
Abstract
Coordinated manipulators can construct a series system, such that all the position error of the end-effector is required to remain within the permissible limit. This article proposed a new method to handle the problem of reliability analysis involving in multiple failure modes. The extreme value of the position error is introduced to construct a surrogate model to replace the original failure event, the moment with fraction order instead of the traditional integer is applied to derive the best-fit distribution of the extreme value based on the maximum entropy principle. The innovations mainly include: (1) the high efficient dimension reduction via the surrogate model constructed with the extreme value and (2) a better probability density function is derived through the fractional moment. A series system consists of three manipulators is used as an example to demonstrate the efficiency and accuracy of the proposed method.
Introduction
Manipulators have been widely used because of their outstanding characters of high efficiency, accuracy, and easy to operation, in which the manipulator is required to work repetitively by hundreds of times. 1,2 However, the error in the process of manufacturing and assembling is unavoidable and can bring about joint clearance and dimensional deviations in linkages, which may finally cause the negative influence (such as the erratic shocks, vibration, and deterioration of motion capability 3,4 ) on the safety and stability during its service life. Evaluating the performance of the manipulator appropriately is the foundation of successful manipulation. Therefore, numerical measurement of the reliability in kinematics can be a significant issue.
The reliability in both kinematics and dynamics is defined as the probability that the manipulator can realize the desired behavior under the influence of parameter uncertainty while meeting some specified requirements. 5 Since then, a lot of attention has been paid to compute the probability of failure. Cui et al. 6 applied Monte Carlo simulation (MCS) method to analyze the reliability of a parallel robot manipulator. Kim et al. 7 developed the first-order reliability method (FORM), in which the computation can be estimated at the most probable point (MPP), the result proved that positional error of the manipulator could scatter around the expected position with an elliptical region. Pandey and Zhang 8 proposed a fractional moment estimation method to handle the reliability analysis problem of the single manipulator for the entire trajectory. With integration of the first-order second moment method (FOSM) and Taylor expansion technique. Lobato et al. 9 presented an optimization method based on a double-loop iteration process, in which differential evolution and inverse reliability analysis can be both adopted for the engineering system design. To overcome the drawback of normal assumption and realize an extension of capacity for the moment-based method, Wang et al. 10 analyzed the manipulator with arbitrarily distributed joint clearance by use of the second-order fourth moment method (SOFM). The result of MCS is often treated as the benchmark to evaluate the other new method because of the high accuracy even though the requirement of large scale of samples makes it quite time-consuming. 11
The research studies mentioned above exhibit an obvious feature in common that the failure model is related with only one performance function since just one manipulator’s behavior needs to be concerned. However, with the rapid development of modern advanced manufacture, the system made up of several coordinated manipulators has drawn an intensive attention. The dominant advantages compared with the single manipulator, such as the effective extension of workspace, much increase in degrees of freedom (DOFs) and the notable enhancement of capacity in payload, makes the multi-manipulator system quite feasible to the field of aerospace, automobile, and so on. 12
Unlike the traditional analysis with only one component, the system reliability needs to evaluate performances of all the correlated subsystems, which is more complicated and can be equivalent to an integral in the multiple dimension space. 13 Precise evaluation confronted with such a sophisticated problem is still an open challenge, particularly, when the system is highly nonlinear. To solve this problem, a lot of research studies has been conducted in the last decade. There are mainly two categories of methods to compute the failure probability. The one is the direct approach according to the definition of the failure probability, and the other is indirect method that a surrogate model is constructed and the approximation technique is adopted.
In the context of the direct methods, due to the difficulty in modeling the correlation among the failure events of each component, the use of an interval instead of a precise value to measure the safety of the series or parallel system can simplify the computation process, with this idea, Cornell 14 proposed the wide bound method. Unfortunately, the accuracy is too poor to meet the demands of practical engineering. Later on, Ditlevsen 15 developed an advanced method (the narrow bound method) which can reduce the range of the result substantially. Safaei et al. 16 designed the series–parallel compound system as a cellular redundant system and proposed the mixed-integral method to obtain the cumulative reliability. The similar idea of interval estimation can be also found in some other literatures. 17,18 The interval estimation is too rough to be suitable for the system where high accuracy is required. Therefore, the indirect method becomes a hot spot and draws more attention.
Kuczera and Mourelatos 11 disjointed the correlated multi-limit states and proposed the approximate metamodel method with the use of the important sampling technique. To further reduce the error originated from the substitution of the limit state, Dubourg et al. 19 developed the Kriging surrogate model-based method, the probability of failure is eventually obtained as the product of an augmented probability. Bichon et al. 20 used a nonlinear polynomial to replace the true limit states, the requirement of the normal process to generate the samples limit the range of its application. An improved adaptive Kriging-based approach was presented to approximate the reliability for a system with the low failure probability, however, the way to generate samples is too strict to be useful in practice. 21 With integration of the design of experiment (DoE) strategy and Markov Chain MCS, Sun et al. 22 proposed a new method in which the learning function is developed to generate the samples to construct the surrogate model. When the distributed type of the input variables are unknown, the probability-boxes (p-boxes) method was proposed, the accuracy of the result can be significantly related with the precision of the p-boxes model. 23 Based on the polynomial chaos expansion and support vector regression (SVR), Cheng and Lu 24 proposed the ensemble learning method, which can be applied for the system having the probability of failure no less than 1 × 10−4. Razaaly and Congedo 25 presented an active learning methodology, the innovation lies in the construction of unbiased estimators of the limit state, but at the price that two more times samples are required. Hu and Du 26 developed a saddle point-based approximation method that exhibits good efficiency since the multi-limit state is directly simplified by a quadratic function, however, when confronted with the system that is highly nonlinear or the performance function is implicit, the approach may be rather limited. Aims to enhance the efficiency of sampling around the limit state, Jiang proposed the general failure-pursuing approach, the greatest work is that the joint probability density function (PDF) is considered and Voronoi diagram is applied. 27
We can easily note that plenty of methods both in terms of the reliability analysis of the single manipulator and the system with multiple components have been proposed. Furthermore, most of the open articles preferred the idea that construct a surrogate model to replace the true limit state and mainly focused on the simple structures, such as the slider-crank, truss structure, and cantilever beam. When the system is composed of several coordinated manipulators, the existing research studies may be not good enough. Some crucial aspects can be still improved that are listed as follows.
The imperfect surrogate model. In general, the surrogate model that aims to replace the original multi-failure regions can be obtained by the polynomial,
26
Kringing model,
21,22
or SVR,
24
with use of the samples that scattered around the true limit state (mean values, saddle point or MPP) and can be generated through the strategies including importance sampling, Latinized stratified sampling, partially stratified sampling, and so on.
28
Therefore, the DoE to select samples can have huge influence on the accuracy of the model. To realize the trade-off between the accuracy and efficiency, increasing the scale of samples (loss of the efficiency) or ignoring some failure regions having little significance according to the sensitivity analysis (loss of the accuracy) is commonly used. As a result, the error of the surrogate model can be originated from two aspects: (1) the components that exhibit dominant effect are reserved while the others are abandoned, which may finally make the analyzed system incomplete and (2) the true limit state consisting of multiple performance functions is simplified and replaced by the polynomial that is derived based on the samples, the dimension reduction can bring about the unavoidable errors.
The unsatisfied approximation process. Through the direct integration in multiple dimension space, the system reliability can be approximated conceptually. Unfortunately, the interval instead of an exact value makes the result too rough to meet the demand in practical engineering. The use of the moment-based methods such as FORM
7
, FOSM,
26
and SOFM
10
to evaluate the surrogate model can be another feasible choice. However, FOSM linearized the performance function roughly at the mean value, and based on the spurious assumption that the output is normally distributed. FORM can optimize the system at the MPP but is still not adequate to analyze a large system, besides, the transformation of correlated variables from the non-normal space to the normal can introduce much errors. SOFM can ameliorate the accuracy at the cost of the much increase of complexity in computation process. Furthermore, the moments with integer order that used in most of current methods may cause the loss of important information especially in the tail of the distribution of system outputs. MCS can outperform all the approximate methods in terms of the accuracy, but the drawback of time-consuming limits the range of application. In a summary, the current approximation methods may not be good enough to describe the significant features when facing the complicated system with a low probability of failure.
With the purpose to analyze the reliability of a series system composed by cooperative manipulators efficiently and accurately, we proposed a new fractional moment with maximum entropy method (FMME). A variable is defined to represent the maximum value among the position error of the manipulators, the extreme value theory instead of the DoE principle is applied to construct the surrogate model. As a result, the original failure model with more than one correlated performance functions can be equivalent to an inequality with respect to the extreme value. The fractional moment instead of integer moment is utilized to feature the distribution of maximum position error, based on the maximum entropy principle, a best-fit PDF can be derived. Therefore, the estimation of system reliability can be completed by the simple integration in one dimension. The significant contributions in our work mainly include three aspects: (1) the stability of a multi-manipulator system is measured from the new perspective of kinematics, while traditional research studies mainly focused on the development of control strategy in dynamics, (2) a better surrogate model is constructed with all the failure region reserved and no information abandoned, and (3) the fractional moment instead of integer moment is used, which can feature the distribution of extreme value with much more accuracy.
The Remainder of this article is organized as follows: The second section describes the probabilistic model of the manipulator, the third section presents the details about the proposed method that mainly include the equivalent transformation and the derivation of PDF with fractional moments. Numerical simulation and an interesting experiment are conducted in the fourth section followed by discussion in the fifth section. Conclusions are summarized in the last section.
Probabilistic model of the manipulator
Forward kinematic with random variables
The local frame attached on the link is constructed to describe relative position between two adjacent joints of the serial manipulator, which can be also called as D-H coordinate system, as shown in Figure 1.

Transformation between adjacent joints.
The transformation process can be formulated by a homogeneous matrix, derived by 29
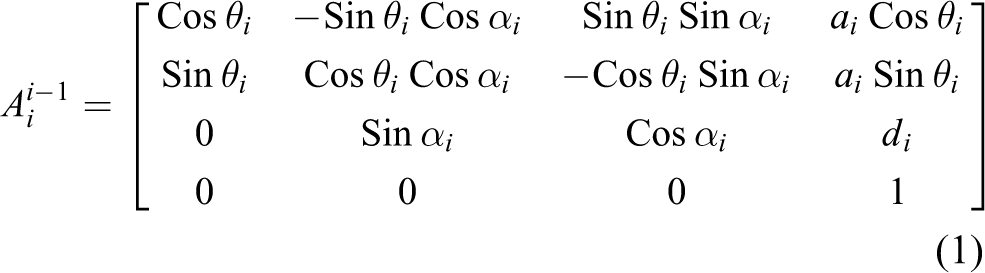
where (ai , di ,ai , θi ) are the D-H parameters of the ith link.
A typical manipulator with six DOFs is used as an example, as shown in Figure 2(a).

Schematic diagram of a serial manipulator: (a) 3D model and (b) D-H coordinates.
The position and orientation of the end-effector can be obtained through a product of a series of homogeneous matrix, according to the local coordinate system drawn in Figure 2(b), which is formulated as

where
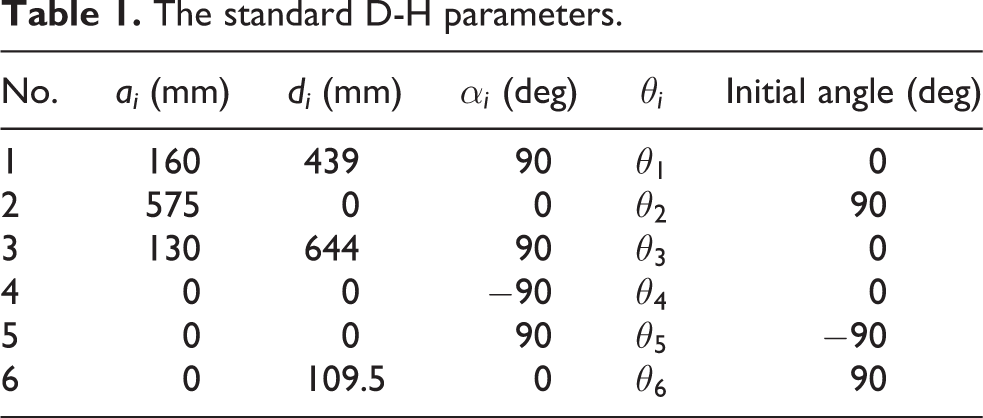
The kinematics is studied based on the 6-DOFs manipulator, the corresponding structure parameters are listed in Table 1.
The standard D-H parameters.
Due to the unavoidable errors that originated from defects of the manufacturing, assembling and material deformation, and so on, the behavior of the manipulator can be seriously affected by those uncertainties. In this work, the dimensional deviations and joint clearances are mainly concerned and they are treated as variables because of the random nature, 7 which are listed in Table 2.
Distribution of the random variables.a

a a 1, a 2, and a 3 are nominal link length, d 1, d 4, and d 6 are nominal link offset, α 1, α 3, α 4, and α 5 are nominal angles of link twists. They are all normal distributed variables with mean value μ and standard deviation σ.
Under the influence of the joint clearance, the actual angle of ith link θi can be modeled as 26

where
With consideration of the impact caused by dimensional deviations and joint clearance, the forward kinematic is

where
Failure probability in kinematics
Because of the influence of the joint clearance and dimension deviations, the actual position of the end-effector may deviate from its expected position.
The possible location with reference to the ideal position can be plotted in Figure 3. This deviation is defined as the position error ε, thus

where

Position error due to the parameter uncertainty.
The unaccepted performance of a manipulator means the end-effector falls outside a permissible region under the influence of random variables, suppose the size of such a safe area is ht , the performance function of reliability can be expressed as

So the probability of failure defined in equation (6) can be computed by

Reliability estimation of the series system based on FMME
Since the manipulator can be treated as the subsystem, the reliability analysis of the multi-manipulator system can be conducted in a similar way, whereas the dependent component can introduce mutual impact on the each other and finally result in multiple correlated potential failure modes, which makes the computation rather complicated. A practical attempt is to work out an appropriate surrogate model to simplify the estimation process. For brevity, the ith manipulator is denoted as R i for the series system with m components.
The equivalent failure model
When manipulators are operated together in a cooperative way. The object can be grasped by end-effectors of all manipulators and naturally can bring about contact force.
As long as any one of the position error of the manipulator exceeds the permissible threshold, the end-effector may be out of the touch with the object. Naturally, the force loaded the object can be changed and the balance of the system is broke, as a result, the object could fall down, which means the task is terminated and failed. Meanwhile, because of the error originated from the failed manipulator, the others can be influenced by the disturbance propagated via the closed-chain of internal force simultaneously. Such the number of m manipulators can be regarded as a series system, the failure mode can be shown in Figure 4.

Series system with multiple manipulators: (a) diagram of failure event for a series system and (b) motion failure for multiple manipulators.
Define the performance function for the ith manipulator as gi
and the joint PDF as

In terms of system reliability combined by more than one inequality, it has been proved that the probability could be evaluated through an equivalent extreme-value event, though each component is correlated. 30
Suppose the maximum position error among the number of m manipulators to be denoted by a variable

So the probability of failure can be estimated with integral of Y in one dimension, which is formulated as

where
Therefore, the key to solve this problem transforms to figure out an appropriate extreme value distribution of Y.
The best-fit PDF with fractional moments
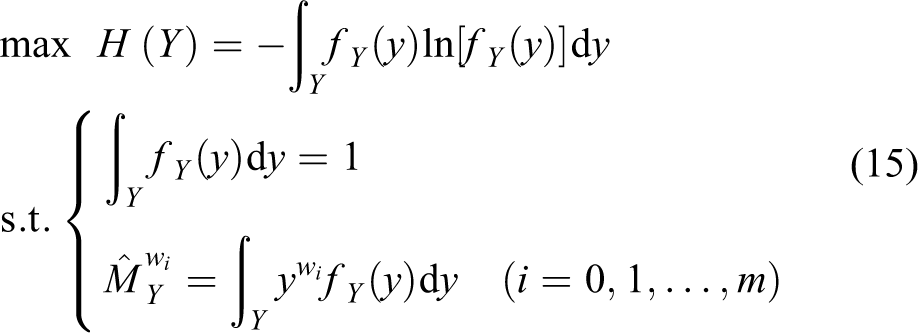
The way to measure the uncertainty of a random variable is the information entropy proposed by Shannon from the perspective of statistic.
31
The information entropy of the variable Y in terms of its PDF

Traditional methods, for example SOFM, use the first four moments with integer order as constrains, which leads to the following generic form of the approximated PDF of Y, we have 10

where
The fractional moments can outperform the integer moments because of the significant feature that they can make better use of the information to describe non-normal distributions. The fractional moment can be defined as

Given a set of N observed samples

Similar to SOFM where statistics moments are used as constrains, there may be more than one solution. It has been approved that the one with a maximum entropy is the most rational and best-fit
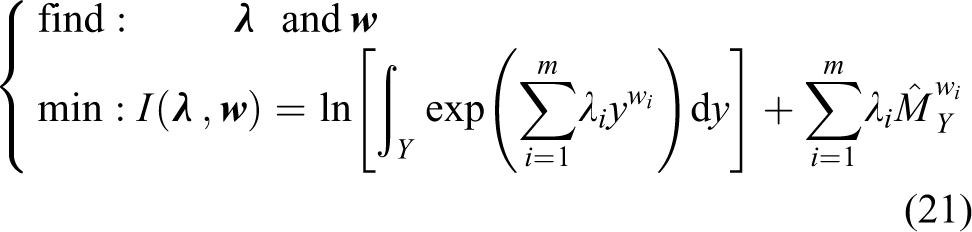
Therefore, the Lagrange multiplier method can be adopted and we can construct the Lagrangian function as

Then the optimal solution can be derived under the important condition that

In practice, the first three fractional moments are sufficient to have an excellent trade-off between accuracy and efficiency. 27 So we can lead to the estimator of the true PDF as follows

According to equation (13), we can further obtain
To figure out all the parameters efficiently, Kullback–Leibler (K-L) divergence is introduced to measure the difference between the ideal PDF,

Based on equation (12), the K-L divergence can be rewritten by

where
The smaller the
This problem can be solved by the simplex search algorithm, and the MATLAB function fminsearch(·) is used.
Since the best-fit PDF of

Main estimation process of FMME. FMME: fractional moment with maximum entropy.
Numerical example and experiment
To better illustrate the problem, a handing system consists of three 6-DOFs manipulators, as shown in Figure 6, is used as an example. All manipulators grasp the spherical object with different posture.

The series system with three manipulators.
The series system may be failed that the object could fall down if any one of the manipulator’s position error exceeds the allowable value. The transformation (
The relative position among all the grasp position is drawn in Figure 7. The manipulators construct the closed configuration through the object (as shown in Figure 7), which can be represented by the equation, given as

where
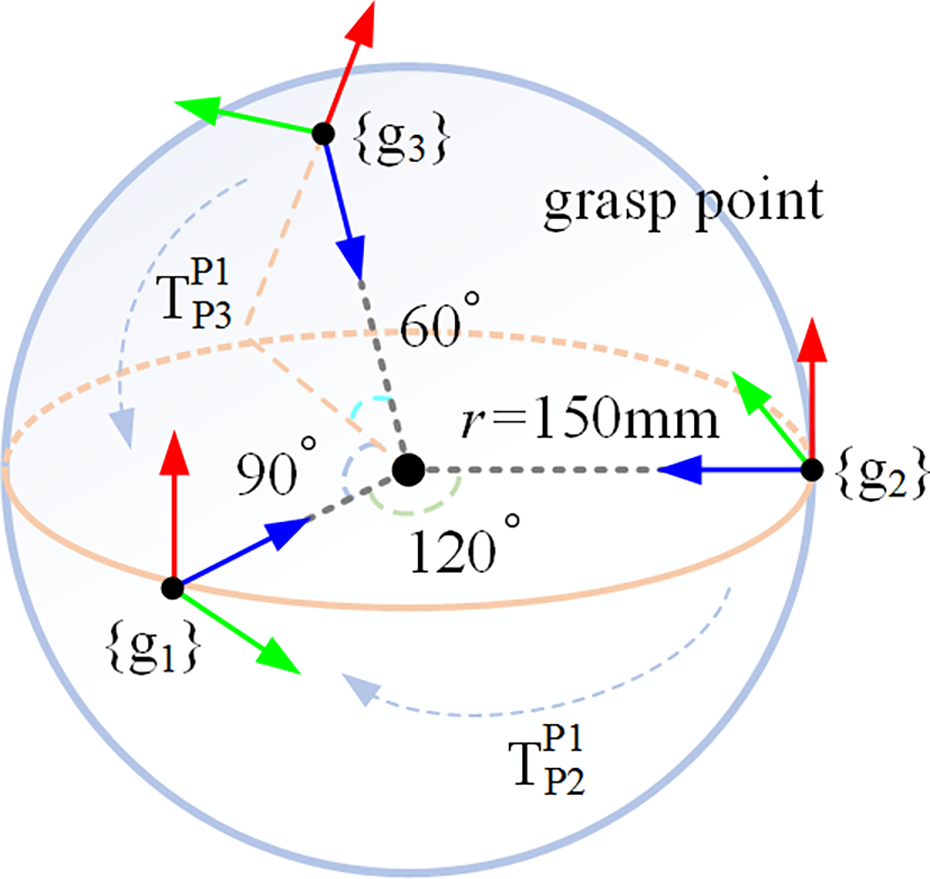
Relative position of grasp points.
The transformation matrixes are listed in Table 3. The designed angles for R1 are
Transformation matrix.

Reliability approximated by different methods
MCS can provide an accurate solution since a large scale of 1 × 105 samples is generated. Therefore, the result of MCS is regarded as the benchmark. Approximated methods make use of moments having the order of integer (FOSM, 26 FORM, 7 and SOFM 10 ) or fraction (FMME) are applied based on a smaller scale of 10,000 samples.
As for FOSM, performance function is linearized at mean value
The Lagrange parameters of SOFM are solved out as λ
0 = 0.384, λ
1 = −3.027, λ
2 = 9.021, λ
3 = −10.056, and λ
4 = 3.875. The optimized fractional order
Parameters of FMME.

FMME: fractional moment with maximum entropy.
The PDF can be naturally created with parameters solved by each method, they are drawn in Figure 8.

Distribution of extreme values estimated by five methods.
As we can see from Figure 8, the distribution of the extreme position error is far away normal, which is actually right-skewed. The PDF optimized by FOSM, FORM, SOFM, and FMME are different especially in bottoms and the top area.
The reliability varied with the size of safe area ht can be computed and shown in Figure 9.

Reliability of the series system.
It can be seen from Figure 9, the reliability can become larger with the increase of the permissible threshold ht . There is much more agreement between the result of MCS and FMME than that for the other three comparative methods.
For example, when ht is 1.3 mm, the reliability computed by MCS and proposed FMME is 0.67056 and 0.66972, the results of FOSM, FORM, and SOFM are 0.68209, 0.68377, and 0.67952, respectively, corresponding estimation errors of four methods are 0.084 × 10−2, 1.153 × 10−2, 1.321 × 10−2, and 0.896 × 10−2, respectively.
To display the accuracy of four approximated methods intuitively, the estimation error is calculated based on the benchmark result of MCS, which can be completed with the following equation

where
The estimation errors can be shown in Figure 10. It is obvious that the FMME can provide a much better accuracy than other three methods do. For example, the extreme estimation error for FMME is −0.2405 × 10−2, in which it can be up to −1.1476 × 10−2 for SOFM and is nearly six times larger.

Estimation errors of each method.
A comprehensive study is conducted to explore inherent characteristics of each method, which can provide a reasonable explanation for the quite different behaviors with the same samples, extreme (maximum or minimum) and average estimation errors are computed and listed in Table 5.
Computation accuracy of each method.
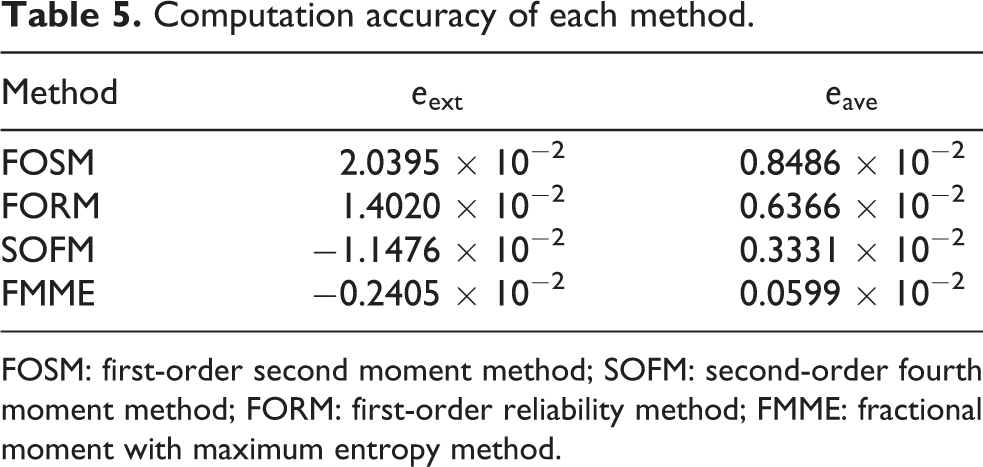
FOSM: first-order second moment method; SOFM: second-order fourth moment method; FORM: first-order reliability method; FMME: fractional moment with maximum entropy method.
Influence of the correlation among coordinated manipulators
Each manipulator in the series system are correlated and can cause impact on the others since a potential closed internal force constrains exists through holding the same object. According to equation (3), the mean and standard deviation of the joint clearance are supposed to be

For simplicity, we suppose that
It is interesting to observe from Figure 11 that the correlation seems to be less significant for the system reliability, the difference of the PDFs describing the distribution is quite small when ρ increases from −1 to 1. For example, when the ht = 1.0 mm and each manipulator has an absolutely positive correlation coefficient (ρ = 1), the value of PDF is 0.7696, whereas the value is 0.7602 with the same allowable threshold ht but a negative correlation coefficient.

The influence of ρ on the system reliability.
Experiment of the cooperative system
Three manipulators (R1, R2, and R3) with the type of Jaka Zu are used to construct the handing system to hold and transport the green ball. The ball is desired to move up vertically and naturally each path of the manipulator can be designed according to the closed configuration, the platform is shown in Figure 12.

Platform constructed with three manipulators.
Each manipulator grasps the ball through the tool and moves in a cooperative way, the ball will fall down if any manipulator fails to track the expected trajectory because of the positional error, the example of failure event is illustrated, as shown in Figure 13. It can be easily seen from Figure 13 that the ball loses the balance since the tool mounted on the flange of R3 is out of the touch with the ball earliest among all the manipulators when t = 6s.

Failure event of the series system.
The experiment has been conducted repetitively 100 times in total and the ball dropped 19 times, at which the number of failure event when the tool disconnected with the ball in the first of three manipulators (R1, R2, and R3) are 2, 3, and 14, respectively, the frequency can be drawn in Figure 14.

The number of failure of three manipulators.
The reason why three manipulators behave so differently is that the service year of each manipulator is different. R1 and R2 were bought in last year (2022) while R3 used more than 3 years has been repaired two times because of a collision. The accuracy of positioning of R3 is much worse than that of R1 and R2 due to the influence of joint clearance and deformation in linkages. Therefore, the probability that the position accuracy can meet the demand (kinematic reliability) is lower. That means, the one (R3) having the weakest capability exhibits the dominant influence on the reliability of a series system.
Discussion
To better understand the problem of reliability analysis of a series system with coordinated manipulators. The comprehensive discussion mainly focused on three aspects is provided, given as follows.
(1) Equivalent failure model in kinematics: Unlike the traditional dynamic analysis of the cooperative manipulators system, in which the key purpose is to develop some advanced and robust control strategies to ensure that the tracking error of joint torque can be converged to zero. The kinematic reliability is mainly concerned about the probability that the position of the end-effector of all manipulators can fall inside the permissible area simultaneously, it results in the system to have multiple failure regions. Robots interacting with an object together generate complex interdependencies and mutual forces, making it extremely challenging to calculate the system failure probability through multiple integrations. In this case, only a rough approximation can be obtained through the direct conceptual multi-dimension integration or an inconvenient surrogate model constructed with sample scattered around the limit state contour which must be strictly generated by the DoE. The introduction of the extreme value to construct an equivalent model makes it possible that a lot of random events (performance functions) can be converted into one random event. The most important is the transformation can guarantee the correlation information be inherent and unchanged, no important property disappears because the maximum value is selected from the sample set generated by the correlated behaviors of manipulators. The efficient simplification of probability integration from multiple dimensions to the only one provides much convenience with remaining high accuracy (more details can be found in Appendix).
(2) Accuracy and efficiency of different methods: It can be easily observed from Figure 8, deviations of the optimized PDF by FOSM, FORM, SOFM, and FMME from the benchmark result of MCS are different. There is much more agreement between the curve solved by FMME and the real distribution. Especially in the top and left bottom, the approximate accuracy of three comparative approximated methods deteriorates dramatically compared with that of FMME. The reason is that fractional moments can include more statistical information with the same samples besides the features that integer moments can describe. The replacement of integer order by fraction helps make better use of samples that scattered far away from the center and asymmetrically distributed in the tail. Those samples usually has a small scale but can play a quite important role for the reliability analysis of a system with non-normal distribution and low probability of failure. In terms of efficiency, MCS performs worst with the requirement of a huge scale of samples (105). All approximated methods analyzed the same samples (104) and obtained moments to derive an appropriate PDF, the statistic information contained in samples is firstly utilized and then estimated method is applied. Obviously, moment-based methods (integer or fraction) can figure out the reliability based on a quite small scale of samples and therefore can promote the efficiency significantly.
(3) Influence of correlation on the series system reliability: When all the manipulators grasp the same object and move along the designed trajectory, they are correlated since the internal force system is formed based on the closed kinematic chain in topology. The disturbance from one manipulator can be propagated to the others and brings about the influence on the actual joint angles involving joint clearance. The position error may be varied and finally causes the effect on the system kinematic reliability. As we can see from Figure 11, the correlation indeed causes some impact on the distribution of extreme value, the PDF varies with the correlation coefficient ρ, but the change of the tendency is subtle. It is because of the nature of the series system, whose reliability mainly depends on the stability of the weakest component. The series system is out of work as long as any one of the manipulators failed to meet the demand of positioning accuracy. For instance, in the three coordinated manipulators system, if the position error of R1 exceeds the required threshold, which makes R1 be out of touch with the object. The object drops down and therefore the system will be failed, no matter how the sudden change of load can cause impact on the other two correlated manipulators. In fact, the behaviors of R2 and R3 are influenced but nothing can be changed since the system failure has been a certain event. That means, the structure of the series system diminishes the importance of the correlation among the manipulators and reduces the influence of correlation on the system reliability.
Conclusions
The purpose of our work is to propose a new moment-based method to analyze the reliability of the series system composed by multiple coordinated manipulators. With use of the extreme value and the fractional moment, the computation process can be much simplified with high accuracy. Some conclusions are made as follows.
(1) The equivalent model with extreme value is quite suitable for the system reliability analysis. There are more than one random events in the series system. Both the inconvenient integration in multi-dimensions and strict sample generation with DoE are no longer needed. The use of extreme value helps a lot to construct an appropriate surrogate model. The dimension reduction can be realized efficiently and accurately with no important property disappeared. The problem of the system reliability analysis can be significantly simplified and finally be equivalent to finding the appropriate distribution of the extreme value, which makes it possible for the application of the moment-based method.
(2) Fractional moments can provide a much more accurate result. The moment with fraction order instead of integer is a great innovation and can be perfect to describe the features of the non-normal distribution. With reference to the benchmark result of MCS, the average approximated error for FMME is the smallest among all the four methods, which about 0.05 × 10−2, that means the FMME can enhance the accuracy by at least five times. In terms of efficiency, MCS is based on the scale of 105 samples, while other methods are much more efficient since the number of the samples is 104. Therefore, with comprehensive consideration of accuracy and efficiency, FMME outperforms than other methods.
(3) The correlation among manipulators exhibits little influence on the reliability of a series system. Coordinated manipulators in the series system are mutually effected by each other, the disturbance from one manipulator to the others is random and may finally bring about the influence on the system reliability because of the change of joint clearances. The nature that the weakest chain having the dominant influence reduces the impact caused by the correlation among the manipulators. The distribution of the extreme position error can remain almost the same though the correlation coefficient varies from the perfect positive correlation (ρ = 1) to the negative one (ρ = −1). That means, the reliability of the series system is not so sensitive to the correlation among the manipulators, more effort should be made to ensure the stability of the manipulator having the lowest reliability.
Footnotes
Author contributions
WW designed the research. WW, ZX, and RH derived the mathematical formulas and wrote the program. QL and JW helped to complete the manuscript and were charge of the project. GL gave the theoretical guidance on the work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Natural Science Foundation of Zhejiang Province (no. LQ22E050022), the National Natural Science Foundation of China (no. 52175032), and the Key R&D Program of Zhejiang Province (Nos. 2023C01180, 2021C04017, and 2020C01025).
Appendix 1
The equivalent model with extreme value is widely used in structure reliability analysis. This appendix provides the summary of the idea by using a typical series system involving two correlated performance functions.
According to the definition of the failure event of the series system with two coordinated manipulators, we have
where x and y are correlated variables and
The first part of double integrals in the above formulation denotes the probability that can be equaled to the area S1. In a similar way, the second part can be represented by the area S2. Therefore, the total probability of the failure Pf can be rewritten as S = S1 + S2, the original model can be drawn in Figure 1A(a).
The extreme value z can be obtained from the comparison between the variables x and y, the formulation is written as
Therefore, the probability of failure in terms of z can be represented by the equivalent model, formulated as
The first part with double integrals represents the probability of failure under the situation where (1) x is bigger than y and extreme value z equals to x and (2) extreme value z = x is bigger than ht . It can be also equaled to the area S4, as shown in Figure 1A(b). Similarly, the second part can be proved to be equaled to the area S3.
So the total probability that z is bigger than ht can be computed as S′=S3 + S4. It can be easily observed from Figure 1A, that S = S′, which proves that equation (24) equals to equation (1C). Namely, the equivalent model based on extreme value is valid. The process can be easily extended to a system with more than two random events.