
Abstract
At present, traditional analysis methods sometimes show incompatibility when analyzing the degree of freedom (DOF) of parallel mechanisms. In this research, a new DOF analysis method (MV-DOF method) based on primary-ancillary motion theory is developed. The 4PPRRR series-parallel mechanism is taken as an example, the analysis results by using the MV-DOF method are compared with those of traditional inverse helix theory and modified Grübler-Kutzbach formula, respectively. The comparison shows that this MV-DOF method can always analyze the DOF of the 4PPRRR series-parallel mechanism accurately, while the other two traditional methods show inapplicability sometimes. During the analysis, an important rule is also found that the ancillary motion is equivalent to local constraint helix motion, but it is not always true in turn. Based on this MV-DOF method, a DOF cutting analysis way is also suggested. Any output point on a complex mechanism can be taken as a cutting point, along which the mechanism can be cut into two independent sub-mechanisms. The output DOF of each sub-mechanism can be analyzed separately by using the MV-DOF method, then the intersection can be obtained as the DOF of the whole mechanism at this output point. This research provides a new and effective analytical way for DOF analysis of parallel mechanisms.
Introduction
Grübler-Kutzbach formula1–4 (abbreviated as the G-K formula), based on basic arithmetic operations, has been widely used for determining the degree of freedom (DOF) of the mechanism, which mainly includes two forms of plane mechanism and space mechanism. In recent years, parallel mechanisms have attracted wide interest and have been proposed.5–7 However, some parallel mechanism was found with exceptions to the above formulas with the developments of mechanism. Through systematic analysis, Gogu 8 pointed out that the traditional formula for fast calculation of DOF is not suitable for some modern parallel mechanisms. Isaksson et al. 9 reported the inapplicability of this method for a class of 3-DOF parallel manipulators with axis-symmetric arm systems. Many researchers have attempted to look for new DOF analysis methods.10–13 During this period, a DOF analysis method based on the inverse helix theory was developed and applied well,14–16 which avoided the nonlinear problem caused by using the unified coordinate system to analyze the different branches of the parallel mechanism, and greatly simplified the analysis process. On this basis, Huang et al. 17 further developed a general DOF formula based on the inverse helix theory, referred to as the modified G-K formula, which has been successfully used for DOF analysis of many complex mechanisms that cannot be solved by traditional G-K formulas. However, the above studies mainly focused on the numerical calculation of the DOF, and they were not based on the mathematical representation of the motion dimension of the object's motion trajectory in space to analyze the composition, transformation, and synthesis of the basic elements of its input and output. Moreover, none of them distinguished the output primary motion and the output ancillary motion, and reflected the relationship between the input motion and output motion, thus affecting the analysis accuracy.
In this research, we clearly define the primary motion and ancillary motion of the parallel mechanism for more accurate DOF analysis. It is worth noting that the ancillary motion we refer to here is different from the parasitic motion in the parallel mechanism. As we all know, parasitic motion often occurs in the parallel mechanism. It is a lower amplitude motion that occurs on non-independent DOF.18,19 Although the value is small, it has a great influence on the application of parallel mechanisms. At present, scholars’ research on parasitic motion is mostly focused on [PP]S and 2R1 T types of parallel mechanisms. The main purpose of this research was to find mechanism configurations without parasitic motion or control methods to reduce parasitic motion.20–23 However, here we clearly distinguish the output motion into primary motion and ancillary motion. The primary motion here refers to the output motion element of the same form as the input motion, and it is obtained by the input motion element through one-to-one transfer mapping. The ancillary motion defined in this research has a different form from the input motion, which is obtained by a comprehensive correlation of two or more specifically combined input motion elements, and is caused by the non-independent transfer mapping of input motion. The purpose of this distinction is not to reduce ancillary motion but to better analyze the relationship between the input motion and the output motion, and more accurately obtain the DOF of the parallel mechanism.
In this paper, based on the primary-ancillary motion theory and its six-element characteristic numerical method, a new analysis method (MV-DOF method) is constructed. Taking the 4PPRRR series-parallel mechanism as an example, the DOF analysis results by using this proposed method are compared with those of traditional inverse helix theory and modified G-K formula respectively. The comparison results show that, for a complete 4PPRRR series parallel mechanism, these two traditional methods can accurately obtain the DOF, but there are obvious errors when some motion pairs with the same spatial configuration are added or reduced in branch chains of the mechanism. However, the MV-DOF method can always correspond to the transformation evolution process of the parallel mechanism, and can accurately calculate the DOF regardless of the change of the branch chains.
Compared with traditional DOF analysis ways, this MV-DOF analysis method proposed here has the following characteristics: the primary motion and ancillary motion of the mechanism are explicitly distinguished, the DOF analysis process is based on the mapping relationship between the input and output primary-ancillary motion, this method shows higher accuracy and applicability in analyzing the 4PPRRR series-parallel mechanism than traditional ways. In addition, an important rule is also revealed during the analysis that the ancillary motion is equivalent to local constraint helix motion, but local constraint helix motion is not exactly the ancillary motion.
Primary-ancillary motion
Motion is introduced into the mechanism through the input motion joints in the mechanism, and is synthetically transformed into the motion of the output joints or members by the combined joint action of multiple joints. The basic motion elements of the input joints include linear motion elements and rotational motion elements.
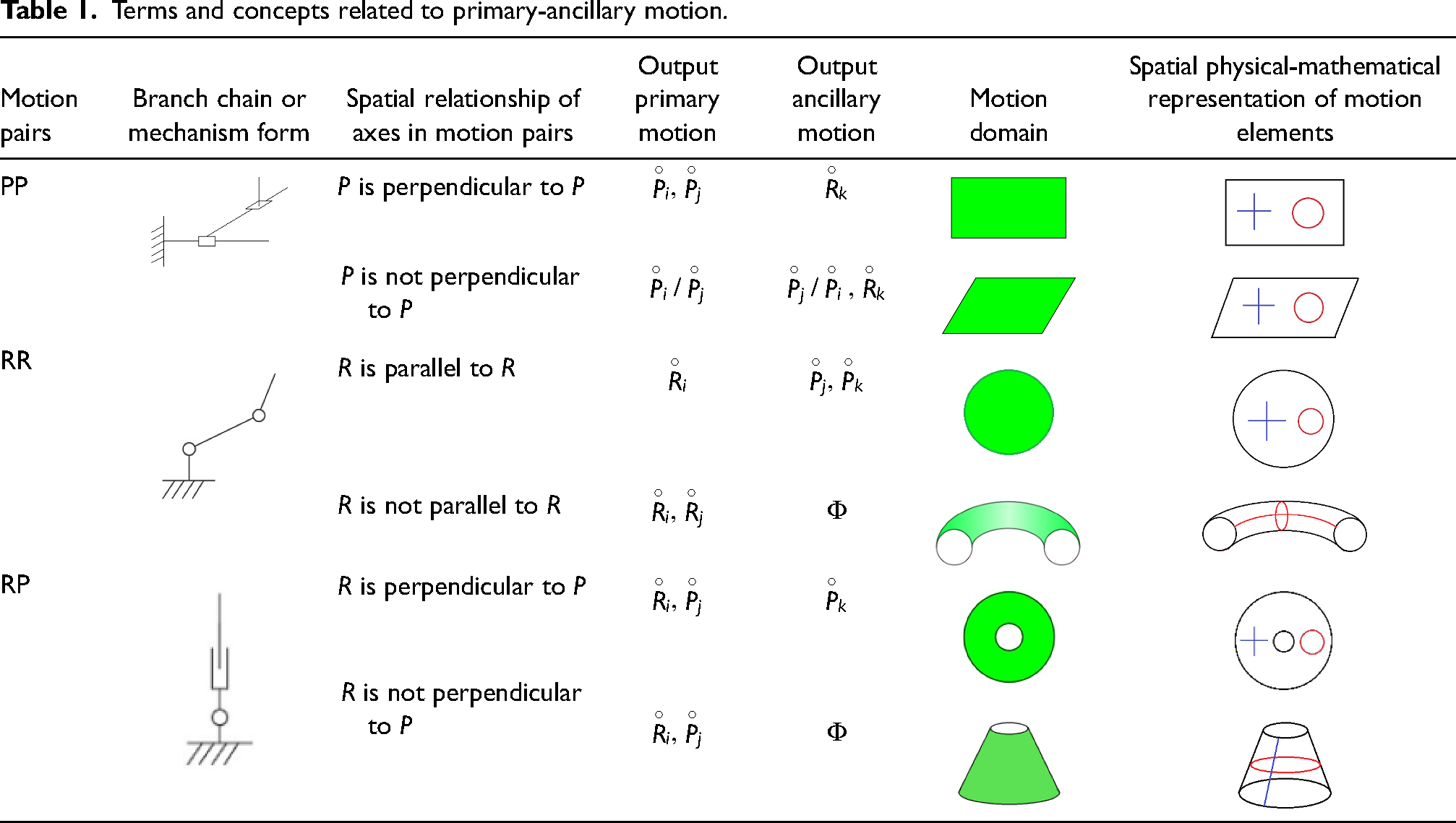
First, when the branch chain or mechanism has a combination of PP motion pairs, there are two cases of perpendicular and non-perpendicular spatial axes of the two motion pairs. When their spatial axes are perpendicular, the corresponding input motion trajectory in space is integrated into a spatial plane rectangular domain. The input motion corresponds to two independent orthogonal linear motions in the space coordinate system. Based on the spatial physical-mathematical representation, the output motion contains two independent orthogonal linear motions in the same direction as the axes of the input linear motion and also contains one non-independent rotational motion that is orthogonal to the axes of the input linear motion and is obtained by the combined action of the two input linear motion elements.
Second, when the branch chain or mechanism has a combination of RR motion pairs, there are also two cases of parallel and non-parallel spatial axes of the two motion pairs. When their spatial axes are parallel, the corresponding input motion trajectory in space is integrated into a spatial plane circular domain, the input motion corresponds to two independent parallel axes of rotation motion in the space coordinate system. The output motion contains one independent rotational motion in the same direction as the axis of the input linear motion and also contains two non-independent linear motions that are orthogonal to the axis of the input rotational motion and are obtained by the combined action of the two input rotational motion elements.
Third, when the branch chain or mechanism has a combination of RP motion pairs, there are also two cases of parallel and non-parallel spatial axes of the two motion pairs. When their spatial axes are perpendicular, the corresponding input motion trajectory in space is integrated into a spatial plane circular ring domain, and the input motion corresponds to a rotation motion and a linear motion whose axes are perpendicular to each other. The output motion consists of one linear motion in the same direction as the axis of the input linear motion and one rotation motion in the same direction as the axis of the input rotation motion, and also one non-independent linear motion which is orthogonal to the input rotational motion and the input linear motion, and obtained by the combined action of the two input motion elements.
The output independent motion obtained in the above three cases is defined as the primary motion and the output non-independent motion obtained is defined as the ancillary motion.
Terms and concepts related to primary-ancillary motion.
In order to describe the input motion, output primary motion, and output ancillary motion of the branch chain or mechanism scientifically and effectively, and to lay the foundation for subsequent mathematical operations and realization of programmed operations, the following definitions and relevant operation rules are given.
Operator symbols. The superposition or synthesis between and within motion pairs is represented by the generalized plus “ Six-element matrix description of motion. The input and output primary linear motions along the spatial axes x, y, and z are represented by the symbol
Comparison of different DOF analysis methods for parallel mechanism
The inverse helix theory and the modified G-K formula are commonly used to analyze the DOF of parallel mechanisms. The inverse helix theory is based on the basic helix theory. By establishing the motion helix system of the mechanism, the inverse helix system can be calculated and the DOF of the mechanism can be analyzed. The modified G-K formula is also based on the basic helix theory, but the difference is that the over constraint and the general constraint in parallel mechanism are redefined by inverse helix theory, so as to determine the constraint of the mechanism more conveniently. Different from these two traditional methods, the MV-DOF method proposed in this paper clearly distinguishes the output primary motion and output ancillary motion of the mechanism, and realizes the accurate DOF analysis based on the mapping relationship between the input motion and the output primary and ancillary motions.
In this article, a 4PPRRR series parallel mechanism is adopted as an example, as shown in Figure 1. The DOF analysis results by using the MV-DOF method are compared with the two traditional methods above.

Sketch of a 4PPRRR parallel mechanism.
Here, the PRRR-3PPRRR (delete the motion pair
For the 4PPRRR parallel mechanism, based on the helix theory, the motion helix system of branch chain 1 can be obtained as follows:





Analysis of the four branches of the mechanism based on the MV-DOF method is given as follows: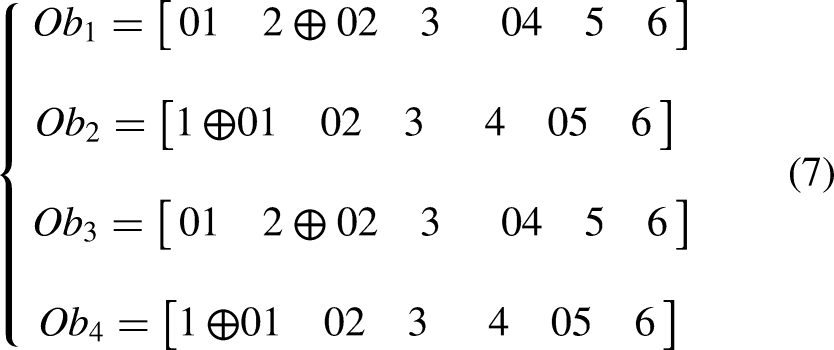

Comparison of different DOF analysis methods for the same mechanism.
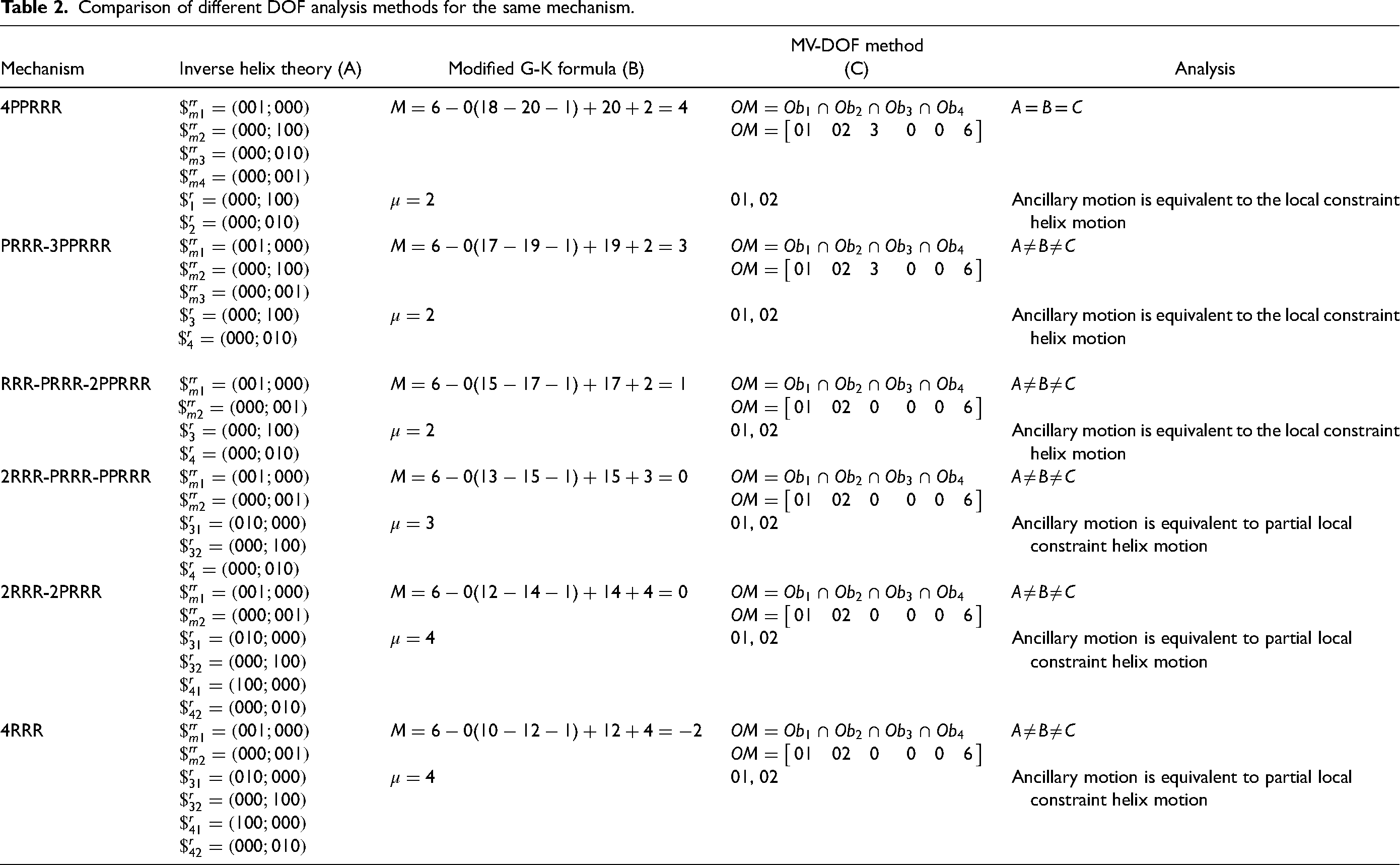
Similarly, for the 2RRR-PRRR-PPRRR parallel mechanism, 01 and 02 correspond to the linear ancillary motion along the x-axes and y-axes directions, respectively. The local constraint helix
The same branch chain in the same mechanism is analyzed by the above method, similar features are also found. Taking the 4PPRRR mechanism as an example, the output ancillary motion on branch chains 1 and 3 are both linear motion along the x-axes and y-axes directions and rotational motion around the x-axes, while the local restraint helix motion on branch chains 1 and 3 correspond to the linear motion along the x-axes. The output ancillary motion on branch chains 2 and 4 is linear motion along the x-axis and y-axis directions and rotational motion around the y-axis, while the local restraint helix on branch chains 2 and 4 corresponds to the linear motion along the y-axis. Similarly, for other branch chains of the PRRR-3PPRRR, RRR-PRRR-2PPRRR, 2RRR-PRRR-PPRRR, 2RRR-2PRRR, and 4RRR parallel mechanism, there are also cases in which the output ancillary motion of the branch chain does not correspond exactly to the local restraint helix motion.
Careful analysis of the DOF results obtained by different methods in Table 2, it can be seen that sometimes A is equal to B, sometimes it is not, and even sometimes B is clearly wrong. The calculation results of C show good correspondence to the process of metamorphic evolution of the parallel mechanism example. Therefore, compared with traditional inverse helix theory (A) and modified G-K formula (B), the MV-DOF method (C) can always correspond to the transformation and evolution process of the parallel mechanism, and accurately analyze the DOF of the mechanism regardless of the change of the branch chains. In addition, it can also reflect the mapping relationship between input motion and output motion. The output primary motion elements are obtained by independent transfer mapping of the input motion elements, whereas the output ancillary motion elements are obtained by non-independent transfer mapping of the input motion elements.
DOF cutting analysis of mechanism based on the MV-DOF method
DOF of the mechanism is a measure of the output motion capability characteristics of the mechanism. Its essence is the mathematical representation of the possible motion forms of space linear motion and rotational motion at the output point. In order to conveniently analyze the DOF of an output point on the mechanism, especially for the complex mechanism, the output reference point can be used as the end point, along which the mechanism can be cut into two independent parts. These two parts do not affect each other and can be used as two independent sub-mechanisms. This MV-DOF method presented in this research can be used to analyze the output motion capability of each sub-mechanism independently. Finally, the intersection is obtained and used as the DOF of the whole mechanism at this output point. In special cases, the DOF of an output point on the simple mechanism can be obtained by simply observation.
DOF cutting analysis of the plane mechanism
For the selected cut at the output reference point of the plane mechanism, the cut is marked as a red line segment and labeled as 
DOF cutting analysis is applied for a parallelogram mechanism in Figure 2 and a common quadrilateral mechanism in Figure 3. The direction perpendicular to the paper surface is defined as the z-axis direction, it can be seen by simple observation that


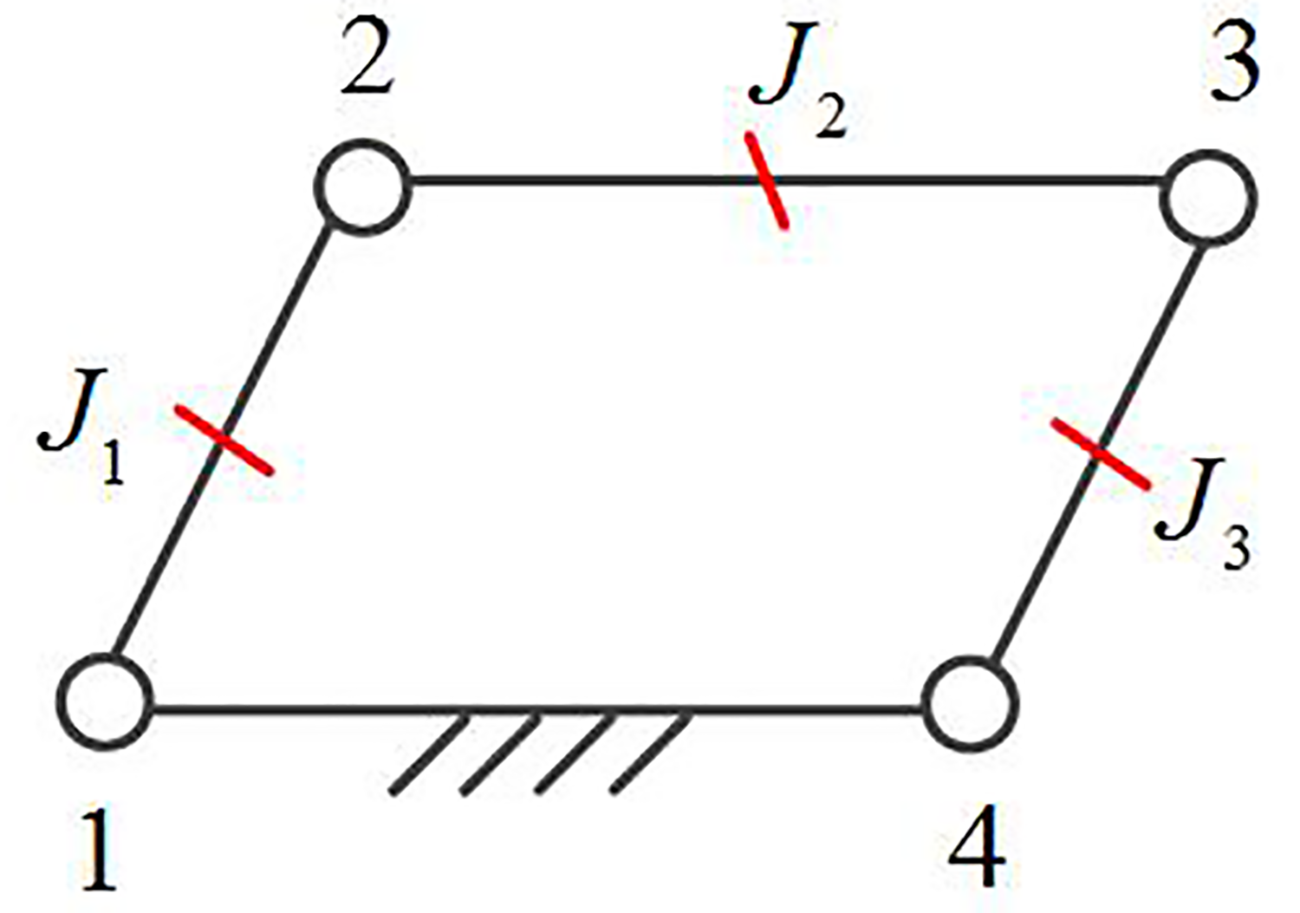
Sketch of the degree of freedom (DOF) cutting analysis of a parallelogram mechanism with fixed rods.

Sketch of the degree of freedom (DOF) cutting analysis of a common quadrilateral mechanism with fixed rods.
Similarly, for the common hexagon mechanism shown in Figure 4, it can also be observed that




Sketch of the degree of freedom (DOF) cutting analysis of a common hexagon mechanism with fixed rods.
From the above analysis, it can be concluded that there are two possible forms of DOF output for the mechanism shown in Figures 2 to 4. One output form is one rotational motion around the z-axis, such as
DOF cutting analysis of space mechanism
For a space mechanism in Figure 5, the space coordinate system is constructed as shown. The output motion at the output point E will be analyzed. 

Sketch of the degree of freedom (DOF) cutting analysis of a space mechanism.
Considering the inclusion relationship 
Conclusions
In this article, based on the primary-ancillary motion theory and its six-element characteristic numerical method, a new DOF analysis method (MV-DOF method) of parallel mechanism is constructed, and the following conclusions are obtained through example analysis and verification:
There are inaccuracies and inapplicability in DOF analysis of the 4PPRRR series-parallel mechanism by using traditional inverse helix theory and modified G-K formula. The MV-DOF method proposed in this paper shows higher accuracy and applicability. The ancillary motion is the motion constrained off by the local constraint helix, but the motion corresponding to the local constraint helix is not exactly the ancillary motion. The output reference point on the mechanism can be taken as the cutting point, along which the mechanism can be cut into two independent sub-mechanisms. The output DOF of each sub-mechanism can be analyzed independently by using the presented MV-DOF method, then the intersection can be taken as the DOF of the whole mechanism at this output reference point.
Compared with the traditional inverse helix theory and the modified G-K formula, specific symbols, and operation rules are defined in this MV-DOF method, the primary motion and ancillary motion of the mechanism are distinguished, and the mapping relationship between input motion and output motion is clearly reflected. Higher accuracy and better applicability are shown in analyzing the parallel mechanism example. This research solves the DOF analysis which cannot be accurately analyzed by traditional methods, and provides a new and effective DOF analytical way for parallel mechanism.
Footnotes
Acknowledgements
The authors would like to give their acknowledgment to the Natural Science Foundation of Hebei Province of China (No. E2019508105), the Central Guiding Local Technology Development Foundation of Hebei Province of China (No. 246Z3706G), and the Science and Technology Research Foundation for Higher Education Institutions of Hebei Province of China (QN2017410) for the financial support on this article.
Additional declarations
The authors declare that all the figures/tables are created by the authors of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science and Technology Research Project of Higher Education Institutions in Hebei Province, Natural Science Foundation of Hebei Province of China (grant numbers QN2017410 and E2019508105).