
Abstract
Average-rendezvous problem with connectivity preservation of constant reference signals is investigated for first-order multiagent systems. According to a constructive potential function, a proportional–integral average-rendezvous algorithm is proposed to make agents converge to the average value of constant reference signals as well as the network connectivity is preserved all the time. Sufficient convergence conditions are obtained for the algorithm by designing the proper Lyapunov functions. Numerical examples illustrate the correctness of theoretical results.
Keywords
Introduction
In the past decades, consensus, which is a fundamental collective behavior of multiagent systems, has attracted enormous attention from various research field, and its related research results have been applied in some engineering fields, for example, batch processes, 1 unmanned aerial and ground vehicles, 2 surface vessels, 3–5 and so on. Consensus problem means that the agents reach an agreement on their states of interest by exchanging information locally in a distributed way. 6,7 Average-rendezvous problem studied in this article means that the agents get different reference signals, and the whole goal requires the agents to reach the average value of reference signals with network connectivity preservation. Obviously, average-rendezvous problem is a special consensus problem and is a combination of average-tracking problem and rendezvous problem with connectivity preservation.
Average-tracking problem has attracted a lot of researchers’ interest for its application in distributed mapping, distributed estimation, and data fusion of sensor networks. For the first-order multiagent systems with constant reference signals, which is research object in this article, the proportional–integral (PI) average-tracking algorithm has been proved to be effective to solve the average-tracking problem. 8 –10 In addition, Liu et al. 11 designed a PI average-tracking algorithm based on disturbance’ observers and obtained the sufficient and necessary convergence conditions for the algorithm with identical communication delay by using matrix theory and frequency-domain analysis. Moreover, the PI average-tracking algorithm can also solve the average-tracking problem of agents with unmatched reference signals that some agents get reference signals, but the left agents have no reference signals. 12,13 However, the PI average-tracking algorithm for the time-varying reference signals leads to estimation errors. 10 Besides, some dynamical average-tracking algorithms have been designed and analyzed for the multiagent systems with distinct time-varying reference signals by using different analysis methods. 14 –19
Connectivity preservation has been an important requirement in flocking model of multiagent systems. 20,21 In recent years, rendezvous problem with connectivity preservation, which requires agents to converge to the same location and the connectivity of multiagent network to be guaranteed all the time, has also stimulated some researchers’ interests. To achieve the connectivity preservation, the negative gradient of the potential function based on the agents’ distance is an important part of the rendezvous control algorithm, so various potential functions have been proposed for first-order multiagent systems, 22 –25 second-order multiagent systems, 26 –30 multiple Euler–Lagrange systems, 31 linear high-order multiagent systems, 32,33 and so on. Besides, Hui 34 and Dong 35 designed continuous and noncontinuous control algorithm to deal with the finite-time rendezvous problem of first-order multiagent systems, and connectivity preservation and finite-time convergence have been proved by using semistability theory and nonsmooth stability analysis.
Evidently, there has been little attention paid on the average-rendezvous problem. In this article, we take into consideration the first-order multiagent systems with constant reference signals and aim to solve the average-rendezvous problem with connectivity preservation. Contributions of this article are listed as follows: Agents are interconnected with the help of the position sensors, that is, the topology structure is time-varying as the agents’ positions change. Based on the gradient of the potential function, a novel PI average-rendezvous algorithm is proposed to achieve the average-rendezvous convergence with maintaining the topology connectivity. By using the Lyapunov functions, concise sufficient conditions that depend on the control parameters only are obtained for designing the proposed algorithm.
The remainder of this article is organized as follows. In the second section, we give the problem description. In the third section, the average-rendezvous algorithm is designed, and the convergence analysis of our proposed algorithm is presented in the fourth section. The fifth section provides a numerical example to demonstrate the effectiveness of the theoretical results. Finally, the conclusion is summarized in the sixth section.
Notation. R, Rp
, and
Problem description
Consider the first-order multiagent systems composed of n agents as follows

where
The interconnection topology of agents is formed by agents sensing each other, that is, each agent can obtain its neighbors’ relative positions by sensing equipment. Hence, the interconnection topology depends on the agents’ states and is described as a time-varying graph

We define If if if
In addition,
In this article, we study the average-rendezvous problem defined as follow.
Average-rendezvous Problem. Each agent (1) accesses a constant reference signal

Meanwhile, the connectivity of agents (1) is preserved all the while, that is,
Apparently, the average-rendezvous problem is equivalent to average-tracking with connectivity preservation, and its results can be applied in many engineering applications, for example, target localization of multiple autonomous underwater vehicles. 36
Next, we list a critical lemma that will play important role in the proof of main results.
Lemma 1
If P
4 is invertible,
Distributed algorithms
To preserve the connectivity all the time, we adopt the negative gradient of a potential function. By referring existing potential functions for connectivity preservation, 22 –30,32,33 we design an artificial potential function given by

where

which holds with
According to the definition of function

where

Evidently,

Now, we propose the average-rendezvous algorithm as follows
where
The closed-loop form of agents (1) with algorithm (7) is written as

Define

where

Then, the closed-loop system (9) with our proposed algorithm is illustrated in Figure 1.

Block diagram of PI average-rendezvous algorithm. PI: proportional–integral.
Convergence analysis
In this section, we proceed the convergence analysis of the closed-loop multiagent system (8).
First of all, we claim that the average-tracking is equivalent to the stationary consensus seeking of agents (8).
Lemma 2
The agents (8) reach the average-consensus tracking of constant reference signals asymptotically, if and only if the agents (8) achieve a stationary consensus asymptotically, that is,
Proof
(Necessity) If the agents (8) reach the average-consensus tracking of constant reference signals asymptotically, (2) holds. Hence, the asymptotic stationary consensus is obviously achieved.
(Sufficiency) Let

If the agents reach an asymptotic stationary consensus,

Lemma 2 is proved.
To continue the convergence analysis of system (8), we make the variable transformations

Let

Then, we construct the following Lyapunov function for system (13)

where
Now, we analyze the topology connectivity for agents (8) with the following assumptions:
Assumption 1
Assumption 2
Lemma 3
Under Assumptions 1 and 2, the topology connectivity of agents (8) is preserved for

Proof
With Assumption 1, suppose that the topology of agents (8) is connected over
Theorem 1
Under Assumptions 1 and 2, the average-rendezvous of agents (8) with connectivity preservation is reached asymptotically, if

and

hold, where
Proof
Calculating the derivative of

where

with
The characteristic equation of

which is equivalent to

from Lemma 1, where

Next, we investigate the following equation

When

and it is obvious that two roots of (22) are

and it follows from condition (16) that the roots of equation (23) are all positive real numbers.
Hence, the roots of equation (19) are positive real numbers and zero, and we conclude that
Based on the definition of

with arbitrary
From the definitions of


which implies that the agents (8) reach a stationary consensus, and it is concluded from Lemma 2 that the agents converge to the average value of reference signals. Theorem 1 is proved.
Remark 1
Evidently, the assumption that
Thus,
Evidently, if
Corollary 1
Under Assumptions 1 and 2, the average-rendezvous of agents (8) with connectivity preservation is reached asymptotically, if

holds.
Remark 2
In fact, the condition (25) is relatively conservative, but it is just relevant to the control parameters
Numerical example
Investigate a multiagent system composed of six agents (5) moving in the two-dimensional (2D) space, and some parameters are set as

The initial states of agents are chosen as

Initial topology of agents.
Besides, choose the control parameters α and

Then, we select
With above assigned parameters, thus, the agents reach the average value of reference signals asymptotically. Figure 3 shows that agents’ positions converge to the average-point of reference signals in the 2D space, and the convergence of each component of state variable is presented in Figure 4, in which all the agents’ states reach a consensus. In addition, we illustrate the distances among the agents in Figure 5, but we just provide the distances between agent 1 and others for simplicity in the figure, where

Average-rendezvous convergence.

Evolution of agents’ states.

Distances between agents.

Evolution of the number of edges.
Moreover, to illustrate efficiency of our proposed algorithm for complex multiagent network, we consider the average-rendezvous problem of

Initial topology of
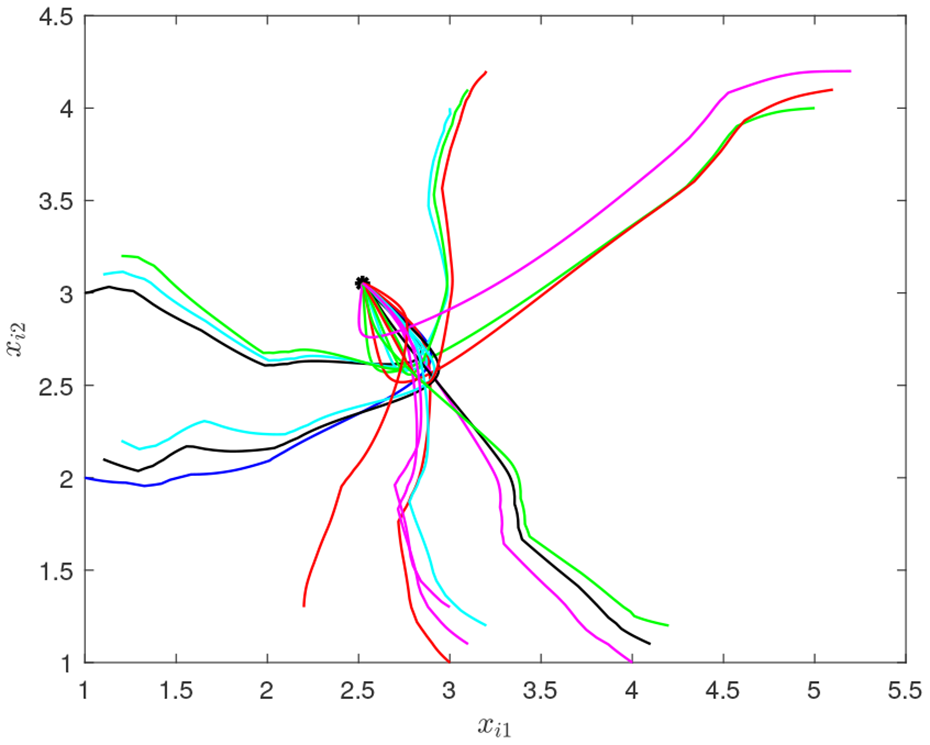
Average-rendezvous convergence of
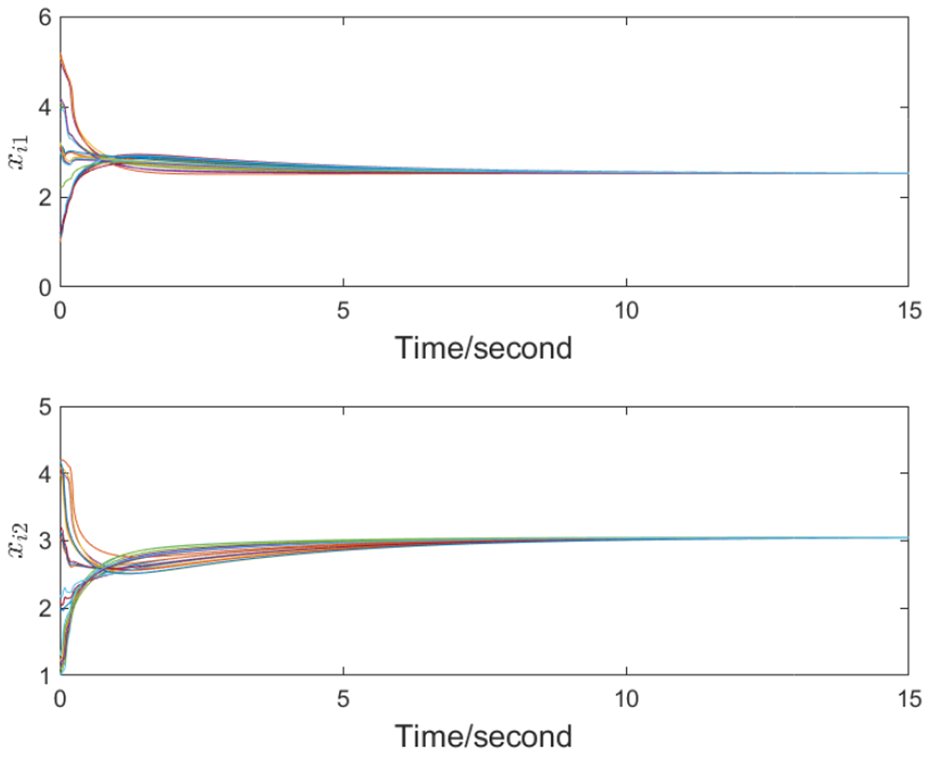
Evolution of
Conclusion
In this article, we study the average-rendezvous problem for the first-order multiagent systems with constant reference signals. Based on the normal PI average-tracking algorithm, we propose two PI average-rendezvous algorithms. One is obtained by replacing the proportional part by the gradient of the potential function, and another one is obtained by replacing the proportional and integral parts both by the gradient of the potential function. With the help of the Lyapunov functions, we get the sufficient rendezvous convergence conditions of two algorithms, respectively. Moreover, a simple condition, which is convenient for setting parameters, is presented for the second algorithm. However, this article just considers the first-order agents with constant reference signals, and the analysis and synthesis of the average-rendezvous problem for complex multiagent systems with time-varying reference signals will be investigated in our future work, for example, surface vessels 3–5 and nonlinear multiagent systems. 37
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article:: This project was supported by the “Qinglan project” of Jiangsu Province and the National Natural Science Foundation of China (Grant No.61973139, 61473138).