
Abstract
Underwater target detection technology is an important mean for the development and utilization of marine environment, which has important value in commercial and military fields, and is valued by more and more experts, scholars, and production technicians. A set of behavior-based autonomous underwater vehicle online task planning algorithm is proposed in this article, including the searching behavior based on changing Z-shape, tracking behavior based on an improved artificial potential field theory with likelihood map, rediscovering behavior, and source declare behavior. The proposed algorithm can improve the accuracy and success rate of autonomous underwater vehicle to the source positionficient. The physical experiment results verify the effectiveness of the proposed method.
Keywords
Introduction
The method and strategy of autonomous underwater plume tracking using an autonomous underwater vehicle (AUV) are crucial to improving the efficiency of the detection and positioning operations. Primary search tracking methods are olfactory based. Olfaction is a long-range perceptual behavior widely used by animals for foraging and breeding activities. 1 –4 Olfactory function is an important tool for the survival of organisms surviving in nature, playing an important role in many areas such as finding prey, marking territories, attracting mates, 5,6 dividing groups, 7,8 and avoiding natural predators. 9 Applying olfactory detection to AUV search tasks can effectively solve the problem of underwater plume tracking and source location and improve the efficiency of underwater plume detection and location operations. How to use olfactory cues for target search remains a challenge, 10 and active olfactory technology is the key to solving this problem. In active olfactory technology, chemical and other auxiliary sensors are loaded into a robot, and search algorithms are used for plume tracking and source localization. 11,12 The main applications of active olfactory technology include pollution source tracking and localization, such as hazardous chemical warehouse inspection, 13,14 earthquake scene search and rescue, 15,16 and fire scene rescue. 17
Conventional active olfactory techniques are based on bionic principles. Berg and Brown first proposed the application of the olfactory-based approach to robotic olfaction research by installing two chemical sensors at different locations on the robot. Using the concentration differences detected by the sensors, the robot determines the two concentration values and travels at a constant speed in the direction of the higher concentration. 18 But the concentration difference on the two sides is not obvious, so the search efficiency will be relatively low and cost a lot of time. Belanger and Willis, 19 Grasso et al., 20 and Edwards et al. 21 conducted a study on bionic-based plume tracking strategy. In bionic methods above, the rules of tracking movement are fixed, because the rules are predesigned based on the tracking movement of the organisms (moth and lobster). So bionic methods above are not conducive to source localization in a complex flow field environment. Some scholars studied passive and active plume tracking strategies that mimic the behavior of moths 22 and designed a behavior-based task planning algorithm for the AUV implementation of this tracking strategy, 23 and the experimental results confirmed the effectiveness of the method. 24 However, this method is not applicable in high Reynolds numbers flow environment since the plume information is discontinuous, and the tracking success rate is low. 25
In complex turbulent environments, tracking strategies based on bionic principles exhibit low tracking efficiency. This is because they do not utilize advanced computational and storage resources, which causes the robot to perform many meaningless repetitive tracking motions. In recent years, navigation methods based on the intelligent theory have been proposed. Using informatics and control theory, an efficient plume search path was planned, and the robot follows the path toward the predicted source location. Vergassola et al. 26 proposed a tracking detection method based on odor control information and coding theory, that information trend “infotaxis.” The role of information in this method is similar to that of concentration in “chemotaxis.” The strategy involves maximizing the expected speed of information acquisition in a local area and using a mathematical model to simulate the propagation process of the plume. Farrell et al. 27 used the hidden Markov calculation method, which is based on the plume model of a large-scale horizontal laminar flow, to simulate and verify the feasibility of estimating the plume diffusion path. Flow tropism can also be used as a tracking method by an AUV to determine the source of a chemical plume. The AUV can also directly counter the current or increase the flow at a certain angle by following the concentration of chemical information in the flow field to reach the source of the plume. Ishida et al. proposed a multistage search algorithm to improve the adaptability of the AUV during the source location process to the surrounding environment, 28 and Russell proposed the plume center upwind algorithm. 29 Vasilijevic et al., 30 Malisoff and Zhang, 31 and Dadgar et al. 32 studied on the chemical plume tracking algorithm by multirobot. Ishida et al., 33 Shigaki et al., 34 and Soares et al. 35 used robot and unmanned aerial vehicle for tracking the plume. The simulation experiment results verified the effectiveness of the methods above.
Based on previous research, the method of combining flow-field tropism and information tropism is the general strategy of an AUV for searching and locating chemical plume.
Based on the intelligence theory, we propose an underwater source tracking and localization method for the AUV, including the following contents: Searching behavior is designed based on changing Z-shape, which can be changed according to the change of the searching area, so as to improve the efficiency of the search. Tracking behavior based on the improved partially observable Markov decision process (improved artificial potential field (APF)) can plan the optimal tracking path. A new form of rediscovery is proposed, which fully makes up for the deficiency that the three-leaves algorithm
23
is easy to deviate from the source position. The source declare behavior based on the source likelihood map by using improved partially observable Markov decision process (improved POMDP)
36
is designed to carry out purposeful source confirmation in the areas with high source probability value to avoid blind plume source confirmation.
The results of simulation and physical experiments can verify the feasibility of the planning method proposed in this article.
Chemical plume tracking and localization strategy
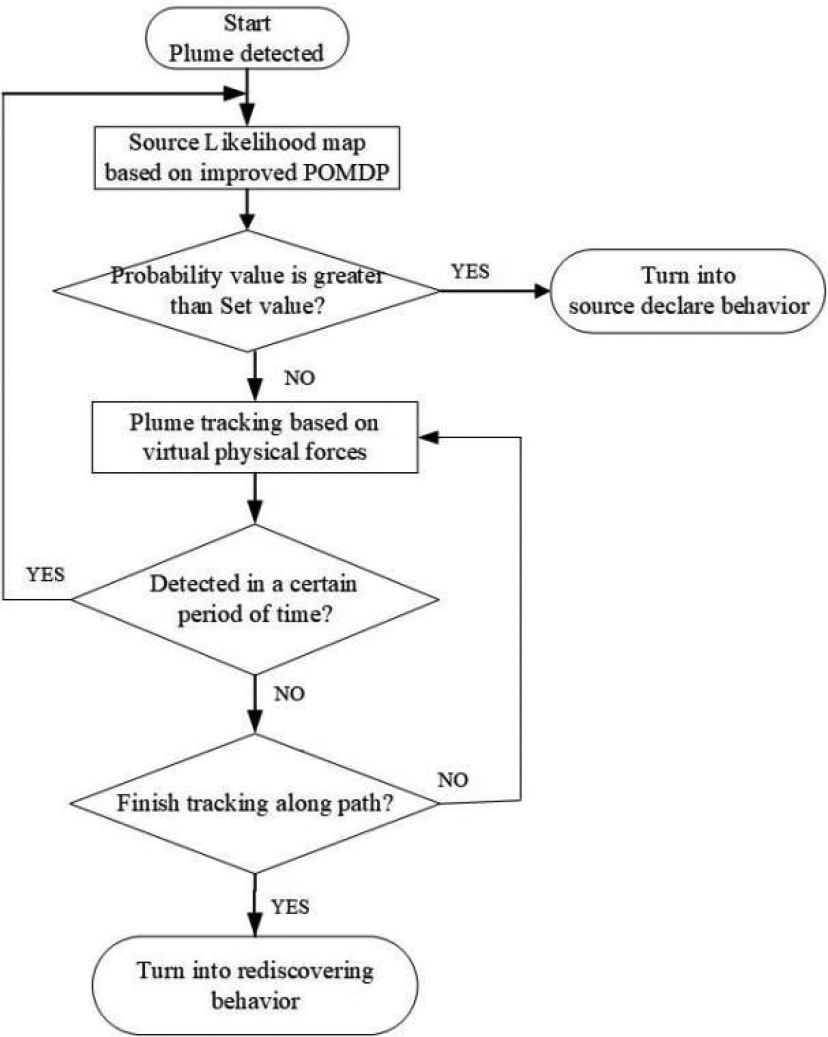
In this part, the whole searching and localization task is set into four processes: plume searching behavior, plume tracking behavior, plume rediscovering behavior, and source declare behavior, as shown in Figure 1.

The framework of proposed tracking and localization method.
Plume searching behavior
At the beginning, the AUV starts a large-scale search from the downstream to upstream of the whole search area, which is called plume searching behavior. Plume searching behavior is the first step, so it is key to the next search step and even the whole task. The current methods of a large-scale search mainly include rectangular comb-shape search and spiral search. The rectangular comb-shape search takes a lot of time. The spiral search only moves along a preset path, so the AUV often loses the plume information. Based on above, this article proposes a searching behavior based on changing Z-shape, which is shown in Figure 2.

Plume searching behavior with changing Z-shape.
In Figure 2, the whole search area is called “
The shaded area in Figure 2 is defined as the area has been searched by the AUV moves along the path ①. We define the ratio of the area has been searched to 1.
In this case, to save subsequent search time, a relatively small search angle 2.
In this case, the AUV is in the middle of the search area. The continuity of the plume is better than in case 1, and the gap between plume is relatively smaller. Therefore, the probability of detecting plume in this area is relatively high. So multiple fold back searches in this area are performed by using a large search angle for detecting the plume, and the value of 3.
In this case, the AUV is most closest to the source location. If the AUV still cannot detect the plume, it needs to perform more fold back searching to avoid the failure of task. In this search area, the continuity of the plume is the best. Therefore, to increase the chances of detecting the plume, the value of
The value of
Plume tracking behavior
If the plume information is detected, the AUV starts the plume tracking behavior. It is the most important step in the whole tracking and location task. The improved APF method and the source likelihood map are combined for tracking the plume. The commanded heading angle of the AUV at each moment can be calculated, and the AUV can continuously adjust position through the heading angle command, so the plume can be tracked by the AUV effectively.
In this article, the APF 37 –39 is applied to plume tracking behavior. The AUV moves in the APF, which contains the gravitational field and the repulsion field. The repulsive force field is generated by the obstacle, and the gravitational force field is generated by the plume information. In the plume environment, the AUV cannot reach the target position when the target is near the obstacle. To solve the problem, the traditional APF has been modified, the repulsive force field is removed, and the gravitational force field is retained. In the improved APF method, the AUV is only acted by the gravitational force field, and it can accurately move forward toward the source position.
The source position is uncertain, and the calculated source likelihood map is used to generate gravitational force field for attracting the AUV. The source likelihood map shows the probability values of the plume source exists in each grid at the current moment. The larger the probability value, the greater probability of the plume source exists in the grid.
When the AUV moves in the flow field, a w × w grid region is generated around the AUV. The direction of the AUV movement can be obtained by improved APF method, as shown in Figure 3. The circle in Figure 3 is the AUV, and the arrow is the direction of the resultant force

Schematic diagram of improved APF method. APF: artificial potential field.
The



The direction of F represents the commanded heading angle of the AUV in the next moment, and the AUV will track along the calculated commanded heading angle until the AUV arrives nearby the source. The flow of plume tracking behavior is presented in Figure 4.
The framework of plume tracking behavior.
Plume rediscovering behavior
In nature, after the creature loses the olfactory information, it will search repeatedly near the lost point. For example, after the male moth lost the plume information, it will move back and forth in the direction perpendicular to the flow direction and move slightly in the countercurrent direction to achieve the purpose of searching the plume again in a small area. 40,41 In this part, if the AUV lost plume information for a while during plume tracking behavior, it will turn into plume rediscovering behavior. Based on the rediscovery path of the male moth, we propose the multi-triangular rediscovery algorithm, which is shown in Figure 5.

Schematic diagram of multi-triangle rediscovery algorithm.
In simulation and physical experiments, the

The framework of plume rediscovering behavior.
Source declare behavior
Source declare behavior is the last stage of plume tracking and localization task. Normally, when a creature reaches the vicinity of the source, it will confirm the source through its own senses (visual and touch). But the AUV is not equipped with the corresponding vision and tactile sensors, and it cannot perform accurate source declare through other sensory systems like living things. For confirming the source, the likelihood map
26
is combined with the position information of the latest measured. When the probability of the source is greater than the set threshold

Schematic diagram of source declare behavior.
The red point
Simulation experiment results
The simulation experiment is debugged in the underwater semi-physical simulation system. The structure of the simulation system is shown in Figure 8. The whole simulation system is shown in Figure 9.

The underwater semi-physical simulation system.

Simulation operation pictures.
In the simulation experiment, the whole search area is 100 m × 100 m, as shown in Figure 10. The source position is set at the point a (70 m, 50 m). The search area is divided into 50 × 50 grids, and each grid area is 2 m × 2 m, which fits the size of the AUV. The flow velocity value is a random value between 0 m/s and 1 m/s, the flow direction range is −45° to 45° (set the negative direction of the X-axis as the positive direction), and the sampling period is 0.5 s, planning search duration is 5 s, the loss period is 30 s (if the plume information is lost for 30 s, the AUV enters in the rediscovering behavior), and 40 pieces of velocity/flow direction information can be retained. The “accompany window” grids are 11 × 11, the concentration threshold value is set to be 0.2 μg/L, and movement speed of the AUV is 1.5 m/s. We perform simulation experiments for plume searching behavior, rediscovering behavior, and source declare behavior in different flow field environments. The results are shown in sections “Simulation 1: Plume searching behavior,” Simulation 2: Plume rediscovering behavior,” and Simulation 3: Plume declare behavior .

Simulation platform in flow field environment.
Simulation 1: Plume searching behavior
The AUV starts from coordinate

Simulation of plume searching behavior.
Simulation 2: Plume rediscovering behavior
The AUV starts from the initial location, coordinate (0 m, 100 m). At t = 47 s, the AUV detects plume information for the first time at point

Simulation based on proposed method.

Simulation based on bionic method.
In Figure 13, the AUV performs rediscovering behavior when plume information lost based on three-leaves algorithm. The whole process is more complicated and takes more time. In Figure 12, based on multi-triangular rediscovery algorithm proposed in “Plume rediscovering behavior” section, combining the likelihood map the AUV can perform a more explicit rediscovery search near the plume lost area, and the process is more accurate and simple. The simulation results demonstrate the high efficiency of proposed rediscovery algorithm.
The test is repeated 30 times in different flow field environment. Table 1 lists statistical results of all 30 tests. According to the experimental results, the plume rediscovering behavior can adapt to different flow field environment, and the plume can be quickly detected again, and also has a high success rate. Comparing to the bionic method, purposed method has a higher success rate (86.7% vs. 66.7%), which reflects the autonomy and intelligence of the purposed method, as shown in Table 1.
Success rate of bionic method and purposed method.

Simulation 3: Plume declare behavior
In Figure 14, the AUV starts performing source declare behavior at t = 227 s. At this moment, the location of the maximum probability value is coordinate (68 m, 48 m), and the probability value is 0.9115 (red area in Figure 14). The AUV makes two confirmations along the path, the results are the same, no plume is detected 5 m upstream of the coordinate (68 m, 48 m), but plume is detected 5 m downstream of

Simulation based on proposed method.
In Figure 15, based on bionic method, the AUV has moved around the source several times before confirming the source location. Comparing the two methods, proposed source declare behavior has a higher accuracy.

Simulation based on bionic method.
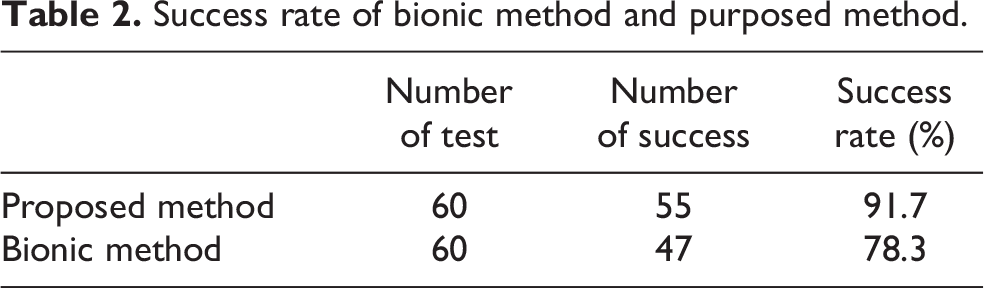
The test is repeated 60 times in different flow field environment. Table 2 lists statistical results of all 60 tests. Comparing to the bionic method, purposed method has a higher success rate (91.7% vs. 78.3%).
Success rate of bionic method and purposed method.
Simulation experiment results of plume source tracking and localization task
The AUV starts from the initial position and enters the plume searching behavior. The colored area in Figure 16(a) to (f) is the source likelihood map, the darker the color, the higher the representative probability value. In Figure 16(a), less plume information is obtained at the initial moment, the probability value of most areas are the same, and the probability value of the areas that were searched by the AUV is reduced (lighter color area). At t = 52 s (Figure 16(b)), the AUV detects the plume information for the first time and switched to plume tracking behavior. At this time, the likelihood map was updated and small dark area appeared in the upstream direction of the AUV. From t = 52 s to t = 205 s, the AUV uses improved APF method to calculate the direction of the plume tracking and moves continuously along the tracking direction, as shown in Figure 16(c) to (e). In Figure 16(f), the AUV performs the source confirmation behavior, and the red dot position in Figure 16(f) is the position with the maximum probability value. Through multiple simulation experiments, the AUV can succeed finding the source position. Table 3 lists statistical results of all tests. Comparing to the bionic method, purposed method has a higher success rate (95% vs. 80%) and has shorter search time (227 s vs. 278 s). So, the results can verify high efficiency and intelligence of the purposed method.

AUV searching and localization at different steps in simulated flow environment. (a) t = 40 s; (b) t = 52 s; (c) t = 128 s; (d) t = 150 s; (e) t = 205 s; (f) t = 242 s.
Success rate and search time of bionic method and purposed method.

Physical experiment in real water environmental platform
Experiment environment
The water depth of the experimental area is 3–5 m. The flow velocity measured by the flow meter in the experimental area is about 0.1 m/s, and the flow direction changes between −25° and −45°. The rhodamine reagent is released in water to simulate the plume (the release amount is about 1–2 g/min), as shown in Figure 17. The released rhodamine diffuses under the action of water flow to form plume. To observe the spread of the plume, the source location is placed 0.2 m below the water surface. Because plume is distributed near the water surface, the distribution of plume is not only affected by currents but also by water surface waves. In experiment, the water surface waves are extremely small, which has little effect on the plume distribution.

The rhodamine reagent (simulated source).
The AUV (as shown in Figure 18) is equipped with an electronic compass MPU6050 (microprocessor unit), global position system (GPS), and a rhodamine sensor (Rhodamine-WT) which can measure the concentration of chemicals in the water. GPS is used for the AUV localization. The rhodamine concentration threshold is set to

The experimental AUV. AUV: autonomous underwater vehicle.
The whole search area is divided into 30 × 60 grids, 1800 grids. The size of each grid is 2 m × 2 m, which fits the size of the AUV. The grid division is shown in Figure 19. The five-pointed star (✩) represents the location of the simulated source, and the source is in C1135 grid. The experiment stipulates that the forward direction of the AUV is the positive direction of the X-axis, and the direction of the left side of the AUV is the positive direction of the Y-axis.

Grid partitioning of experimental area.
Physical experiment results
Water flow velocity
Speed/direction sensor (AEM213-D) is used on the AUV to measure the water flow velocity and direction. Figure 20 shows the change of water flow velocity during the experiment. The water flow velocity is relatively stable, about 0.1 m/s.

The change of water flow velocity.
The value of the plume concentration
Figure 21 shows the value of the plume concentration detected by the AUV. If the concentration exceeds

The value of the plume concentration.
Plume tracking path of the AUV
The AUV starts searching at

Plume tracking path of the AUV based on proposed method. AUV: autonomous underwater vehicle.
Figures 22 and 23 show the tracking path for two methods. The path is similar in the large-range search process for two methods. In tracking process, based on proposed method in this article, the path gradually smooths as the AUV is near the source position (Figure 22). Based on bionic method the AUV moves along a predetermined tracking strategy, the path is complex (Figure 23). Especially when the plume information is lost, based on proposed method, the AUV performs rediscovering behavior only one time for obtaining plume information successfully, but it takes several times based on bionic method. Comparing with bionic method, proposed method takes less time and moves over shorter distance.

Plume tracking path of the AUV based on bionic method. AUV: autonomous underwater vehicle.
Source likelihood map
Figure 24 shows the likelihood map calculated by the improved POMDP at the initial movement time (t = 0 s). At this time, plume information is not detected, so the probability values of all grids are the same, about 0.000555.

Source likelihood map and probability values of grids at t = 0 s. (a) Likelihood map and (b) probability values of all grids.
Figure 25 shows the likelihood map and probability values when the AUV detected plume information for the first time at t = 387 s. The location of the AUV is in C798 grid, coordinate (36 m, 27 m), and the calculated maximum probability value location is in C980 grid (probability value is 0.2012), coordinate (39 m, 34 m). The distance between the AUV’s location and the highest probability value location is nearly 9 m. “ ” represents the location of the AUV. The likelihood map is used by improved APF method to calculate the search path of AUV.
” represents the location of the AUV. The likelihood map is used by improved APF method to calculate the search path of AUV.

Source likelihood map and probability values of grids at t = 387 s. (a) Likelihood map and (b) probability values of grids.
Figure 26 shows the likelihood map and probability distribution of the plume source calculated by the AUV at the intermediate moment. The time is t = 652 s, the AUV is in C876 grid, coordinate (72 m, 29 m), and the calculated maximum probability value is in C1060 grid (probability value is 0.4125), coordinate (79 m, 35 m). The distance between the AUV’s location and the highest probability value location is about 8 m. The resulting angle of improved APF force is 36.87°. By comparing with Figure 25, it can be seen that the source probability value gradually converges to a small range, and the corresponding source probability value has also increased by nearly 0.22.

Source likelihood map and probability values of grids at t = 652 s. (a) Likelihood map and (b) probability values of all grids.
Figure 27 shows the likelihood map and probability distribution at t = 1012 s. The location of the AUV is in C1071 grid, coordinate (101 m, 34 m), and the calculated maximum probability value location is in C1133 grid (probability value is 0.9093), coordinate (105 m, 35 m). The distance between the AUV’s position and the highest probability position is about 4 m. The resulting angle of improved APF force is 26.57°.

Source likelihood map probability values of grids at t = 1012 s. (a) Likelihood map and (b) probability values of all grids.
From the physical experimental results, the AUV can estimate the source likelihood map in real time, obtain an accurate path for tracking the plume by improved APF method, and effectively track the plume until the source is confirmed.
Heading angle of the AUV
Figure 28 shows the command heading angle curve. From 0 s to 387 s, AUV uses changing Z-shape for searching, and the search angle is ±75°. At t = 387 s, the plume has been detected for the first time, the AUV turns to plume tracking behavior, and the commanded heading angle changed. The new commanded heading angle is calculated by improved APF method. The AUV updates the likelihood map and the command heading angle based on whether the plume information is detected or not, until the plume source location is confirmed.

Curve of commanded heading angle.
The comparison of experimental results
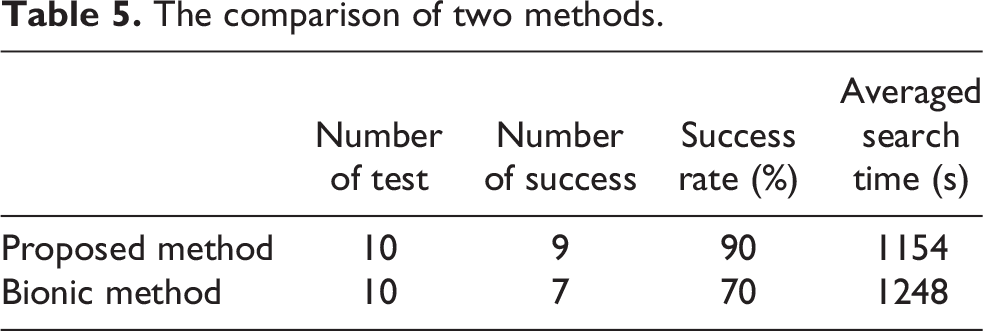
The experiment repeated 10 times for each method in real water environmental platform. In Table 4, proposed method succeeded nine times and bionic method succeed seven times. Table 5 lists statistical results, the success rate of proposed method is 90%, and the search averaged time is 1154 s. The success rate of bionic method is 70%, and the search averaged time is 1248 s. So, the proposed method has higher success rate and shorter averaged time, and the results demonstrate the high efficiency and effectiveness of proposed method.
Search time of two methods.
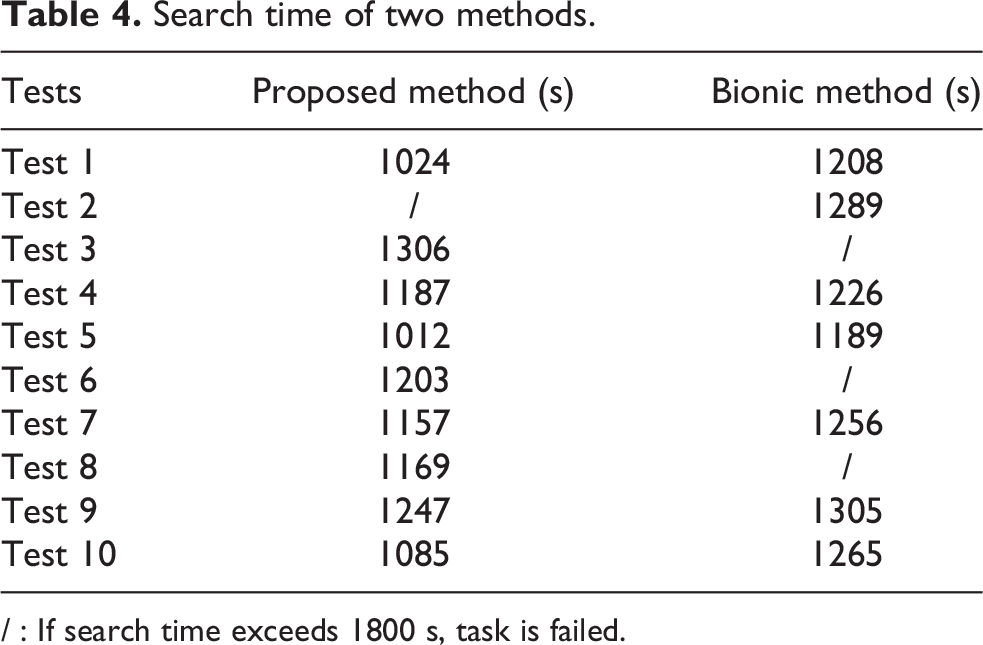
/ : If search time exceeds 1800 s, task is failed.
The comparison of two methods.
Conclusions
In this study, a behavior-based intelligent search and localization method is proposed, including searching behavior, tracking behavior, rediscovering behavior, and source declare behavior. A large-scale search strategy with a variable Z-shaped pattern is designed. Based on the plume information, AUV performs tracking behavior using likelihood map combined with an improved APF theory. Rediscovering behavior can effectively solve the problem of plume information loss and ensure that the AUV can accurately find the source position and confirm the source declare behavior. Compared with bionic method, the simulation results show that the proposed method has the advantages of less time and higher success. The results of physical experiment in real water environment show that the four behaviors proposed in this article have better applicability in time-varying flow environments, and it can complete the task of tracking and localization source well by the AUV in the actual complex environment. Based on the current work in this article, the study of multisource tracking and localization and the application of methods to multirobot systems are all further research contents in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Harbin University of Commerce Funding- Funding number: 2023-KYYWF-1016.