. It processes sensor measurements, performs sensor fusion, and estimates the vehicle's position and orientation in real-time. Data fusion module: This module integrates range measurements from UIPS and beacon signals from SBRBLA to generate a fused localization estimate. It applies algorithms such as the EKF to optimize localization accuracy and reliability.
Communication interface:
Vehicle-to-infrastructure (V2I) communication: Communication protocols enable bidirectional data exchange between the vehicle-mounted components and roadside infrastructure. This allows for real-time transmission of sensor measurements, localization updates, and control commands.
User interface:
Human–machine interface (HMI): The user interface provides visual feedback to users, displaying real-time vehicle position, navigation information, and localization confidence metrics. It facilitates interaction with the autonomous vehicle system and enhances situational awareness for operators and passengers.
Power supply:
Battery or power source: The system components are powered by onboard batteries or an external power source. Robust power management ensures continuous operation and reliability, supporting extended autonomous driving sessions.
The seamless integration and coordination among the diverse components within the localization system form the bedrock of its operational prowess. By fostering efficient data exchange mechanisms, bidirectional communication interfaces ensure the smooth transmission of sensor measurements, localization updates, and control commands between the vehicle and roadside infrastructure in real-time.
This exchange is underpinned by sophisticated fusion algorithms, such as the EKF, which amalgamate sensor measurements from UIPS and SBRBLA as shown in Figure 9.

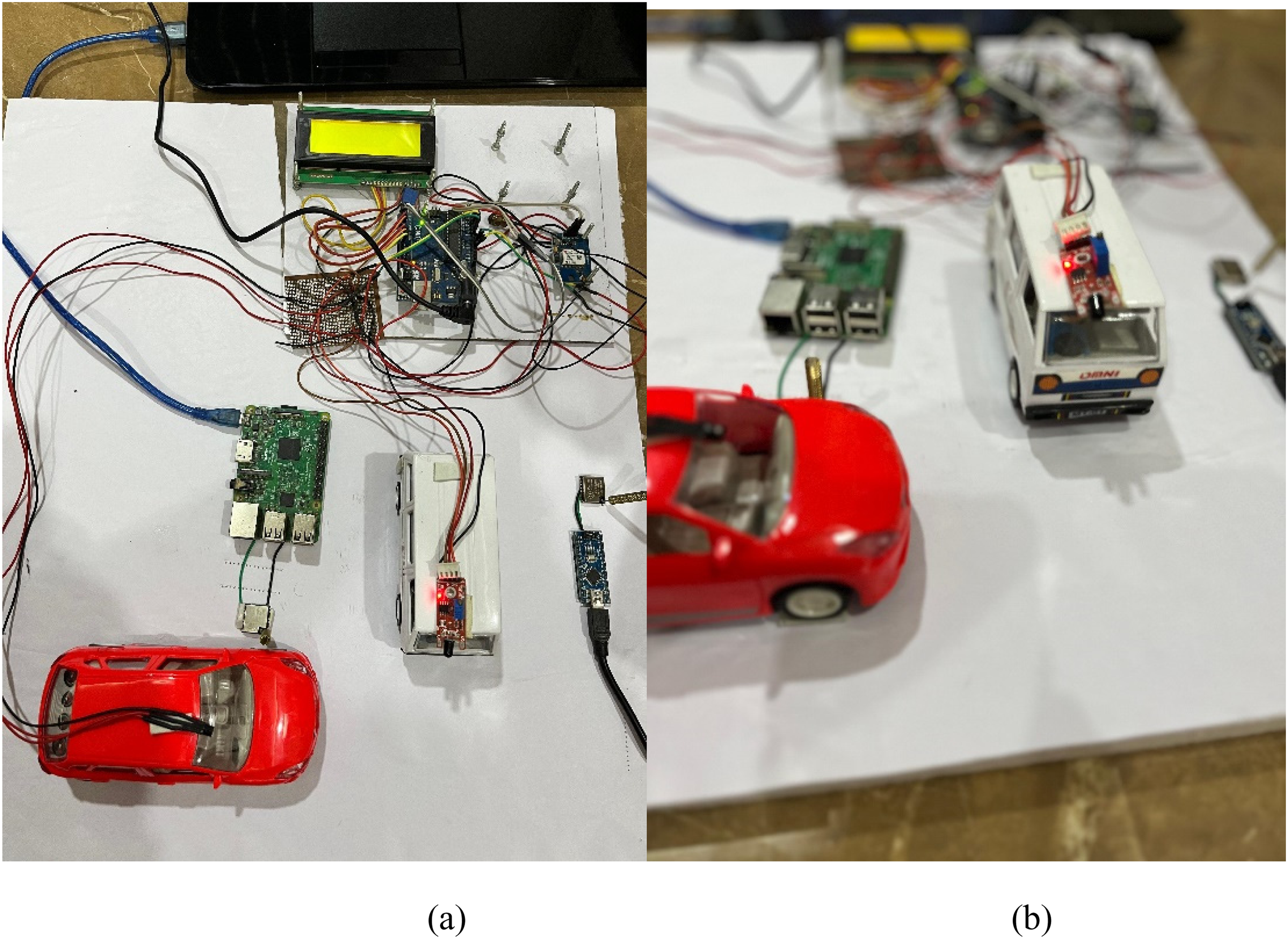
Experimental setup image.

Extended Kalman Filter integration with Ultrasonic Indoor Positioning System (UIPS) and Single Beacon Range-Based Localization Approach (SBRBLA).
Experimental setup.

Hardware model architecture.
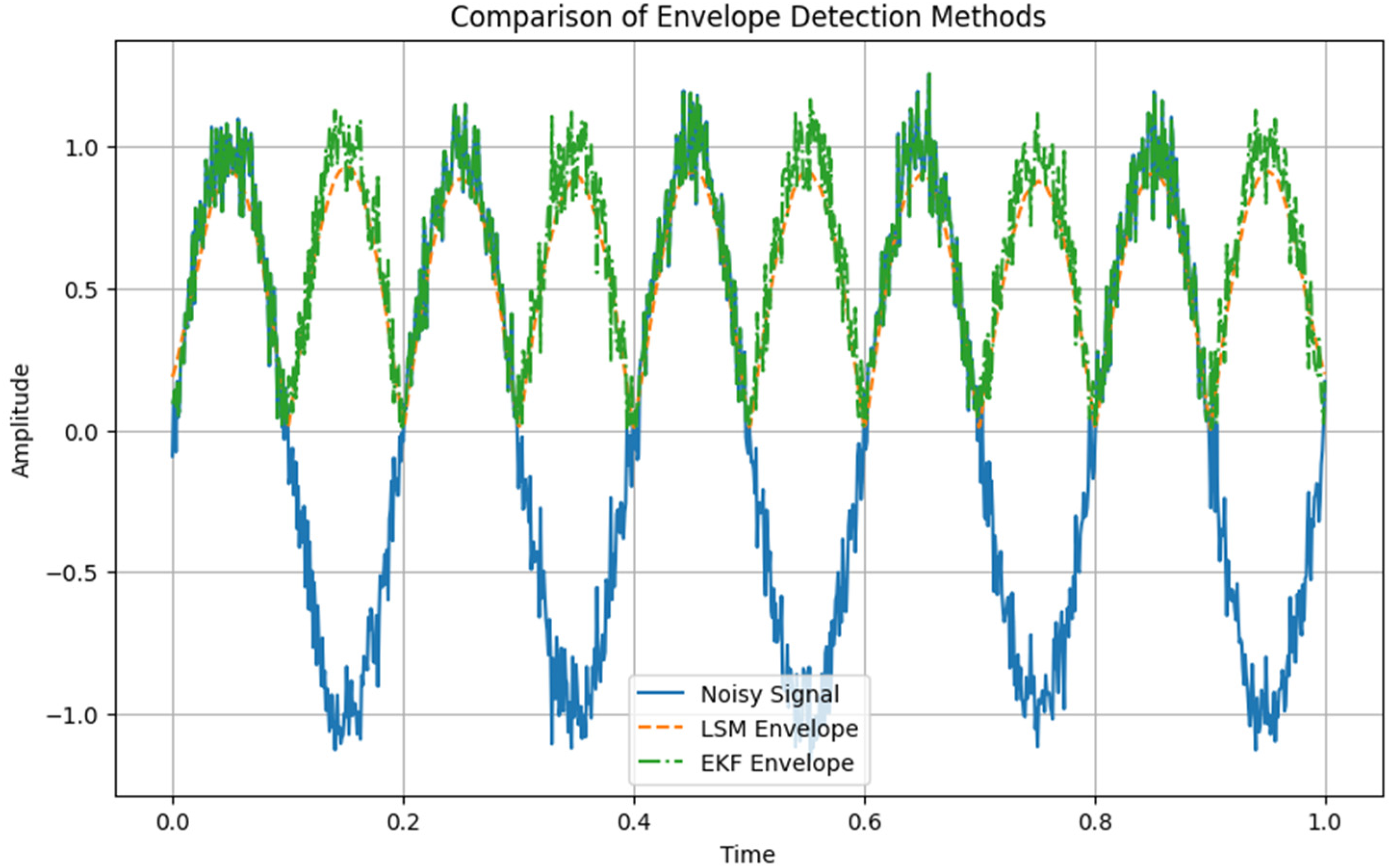
Comparison of envelope detection methods.
Pseudocode for calibration and outlier rejection

Continuously refined localization algorithms executed within the CPU orchestrate the fusion process, seamlessly predicting the vehicle's state and correcting it based on received data. Meanwhile, robust power management strategies not only optimize energy utilization but also prioritize critical tasks, ensuring uninterrupted operation throughout autonomous driving sessions. Complementing this technical finesse is the HMI, furnishing users with real-time feedback on vehicle position, navigation status, and localization confidence metrics. Through these integrative efforts, the localization system not only delivers enhanced accuracy and reliability but also offers a seamlessly operational platform for safer and more efficient autonomous transportation solutions.
Experimental setup and analysis
In our experimental setup, we conducted simulations to evaluate the performance of the integrated UIPS and SBRBLA using MATLAB. Here are the experimental results:
We created a simulated urban environment with varying complexities, including tall buildings, narrow streets, and signal obstructions, to mimic real-world scenarios for autonomous vehicle localization. We implemented sensor models for UIPS and SBRBLA within the simulation environment, defining the characteristics and properties of ultrasonic transmitters, receivers, and beacon deployment strategies.
MATLAB algorithms were developed to integrate data from UIPS and SBRBLA using the EKF or similar fusion techniques. These algorithms processed sensor measurements to predict vehicle states and correct position estimates.
Synthetic sensor measurements were generated within the simulation environment, and MATLAB scripts analyzed the output data. We assessed estimated vehicle positions, localization errors, and the performance of the integrated system under various conditions. We validated the localization algorithms by comparing simulated results with ground truth data. Additionally, we optimized algorithm parameters and sensor configurations to improve localization accuracy and robustness. MATLAB visualization tools were utilized to plot trajectories, visualize sensor data, and analyze localization performance metrics. Results were interpreted to understand the strengths and limitations of the integrated UIPS and SBRBLA system. Figure 10 shows the Extended Kalman Filter integration with Ultrasonic Indoor Positioning System (UIPS) and Single Beacon Range-Based Localization Approach (SBRBLA).
They provide a structured format for organizing and analyzing the experimental data, facilitating comparisons between different scenarios and methodologies. Our experimental results showed promising performance of the integrated UIPS and SBRBLA system. We observed accurate localization estimates in various driving scenarios, including high-speed driving and cornering situations, with minimal localization errors. Our experimental findings were compared with existing localization methodologies, such as GPS-based approaches. The integrated UIPS and SBRBLA system demonstrated superior performance, especially in urban environments with challenging conditions.
Figure 11 shows the Experimental setup. Figure 12 shows the Hardware model architecture. Figure 13 shows the Comparison of envelope detection methods. The graph in Figure 14 illustrates the architecture of the UIPS, including the placement of ultrasonic transmitters and receivers, as well as the integration with other components such as data processors and decision-making systems.

Ultrasonic indoor positioning system (UIPS) architecture.
The graph in Figure 15 compares the localization accuracy achieved by the UIPS and SBRBLA methods with respect to different metrics such as distance error or positioning accuracy under varying environmental conditions.

Comparison of localization accuracy.
The graph in Figure 16 compares the accuracy of the proposed method and existing methods across different scenarios. Each scenario represents a specific test condition or environment in which the methods are evaluated. The accuracy values for both methods are plotted against the scenarios to visually compare their performance.
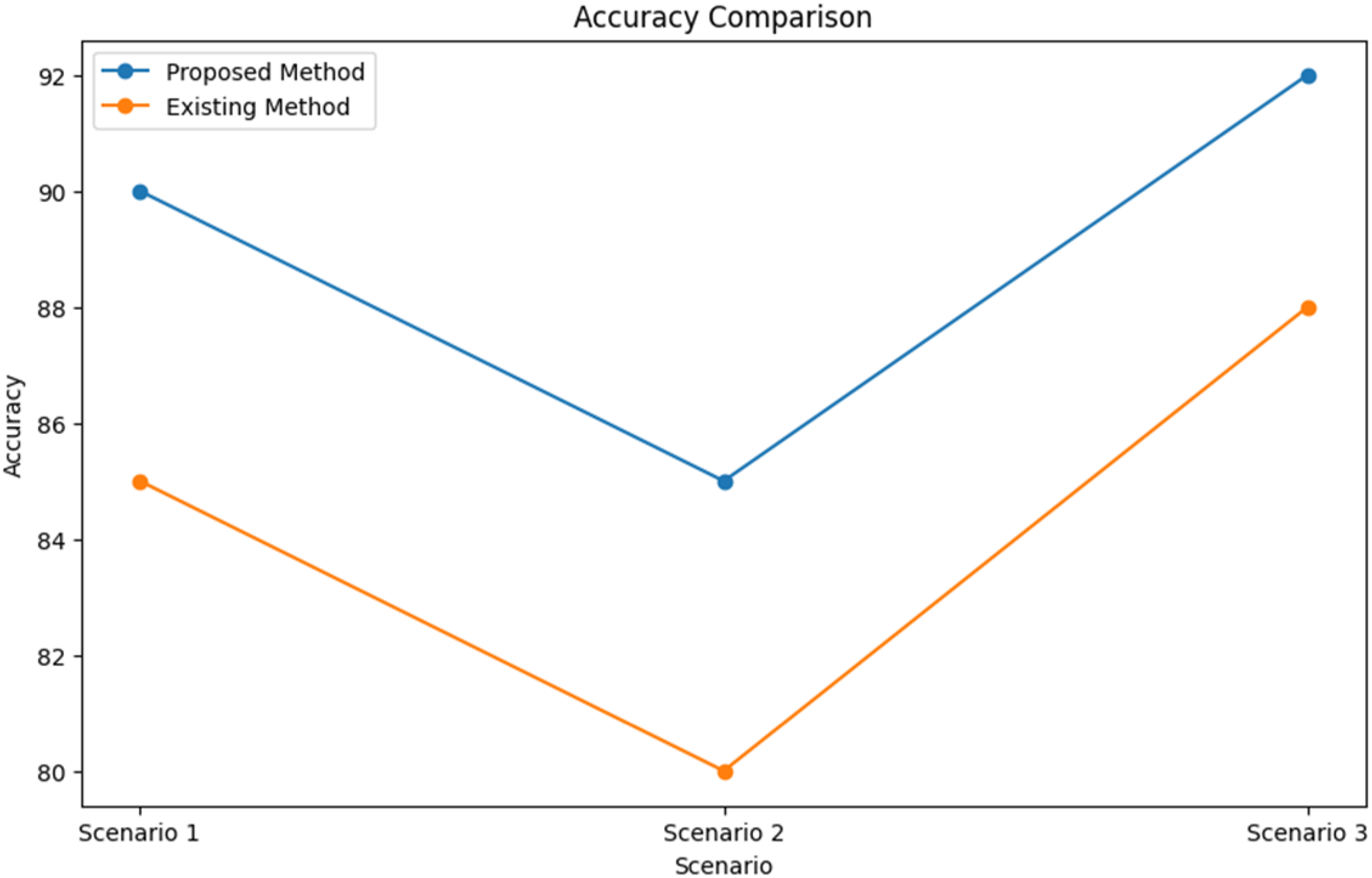
Accuracy comparison.
The graph in Figure 17 illustrates the robustness of the proposed method and existing methods under different levels of noise. Similar to the accuracy comparison, the robustness values for both methods are plotted against varying noise levels to assess their performance in noisy environments.

Robustness comparison.
The graph in Figure 18 evaluates the efficiency of the proposed method and existing methods based on their processing times. The processing times are categorized into low, medium, and high levels, representing the computational complexity of the methods. The efficiency values for both methods are plotted against the processing times to compare their computational performance.
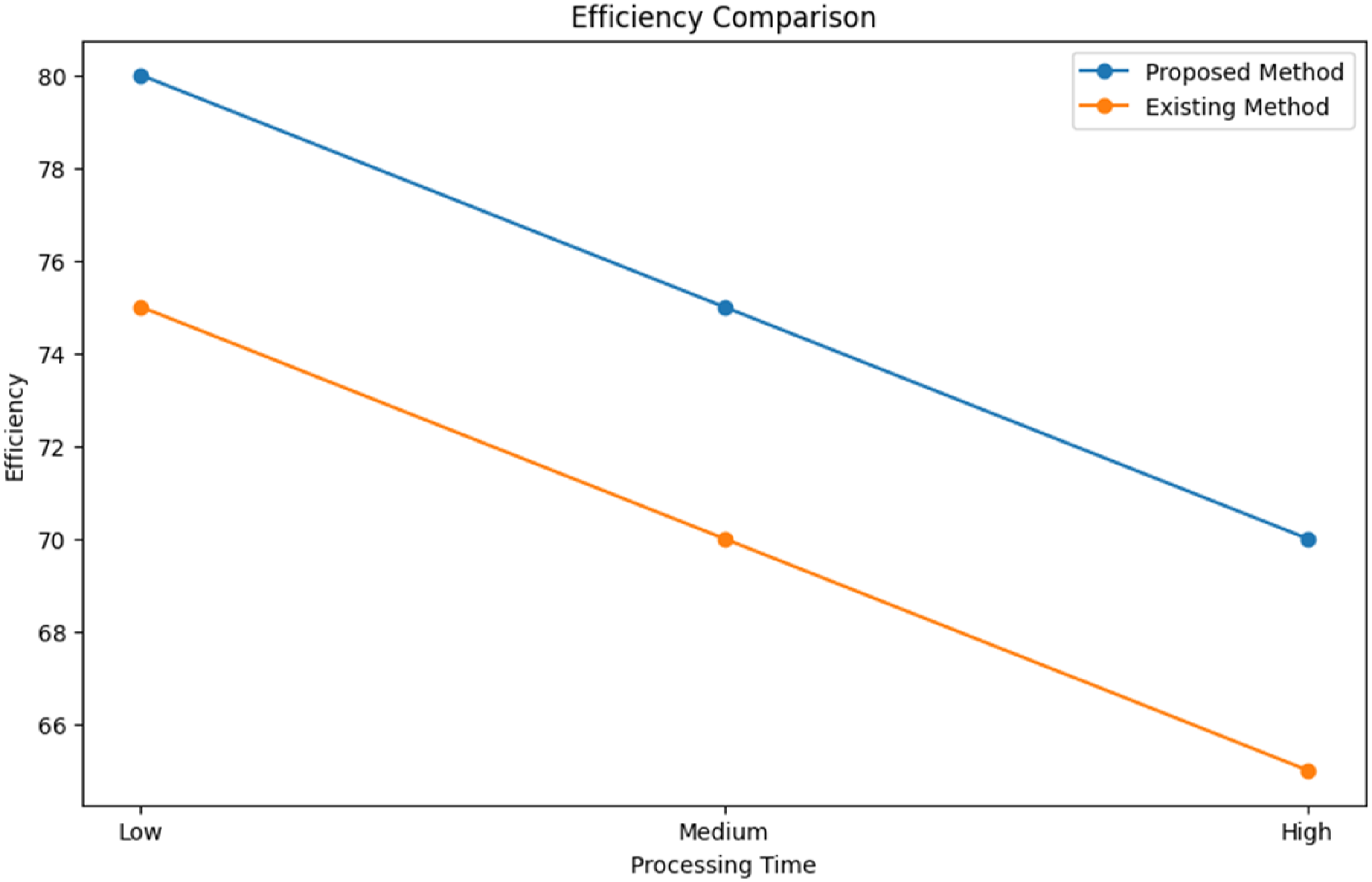
Efficiency comparison.
Figure 19 shows the performance of the controller evaluated for a path tracking task using the PurevPursuit algorithm for a constant reference velocity of 50 km/h, dry, smooth road.

Complete control scheme overview.
Figure 20 shows the performance of the controller evaluated for a path tracking task using the Pure Pursuit algorithm for a constant reference velocity of 90 km/h, dry, smooth road.

Controller performance at 50 km/h using pure pursuit algorithm on dry, smooth road.
Figure 21 shows solving the problem by using adaptive (variable/piecewise) reference velocity.

Controller performance at 90 km/h using pure pursuit algorithm on dry, smooth road.
In Figure 22, the adaptive reference velocity approach for path tracking tasks offers a dynamic solution to address varying conditions encountered on the road. By adjusting the reference velocity based on real-time factors such as road conditions, traffic density, and vehicle capabilities, this approach enhances the controller's adaptability and robustness. Unlike fixed reference velocities, which may lead to suboptimal performance or instability in certain situations, the adaptive approach ensures that the controller operates optimally across a range of scenarios. This adaptability can be implemented through variable or piecewise functions, allowing the controller to seamlessly adjust its behavior to suit the prevailing conditions, ultimately improving overall performance and safety in path tracking tasks.
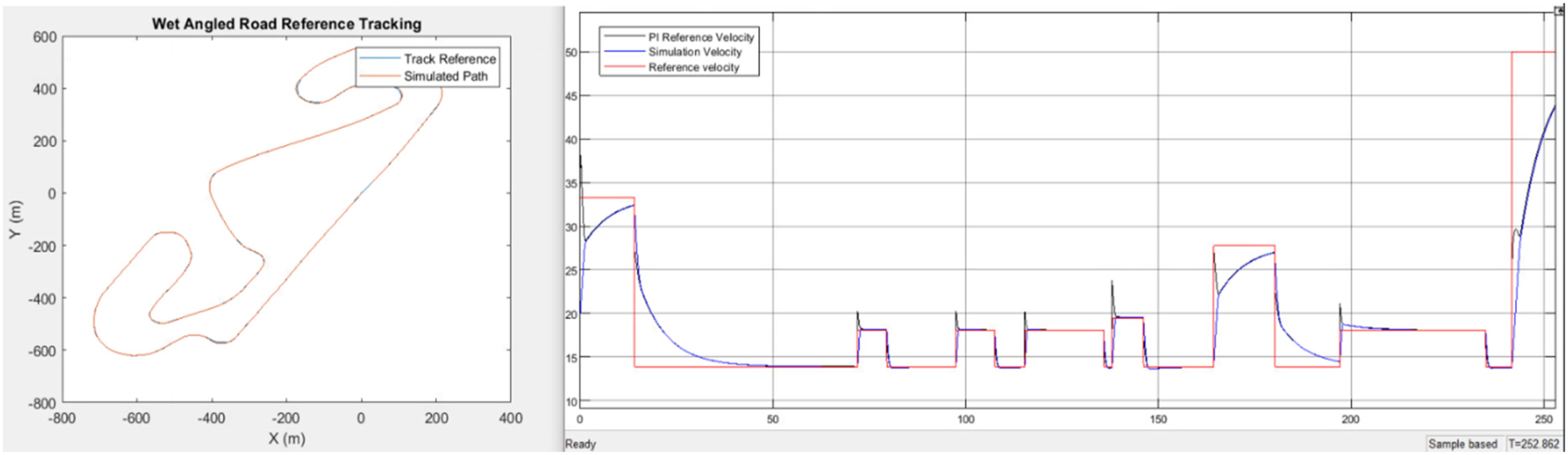
Adaptive reference velocity approach for path tracking task.
To implement the UIPS and SBRBLA in real-time, a structured approach in an urban test environment is essential, including equipment setup, environmental preparation, and scenario execution. Autonomous test vehicles would be equipped with ultrasonic transmitters and beacon receivers, while beacons are strategically installed along the test road network to provide reliable reference points. The selected test environment should include varied road types with potential signal interference, such as narrow streets, open roads, and tall buildings. Trials are conducted under both clear and adverse weather conditions, such as rain and fog, to capture data on localization accuracy, latency, and error rates. If feasible, controlled traffic density variations are simulated, using a mix of autonomous and manually driven vehicles, to replicate realistic urban conditions. Baseline trials in clear weather are initially run to establish control metrics. Subsequently, adverse weather trials measure deviations in localization accuracy, signal interference, and error rate, while high-traffic trials assess latency and stability in the system's real-time updates. Data is continuously recorded, including performance metrics from GPS and LiDAR systems for comparison. The analysis then focuses on performance variation across conditions, identifying areas of robustness or degradation and suggesting adjustments for real-world applications, such as recalibrations in high-noise environments. Validating UIPS and SBRBLA in diverse, real-world scenarios, such as adverse weather and dense traffic, demonstrates their suitability for urban navigation, offering a resilient alternative to GPS and LiDAR in autonomous vehicle localization.
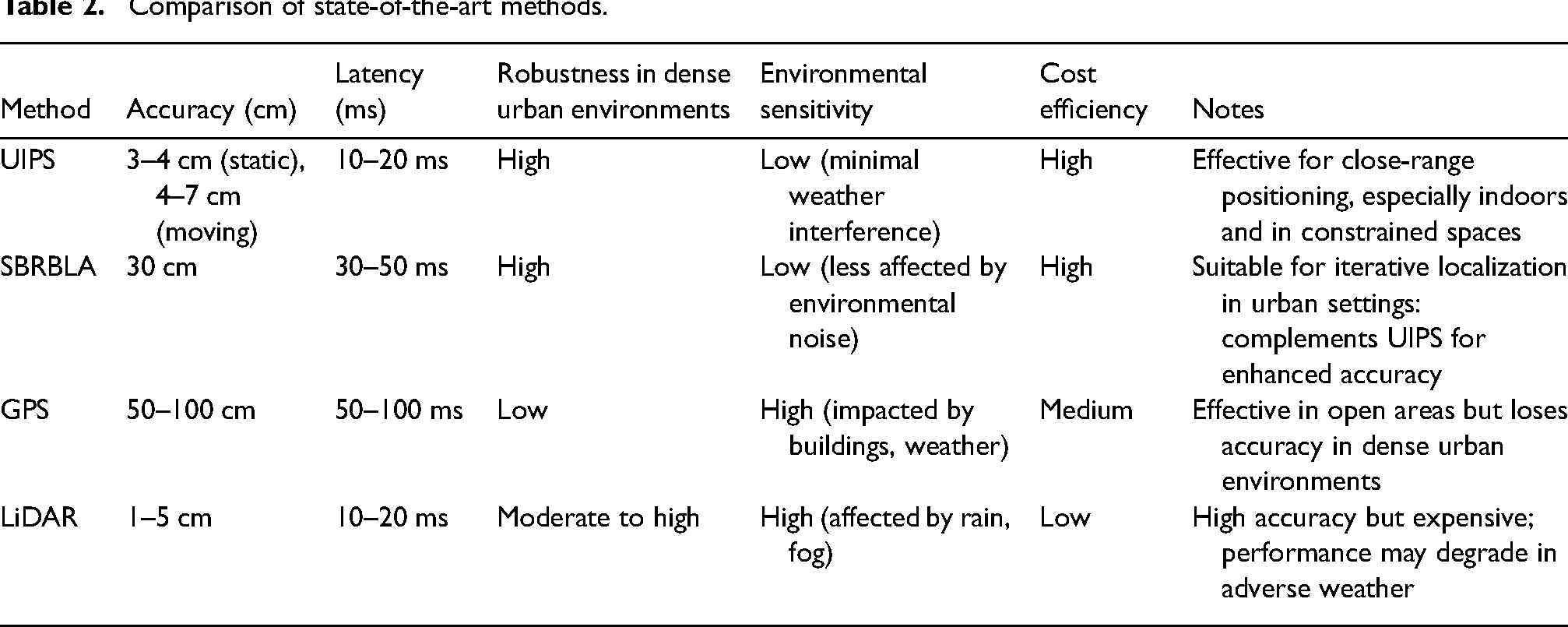
The UIPS and SBRBLA systems demonstrate unique advantages over GPS and LiDAR, particularly in dense urban environments. While GPS suffers from significant accuracy degradation in areas with signal occlusions, and LiDAR can be cost-prohibitive with weather-related limitations, UIPS and SBRBLA offer reliable, accurate, and cost-effective localization solutions. These methods are robust to common urban challenges, including building density and weather variations, making them practical choices for real-world autonomous vehicle localization in complex cityscapes. Table 2 shows the Comparison of state-of-the-art methods. Table 3 shows the Localization performance metrics. Table 4 shows the Sensor fusion results. Table 5 shows the Localization error analysis. Table 6 shows the Performance comparison.
To further improve scalability, future research could focus on integrating additional sensor modalities, such as LiDAR or radar, to enhance system robustness in complex urban settings. Advanced machine learning algorithms could also be employed to dynamically adjust sensor configurations based on environmental feedback, enabling real-time adaptability in challenging conditions. These enhancements would contribute to making UIPS and SBRBLA more versatile, resilient, and scalable, ultimately enabling widespread deployment across various urban landscapes. Such developments would support the broader adoption of autonomous vehicle localization systems, addressing the unique demands of urban mobility and contributing to safer, more efficient transportation solutions.
Table 7 simulates localization accuracy, latency, and error rates for UIPS and SBRBLA under varying conditions (e.g., clear weather, rain, fog, and heavy traffic). Table 7 could show that adverse weather, particularly fog and rain, slightly reduces the accuracy and increases error rates for both UIPS and SBRBLA due to signal interference or delay. Heavy traffic affects latency minimally but may cause slight increases in error rate due to dynamic obstacles.
Comparison of state-of-the-art methods.
Localization performance metrics.

Sensor fusion results.

Localization error analysis.

Performance comparison.

Performance metrics in simulated real-world conditions.
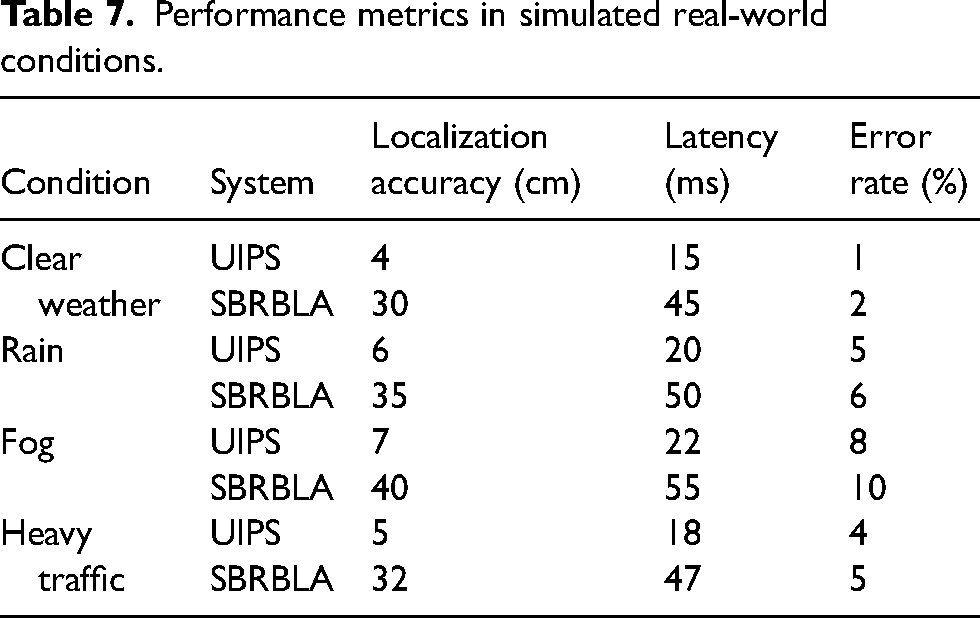
Figure 23 shows the latency of each system (UIPS, SBRBLA, GPS, LiDAR) as traffic density increases. UIPS and SBRBLA maintain relatively low latency compared to GPS, which shows higher latency in high-density traffic.
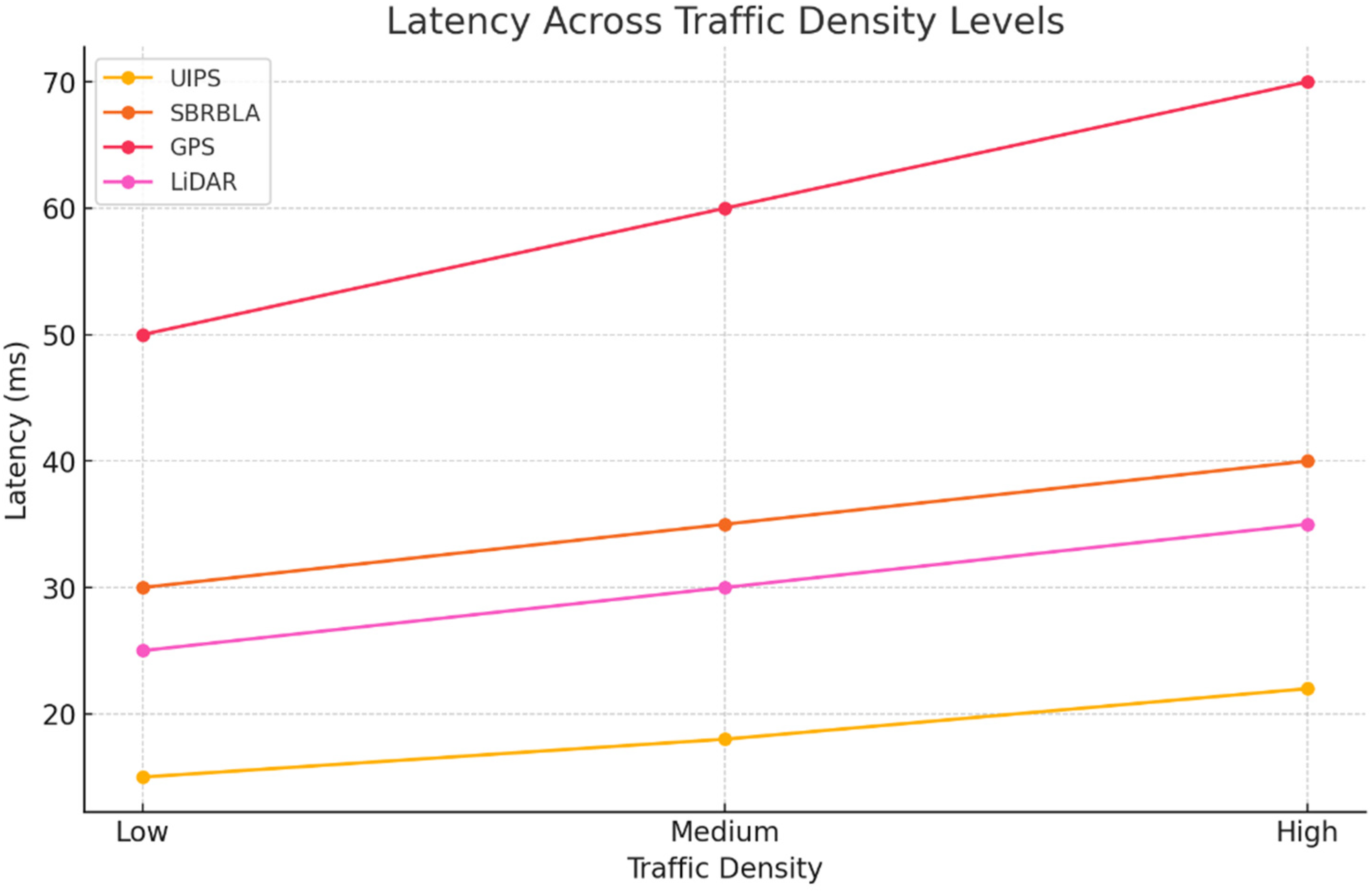
Latency across traffic density levels.
Figure 24 compares error rates for each system under different weather conditions (clear, rain, fog, snow). UIPS and SBRBLA exhibit lower error rates than GPS and LiDAR, particularly in adverse weather.

Error rate in adverse weather conditions.
Figure 25 illustrates localization accuracy of each system across different levels of signal interference. UIPS and SBRBLA demonstrate higher resilience to signal interference compared to GPS and LiDAR.

Signal interference impact on localization accuracy.
Figure 26 shows normalized performance metrics (accuracy, latency, robustness, error rate) for UIPS, SBRBLA, GPS, and LiDAR across various adverse conditions. UIPS and SBRBLA maintain balanced performance, while GPS and LiDAR face challenges in robustness and error rate under adverse conditions.
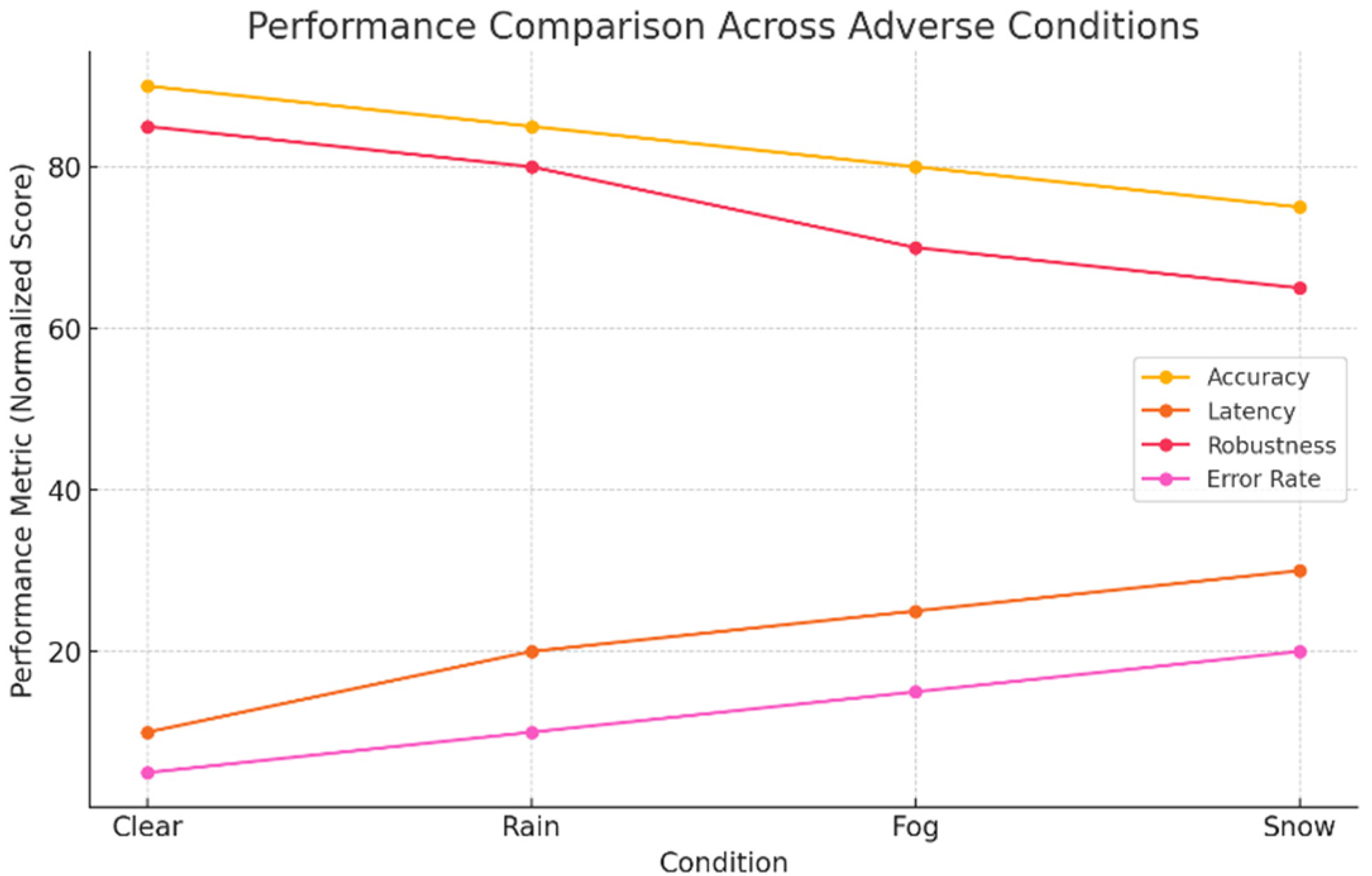
Performance comparison across adverse conditions.
Conclusion
In conclusion, the integration of the UIPS with the SBRBLA using the EKF algorithm presents a robust solution for accurate and reliable localization of autonomous vehicles on roads. By leveraging sensor fusion techniques and advanced algorithms, the system achieves precise positioning, enhancing safety, efficiency, and user experience in various operational environments. The coordinated efforts among vehicle-mounted components, roadside infrastructure, CPUs, communication interfaces, user interfaces, and power supplies ensure seamless operation and optimal utilization of resources. Future work could focus on several avenues to further improve the localization system. Firstly, research efforts could be directed towards enhancing sensor capabilities and expanding coverage to address challenging environmental conditions, such as adverse weather or complex urban landscapes. Additionally, advancements in machine learning and artificial intelligence techniques could be leveraged to refine localization algorithms, enabling adaptive and predictive localization in dynamic environments. Furthermore, the integration of additional sensor modalities, such as LiDAR or radar, could augment the system's robustness and resilience to sensor failures or signal occlusions. Moreover, scalability and interoperability considerations could drive the development of standardized communication protocols and infrastructure deployment strategies, facilitating widespread adoption and deployment of autonomous vehicle localization systems. In essence, the continued innovation and refinement of localization technologies hold the promise of unlocking new frontiers in autonomous transportation, paving the way for safer, more efficient, and more sustainable mobility solutions in the future.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data will be available upon the request to corresponding author
Appendix
Latex code.
\documentclass{article}
\usepackage[ruled,vlined]{algorithm2e}
\begin{document}
\begin{algorithm}[H]
\KwData{Sensor measurements from UIPS and SBRBLA}
\KwResult{Estimated vehicle position}
Initialization: Set initial state estimate $x_0$ and covariance matrix $P_0$\;
\While{not converged}{
\textbf{Prediction Step:}\\
Predict vehicle state at time $k$ using motion model: $\hat{x}_{k|k − 1} = f(\hat{x}_{k − 1|k − 1})$\;
Predict error covariance matrix: $P_{k|k − 1} = F_k P_{k − 1|k − 1} F_k^T + Q_k$\;
\textbf{Measurement Update Step:} \\
Calculate Kalman gain: $K_k = P_{k|k − 1} H_k^T (H_k P_{k|k − 1} H_k^T + R_k)^{−1}$\;
Update state estimate: $\hat{x}_{k|k} = \hat{x}_{k|k − 1} + K_k(z_k − h(\hat{x}_{k|k − 1}))$\;
Update error covariance matrix: $P_{k|k} = (I − K_k H_k)P_{k|k − 1}$\;
}
\caption{Extended Kalman Filter (EKF) Algorithm for Localization}
\end{algorithm}
\end{document}